
Definiciones, notación y proposiciones básicas de matemáticas
Universidad Politécnica de Madrid Escuela Técnica Superior de Ingenieros Industriales Definiciones, notación y proposiciones básicas de matemáticas José Luis de la Fuente O’Connor [email protected] [email protected] Madrid, Curso 2015-2016 E N ESTA INTRODUCCIÓN a la asignatura Matemáticas de la Especialidad–Ingeniería Eléctrica se recopilan conceptos, definiciones, relaciones y resultados que puede ser útil recordar o considerar para seguir su desarrollo de manera provechosa. Todos o casi todos se han estudiado en otras asignaturas de cursos anteriores a aquél en el que se imparte ésta. En ningún caso es un exhaustivo recordatorio de las matemáticas elementales que debe conocer un ingeniero industrial. También se introduce una cierta notación que, de forma uniforme, trataremos de usar en todas las lecciones y presentaciones de las clases. 1 Conjuntos Un conjunto es una colección de objetos: los números naturales, las soluciones de un problema determinado, los municipios de una provincia, etc. Se identifica por una letra mayúscula: el conjunto S , el conjunto de los números naturales N, el de los enteros Z, el de los reales R, complejos C, racionales Q, etc. Cada uno de los objetos en la colección es un elemento o miembro del conjunto. Si un elemento a pertenece a un conjunto se indica a 2 S . Los conjuntos se definen mediante la enumeración entre llaves de sus elementos, S D fa; b; : : : g, o especificando, también entre llaves, la propiedad que los caracteriza, S D fx W x 2 R; x 2g: números reales menores o iguales que dos. El conjunto sin elementos se denomina vacío, designándose ;. Ejemplo: el conjunto S de los números reales x que son mayores que 1 y menores que 0: esto es, S D fx 2 R W x > 1; x < 0g. Si S y S 0 son dos conjuntos y todos los elementos del conjunto S 0 lo son de S , se dice que S 0 es un subconjunto del conjunto S , o que está contenido en S 0 , expresándose S 0 S o S S 0 . T. La unión de dos conjuntos S y T , expresada S [ T , es el conjunto formado por los elementos que pertenecen a S o a La intersección de S y T , expresada S \ T , es el conjunto formado por los elementos que pertenecen a S y a T . Si S 0 es un subconjunto de S , el complemento de S 0 en S es el conjunto formado por los elementos de S que no pertenecen a S 0 . Si a y b son números reales, y a b, el conjunto de números x de la recta real tales que a x b se indica Œa; b. El formado por los x tales que a < x b, por .a; b. El de los x que verifican que a < x < b, por .a; b/. Si S es un conjunto no vacío de números reales acotados superiormente —mayorados—, existe un número real mínimo y tal que x y para todo x 2 S . Al número y se le denomina cota superior mínima o supremo de S ; se expresa así: sup .x/ x2S o sup fx W x 2 S g : De forma similar se define la cota inferior máxima —o ínfimo— de un conjunto S no vacío de números reales acotados inferiormente o minorados: Kınf .x/ o Kınf fx W x 2 S g : x2S 2 Aplicaciones Dados dos conjuntos S y T , una aplicación, transformación o mapeo f de S en T , expresada como f W S ! T , es una asociación o criterio que a cada elemento de S hace corresponder uno de T . La imagen de un elemento x 2 S con la aplicación f W S ! T es el elemento f .x/ 2 T . El conjunto imagen f .S / = ff .x/ 2 T; para todo x 2 S g. La imagen de un subconjunto S 0 S con la aplicación f sería, por consiguiente, el subconjunto imagen f .S 0 /. El conjunto S se conoce como origen o dominio de definición y el T como dominio de valores. Una aplicación f W S ! T se dice inyectiva si para cualquier par de elementos x; y 2 S , x ¤ y, se cumple que f .x/ ¤ f .y/. Ejemplo, la aplicación f W R ! R, definida por f .x/ D x 2 , no es inyectiva, pues f .1/ D f . 1/ D 1. Una función es un caso particular de aplicación en donde los conjuntos origen e imagen son conjuntos de números: R, C, Z, N, etc. Una aplicación f W S ! T se dice suprayectiva —sobreyectiva, epiyectiva, suryectiva o exhaustiva— si el conjunto imagen f .S / es igual a todo el conjunto T ; es decir, para todo y 2 T existe un x 2 S tal que f .x/ D y. Una aplicación se dice biyectiva si es inyectiva y suprayectiva. Ejemplo, si Jn es el conjunto de los números enteros de 1 a n, Jn D f1; : : : ; ng, y se define una aplicación W Jn ! Jn que modifica el orden de disposición de los elementos de Jn —estas aplicaciones se denominan permutaciones—, tal aplicación es biyectiva. 1 Una función es un caso particular de aplicación en donde los conjuntos origen e imagen son conjuntos de números: R, C, Z, N, etc. Una aplicación f W S ! T se dice suprayectiva —sobreyectiva, epiyectiva, suryectiva o exhaustiva— si el conjunto imagen f .S/ es igual a todo el conjunto T ; es decir, para todo y 2 T existe un x 2 S tal que f .x/ D y. Una aplicación se dice biyectiva si es inyectiva y suprayectiva. Ejemplo, si Jn es el conjunto de los números enteros de 1 a n, Jn D f1; : : : ; ng, y se define una aplicación W Jn ! Jn que modifica el orden de disposición de los elementos de Jn —estas aplicaciones se denominan permutaciones—, tal Un conjunto S se dice numerable si existe una biyección entre N y S : a cada unos de los n elementos k, 1 k n, aplicación es biyectiva. se le asocia un elemento aUn S , esto 7! ak . si existe una biyección entre N y S : a cada unos de los n elemenk 2 conjunto S sees: diceknumerable tos k, 1 k n, se le asocia un elemento ak 2 S, esto es: k 7! ak . Una sucesión de elementos de un conjunto T es una aplicación de N en T : a cada elemento n 1 se le hace corresUna sucesión de elementos de un conjunto T es una aplicación de N en T : a cada elemento n 1 .1/ ponder un x .n/ 2 T : n 7! x .n/ . Tal sucesión fxsucesión ; x .2/se; expresa : : : g ocomo fx .n/fxg.1/n1 . ;:::g o .n/ expresa como se le hace corresponder un xse 2 T : n 7! x .n/ . Tal ; x .2/ fx .n/ gn1 . Los conjuntos dotados de ciertas leyes de composición o asociación interna —adición, multiplicación, división o Los conjuntos dotados de ciertas leyes de composición o asociación interna —adición, multiplicacualquier otra—, se dice que poseen una otra—, estructura. Las estructuras algebraicas fundamentales son grupo, anillo (Z ción, división o cualquier se dice que poseen una estructura. Las estructuras fundamentales grupo, (Z por ejemplo), cuerpovectorial. (R y C, por ejemplo) y espacio vectorial. por ejemplo), cuerpo (Rson: y C, poranillo ejemplo) y espacio R C 3 Espacios vectoriales Z Q N 4 Un espacio vectorial E es una estructura algebraica creada a partir de un conjunto no vacío, una ley de composición interna definida para los elementos del conjunto, adición, con la siguientes propiedades —grupo conmutativo—, xCy DyCx .x C y/ C z D x C .y C z/ xCøDx x C . x/ D ø; y una ley de composición externa, producto por un escalar, definida entre dicho conjunto y otro conjunto, K, con estructura de cuerpo, con las siguientes propiedades, 1x Dx ˛.ˇx/ D .˛ˇ/x .˛ C ˇ/x D ˛x C ˇx ˛.x C y/ D ˛x C ˛y; válidas cualesquiera que sean x; y; z en E y ˛; ˇ en K. A ø se le denomina elemento neutro y a x el opuesto de x. Es usual denominar vectores a los elementos de E y escalares a los de K. En las aplicaciones que se estudian en la asignatura los casos más importantes ocurren cuando K D R o K D C. Con la notación K designaremos a cualquiera de los cuerpos R o C y por x un vector cualquiera de un espacio vectorial. Un ejemplo característico de espacio vectorial lo constituye el formado por sucesiones ordenadas de n elementos cualesquiera de K, o n-uplas x D Œx1 ; : : : ; xn , definiendo la suma de vectores mediante Œx1 ; : : : ; xn C Œy1 ; : : : ; yn D Œx1 C y1 ; : : : ; xn C yn y el producto por un escalar mediante ˛Œx1 ; : : : ; xn D Œ˛x1 ; : : : ; ˛xn : Otro espacio vectorial muy conocido es Pn , de polinomios de grado n, pn .x/ D reales o complejos, n 0. 2 Pn kD0 ak x k , con coeficientes ak , Si X es un conjunto arbitrario, el conjunto de aplicaciones ' W X ! K se estructura también como un espacio vectorial definiendo las operaciones .' C / W x 7 ! '.x/ C .x/ .'/ W x 7 ! '.x/ : El ejemplo anterior es un caso particular de este espacio vectorial tomando X D f1; 2; : : : ; ng. Un subespacio M , de un espacio vectorial E sobre un cuerpo K, es un subconjunto no vacío cerrado respecto de las operaciones de adición y producto por un escalar; es decir, se cumple que: 8x; y 2 M H) x C y 2 M; 8x 2 M y 8 2 K H) x 2 M: La intersección de una familia cualquiera de subespacios de E es también un subespacio. Si X es un subconjunto cualquiera de E, el subespacio engfXg engendrado o generado por X es la intersección se todos los subespacios que contienen a X . Cuando engfXg D E, se dice que X es una parte generadora de E. Dados vectores x1 ; : : : ; xn y escalares 1 ; : : : ; n , el vector formado según la expresión x D 1 x1 C C n xn se dice que es combinación lineal de los vectores x1 ; : : : ; xn de coeficientes 1 ; : : : ; n . Un subconjunto X de E es un subespacio si y sólo si contiene a cualquier combinación lineal de cualquier subconjunto finito de vectores de X. También se demuestra que el subespacio engfXg es el conjunto de todas las combinaciones lineales de vectores de X. Un conjunto de vectores x1 ; x2 ; : : : ; xk se dicen linealmente dependientes si existen escalares i , no todos cero, tales P que kiD1 i xi D 0 ; linealmente independientes, si k X i D1 i xi D 0 H) i D 0; 0i k: Una parte X de un espacio vectorial E se dice que es una familia libre si los vectores de cualquier subconjunto finito de X son linealmente independientes. La dimensión de un subespacio es el máximo número de vectores linealmente independientes en el subespacio. Una base de un espacio vectorial E es cualquier subconjunto B de E que sea, simultáneamente, una parte libre y generadora de E; dicho de otra forma, una base de un espacio vectorial es un conjunto —normalmente se supone ordenado (numerado)— de vectores linealmente independientes que engendran (o generan) dicho espacio. Se demuestra que cualquier espacio vectorial tiene una base y que todas las bases de un mismo espacio tienen la misma cardinalidad —se pueden poner en biyección—. Cuando el cardinal de las bases es un número natural, n 2 N, se dice que el espacio es de dimensión finita n. En un espacio vectorial K n , 2 3 2 3 2 3 1 0 0 6 7 6 7 6 7 6 0 7 6 1 7 6 0 7 6 7 6 7 6 7 e1 D 6 : 7 ; e2 D 6 : 7 ; : : : ; en D 6 : 7 ; 6 :: 7 6 :: 7 6 :: 7 4 5 4 5 4 5 0 0 1 forman una base en dicho espacio; éste, por tanto, tiene dimensión n. Esta base se denomina base canónica de K n . En esta base, cualquier vector x T D Œx1 ; x2 ; : : : ; xn se puede expresar de la siguiente forma: 2 3 2 3 2 3 2 3 x1 1 0 0 6 7 6 7 6 7 6 7 6 x2 7 6 0 7 6 1 7 6 0 7 6 7 6 7 6 7 6 7 6 : 7 D x1 6 : 7 C x2 6 : 7 C C xn 6 : 7 : 6 :: 7 6 :: 7 6 :: 7 6 :: 7 4 5 4 5 4 5 4 5 xn 0 0 1 Si A y B son subconjuntos de un espacio vectorial E, el conjunto A C B se define como: A C B D fa C b W a 2 A; b 2 Bg : Cuando A y B son subespacios, también lo es la suma A C B. Si además A \ B D ;, la suma se denomina directa, escribiéndose A ˚ B. Si A ˚ B D E, cualquier vector c 2 E se descompone de manera única como c D a C b, con a 2 A y b 2 B; también se dice que A y B son subespacios suplementarios. 3 3.1 Espacios normados Si en un espacio vectorial E sobre K (R o C) se define una norma vectorial como k k W E ! R que verifica 3.1 Espacios normados kvk D 0 H) v D 0 y x ¤ 0 H) kxk > 0; k˛vk D j˛jkvk para ˛ 2 K y v 2 E; Si en un espacio vectorial E sobre K (R o C) se define una norma vectorial como una aplicación k k W E ! R que ku C vk kuk C kvk 8u; v 2 E; verifica kvk D 0 H) v D 0 y x ¤ 0 H) kxk > 0; se dice que E es un espacio vectorial normado. k˛vk D j˛jkvkLa condición para ˛ 2 kuCvk K y v 2 kukCkvk E; es la desigualdad de Minkowski; se conoce tambi del triángulo. Es una generalización del hecho de que un lado de un triángulo no puede ku C vk lakuk kvk 8u; vdos: 2 E; sumaCde los otros ver figura. Una variante de esta regla es la siguiente: se dice que E es un espacio vectorial normado. ku vk kuk kvk: La condición ku C vk kuk C kvk es la desigualdad de Minkowski; se conoce también como regla del triángulo. Es una generalización del hecho de que un lado de un triángulo no puede ser mayor que la suma de los otros dos: ver figura 3.1. Una variante de esta regla es la siguiente: ku vk kuk kvk. v uCv u Figura 3.1: Representación gráfica de la regla del triángulo Figura 3.1: Representación gráfica de la regla del triángulo En el espacio vectorial Kn , para 1 p < 1, se tiene la familia de normas En el espacio vectorial Kn , para 1 p < 1, se tiene la familia de normas 1=p p p p p p p kxk D jx j C C jx j ; p 1 n kxkp D jx1 j C C jxn j denominadas normas p de Hölder. Casos particulares lo constituyen las correspondientes a pparticulares D 1 y p Dlo2:constituyen las correspondien denominadas normas p de Hölder. Casos p Dn2: X n kxk1 D jxi j X jxi j kxk1 D i D1 p i D1 2 2 jx1 j C C jxn j : kxk2 D p kxk2 D jx1 j2 C C jxn j2 : Esta última se denomina en Rn norma euclídea. También en Kn es una norma la ndada por Esta última se denomina en R norma euclídea. También en Kn es una norma la dada kxk1 D mKax jxi j : kxk1 D mKax jxi j : 1in 1in Estas normas cumplen, cualquiera que sea x 2 Kn , que Estas normas cumplen, cualquiera que sea x 2 Kn , que kxk1 kxk2 kxk1 nkxk1 : kxk1 kxk2 kxk1 nkxk1 : 2 2 espacios vectoriales normados Si la bola cerrada unidad en R2 es el conjunto fx 2SiRla Wbola kxkcerrada 1g, sus formas unidad en Ren es el conjunto fx 2 R2 W kxk por 1g, sus formas pa la 1, 2, 1 y p son las que representa la figura 3.2. vectoriales 1, 2, 1, y p son las que representa la figura 3.2. En el espacio C Œ0; 1 de funciones continuas del intervalo Œ0; 1 en C, son normas las dadas por 7 "Z #1=p 1 kf kp D 0 jf .t /jp dt y por kf k1 D mKax jf .t /j : t 2Œ0;1 En un espacio vectorial normado se define la distancia entre dos elementos u y v mediante d.u; v/ D ku vk : Esta definición convierte a cualquier espacio vectorial normado en un espacio métrico. Sea E un espacio vectorial normado; se dice que una sucesión1 fx .n/ g en E converge a un límite v 2 E, si para todo " > 0, existe un N 2 N tal que a partir de él, n N , se cumple que kx .n/ vk < ". 1 Cuando así lo aconseja la dificultad de la notación, una sucesión también se designa por fxn g; sus integrantes, x .k/ . 4 – Si el conjunto fx 2 R2 W kxk 1g es la bola cerrada unidad en R2, su forma para las normas vectoriales 1, 2, 1, y p son estas. x11 D = kxk 2 i 2 i=1 |xijx | ij iD1 D1 √ q q 2 2 x22 D = jx |x11|j22+C|xjx 2 | 2= kxk j DxT xx T x D 1 x1 max kxk D1≤i≤2 mKax|xjx ∞ = i| i j D 1 1i2 1/p p p 1=p xpp D = Œjx |x11|jpp+C|xjx p < p∞) kxk < 1/ 2 | 2 j , (1 ;≤.1 D1 28/63 Figura 3.2: Forma de la bola unidad para diferentes normas en R2 a b c d e f i j 1 2 3 9 4 6 10 8 7 g 5 Cuando una sucesión fx g admite un vector límite v sólo tiene ese vector como límite.2 Se escribe lKımn!1 x .n/ D v. Es equivalente decir que lKımn!1 x .n/ D v y que lKımn!1 kx .n/ vk D 0. En particular, x .n/ ! 0 si y sólo si kx .n/ k ! 0. h .n/ Una sucesión fx .n/ g en un espacio vectorial normado por k k se denomina sucesión de Cauchy si para cada " > 0 existe un n 2 N tal que cualesquiera que sean p; q n, se cumple que kx .p/ x .q/ k < ". Toda sucesión convergente es una sucesión de Cauchy pero pueden existir espacios normados con sucesiones de Cauchy que no son convergentes. Un espacio vectorial normado se dice completo si toda sucesión de Cauchy en él tiene límite. Un espacio de Banach es un espacio vectorial completo respecto de la norma a él asociada. Todo espacio vectorial normado de dimensión finita es un espacio de Banach. En un espacio de dimensión infinita esto no es cierto; por ejemplo, es fácil ver que en C Œ0; 1 la sucesión de funciones cuyas gráficas son las de la figura 3.3 es una sucesión de Cauchy para cualquier norma k kp , pero no tiene límite en C Œ0; 1. 1 n fn .x/ 6 = = 0 1 x = 1 n = Figura 3.3: Gráfica de una de las funciones de una sucesión de Cauchy 3.2 Espacios con producto interior Sea E un espacio vectorial sobre un cuerpo K (R o C); una forma sesquilineal —vez y media lineal— sobre E es una aplicación hji W E E ! K que verifica3 : 1) h˛u C ˇvjwi D ˛hujwi C ˇhvjwi y 2) huj˛v C ˇwi D ˛hujvi C ˇhujwi; 2 Si 3 La existe límite es único. barra designa complejo conjugado. 5 cualesquiera que sean u, v, w en E y ˛; ˇ en K. Si además se cumple que hujvi D hvjui ; la forma se denomina hermítica. Es claro que hujui es siempre un número real. Cuando se cumple que u ¤ 0 H) hujui > 0 ; se dice que la forma es definida positiva, denominándosela también producto escalar. Una forma sesquilineal sobre R es siempre bilineal. Un espacio prehilbertiano es un espacio vectorial sobre K dotado de una forma hermítica definida positiva. Todo espacio prehilbertiano es un espacio normado mediante p kvk D hvjvi : En la demostración de que esta definición corresponde a la de una norma en E juega un papel importante la desigualdad de Cauchy-Schwarz: a saber, ˇ ˇ ˇ ˇ ˇhujviˇ kuk kvk : Un espacio de Hilbert es un espacio prehilbertiano completo respecto de la norma que deriva del producto escalar p k k D h; i . Dicho de otra forma, un espacio prehilbertiano que con esta norma da un espacio de Banach. El espacio euclídeo n-dimensional, expresado Rn o En , es un espacio de Hilbert de dimensión finita. Dos vectores cuyo producto escalar es cero se denominan ortogonales; si sus k k2 son la unidad se denominan ortonormales. Para dos vectores ortogonales se tiene la identidad ku C vk2 D kuk2 C kvk2 ; que es una generalización del teorema de Pitágoras. En un espacio prehilbertiano el único vector ortogonal a todos los vectores del espacio es el vector nulo; si este espacio es de dimensión finita es posible construir una base ortonormalizada. En un espacio euclídeo n-dimensional el ángulo entre dos vectores x e y es T x y ; D arc cos kxkkyk donde D cumple que 1 1, para cualesquiera x e y. xT y kxkkyk Dos vectores son ortogonales si x T y D 0 ( D =2; D 0); alineados, si x T y D kxkkyk ( D 0; D 1); opuestos, si x T y D kxkkyk ( D ; D 1). Forman un ángulo agudo si x T y > 0 ( < =2; > 0) y un ángulo obtuso si x T y < 0 ( > =2; < 0). Una familia cualquiera de vectores distintos del nulo y ortogonales dos a dos es una familia libre. Si M es un subespacio de un espacio prehilbertiano E de dimensión finita, el subespacio ortogonal de M , M ? , es el subespacio formado por todos los vectores ortogonales a los de M , siendo un subespacio suplementario de M ; es decir M ˚ M ? D E. Cualquier x 2 E, por consiguiente, se puede expresar como x D a C b, con a 2 M y b 2 M ? . 3.3 Aplicaciones lineales Dados dos espacios vectoriales E y F sobre el mismo cuerpo K se define una aplicación lineal, transformación lineal, mapeo, operador lineal u homomorfismo, f , de E en F , como una aplicación f W E ! F que verifica f .x C y/ D f .x/ C f .y/ ; cualesquiera que sean los vectores x, y de E y los escalares y . Existen dos casos particulares interesantes: el primero cuando E D F , en este caso se dice que f es un operador lineal de E o endomorfismo de E; el segundo cuando F D K —el cuerpo base—, en cuyo caso la aplicación se denomina forma lineal sobre E. El conjunto L.E; F / de todas las aplicaciones lineales del espacio E en el espacio F se estructura como un espacio vectorial si se definen las siguientes operaciones: a) adición .f C g/ W b) producto por un escalar f W .f C g/.x/ D f .x/ C g.x/ .f /.x/ D f .x/ 6 8x 2 EI 8x 2 E y 8 2 K: En particular, el conjunto L.E; K/ de formas lineales es un espacio vectorial denominado dual de E, representándose con E . Para una aplicación lineal f W E ! F , el conjunto de vectores de F que son la imagen de los de un subespacio de E forma un subespacio de F . En particular, la imagen de todo E es un subespacio de F que se denomina subespacio imagen de f , representándose mediante Im.f /. Análogamente, el conjunto anti-imagen de un subespacio de F forma un subespacio de E. En particular, la anti-imagen del subespacio nulo de F forma lo que se denomina el núcleo de la aplicación, representándose por ker.f /. Así pues ker.f / D fx 2 E W f .x/ D 0g : Si b 2 F , la ecuación lineal f .x/ D b tiene solución si y sólo si b 2 Im.f /. En ese caso el conjunto de todas las soluciones es la variedad lineal —traslación de un subespacio— dada por x0 C ker.f /, donde x0 es una solución particular de la ecuación. En particular, la aplicación es inyectiva si y sólo si ker.f / D ;. Sean E y F dos espacios prehilbertianos sobre el cuerpo K; si f W E ! F es una aplicación lineal, la aplicación traspuesta de f es la aplicación f W F ! E que cumple hxjf .y/i D hf .x/jyi ; cualesquiera que sean los vectores x 2 E e y 2 F . Particularmente importante es el caso en que E D F : f se dice entonces que es el operador adjunto de f . Cuando un operador f de E cumple que f D f se denomina operador autoadjunto. En el caso de que E sea un espacio vectorial real, también se dice que f es un operador simétrico y cuando es un espacio vectorial complejo, que f es un operador hermítico. Un operador simétrico cumple que hxjf .y/i D hf .x/jyi; mientras que uno hermítico, que hxjf .y/i D hf .x/jyi: Un operador f de E es unitario cuando es invertible y su inverso coincide con su adjunto. Es decir, si f D f Para un operador unitario se tiene que 1 . hf .x/jf .y/i D hf .f .x//jyi D hxjyi ; de manera que kf .x/k D kxk. Por este motivo a los operadores unitarios también se les denomina operadores isométricos. Dada una transformación lineal, aplicación lineal, o mapeo, f W E ! E, se dice que un subespacio W de E es un subespacio invariante frente a f (o f -invariante) si para todo vector w 2 W se cumple que f .w/ 2 W . Dicho de otra manera, W es un subespacio invariante si f .W / W . 4 Matrices Sean dos espacios vectoriales E y F de dimensiones finitas n y m sobre el mismo cuerpo K. Una aplicación lineal g W E ! F , g 2 L.E; F /, está caracterizada o representada en dos bases fe1 ; e2 ; : : : ; en g de E y ff1 ; f2 ; : : : ; fm g de F por una tabla de coeficientes, matriz asociada, de m filas y n columnas: 2 3 a11 a1n 6 : : 7 : : : ::: 7 2 K mn : AD6 4 : 5 am1 amn Los coeficientes aij están definidos por g.ej / D El vector columna j -ésimo m X 1 j n: aij fi ; i D1 2 6 6 6 4 a1j a2j :: : amj 7 3 7 7 7 5 representa el vector g.ej / en la base .fi /. A partir de la matriz A se pueden calcular los coeficientes y1 ; y2 ; : : : ; ym del vector y D g.x/ en la base .fi /, conociendo los coeficiente x1 ; x2 ; : : : ; xn en la base .ej /. En efecto: 2 3 2 3 3 2 2 3 a11 y1 a12 a1n 6 a 7 6 a 7 6y 7 6 a 7 6 22 7 6 2n 7 6 21 7 6 27 6 :: 7 D x1 6 :: 7 C x2 6 :: 7 C C xn 6 :: 7 : 4 : 5 4 : 5 4 : 5 4 : 5 am2 amn am1 ym Expresión que también se puede escribir de la siguiente forma: yD n X xi ai ; i D1 donde ai es el vector columna i-ésimo de la matriz A. Así pues, si se fijan dos bases en E y F , cada aplicación lineal, g W E ! F , queda unívocamente representada por una matriz. Recíprocamente, toda matriz en K mn define unívocamente una aplicación lineal entre dos espacios E y F de dimensiones n y m en los que se han fijado dos bases. En particular, se pueden identificar las matrices m n con las aplicaciones lineales de K n en K m . Las matrices de m filas y n columnas con coeficientes en el cuerpo K forman un espacio vectorial, K mn , sobre dicho cuerpo K. Si E y F son dos espacios de dimensión finita dotados de un producto escalar y la aplicación ˛ 2 L.E; F / se representa en dos bases ortonormalizadas mediante una matriz A, la aplicación ˛ T 2 L.F; E/, traspuesta de ˛, viene representada por la matriz A T , traspuesta de A. El núcleo y la imagen de una matriz A 2 K mn , ker.A/ y Im.A/, respectivamente, se definen como los subespacios de K n y K m que son el núcleo y la imagen de la aplicación lineal asociada: 7 7 ker.A/ D fx 2 K n W Ax D 0g 7 5 : Im.A/ D fy 2 K m W y D Ax; x 2 K n g mn A2K Dicho de otra forma, la imagen de una matriz es el subespacio generado por los vectores columna de la matriz; los vectores fila también generan un subespacio que no es otro que la imagen de A T . Para una matriz A 2 Rmn se cumple que: ker A T D .Im.A//? Im A T D .ker.A//? ? ker.A/ D Im A T ? : Im.A/ D ker A T El Teorema fundamental del algebra lineal establece que si A 2 Rmn se cumple que ker .A/ ˚ Im A T D Rn : El rango de una matriz es la dimensión4 de su subespacio imagen: rango.A/ D dim.Im.A// Una matriz A 2 K se dice de rango completo si rango.A/ D mKın.m; n/. Una matriz cuadrada A 2 K nn se denomina singular si rango.A/ < n; regular si rango.A/ D n. También se cumple que rango.A/ D rango.A T /. mn La aplicación asociada a una matriz A 2 Rmn es suprayectiva si rango.A/ D m. Para una matriz A 2 K mn se cumple que dim.ker.A// C rango.A/ D n ; o, alternativamente, dim.ker.A// D n rango.A/. La aplicación lineal asociada a A es, por tanto, inyectiva, si y sólo si rango.A/ D n. Por otro lado dim.ker.A T // C rango.A T / D m. El producto exterior uvT de un vector columna n 1 por un vector fila 1 n es una matriz A nn de rango 1. 2 3 u1 v1 u1 v2 u1 vn 6 u v u v u v 7 2 n7 6 2 1 2 2 A D uvT D 6 : :: 7 4 :: : 5 un v1 un v2 un vn 4 Recordemos: máximo número de vectores linealmente independientes. 8 4.1 Normas de matrices Aun cuando en lo que sigue nos limitaremos a matrices cuadradas, la mayor parte de las definiciones y resultados son extensibles a matrices rectangulares; también supondremos que las matrices son reales. Las matrices cuadradas de orden n forman un espacio vectorial con un producto, esto es, un álgebra. Una norma matricial es una norma vectorial compatible con el producto. Se define formalmente sobre Rmn como una aplicación k k W Rmn ! R que cumple: 1) kAk D 0 H) A D 0: 2) kAk D jj kAk: 3) kA C Bk kAk C kBk: 4) kABk kAk kBk: Existen normas sobre el espacio Rmn que no son normas matriciales pues no cumplen la propiedad 4). Así, si se define kAk D mKax jaij j ; 1i;j n se satisfacen 1), 2) y 3); sin embargo, tomando A D B D que no se cumple 4). h 11 11 i , es fácil ver que kABk D 2 > kAk kBk D 1, por lo Un ejemplo importante de norma matricial es la norma de Frobenius, definida como: X 2 kAk2F D aij D traza.A T A/; 1i;j n P donde la traza de una matriz A de orden n es niD1 ai i . Es fácil ver que esta norma deriva del producto escalar hAjBi D traza.A T B/, que configura al espacio de las matrices cuadradas como un espacio prehilbertiano. La norma de Frobenius cumple que kABkF kAkF kBkF : Una norma matricial k k sobre Rmn se dice consistente con una norma vectorial k k0 sobre Rn cuando para cada matriz A y cada vector x se cumple que kAxk0 kAk kxk0 : Por ejemplo, la norma de Frobenius y la norma euclídea de Rn son consistentes pues kAxk2 kAkF kxk2 : Se demuestra que para toda norma matricial es posible construir una norma vectorial consistente. Recíprocamente, a toda norma vectorial sobre Rn se le puede asociar una norma matricial consistente. Una norma matricial consistente con una cierta norma vectorial k k se construye mediante la definición kAk D sup 0¤x2Rn kAxk : kxk Esta norma matricial se dice inducida por la norma vectorial. Ejemplo: la norma matricial inducida por la norma euclídea de Rn es la norma espectral: kAk2 D sup 0¤x2Rn " x T A T Ax xT x #1=2 D q max .A T A/ D max .A/; donde designa un valor propio de A y un valor singular. Si k k es la norma inducida por una cierta norma vectorial y k k0 es una norma matricial cualquiera consistente con esa norma vectorial, se cumple, para toda matriz A, que kAk kAk0 . En particular, para la norma espectral y la norma de Frobenius, se cumple que p kAk2 kAkF nkAk2 : También, que kABkF kAkF kBk2 y kABkF kAk2 kBkF 2. Como casos particulares, kIk2 D 1 y kDk2 D mKaxi jdi j. 9 Las normas matriciales inducidas más usadas son kAk1 D kAk1 D mKax 1j n mKax 1im m X i D1 n X j D1 jaij j y jaij j : Ejemplo 4.1 El efecto que produce aplicar la transformación lineal basada en la matriz " # 12 AD 02 sobre la bola unidad definida a partir de las normas k k1 , k k2 y k k1 en R2 , se representa en la figura 4.4. La aplicación [2, 2]T [0, 1]T A1 = 4 [1, 0]T norma11 norma [1, 0]T A2 ≈ 2,9208 norma22 norma A∞ = 3 norma1 ∞ norma – LaFigura aplicación transforma el vector e 1 D Œ1; 0T en sí mismo y 4.4: Efecto de una aplicación lineal sobre la bola unidad para diferentes normas e 2 D Œ0; 1T en Œ2; 2T . 39/63 transforma el vector e1 D Œ1; 0T en sí mismo y e2 D Œ0; 1T en Œ2; 2T . Con la norma 1, el vector unitario que más se amplifica al aplicarle la transformación es Œ0; 1T (o Œ0; 1T ), que pasa a ser Œ2; 2T . Su factor de amplificación, en términos de la norma 1, es 4. a b c 1 2 3 h i j 10 8 7 Con la norma 2, el vector unitario que más se amplifica es el que se representa en la figura con una recta discontinua. g e f 9 4 6 5 d El factor de amplificación es 2,9208. Para la norma 1, igualmente, el vector unitario que más se amplifica es el que se representa también con la recta discontinua: Œ1; 1T , que pasa a transformarse en Œ3; 2T . El factor de amplificación correspondiente es en este caso 3 ya que Œ1; 1T D 1 1 u Œ3; 2T D 3: 1 4.2 Matrices ortogonales, unitarias, simétricas, Hessenberg, de permutación y de proyección Una matriz Q 2 Rmn se dice ortogonal si verifica que QT Q D I; es decir, cuando sus vectores columna son ortogonales dos a dos y de norma euclídea unitaria (ortonormales). Si Q 2 Rnn es ortogonal, se cumple que QQT D QT Q D I. 10 Las matrices ortogonales Q 2 Rmn verifican: y kQk2 kQkF kQAk2 kQAkF D1 D n1=2 D kAk2 D kAkF kQk2 kQkF kAQk2 kAQkF D D D D 1 m1=2 kAk2 kAkF 9 > > > = > > > ; si m n > > > ; si m n 9 > > > = Una matriz ortogonal no modifica ni los ángulos ni las normas, .Qx/H .Qy/ D x H QH Qy D x H y. Si y D x, jjQxjj2 D jjxjj2 . La extensión de las matrices ortogonales al campo complejo son las matrices unitarias. Son matrices, U 2 C nn , cuya inversa es su compleja conjugada: U H U D U U H D I: Todos los valores propios de las matrices unitarias tienen módulo unidad. Como las ortogonales, una matriz unitaria no modifica ni los ángulos ni las normas, .U x/H .U y/ D x H U H U y D x H y. Si y D x, jjU xjj2 D jjxjj2 . Una matriz de permutación es una matriz cuadrada cuyas columnas están formadas por las de la matriz unidad permutadas. Una matriz de permutación es una matriz ortogonal. Una matriz se dice simétrica si se verifica que A D A T . Para una matriz cualquiera A 2 Rmn , la matriz A T A es simétrica. Si A 2 C nn es igual a su traspuesta conjugada, A D B D A H , bij D aNj i , se dice hermítica. Una matriz A se dice definida positiva si x T Ax > 0 para todo vector x ¤ 0. De forma similar se definen matrices semidefinida positiva, definida negativa y semidefinida negativa, si x T Ax 0, < 0 y 0, respectivamente, para todo vector x ¤ 0. La matriz A se dice indefinida si x T Ax es positivo para algún x y negativo para otros. También A 2 C nn se dice definida positiva si para todo x 2 C n ; x ¤ 0, se cumple que x H Ax > 0. Si A 2 Rnn es simétrica y definida positiva se puede descomponer de la formaA D QDQT donde Q es una 1 1 matriz ortogonal y D, diagonal, tiene todos sus coeficientes positivos por lo que A 2 D QD 2 QT satisfaciéndose que 1 1 A 2 A 2 D A. Una matriz de Hessenberg es una matriz triangular excepto por una subdiagonal adyacente a la diagonal principal. @ @ @ 0 @ @ Cualquier matriz se puede reducir a la forma de Hessenberg mediante transformaciones ortogonales de Householder o Givens. Si la matriz original es simétrica, al reducirla a la forma de Hessenberg se obtendrá una tridiagonal. Se denomina proyector o matriz de proyección a una matriz P 2 Rnn que verifica que P 2 D P. Si P además es simétrica, se denomina proyector ortogonal o matriz de proyección ortogonal. Si, en este último caso, F es el subespacio imagen de la matriz P (el mismo que el de la matriz P T ), Px define la proyección ortogonal del vector x sobre F . Se denomina proyector suplementario de P al proyector S D I F D ker.S / y G D Im.S /. P. Si F D Im.P/ y G D ker.P/, entonces En el caso de un proyector ortogonal P en el que F D Im.P/, se tiene que Rn D F ˚ F ? , verificándose que kPxk2 kxk2 y que kx Pxk2 D mKın kx yk2 : y2Im.P /DF 5 Valores propios, valores singulares y formas cuadráticas 5.1 Valores propios Si A es una matriz cuadrada de orden n y coeficientes en K (R o C), un vector no nulo u 2 Kn se denomina vector propio de A si para algún 2 K se cumple que Au D u : 11 A este se le denomina valor propio o autovalor de la matriz A. El conjunto de los valores propios de una matriz A se denomina espectro de A, designándose por ƒ.A/. El radio espectral, .A/, se define de la siguiente manera: .A/ D mKax ji j: 1in Para que un número sea valor propio de A, el sistema lineal y homogéneo de ecuaciones dado por .I debe tener soluciones distintas de la trivial x D 0. Esto equivale a que det.A A/x D 0 I/ D 0 : Esta es una ecuación polinómica de grado n en que se denomina ecuación característica, o polinomio característico, de la matriz A. La ecuación característica admite la raíz D 0 si y sólo si det.A/ D 0. Una matriz es invertible, por tanto, si y sólo si no admite al cero como vector propio. Para que exista una solución distinta de la trivial x D 0, el valor propio deberá ser raíz del polinomio característico de grado n asociado a A, esto es det.A I/ D 0. Lo que es igual a n C g1 n 1 C g2 n 2 C C gn D 0: La multiplicidad algebraica del valor propio de A es la multiplicidad de la raíz correspondiente del polinomio característico asociado a A. La multiplicidad geométrica de es el número de vectores propios linealmente independientes que se corresponden con . La multiplicidad geométrica de un valor propio es menor o igual que su multiplicidad algebraica. Por ejemplo, si A D I, D 1 es un valor propio con multiplicidad algebraica y geométrica n. El polinomio característico de A es p.z/ D .z 1/n y ei 2 C n , i D 1; : : : ; n, sus vectores propios. Si el valor propio tiene una multiplicidad geométrica menor que la algebraica, se dice defectuoso. Se dice que una matriz es defectuosa si tiene al menos un valor propio defectuoso. La matriz 2 3 210 40 2 15 002 tiene un valor propio, 2, de multiplicidad algebraica 3 y multiplicidad geométrica 1; u D Œ100T . Si una matriz A 2 C nn no es defectuosa, dispone de un conjunto de n vectores propios linealmente independientes. Un resultado interesante debido a dos matemáticos del siglo XIX, Cayley, británico y Hamilton, irlandés, dice que cualquier matriz A 2 C nn satisface su propia ecuación característica. Es decir, A n C g1 A n 1 C g2 A n 2 C C gn I D 0: Si A es invertible, como consecuencia de ello, A 1 D 1 n A gn g1 n A gn 1 2 gn 1 I: gn A partir del teorema de Cayley-Hamilton también es fácil comprobar que existe un polinomio p de grado máximo n tal que A 1 D p.A/. Como ejemplo, la matriz 12 34 1 tiene como polinomio característico x 2 5x 2. El teorema de Cayley-Hamilton dice que A 2 5A 2I D 0, lo cual se puede comprobar inmediatamente. La inversa de A se puede obtener de esta ecuación a partir de A .A 5I/ D 2I. En efecto, A 1 D 21 .A 5I/. Para A 2 C nn y 0 ¤ b 2 C n1 , al subespacio Kj .A; b/ D engfb Ab : : : A j Krylov. 1 bg se le denomina subespacio de Igual que cualquier matriz tiene asociado un polinomio característico, cualquier polinomio tiene asociado una matriz compañera. La matriz compañera de un polinomio mónico5 p.t / D c0 C c1 t C C cn 1 t n 1 C t n es 2 0 61 6 C .p/ D 6 6 0: 4 :: 0 0 1 :: : ::: ::: ::: :: : 0 0 ::: 0 0 0 :: : 1 3 c0 c1 c2 :: : cn 1 7 7 7 7 5 El polinomio mínimo q.t / de la matriz A es el polinomio mónico único de grado mínimo tal que q.A/ D 0. 5 Un polinomio a0 C a1 x C a2 x 2 C : : : C an x n se dice que es mónico si an D 1. 12 Una matriz real de orden n no tiene necesariamente valores propios reales pero, como consecuencia del teorema fundamental del álgebra, cualquier matriz compleja tiene al menos un valor propio complejo. El número máximo de valores propios es n. Al aplicársele a cualquier vector la transformación que representa A ese vector tiende a orientarse hacia la dirección del vector propio dominante de A. Si aquel vector está en la dirección de alguno de los vectores propios de A, se expande o contrae por un factor que determina el correspondiente valor propio. Por ejemplo, la matriz 21 12 tiene como valores propios 3 y 1. Los vectores propios asociados son Œ1 1T y Œ 1 1T . El efecto de aplicarla sobre distintos vectores se puede ver en la figura (en magenta y azul los vectores propios; otros en rojo). Siendo un valor propio de la matriz A, el conjunto de soluciones del sistema de ecuaciones .I A/x D 0 es un subespacio de Kn que se denomina subespacio propio asociado al valor propio , designándose con E . Si n es la multiplicidad de como raíz de la ecuación característica de A, se cumple que dim.E / n : La intersección de subespacios propios correspondientes a valores propios distintos se reduce al subespacio nulo; esto es, ¤ H) E \ E D ; : De este modo, la suma de subespacios propios es directa. Se cumple que M E D Kn 2ƒ.A/ si y sólo si para cada 2 ƒ.A/, dim.E / D n ; en ese caso existe una base de Kn formada toda ella por vectores propios de A. El teorema central en el estudio de los métodos y algoritmos numéricos para el cálculo y análisis de valores y vectores propios es el de la descomposición de Schur. Teorema 5.1 Descomposición o triangularización de Schur. Para cualquier A 2 C nn existe una matriz unitaria U y una matriz triangular superior, T , tal que AU D U T o U H AU D T . Los valores propios de A son entonces los coeficientes de la diagonal principal de R. Teorema 5.2 Para cualquier matriz hermítica A 2 C nn existe una matriz unitaria U tal que U H AU D D, donde D es una matriz diagonal. 1. Los valores propios de A son números reales. 2. Se pueden obtener vectores propios de A que sean ortonormales. 13 En este caso se dice que la matriz A es semejante a una matriz diagonal: la matriz A es diagonalizable por semejanza. Una matriz A 2 C nn es normal, es decir AA H D A H A, si y sólo si A D U ƒU H , donde U es una matriz unitaria y ƒ una diagonal cuyos coeficientes son los valores propios de A. Los vectores propios son los vectores columna de U . Toda matriz real y simétrica tiene todos sus valores propios reales y es diagonalizable por semejanza. Se demuestra además que los subespacios propios correspondientes a valores propios distintos son ortogonales. De aquí se sigue que es siempre posible formar una base ortonormalizada de vectores propios para una matriz real y simétrica A. Existe entonces una matriz ortogonal Q tal que se verifica que QT AQ D D; con QT D Q 1 ; y, de aquí que, toda matriz real y simétrica es congruente ortogonal con su reducida diagonal. Este resultado fundamental de la teoría de matrices es la versión elemental del denominado teorema espectral. Si A es hermítica, el producto x H Ax es un número real. Los valores propios de una matriz hermítica, en consecuencia, son números reales. En una matriz hermítica los vectores propios correspondientes a dos valores propios distintos son ortogonales entre sí. Teorema 5.3 Descomposición de Jordan Para una matriz A 2 C nn existe una matriz regular X 2 C nn tal que X 1 AX D diag.J 1 ; : : : ; J k / donde 2 3 i 1 6 1 0 7 i 6 7 ni ni Ji D 6 7 6 72C 4 0 5 1 i y n1 C nk D n. Las J i son las matrices o bloques de Jordan y los i los valores propios de A. 5.2 Valores singulares La noción de valor propio, o autovalor, no tiene significado para matrices rectangulares. En éstas, por el contrario, se introduce el concepto de valor singular. Si A es una matriz rectangular m n con coeficientes en R, se definen sus valores singulares i ; i D 1; : : : ; mKınfm; ng, como las raíces cuadradas positivas de los valores propios de la matriz cuadrada A TA 2 Rnn . Se demuestra que si A 2 Rmn , existen dos matrices ortogonales, U D Œu1 ; : : : ; um 2 Rmm y V D Œv1 ; : : : ; vn 2 Rnn ; tales que y donde U T AV D diag.1 ; : : : ; p /; p D mKınfm; ng ; 1 2 p 0 : Los vectores ui se denominan vectores singulares izquierdos; los vi , vectores singulares derechos. Los valores singulares de A son las longitudes de los semiejes del hiperelipsoide E definido por E D fy W y D Ax; kxk2 D 1g : Es decir, las longitudes de los semiejes del hiperelipsoide imagen de la esfera unidad resultante de la aplicación que caracteriza la matriz A. En la figura ?? se describe gráficamente el caso en que m D n D 2. Para una matriz A 2 Rmn cuya descomposición en valores singulares es A D U †V T , se define su matriz pseudoinversa, A , como A D V †U T ; donde † D diag.1 1 ; : : : ; r 1 ; 0; : : : ; 0/ 2 Rnm : 14 σ1 σ2 x Ax Ax Figura 5.5: Representación en dos dimensiones de una transformación lineal de la esfera unidad Si A 2 Rmn es de rango completo y m > n, A D AT A si m < n 1 A D A T AA T AT I 1 : Para cualquier matriz A 2 Rmn , la matriz A A es la matriz n n de proyección ortogonal sobre el subespacio de los vectores fila de A, AA la m m de proyección ortogonal sobre la imagen de la matriz A (subespacio de sus vectores columna) y .I A A/ la de proyección ortogonal sobre el núcleo de A, ker.A/. 5.3 Formas cuadráticas Una forma cuadrática en n variables es un polinomio de segundo grado en esas variables. La expresión más general de una forma cuadrática es q.x/ D x T Qx ; donde Q D QT es una matriz simétrica de orden n. Nos limitaremos al análisis de formas cuadráticas con coeficientes reales. Mediante una transformación lineal de variables, x D T y, una forma cuadrática se puede reducir a la forma canónica de suma de cuadrados siguiente: p pCq X X q.x/ D yi2 yi2 : i DpC1 iD1 El rango de la forma es p C q y la signatura p q (p números positivos y q negativos). Una forma cuadrática real es definida positiva si para todo vector x ¤ 0, q.x/ > 0. El rango y signatura de una forma cuadrática definida positiva valen n. Si Q la forman los coeficientes qij y se introducen los números menores como 2 3 q11 q12 q1i 6q q q 7 2i 7 6 21 22 i D det 6 :: :: : : :: 7 ; 4 : : : : 5 qi1 qi 2 qi i la forma cuadrática asociada a Q es definida positiva si y sólo si todos los menores i son positivos. Sean 1 ; : : : ; n los valores propios —que sabemos son reales— de la matriz Q; por el teorema espectral, existe una matriz ortogonal P tal que P T QP D diag.1 ; : : : ; n /: Haciendo en la forma cuadrática q.x/ D x T Qx el cambio de variables x D Py, se tiene que q.x/ D y T P T QPy D 1 y12 C C n yn2 ; lo que hace ver que el rango de la forma cuadrática es el número total —teniendo en cuenta las multiplicidades— de valores propios no nulos de Q, mientras que la signatura coincide con la diferencia entre los números de valores propios 15 positivos y negativos. En particular, la forma cuadrática asociada a Q es definida positiva si y sólo si todos los valores propios de Q son positivos. En ciertos casos es importante acotar el cociente de una forma cuadrática al cuadrado de la norma euclídea, es decir, el cociente x T Qx ; x ¤ 0: r.x/ D T x x Mediante una transformación ortogonal x D Py, este cociente se escribe como r.x/ D de manera que se deducen las acotaciones 1 y12 C C n yn2 ; y12 C C yn2 x T Qx max .Q/ : xT x Estas acotaciones no se pueden mejorar ya que si Qv D v, mi n .Q/ vT Qv D : vT v Como ya se ha visto, una matriz simétrica definida positiva tiene todos sus valores propios reales y positivos; si es semidefinida, alguno es cero. Si la matriz es negativa definida, todos sus valores propios son negativos. Un resultado muy interesante para averiguar el orden de magnitud de los valores propios de una matriz es el del teorema de Gerschgorin, que dice que si A 2 Rnn es una matriz simétrica con valores propios 1 ; 2 ; : : : ; n , entonces 9 8̂ > > ˆ n = < X jaij j ; mKın i mKın ai i > 1i n 1i n ˆ > j D1 ; :̂ j ¤i 9 8̂ > > ˆ n = < X jakj j : mKax i mKax akk C > 1kn 1kn ˆ > j D1 ; :̂ j ¤k Se dice que una matriz A 2 C nn , de coeficientes aij , es de diagonal dominante por filas cuando cumple que jai i j n X jaij j; n X jaj i j; j D1;j ¤i i D 1; : : : ; n: Análogamente, se dice diagonal dominante por columnas si jai i j j D1;j ¤i i D 1; : : : ; n: Si las desigualdades se verifican estrictamente la matriz A se denomina diagonal estrictamente dominante. Lema 5.4 Para que una matriz simétrica sea definida positiva es necesario que todos los coeficientes de la diagonal principal sean positivos. Lema 5.5 Para que una matriz simétrica A sea definida positiva es necesario que el coeficiente de mayor valor absoluto esté en la diagonal principal. Más concretamente, mKax jaij j < mKax akk : i ¤j k Lema 5.6 Si en cada fila de una matriz simétrica A el coeficiente de la diagonal principal es mayor que la suma de los valores absolutos de todos los demás coeficientes de la fila, es decir, si akk > n X j D1 jakj j k D 1; : : : ; n; j ¤k A es definida positiva. 16 Es importante destacar que este último criterio define una condición suficiente, no necesaria. En efecto, la matriz 2 3 322 Q D 42 3 25 223 es definida positiva pues la forma cuadrática q.x/ D x T Qx D x12 C x22 C x32 C 2.x1 C x2 C x3 /2 cualquiera que sea x ¤ 0, es siempre positiva: q.x/ > 0. Esta matriz, sin embargo, no satisface el lema ??. Además de las normas vectoriales y matriciales ya presentadas, otra norma vectorial que se utiliza en el curso es p p kxkA D A 1=2 x D hAxjxi D x T Ax; 2 6 denominada norma A o norma de energía del vector x, para una matriz A simétrica y definida positiva. A hxjyiA D hAxjyi se le denomina producto interior de A o producto escalar de energía. La matriz A 1=2 es la única matriz definida positiva solución de la ecuación matricial X 2 D X X D A. 6 Topología En un espacio vectorial normado se define una bola abierta, S.x0 ; r/, de centro x0 y radio r, como el conjunto de puntos x que verifican kx x0 k < r. Es decir: S.x0 ; r/ D fx 2 Rn W kx x0 k < rg: Una bola cerrada, SN .x0 ; r/, se define, por el contrario, como el conjunto de puntos x que verifican kx decir: SN .x0 ; r/ D fx 2 Rn W kx x0 k rg: x0 k r. Es Consideraremos en lo que sigue de este apartado un subconjunto S del espacio vectorial métrico hasta ahora estudiado (puede ser, por ejemplo, Rn ). Un punto y 2 S es un punto interior del conjunto S si existe un " tal que kx yk < " ) x 2 S : En otras palabras, existe una bola abierta S.y; "/ de centro y y radio " contenida íntegramente en S . El conjunto de todos los puntos interiores del conjunto S se denomina interior de S . Este conjunto puede, evidentemente, ser vacío. Ejemplo: un plano del espacio R3 . Un subconjunto de S se dice abierto si coincide con su interior; es decir, si alrededor de todo punto de S existe una bola abierta contenida íntegramente en S . Dos ejemplos: la bola abierta unidad, S.x; 1/ D fx W kxk < 1g y el espacio Rn en su totalidad. En general los subconjuntos o conjuntos abiertos se caracterizan por no tener límites definidos o ser disjuntos de su frontera (ver más adelante la definición del concepto frontera). Un entorno de un punto x, E.x/, es un conjunto abierto que contiene a x. En otras palabras, E.x/ es un entorno de x si contiene una bola abierta de centro x. Se dice que un punto x es un punto de acumulación del subconjunto S si en todo entorno de x existen un número infinito de puntos de S . Un punto x se denomina punto de adherencia del subconjunto S cuando todo entorno de dicho punto x contiene al menos un punto de S ; es decir, para todo " existe un y 2 S tal que kx yk < ". El conjunto de todos los puntos de adherencia se denomina adherencia —en la literatura anglosajona y latinoamericana, clausura cl.S /—. La adherencia de la bola abierta S.x; 1/ D fx W kxk < 1g es la cerrada SN .x; 1/ D fx W kxk 1g. Se denomina frontera de un conjunto a la parte de la adherencia que no está en el interior. Un conjunto, o subconjunto, se dice cerrado si coincide con su adherencia. La adherencia de cualquier conjunto S es el conjunto cerrado más pequeño que contiene a S . Se puede demostrar que un conjunto es cerrado si y sólo si toda sucesión convergente de elementos de S tiene un límite en ese conjunto. 6 Pues suele corresponder con la energía física de ciertos sistemas. 17 Un conjunto, o subconjunto, se dice compacto si es cerrado y acotado (contenido en una bola de radio r < 1). Un importante resultado, debido a Weierstrass, dice que si S es un conjunto compacto, de cada sucesión o sucesión infinita fx .n/ gn2N de elementos de dicho conjunto es posible extraer una subsucesión n o x .`/ LN `2L que converge a un elemento del propio conjunto S . Si fr .k/ g es una sucesión de números reales y s .k/ D sup fr .i / W i kg, entonces fs .k/ g converge a un número real s0 ; a este número se le denomina límite superior de fr .k/ g y se expresa como lKım sup r .k/ o lKım r .k/ : k!1 El límite superior de una sucesión de números reales es el mayor punto de acumulación de la sucesión. De forma similar se define el límite inferior. 7 Teorema de la proyección Gran parte de las teorías de sistemas de ecuaciones y de optimización que se estudian en la asignatura están basadas en unos pocos resultados simples e intuitivos. Entre estos, quizás el más sencillo y usado sea el teorema de la proyección. Su aplicación en la teoría de mínimos cuadrados lineales es fundamental. En un espacio Euclídeo ordinario de tres dimensiones determina que la distancia más corta de un punto exterior a un plano a ese plano la proporciona la perpendicular al plano desde dicho punto. La expresión formal de este teorema en espacios de Hilbert es la que sigue. Teorema 7.1 Sea H un espacio de Hilbert y M un subespacio cerrado de H . Para todo vector x 2 H existe un único vector m0 2 M tal que kx m0 k2 kx mk2 , para todo m 2 M . La condición necesaria y suficiente además para que m0 2 M sea el vector mínimo único es que x m0 sea ortogonal a M . D EMOSTRACIÓN . Primero probaremos que si m0 es un vector que minimiza kx mk, x m0 es ortogonal a M . Supongamos para ello, por el contrario, que existe un m que no es ortogonal a x m0 ; sin pérdida de generalidad podemos suponer que kmk D 1 y que hx m0 jmi D ı ¤ 0. Definamos el vector m1 2 M como m1 D m0 C ım. Tendremos que kx De esta manera, si x m1 k22 D kx m0 m0 k22 D kx ımk22 D kx jıj2 < kx m0 k22 m0 k22 : hx m0 jımi hımjx m0 i C jıj2 m0 no es ortogonal a M , m0 no es el mínimo que decíamos. Veamos ahora cómo, si x m0 es ortogonal al subespacio M , m0 es el único vector de M que minimiza kx En efecto, para todo m 2 M , el teorema de Pitágoras dice que mk22 D kx kx Por lo tanto kx m0 C m0 mk22 D kx m0 k22 C km0 mk2 . mk22 : m0 k2 para m ¤ m0 . mk2 > kx Demostraremos ahora la existencia de un m0 que minimiza kx mk2 . Si x 2 M , entonces m0 D x y todo estaría probado como es obvio. Si x … M , definamos un ı D Kınfm2M kx mk2 ; lo que queremos es obtener un m0 2 M tal que kx m0 k2 D ı. A tal fin, sea fm.i / g una sucesión de vectores en M tal que kx m.i / k2 ! ı. Por la ley del paralelogramo7 se tiene que 2 2 .j / 2 .m x/ C .x m.i / /2 C .m.j / x/ .x m.i / /2 D 2 m.j / x 2 C 2 C2 x m.i / : 2 Reordenando, se obtiene 7 Para u, w 2 M , .j / m ju C wj2 m D 2 m.j / C ju 2 .i / 2 wj2 D 2juj2 2 x C 2 x 2 C 2jwj2 . 18 2 .i / m 2 4 x 2 m.i / C m.j / : 2 2 Proposición 8.3 (Condiciones necesarias de segundo orden) Sea un subconjunto de Rn y una función f W ! R, f 2 C 2 . Si x en un mínimo relativo de f en , para toda dirección d 2 Rn , factible desde x , se cumple que: .j / .i / 2 .i / Como km.i / xk22 ! ı 2 cuando i ! 1,rf km.x m k2 ! 0 cuando i; j ! 1. Es decir, fm g es /d 0: .i / .j / Exercise .i / Cauchy; como es un subespacio cerrado, la sucesión fm g tiene m0 en de ı se Para todo i; j , el vector .muna sucesión C m de /=2 está en MM pues éste es un espacio vectorial (lineal). Deunlalímite definición rf .x D 0; entonces d T r 2 f .x /d 0: M.jy,/ /=2k debido a la continuidad de la norma,Sikx m0 k/d 2 ! ı. deduce que kx .m.i / C m 2 ı, por lo que 2del problema 2 la solución 6=2 0, y pone en evidencia given two n-vectors El de laxproyección que (Condiciones teorema .i / segundo2orden) Sea x un punto interior de y su4ı : 2 x mde m.i / 28.4 m.j / x Cnecesarias m.j / Proposición 2 2 póngase2que también unminimizar mínimo relativo de f 2W ! R, f 2 C . Entonces: ktx yk minimize (over t) t ktx − yk .j / j ! 1. Es decir, fm.i / g es una sucesión de Como km.i/ xk22 ! ı 2 cuando i ! 1, kmortogonal m.ide/ ky22 sobre ! 0x:cuando / D 0: es el vector proyección txrf en.x lai;figura. .i / Cauchy; como M es un subespacio cerrado, la sucesión fm g tienePara un límite m TenrM y,debido 2 todo f .x /d 0:xa la continuidad de la geometrically, tx is the projection of a vector y on thed; line0d through 0 and norma, kx m0 k2 ! ı. Proposición 8.5 (Condiciones suficientes de segundo orden) Sea f 2 C 2 una función definida en x interior. Supóngase además que: una región en la cual x es un punto tx .x / D 0: rf La matriz Hessiana r 2 f .x / es definida positiva: y x es entonces un mínimo relativo estricto de f . 0 9 Conjuntos convexos Figuraconvexos 7.6: Solución de minimizar t kt x 8 Conjuntos yk convexo y sólo para todo de puntos x1 ; x2 2 C todas las C laconvexo solución Rn sesi dice Unpone conjunto C conjunto Rn seque dice y del sólo si para si todo par desi puntos x1 ; xpar El teorema de la proyección en Un evidencia problema 2 2 C todas las Vectors 1-20están combinaciones la 1forma D x /x , conen 0 1, en C . Es decir, cuando para 1 C0.1 combinaciones de la forma x de D x C .1 x /x 1,2están C .Esdecir, cuando para 2 , con cada par puntosconvexo, del conjunto convexo, todos los puntos de laestán recta que los une están en el conjunto. cada par de puntos del de conjunto todos los puntos de la recta que los une en el conjunto. minimizar ktx yk t es el vector proyección ortogonal de y sobre x: t x en la figura ??. 8 Conjuntos convexos Conjunto convexo Conjunto no convexo Un conjunto C Rn se of diceconvex convexo si y sólo si para todo par de puntos x1 ;non-convex x2 2 C todas las combinaciones de la Examples La expresión x sets D x1 C .1 /x2Examples , 0 1, defineof la combinación convexa de sets x1 y x2 . Si • A segment isa convex set. forma x D x1 Cline .1 /x , con 0 1, están en C . Es cuando para cada par de puntos del conjunto convexo, •decir, The union of two non-overlapping line segmen 2 0 < < 1, es decir 2 .0; 1/, la combinación se denomina estrictamente convexa. • Non-convex sets can have “indentations. La expresión x D x1 C .1 /x2 , 0 1, define la combinación convexa de x1 y x” 2 . Si todos los puntos de la recta que los une están en el conjunto. El concepto de combinación convexa se puede generalizar a cualquier número finito de puntos de 0 < < 1, es decir 2 .0; 1/, la combinación se denomina estrictamente convexa. la siguiente manera: xD donde p X i D1 i D 1; p X i xi ; 25 i D1 i 0; i D 1; : : : ; p: Fig. 4.9. Convex sets with pairs of points joined by line segments. El conjunto intersección de todos los conjuntos convexos que contienen a un subconjunto S Rn Title Page Figura 8.7: Conjuntos convexos –izquierda–; no convexos –derecha– se llama envoltura convexa de S y se designa por conv.S/. 38 of 156 Title Page Go Back Full Screen Close 39 of 156 Quit 23 La expresión x D x1 C .1 /x2 , 0 1, define la combinación convexa de x1 y x2 . Si 0 < < 1, es decir 2 .0; 1/, la combinación se denomina estrictamente convexa. El concepto de combinación convexa se puede generalizar a cualquier número finito de puntos de la siguiente manera: xD donde p X iD1 i D 1; p X i xi ; iD1 i 0; i D 1; : : : ; p: El conjunto intersección de todos los conjuntos convexos que contienen a un subconjunto S Rn se llama envoltura convexa de S (figura ??) y se designa por conv.S /. Un conjunto C Rn se dice que es afín (también se dice que C es una variedad afín o una variedad lineal) si para cualesquiera x; y 2 C y cualquier 2 R se tiene que .1 /x C y 2 C . El conjunto vacío es afín. Un conjunto C Rn es afín si y sólo si es de la forma C D fa C l W a 2 Rn ; l 2 Lg, donde L es un subespacio vectorial de Rn asociado a C . Es decir, un conjunto afín es un subespacio desplazado del origen. La dimensión de un 19 Go Back Figure 2.2 Some simple convex and nonconvex sets. Left. The hexagon, 516 which Appendix Sets includesBitsConvex boundary (shown darker), is convex. Middle. The kidney shaped set is not convex, since the line segment between the two points in the set shown as dots is not contained in the set. Right. The square contains some boundary points but not others, and is not convex. x2 x2 x1 x1 convex nonconvex Fig. B.1 Convexity2 Figure 2.3 Theconjuntos convex hulls of2two R . Left.deThe of la a derecha de un conjunto Figura 8.8: Envoltura convexa de dos de R . Lasets de lainizquierda 15 convex puntos;hull la de set of fifteen points (shown as dots) is the pentagon (shown shaded). Right. no convexo The convex hull of the kidney shaped set in figure 2.2 is the shaded set. C+D conjunto afín x C L es la de su correspondiente subespacio L. Es evidente que cualquier conjunto afín es convexo aunque el recíproco no es cierto en general. D 2.C Roughly speaking, a set is convex if every point in the set can be seen by every other along de ansoluciones unobstructed path between lineales, them, where unobstructed Proposición 8.1 point, El conjunto de unstraight sistema de ecuaciones C D fx W Ax D b; A 2 Rmn ; b 2 C means lying in the set. Every affine set is also convex, since it contains the entire m R g, es un conjunto afín. line between any two distinct points inDit, and therefore also the line segment C C and nonconvex sets between the points. Figure 2.2 illustrates some simple convex 2 D EMOSTRACIÓN .inEnRefecto, supongamos que x ; x 2 C , es decir, Ax D b, Ax 1 2 1 2 D b. Entonces, para cualquier , . We of the form θ1 x1 + · · · + θk xk , where θ1 + · · · + θk = 1 and 0 call a point A . x1 C .1 combination /0 x2 / D of Ax Ax2 1 C .1 x ,/ θi ≥ 0, i = 1, . . . , k, a convex the points 1 . . . , xk . As with affine .1sets / D ofifb C only b contains every convex sets, it can be shown thatFig. a set convex and if it B.2 is Properties convex combination of its points. A convex combination of points can be thought of as a D b; mixture or weighted average of the points, with θi the fraction of xi in the mixture. n Definition. afín Let Sx1beCa.1 subset of2Eestá . The convexenhull of S, denoted co(S), is lo que prueba que la combinación /x también el conjunto C . El subespacio asociado con el theconvex set is athe ofconv all convex sets S. The closed The of setintersection C,dedenoted C, is the setcontaining of all convex combinations conjunto afín C en este caso es which elhull espacio nulo A, ker.A/. convex hull of S is defined as the closure of co(S). of points in C: 26 2 Convex sets n Si S R , la envoltura afín de Sconclude , aff.S /, es intersección de todos los conjuntos afinescone. que contienen a S . Como se thislasection by defining a cone and a convex A convFinally, C = {θwe 1 x1 + · · · + θk xk | xi ∈ C, θi ≥ 0, i = 1, . . . , k, θ1 + · · · + θk = 1}. puede comprobar, aff.S / Dcone aff.conv.S //. kind of convex set that arises quite frequently. convex is a special suggests, hullx conv is always convex. is thesmallest Un conjunto CAsthe Rnname se dice un conothe si convex para todo 2 C ,Cx 2 C , para todo It escalar 2 R tal que 0. Un convex set that contains C: If B is any convex set that contains C, then conv C ⊆ B. Figure 2.3 illustrates the definition of convex hull. The idea of a convex combination can be generalized to include infinite sums, integrals, and, in the most general form, probability distributions. Suppose θ1 , θ2 , . . . x1 0 x2 0 Not convex Figure 2.4 The0pie slice shows all points of the form θ1 x1 + θ2 x2 , where 0 0) is at θ1 , θ2 ≥ 0. The apex of the slice (which corresponds to θ1 = θ2 = 0; its edgesNot (which correspond to θ1 = 0 or θ2 = 0) pass through the points convex Convex x1 and x2 . Figura 8.9: Tres conos: el primero y el segundo no son convexos; el tercero si Fig. B.3 Cones cono que también es convexo se denomina cono convexo (figura ??). En este caso, para todo x1 ; x2 2 C y 1 ; 2 0, 1 x1 C 2 x2 2 C . El conjunto fx 2 Rm W x D A˛; A 2 Rmn ; ˛ 2 Rn ; ˛ 0g es un cono convexo generado por los vectores columna de la matriz A. 0 0 Figure 2.5 The conic hulls (shown shaded) of the two sets of figure 2.3. Figura 8.10: Envoltura cónica de los dos conjuntos de la figura ?? El conjunto de todas las combinaciones cónicas, 1 x1 C C k xk , 1 ; : : : ; k 0, de los puntos de un conjunto C es la envoltura cónica de C , cone.C /.. 20 X X i i λ x : k ∈ N, x ∈ X, λ ∈ R, i = 1, 2, . . . , k ; λ = 1 a f f (X) = i i i Figura 8.8: Envoltura cónica de los dos conjuntos de la figura 8.6 0 0 Figure 2.5 The conic hulls (shown shaded) of the two sets of figure 2.3. i=1 i=1 Teorema de Carathéodory para convexos Un punto x es un punto extremo de un conjunto convexo C si y sólo si no es interior a un segmento de recta contenido Teorema de Carathéodory para conos en C . Es decir, si y sólo si Teorema 2.2. Si X ⊂ Rn y x ∈ conv (X), existen xi ∈ X y λ ≥ 0, i = 1, . . . , n + 1, Un punto deDun conjunto convexo C sixno interior a ·un x .1 (X), ˇ/y Cexisten ˇz con 0<ˇ 1 y si y; zyy 2sólo C D yes z: 1, 2, Teorema 2.1. xSiesXun⊂punto Rn yextremo x ∈ cone xi< ∈ X λi)≥ 0, iD= · ·segmento , n, i de recta contenido n+1 n+1 P P n si y sólo si en C . Es decir, P Dos debido a Carathéodory R iy xEs 2 cone.X /, existen x y , i D 1; : :elemento : ; n, i resultados λi . Es =decir, 1, cualquier tales que dicen x =quedesi Xlaλcónica decir, cualquier de la envoltura P importantes i x . de tales que x = tales λi xque .con Es elemento envoltura cónica dede,X essumo, x D decir, x cualquier elemento de la envoltura X es combinación cónica a lo P n n iD1 i i i=1D .1 si ˇ/y i=1 n ˇz con 0 < ˇ < x Dque y xDDz: i=1 n puntos de X. Igualmente, X RC y x 2 conv.X /, existen x1 yy y; , i zD21; C : : : ; n) C 1,xtales i i nC1 i i iD1 i xi . Es decir, cualquier elemento de la envoltura convexa de X es combinación convexa de, a lo sumo, n C 1 puntos de X. La figura 8.9 ilustra estos resultados. convexa de X neselementos combinación combinación cónica de, a lo sumo, de X.convexa de, a lo sumo, n + 1 puntos de X. Figura 8.9: El teorema de Carathéodory Teorema de Carathéodory para convexos Figura 8.11: El teorema de Carathéodory Llamaremos hiperplano H de vector característico a 2 Rn ; a ¤ 0, al conjunto H D fx 2 Rn W aT x D cg, con n i (X), Teorema 2.2. Si cX2importantes ⊂UnRhiperplano y xdebido ∈ existen ∈ i= 1, . . . ,/,nexisten + 1, xi y i , i D 1; : : : ; n, R. es elconv conjunto de soluciones de dicen unax ecuación i R≥ Dos resultados a Carathéodory queXlineal siyXλen R. n0,y x 2 cone.X P n+1 n+1 n Un hiperplano en R es un espacio afín o una variedad lineal .n 1/-dimensional. P P x D iD1 i xi . Es decir, elemento de la envoltura cónica de X es combinación cónica i ˚ de, a lo sumo, que x = H , aλcualquier . Es decir, cualquier elemento de la envoltura contales λque PnC1 Dado un hiperplano xi x D i = 1, tales n c, llamaremos semiespacios cerrados de borde H a los conjuntos H D x 2 R W a x c n n T C n T ˚ ni=1 puntos de X. Igualmente, si X R y x 2 conv.X /, existen ıxi y˚ i , in DT 1; : :: ; nı C ˚1, tales que x D iD1 i xi . y H D x 2 Rn W aTi=1 x c , y semiespacios abiertos de borde H a H C D x 2 R W a x > c y H D x 2 Rn W aT x < c . Es decir, elemento laconvexa envoltura convexa X de, a lo sumo, n C 1 puntos de X. La convexa decualquier X es Los combinación de,laaunión lodedesumo, nes+el espacio 1 puntos de X. semiespacios de de borde H son convexos; HCes y Hcombinación Rnconvexa . figura ?? ilustra estos En laresultados. figura 8.10 se representa el hiperplano x1 C 4x2 D 11, su vector característico a D Œ 1; 4T y los semiespacios HC y H . Llamaremos hiperplano H de vector característico a 2 Rn ; a ¤ 0, al conjunto H D fx 2 Rn W aT x D cg, con En un hiperplano aT x D c, la constante c determina el desplazamiento del hiperplano del origen. Un hiperplano se T c 2 R. Un hiperplano es el de conjunto dedonde unaxecuación enhiperplano Rn . (aT x0 D c). Esa última puede expresar la forma fxde W asoluciones .x x0 / D 0g, punto del 0 es cualquierlineal expresión se puede trabajar un poco más pues fx W aT .x x0 / D 0g D x0 C a? , donde a? es el complemento ortogonal n Un hiperplanodeen esfvun o una variedad lineal .n en un1/-dimensional. a, esRdecir W aTespacio v D 0g. Loafín que lleva a que un hiperplano consiste desplazamiento x0 más todos los vectores ˚ ortogonales al vector característico a: el conjunto de soluciones de aT x D c: x C ker.a/, recordemos. Dado un hiperplano H , aT x D c, llamaremos semiespacios cerrados 0de borde H a los conjuntos HC D x 2 Rn W aT x c Un politopo esun conjunto formado por la intersección de un número finito de semiespacios cerrados. Un politopo ˚ ˚ ı ˚ ı T por un punto. n conjunto por la intersección de unde número finito 2 Rnque W apasan x > c y H D x 2 Rn W aT x < c . y H D x 2 Rcónico W aTesxun c , yformado semiespacios abiertos borde Hdeasemiespacios H C D xcerrados Un poliedro es un politopo acotado y no vacío. Es fácil comprobar que la intersección de conjuntos convexos es convexa Los semiespacios de borde H son convexos; la unión de H convexos. y H Sies el espacio Rn . En la figura ?? se representa el hiy que, por lo tanto, los politopos y los poliedros son conjuntos C un politopo P es un poliedro, cualquier punto se puede expresar como combinación convexa de sus puntos extremos. a Teorema 8.1 Sea C un conjunto convexo e y un punto exterior a la adherencia de C . Existe un vector a tal que aT y < Kınfx2C aT x. H+ 21 x x̄0 a y H− H Figura 8.10: Hiperplano x1 C 4x2 D 11 y los semiespacios en los que divide R2 Figura 8.12: Hiperplano x1 C 4x2 D 11 y los semiespacios en los que divide R2 En un hiperplano aT x D c, la constante c determina el desplazamiento del hiperplano del origen. Un se puede expresar de la aTT.xy los x0 / D 0g, donde x0 es H cualquier punto del perplano x1 C 4x2 D 11,hiperplano su vector característico a forma D Œ fx1;W 4 semiespacios C yH . hiperplano (aT x0 D c). Esa última expresión se puede trabajar un poco más pues fx W aT .x x0 / D 0g D a?constante , donde a? esc eldetermina complementoelortogonal de a, es decirdel fv W hiperplano aT v D 0g. Lodel que lleva En un hiperplano aT x Dxc, desplazamiento origen. Un hiperplano se 0 Cla a que un hiperplano consiste en un desplazamiento x0 más todos los vectores ortogonales al vectorT T puede expresar de la forma fx W a .x x / D 0g, donde x 0 T 0 es cualquier punto del hiperplano (a x0 D c). Esa última característico a: el conjunto de soluciones de a x D c: x0 C ker.a/, recordemos. ? expresión se puede trabajarUnun pocoesmás pues fx W aT por .x la intersección x0 / D 0gdeD , donde a? es el complemento ortogonal 0 C afinito politopo un conjunto formado un x número de semiespacios cerraT dos.0g. Un Lo politopo conjunto formado por la intersección número finito de semiespade a, es decir fv W a v D quecónico llevaesa un que un hiperplano consiste endeunundesplazamiento x0 más todos los vectores cios cerrados que por un punto. ortogonales al vector característico a: pasan el conjunto de soluciones de aT x D c: x0 C ker.a/, recordemos. B.3y no Separating Supporting Hyperplanes Un poliedro es un politopo acotado vacío. Es fáciland comprobar que la intersección de conjuntos 519 Un politopo es un conjunto formado la intersección de un finito de semiespacios convexos es convexa ypor que por lo tanto los politopos y losnúmero poliedros son conjuntos convexos. En estacerrados. Un politopo figura se muestran varios politopos;de el del es un finito poliedro. cónico es un conjunto formado por la intersección uncentro número de semiespacios cerrados que pasan por un punto. Un poliedro es un politopo acotado y no vacío: ver figura ??. Es fácil comprobar que la intersección de conjuntos convexos es convexa y que, por lo tanto, los politopos y los poliedros son conjuntos convexos. Si un politopo P es un poliedro, cualquier punto se puede expresar como combinación convexa de sus puntos extremos. Teorema 8.2 Sea C un conjunto convexo e y un punto exterior a la adherencia de C . Existe un vector a tal que aT y < Kınfx2C aT x. Si un politopo P es un poliedro, cualquier punto se puede expresar como combinación convexa de Fig. B.5 21Polytopes sus puntos extremos. Teorema 8.1 Sea C un conjunto convexo e y un punto exterior a la adherencia de C . Existe un vector a tal que aT y < Kınfx2C aT x. It is easy to see that half spaces are convex sets and that the union of H+ and B.3 Separating and Supporting Hyperplanes 519 Fig.politopos: B.5 Polytopes Figura 8.13: Diversos el del centro, un poliedro D EMOSTRACIÓN Sea 2.5 .Separating and supporting hyperplanes It is easy to see that half spaces ı D Kınfare kxconvex yk2 >sets 0: and that the union of H+ and 47 x2C H− is the whole space. Existe un x0 en la frontera de C tal que kx0 yk2 D ı. Esto es así pues la función continua f .x/ D kx yk2 alcanza Definition. set which can bepor expressed as the intersection of a finite su mínimo en cualquier conjunto A cerrado y acotado lo que sólo es necesario considerar x ennumber la intersección de la ofbola closed halfdespaces to 2ı. be a convex polytope. adherencia de C y la abierta centro is y ysaid radio A continuación We probaremos a D polytopes x0 y satisface condiciones see thatque convex are thelassets obtaineddel as enunciado the familydel ofteorema. solutionsEn efecto, para E cualquier ˛, 0 to ˛ 1, al ser C un conjunto convexo, el punto x C ˛.x x / 2 C , por lo que 20 0 a set of linear inequalities of the form kx0 C ˛.x x0T/ yk2 kx yk2 : 0 2 a1 x b21 T a2 x b 2 E1 Desarrollando, T ·E3˛ 2 kx x0 k22 0: 2˛.x0 y/ .x x·0 / C · · Considerando esta expresión cuando ˛ ! 0C, se tiene que · · TT bmx0 / 0 .x0 ay/ m x .x o que since each individual inequality defines a half space and the solution family is Figure 2.18 Three ellipsoids in R2 , centered at the origin (shown as the the lower intersection of contain these half spaces. (If some a = 0, the set can still, as T ellipsoid dot), points dots.resulting The .x0 that y/T x .xthe y/T x0shown D .x as the y/iTupper y C .x y/ .x0 y/ 0 0 the Ereader may verify, be there expressed as the0 intersection of a finite number of half minimal, since exist ellipsoids that contain the points, and 1 is not T D .x y/same y Creason. ı2: 0 the are smaller (e.g., E3 ). E3 is not minimal for The ellipsoid spaces.) E2 is minimal, since no other ellipsoid (centered at the origin) contains the Several in Fig. B.5. We note that a polytope may be Haciendo a D x0 points y queda probado elare teorema. andpolytopes is contained inillustrated E2 . empty, bounded, or unbounded. The case of a nonempty bounded polytope is of specialgeométrica interest and weteorema distinguish this case by the following. La interpretación de este es que, dado un conjunto convexo C y un punto y exterior a la adherencia de C , existe un hiperplano que contiene a y, sin tocar a C , estando C en uno de sus semiespacios abiertos. Este hiperplano Definition. A nonempty bounded polytope is called a polyhedron. (de vector característico a en el teorema) se denomina hiperplano separador de C e y. Si C y D son dos conjuntos convexos disjuntos, C \ D D ;, existe entonces un a ¤ 0 y un b tales que aT x b, para todo x 2 C , y aT x todox 2 D. Dicho de otra manera, la función aT x b es no positiva en C y no negativa ˚ b, para T B.3 SEPARATING AND SUPPORTING en D. El hiperplano x W a x D b es un hiperplano separador de los conjuntos C y D como se ve en la figura ??. HYPERPLANES aT x ≥ bthe most aTimportant x≤b The two theorems in this section are perhaps results related to convexity. Geometrically, the first states that given a point outside a convex set, a hyperplane can be passed through the point that does not touch the convex set. The second, which is a limiting case of the first, states that given a boundary point of a D convex set, there is a hyperplane that contains the boundary point and contains the convex set on one side of it. C a Figure 2.19 The hyperplane {x Hiperplano | aT x = b} separates disjoint Figura 8.14: separadorthe entre C y Dconvex sets C and D. The affine function aT x − b is nonpositive on C and nonnegative on D. Existen bastantes principios de dualidad que se usan en la asignatura, en especial en la teoría y técnicas de optimización, que relacionan un problema en términos de vectores en un espacio vectorial con otro expresado en términos de subespacios 22 a Figure 2.19 The hyperplane {x Hiperplano | aT x = b} separates disjoint Figura 8.14: separadorthe entre C y Dconvex sets C and D. The affine function aT x − b is nonpositive on C and nonnegative on D. Figura 8.15: Distancia más corta de un punto a un conjunto convexo en términos de la de a hiperplanos separadores Figura 8.15: Distancia más corta de un punto a un conjunto convexo en términos de la de a hiperplanos separadores en ese espacio. En gran cantidad de esos principios está presente la relación que se ilustra en la figura 8.15. La distancia más corta de un punto a un conjunto convexo es igual al máximo de las distancias desde el punto a los hiperplanos que en ese espacio. En gran cantidad esos principios está presente la minimización relación que ilustraseen la figura ??. separan el conjuntode convexo del punto. El problema original de sobresevectores convierte en otro de La distancia más sobre hiperplanos. corta de un punto a maximización un conjunto convexo es igual al máximo de las distancias desde el punto a los hiperplanos que separan el conjunto convexo Teorema del punto. ElCproblema vectores 8.3 Sea un conjunto original convexo e yde un minimización punto frontera de C .sobre Existe un hiperplanose queconvierte contiene a yen y a otro C en de maximización sobre hiperplanos. uno de sus semiespacios cerrados. D EMOSTRACIÓN . Sea fy .k/ g una sucesión de puntos exteriores a la adherencia de C . Sea fa.k/ g la sucesión de puntos Teorema 8.3 Sea normalizados, C un conjunto e yde un punto frontera . Existe un hiperplano que contiene a y y a C en ka.k/ k2convexo D 1, obtenida aplicar el teorema anteriorde a laCsucesión anterior, tales que, uno de sus semiespacios cerrados. T T a.k/ y .k/ < Kınf a.k/ x2C x: .k/ Comofy fa.k/ g es una sucesión acotada, subsucesión fa.k/ g, k 2a H, a un límite se tiene D EMOSTRACIÓN . Sea g una sucesión deuna puntos exteriores laconvergerá adherencia de Ca..Para Seaestefaa.k/ g laque, sucesión de puntos x 2 C, normalizados, ka.k/para k2 cualquier D 1, obtenida de aplicar el teorema anterior a la sucesión anterior, tales que, T T aT y D lKım a.k/ y .k/ lKım a.k/ x D aT x: k2H k2H T T .k/ .k/ .k/ K a y < ı nf a x: cerrados y que contiene algún punto Un hiperplano que contiene un conjunto convexo C en uno de sus semiespacios x2C frontera de C se denomina hiperplano de apoyo de C . De acuerdo con esta definición, el teorema anterior dice que, dado un conjunto convexo C y un punto frontera y de C , .k/ Como fa.k/ g es unaexiste sucesión acotada, una subsucesión g, k 2 H, convergerá a un límite a. Para este a se tiene que, un hiperplano de apoyo de C que contiene y.fa ˚ para cualquier x 2 C En , la figura 8.16 x W aT x˚ D aT x0 es el hiperplano de apoyo de C en el punto x0 : el punto x0 y el conjunto C están ˚ x .TGeométricamente quiere decir T separados por el hiperplano x W aT x D aT.k/ x W aT x D aT x0 es 0 T .k/ que el hiperplano T ˚ yT.k/ T lKım a y D lK ı m a a x D a x: tangente al conjunto C en x0 y el semiespacio x W a x a x0 contiene a C . k2H k2H Un hiperplano que contiene un conjunto convexo C en uno 24 de sus semiespacios cerrados y que contiene algún punto frontera de C se denomina hiperplano de apoyo de C . De acuerdo con esta definición, el teorema anterior dice que, dado un conjunto convexo C y un punto frontera y de C , Dual de cones andcontiene generalized 51 existe un hiperplano2.6 de apoyo C que y. inequalities a x0 C Figure 2.21 The hyperplane {x | aT x = aT x0 } supports C at x0 . Figura 8.16: Hiperplano de apoyo de C en x0 ˚ En la figura ?? x W aT x D aT x0 es el hiperplano de apoyo de C en el punto x0 : elT puntoTx0 y el conjunto C están that the ˚point xT0 and the set C are separated by the hyperplane {x | a x = a x0˚}. T T separados por el hiperplano x W a interpretation x D aT x0 . Geométricamente quiere T hiperplano x W a x D a x0 es The geometric is that the hyperplane {xdecir | aT xque = ael x } is tangent 0 to C at x0 , and the halfspace {x | aT x ≤ aT x0 } contains C. This is illustrated in figure 2.21. A basic result, called the supporting hyperplane theorem, states that for any nonempty convex set C, and any x0 ∈ bd C, there exists a supporting hyperplane to C at x0 . The supporting hyperplane theorem is readily proved from the separating hyperplane theorem. We distinguish two cases. If the interior of C is nonempty, the result follows immediately by applying the separating hyperplane theorem to the sets {x0 } and int C. If the interior of C is empty, then C must lie in an affine set of dimension less than n, and any hyperplane containing that affine set contains 23 C and x0 , and is a (trivial) supporting hyperplane. There is also a partial converse of the supporting hyperplane theorem: If a set is closed, has nonempty interior, and has a supporting hyperplane at every point in its boundary, then it is convex. (See exercise 2.27.) ˚ tangente al conjunto C en x0 y el semiespacio x W aT x aT x0 contiene a C . Lema 8.4 (Farkas) El sistema de ecuaciones Ax D b; .I / x 0; no tiene solución si y sólo si la tiene el sistema y T A 0T ; .II / bT y > 0; donde A 2 Rmn . D EMOSTRACIÓN . El lema se puede reformular de la siguiente manera. Si existe un x 0 tal que Ax D b, no existe ningún y tal que y T A 0T y bT y > 0. Recíprocamente, si no existe ningún x 0 tal que Ax D b, existe un y tal que y T A 0T y bT y > 0. Supongamos que el sistema (I) tiene una solución x tal que Ax D b y x 0. Sea y un punto tal que y T A 0T . En este caso bT y D x T A T y 0 pues x 0 y y T A 0T . Esto demuestra que bT y no puede ser positivo y, por lo tanto, el sistema (II) no tiene solución. Supongamos ahora que el sistema (I) no tiene solución. Esto quiere que by…condiciones S D fv D Ax W x 0g;473 es decir 8.1 decir Dualidad de óptimo que b no pertenece al politopo cónico S . Observando la figura ??, está claro que si b … S , existe un hiperplano separador Politopo cónico S a3 a2 a1 a4 a5 Hiperplano b∈ /S y Figura 8.2 Figura 8.17: Demostración del lema de Farkas Descripción geométrica de la existencia de un hiperplano separador definido por un y, que separa S y b, y para el cual y T ai 0, i D 1; : : : ; n y y T b > 0, es decir, y forma un ángulo de más de grados con cada uno de los habitualmente, vectores columna de de menos de 90 grados con8forma b. Estosimétrica verifica que el El 90 par (P)-(D) se denomina en Alayliteratura especializada, sistema (II) tiene solución. de la dualidad. A continuación exponemos dos teoremas que caracterizan las soluciones óptimas del par de Elproblemas lema de Farkas es un resultado importante para el estudio de sistemas lineales de inecuaciones. Su interpretación primal-dual. geométrica es la siguiente: de de Holguras) x se ey soluciones factibles de decir 1. Si Teorema ai ; i D 1; : :8.3 : ;P n, (Complementariedad son los n vectores columna la matriz Sean A, que cumpla que b D Ax, x del 0,par quiere n primal-dual en forma simétrica (P)-(D) de (8.8). Las condiciones necesarias y queprogramas el vector b D a x , x 0; en otras palabras, que b pertenece al politopo cónico generado por los vectores i i D1 i i suficientes para que sean deejemplo sus respectivos problemas columna de A. En la figura ?? seóptimos muestra un donde el sistema (I) no son: tiene solución: el vector b no pertenece 8 El hiperplano separador del politopo cónico S de la figura debería T tocar a éste a lo largo de a . El hiperplano de apoyo correspondiente, sí “casi” 5 A)x = 0 (8.9) (cT − y tocaría a a5 . y y T (Ax 24 − b) = 0. (8.10) Demostración. Como x e y son soluciones factibles de (P) y (D), respectivamente, se tiene que 474 Capı́tulo 8. Dualidad y análisis de sensibilidad Semiespacio abierto {y : bT y > 0} a2 an 474 Capı́tulo 8. Dualidad y análisis de sensibilidad a1 a3 b Semiespacio abierto {y : bT y > 0} a2 an a1 a3 Cono {y : y T A ≤ 0 T } b Figura 8.3 no tiene solución; si (II) Figura 8.18: El sistema (I) del lema de Farkas El sistema (I) del lema de Farkas no tiene solución. La tiene (II) al cono generado por a1 , a2 , a3 y aTn . La intersección del cono fy W y T A 0T g (conjunto formado por los vectores T {y : y A ≤ 0 } Cono ı y que forman un ángulo mayor o igual dea90 con los vectores columna de la matriz A) y el semiespacio abierto 2 fy W bT y > 0g, no es el conjunto vacío: el sistema (II) tiene solución, pues b y cualquier y en el cono que define la zona sombreada forma un ángulo menor de 90ı y, por lo tanto, bT y > 0. an 2. El sistema (II) no tiene solución si la intersección del cono fy W y T A 0T g y el semiespacio abierto fy W bT y > 0g es el conjunto vacío. En la figura ??ase muestra unFigura ejemplo donde 8.3 el sistema (II) no tiene solución. Todo vector y en b 1 ı la zona que define el indicado un ángulo mayor no de 90 consolución. b. La tieneLa sintiene embargo Elcono sistema (I) forma del lema de Farkas tiene (II)(I) pues b pertenece al cono generado por a1 , a2 y an . Semiespacio abierto {y : bT y > 0} a2 an a1 b Cono {y : y T A ≤ 0T } Semiespacio abierto {y : bT y > 0} Figura 8.4 El sistema (II) del lema de Farkas no tiene solución. La tiene (I) Cono {y : y T A ≤ 0T } Figura 8.19: El sistema (II) no tiene Figura 8.4 solución. La tiene (I) El sistema (II) del lema de Farkas no tiene solución. La tiene (I) 9 Funciones Recordemos que una función es un caso particular de aplicación donde los conjuntos origen e imagen son conjuntos de números. 25 Una función f W Rn ! R se dice continua en x si para toda sucesión fx .k/ g que converge a x (expresado x .k/ ! x), se cumple que f .x .k/ / ! f .x/. De forma equivalente, f se dice continua en x si dado un " > 0, existe un ı > 0 tal que ky xk < ı H) kf .y/ f .x/k < " : Una función f W R ! R se dice satisface la condición de Lipschitz con constante en un conjunto X, si para todo x e y pertenecientes a X se cumple que jf .x/ f .y/j jx yj: Una función que satisface la condición de Lipschitz en un conjunto X se dice continua -Lipschitz en ese X, designándose f 2 Lip .X /. Dada una norma vectorial k k en Rn y otra matricial k k en Rmn , m; n > 0, una función g W Rn ! Rmn se dice satisface la condición de Lipschitz con constante en un abierto D Rn , si para todo x e y pertenecientes a D se cumple que kg.x/ g.y/k kx yk: Una función g que satisface la condición de Lipschitz en D se dice continua -Lipschitz en ese D, designándose g 2 Lip .D/. Un resultado muy interesante referido a funciones continuas es el teorema de Weierstrass, que dice que una función continua definida en un conjunto compacto S tiene un punto donde alcanza un mínimo en S . Es decir, existe un x 2 S tal que para todo x 2 S , f .x/ f .x /. Un conjunto de funciones f1 ; f2 ; : : : ; fm de Rn en R se puede considerar como una función vectorial f D Œf1 ; f2 ; : : : ; fm T : Esta función asigna a todo vector x 2 Rn otro vector f .x/ D Œf1 .x/; f2 .x/; : : : ; fm .x/T de Rm . Tal función vectorial se dice continua si lo es cada uno de sus componentes f1 ; f2 ; : : : ; fm . Si cada una de las funciones de f D Œf1 ; f2 ; : : : ; fm T es continua en algún conjunto abierto de Rn , se dice f 2 C . Si además cada función componente tiene derivadas parciales de primer orden continuas en ese abierto, se dice que f 2 C 1 . En general, si las funciones componentes tienen derivadas parciales de orden p continuas, se indica f 2 C p . Si f W Rn ! R y f 2 C 1 , se define el vector gradiente de f como el vector rf .x/ D @f .x/ @f .x/ @f .x/ ; ;:::; @x1 @x2 @xn T : También se puede ver expresado alguna vez como fx .x/. Si f 2 C 2 , se define la matriz Hessiana de f en x como la matriz n n 2 2 3 @ f .x/ @2 f .x/ @2 f .x/ 6 @2 x @x1 @x2 @x1 @xn 7 6 7 1 6 2 7 2 6 @ f .x/ @ f .x/ @2 f .x/ 7 6 7 2 r 2 f .x/ D 6 @x2 @xn 7 6 @x2 @x1 @ x2 7: :: :: :: 6 7 :: 6 7 : : : 6 2 : 7 4 @ f .x/ @2 f .x/ @2 f .x/ 5 @xn @x1 @xn @x2 @2 xn A esta matriz también se la puede ver designada como F .x/. Para la función vectorial f D Œf1 ; f2 ; : : : ; fm T , f 2 C 1 , se define la matriz Jacobiana como la matriz m n 2 3 @f1 .x/ @f1 .x/ @f1 .x/ 6 @x1 @x2 @xn 7 6 7 6 @f2 .x/ @f2 .x/ @f2 .x/ 7 6 7 6 7 @x2 @xn 7 : rf .x/ D J .x/ D 6 @x1 6 7 :: :: :: :: 6 7 : : : : 6 7 4 @fm .x/ @fm .x/ @fm .x/ 5 @x1 @x2 @xn Si f 2 C 2 , es posible definir m Hessianas F1 .x/; F2 .x/; : : : ; Fm .x/ para cada una de las f1 ; : : : ; fm . 26 Una función f W Rn ! Rm es afín si es la suma de una función lineal y una constante; es decir, tiene la forma f .x/ D Ax C b, donde A 2 Rmn y b 2 Rm . Teorema 9.1 Teorema de Taylor. Si f W Rn ! R y f 2 C 1 en una región que contiene el segmento Œx1 ; x2 , es decir puntos ˛x1 C .1 ˛/x2 ; 0 ˛ 1, existe un , 0 1, tal que f .x2 / D f .x1 / C r T f x1 C .1 /x2 .x2 x1 / : Además, si f 2 C 2 , existe un ; 0 1, tal que f .x2 / D f .x1 / C r T f .x1 /.x2 1 x1 / C .x2 2 x1 /T F x1 C .1 /x2 .x2 x1 / ; donde F denota la matriz Hessiana de f . Si la función f W R ! R es continua y derivable k C 1 veces en un intervalo, o segmento, Œx; x0 , existe un b entre x y x0 tal que f .x/ D f 00 .x0 / x0 C x 2Š k f .kC1/ .b/ x0 C x .k C 1/Š 2 f .x0 / C f 0 .x0 / x x0 f .k/ .x0 / x kŠ x0 C C kC1 f 000 .x0 / x 3Š : x0 3 C Las aproximaciones por este teorema para una función concreta, sen.x/, se pueden ver en la figura ??. Figura 9.20: Función sen.x/ y, en x D 0, las aproximaciones por Taylor de primer orden, de orden 3, 5, 7, 9, 11 y 13 Una función f W Rn ! R se dice convexa (figura ??) si cumple que f .˛x C ˇy/ ˛f .x/ C ˇf .y/ para todo x; y 2 Rn y todo ˛; ˇ 2 R, con ˛ C ˇ D 1, ˛ 0, ˇ 0. Si S Rn es un conjunto convexo y f W Rn ! Rm es una función afín, la imagen de f .S / D ff .x/ W x 2 S g es un conjunto convexo. De forma similar, si f W Rk ! Rn es una función afín, la imagen inversa f 1 .S / D fx W f .x/ 2 S g también es convexa. Teorema 9.2 Teorema del valor intermedio. Si f W R ! R es una función continua en el intervalo Œa; b, toma todos los valores entre f .a/ y f .b/. Más concretamente, si y es un número entre f .a/ y f .b/, existe un número c dentro de Œa; b, es decir, tal que a c b, en el que f .c/ D y. 27 y = f(x) y 20 | convex CHAPTER 0 Fundamentals (a) Figura 9.21: Función convexa x f f (c) f (c) y a c a b (a) x convex Figura 9.22: Teorema del valor intermedio (b) c b (b) Figure 0.1 Three important theorems from calculus. There a and b such that: (a) f (c) = y, for any given y between f (a 0.4, the Intermediate Value Theorem (b) the instantaneous sl (f (b) − f (a))/(b − a)enbyel Theorem 0.6,b, the Mean Value Theor Teorema 9.3 Teorema del valor medio. Si f W R ! R es una función continua y derivable intervalo Œa; existe 0 region is equal in area to the horizontally shaded region, by un número c entre a y b tal que f .c/ D f .b/ f .a/ =.b a/. Value Theorem for Integrals, shown in the special case g(x) = Teorema 9.4 Teorema de Rolle. Si f W R ! R es una función continua y derivable en el intervalo Œa; b y suponemos que f .a/ D f .b/, existe entonces un número c, entre a y b, tal que f 0 .c/ D 0. G ENERALIZACIÓN Si f W R ! R THEOREM 0.4de orden (Intermediate Value Theorem) Let fnbe a continuous funct es continua y derivable n 1 veces en Œa; b y la derivada n existe en el abierto .a; b/, y existen intervalos a1 < b1 a2 < b2 : : : an < bn en Œa; b, tales que f .ak/ D f .bk/ every para todo k Dbetween 1 : : : n, existe un and número c More preci f realizes value f (a) f (b). en .a; b/ tal que la derivada de orden n de f en c es cero. f (a) and f (b), then there exists a number c with a ≤ c ≤ b f | CHAPTER 0 Fundamentals x EXAMPLE nonconvex 0.7 Show that f (x) = x 2 − 3 on the interval [1, 3] must take o (c) f (c) Because ff (c) (1) = −2 and f (3) = 6, all values √ betw Fig. 7.3 Convex and nonconvex 1, mustfunctions be taken on by f . For example, setting c = 3, not y secondly, f (2) = 1. THEOREM 0.5 a c b (a) a c n→∞ (c) n→∞ (b) Figura 9.23: Teorema del valor medio othercalculus. words, There limitsexist maynumbers be brought inside continuou Figure 0.1 Three important theoremsInfrom c between a and b such that: (a) f (c) = y, for any given y between f (a) and f (b), by Theorem THEOREM 0.6 (Mean Value Theorem) Let f be a continuously differen 0.4, the Intermediate Value Theorem (b) the instantaneous slope of f at c equals [a, b]. Then there exists a number c between a and b such (f (b) − f (a))/(b − a) by Theorem 0.6, the Mean Value Theorem (c) the vertically shaded (b − a). region is equal in area to the horizontally shaded region, by Theorem 0.9, the Mean Value Theorem for Integrals, shown in the special case g(x) = 1. 28 EXAMPLE 0.8 THEOREM 0.4 (Continuous Limits) Let f be a continuous function in a ne limn→∞ xn = x0 . Then b b c a lim f (xn ) = f lim xn = f ( Apply the Mean Value Theorem to f (x) = x 2 − 3 on the in (Intermediate Value Theorem) Let f be a continuous function on the interval [a, b]. Then The content of the theorem is that because f (1) = f realizes every value between f (a) and f (b). More precisely, if y is a number between exist a number c in the interval (1, 3) satisfying f (c) = (6 − Figura 9.24: Teorema de Rolle Teorema 9.5 Teorema del valor medio de las integrales. Si f W R ! R es una función continua en el intervalo Œa; b y g W R ! R una función integrable que no cambia de signo en Œa; b, existe entonces un número c entre a y b tal que Z f(c) b a f .x/g.x/ dx D f .c/ Z b g.x/ dx: a f (c) a c b (b) a c b (c) Figura 9.25: Teorema del valor medio de las integrales 0.1 Three important theorems from calculus. There exist numbers c between b such that: (a) f (c) = y, for any given y between f (a) and f (b), by Theorem 9.1 Condiciones necesarias y suficientes de primer y segundo orden que ha de cumplir un e Intermediate Value Theorem (b) the instantaneous slope of f at c equals punto mínimo − f (a))/(b − a) by Theorem 0.6, the Mean Value Theorem (c) the vertically shaded n definir condiciones y suficientes determinar is equal in areaSetotrata thedehorizontally shadednecesarias region, by Theorem para 0.9, the Mean si dada f W ! R, 2 R , un punto x cumple Theorem for Integrals, shown in the special case g(x) = 1. minimizar f .x/: x Un punto x 2 se dice que es un mínimo local de la función f W ! R si existe un > 0 tal que f .x/ f .x / te Value Theorem) Let f be a continuous function on the interval [a, b]. Then para todo x 2 a una distancia menor que de x . Es decir, para todo x 2 tal que jx x j < . Si f .x/ > f .x / a number between very value between para todo x f2(a) , xand ¤ x f, (b). a una More distanciaprecisely, menor que ifdey xis , se dice que x es un mínimo local estricto de f en . (b), then there exists a number c with a ≤ c ≤ b such that f (c) = y. Teorema 9.6 Condiciones necesarias de primer orden Sea un subconjunto de Rn y una función f W ! R, f 2 C 1 . Si x en un mínimo local de f en , se cumple que rf .x / D 0. en the x seinterval cumple que / D take 0, al punto x values se le denomina (x) = x 2 − 3Sion [1,rf 3].x must on the 0 andestacionario. 1. Teorema 9.7 Condiciones necesarias de segundo orden Sea un subconjunto de Rn y una función f W ! R, cause f (1) = 6, alllocal values −2 and f −2 2 C 2and . Si xf (3) en un=mínimo de en , se cumple que 6, rfincluding .x√ / D 0 y r02and f .x / es semidefinida positiva. √f between aken on by f . For example, setting c = 3, note that f (c) = f ( 3) = 0, and Teorema 9.8 Condiciones suficientes de segundo orden Sea un subconjunto deRn y una función f W ! (2) = 1. 2 2 R, f 2 C . Si se cumple que rf .x / D 0 y r f .x / es definida positiva, x en un mínimo local estricto de f en . Teorema 9.9 Si f es convexa, cualquier mínimo local x es un mínimo global de f . Si además f es derivable, local x function es un mínimo de f . Letcualquier f be amínimo continuous in aglobal neighborhood of x0 , and assume s Limits) = x0 . Then lim f (xn ) = f n→∞ lim xn = f (x0 ). 29 n→∞ r words, limits may be brought inside continuous functions. 9.2 Teorema de la función implícita Teorema 9.10 Sea x0 D Œx01 ; x02 ; : : : ; x0n T un punto de Rn que satisface estas condiciones: (a) Las m funciones fi 2 C p , i D 1; 2; : : : ; m, en algún entorno de x0 , para alguna p 1. (b) fi .x0 / D 0; i D 1; 2; : : : ; m: 2 @f1 .x0 / 6 @x1 6 :: (c) La matriz Jacobiana de la función vectorial, rf .x0 / D 6 4 @fm:.x0 / @x1 Entonces existe un entorno de xO 0 D Œx0mC1 ; x0mC2 ; : : : ; x0n T 2 Rn O i D 1; 2; : : : ; m tales que: ese entorno existen funciones i .x/, m 3 @f1 .x0 / @x: m 7 7 :: 7, es regular. @fm .x0 / 5 @xm :: : tal que para xO D ŒxmC1 ; xmC2 ; : : : ; xn T en (i) i 2 C p . (ii) x0i D i .xO 0 /; i D 1; 2; : : : ; m. O 2 .x/; O : : : ; m .x/; O x/ O D 0; i D 1; 2; : : : ; m. (iii) fi .1 .x/; Este teorema 9 es muy útil para respaldar la caracterización de puntos óptimos en programación matemática con y sin condiciones, solución de ecuaciones lineales y no lineales y muchos otros aspectos que analizamos en la asignatura. Supóngase que se tiene una función vectorial f W Rn ! Rm que cumple fi .x/ D 0; i D 1; 2; : : : ; m: El teorema de la función implícita estudia, si n m de las variables son fijas, si el problema se puede resolver en m incógnitas. Es decir, si x1 , x2 ; : : : ; xm se pueden expresar en función de las restantes n m de la forma xi D i .xmC1 ; xmC2 ; : : : ; xn / ; A las funciones i W Rn m i D 1; 2; : : : ; m: ! R, si existen, se las denomina funciones implícitas. Ejemplo 9.1 Consideremos la ecuación x12 C x2 D 0. Una solución de la misma es x1 D, x2 D 0. En un entorno de esta solución, sin embargo, no hay función tal que x1 D .x2 /. En esta solución no se cumple la condición .c/ del teorema u de la función implícita. En cualquier otra solución si existe dicha . Ejemplo 9.2 Sea A una matriz m n y considérese el sistema de ecuaciones lineales Ax D b. Si A se estructura así, A D ŒB; C , donde B es m m, entonces se satisface la condición .c/ del teorema de la función implícita si, y sólo si, B es regular. Esta condición se corresponde con los requisitos y enunciados de la teoría de ecuaciones lineales. La función u implícita se puede considerar como una generalización no lineal de la teoría lineal. 10 Dualidad en Programación Matemática y Optimización La Dualidad y su teoría juega un papel muy destacado en Programación y Optimización lineal y no lienal, donde se trata de resolver el problema general minimizar f .x/ n x2R sujeta a ci .x/ D 0; cj .x/ 0; i 2 E; j 2 I: Las función objetivo, f , y las condiciones, ci y cj , son, en general, no lineales, continuas y tienen derivadas parciales continuas hasta al menos primer orden. Los conjuntos E y I contienen los índices de las condiciones de igualdad y de desigualdad, o inecuaciones. Desde el punto de vista práctico, en los algoritmos de resolución de este problema, la dualidad sirve para verificar la optimalidad de un proceso iterativo o las condiciones de óptimo, para analizar la sensibilidad de una solución a la 9 Sus orígenes están asociados a Newton, Leibnitz y Lagrange, pero fue formulado por Cauchy 30 variación de los parámetros del problema, para estudiar la velocidad de convergencia de determinados algoritmos de optimización que usan su formulación y contemplar diversos aspectos geométricos que permiten interpretar mejor lo que se está haciendo en la búsqueda de una solución. 436 Chapter 14 Dual and Cutting Plane Methods Las ideas y formulación que exponemos a continuación siguen enteramente lo que expone al respecto el libro de Luenberger citado en el apartado de bibliografía. Se basa en una forma elegante y global de contemplar la dualidad en términos de conjuntos e hiperplanos que tocan esos conjuntos. Evidencia el papel de los multiplicadores de Lagrange como considered to ser points in a vector space. The theory provides a symmetry definidores de hiperplanosas quedual pueden considerados los duales de puntos en un espacio vectorial. Esta forma teórica de primal and dual problems and symmetry be considered as perfect perfecta si enfrentarse abetween la dualidad proporciona una simetría entre losthis problemas primalcan y dual, la cual pude considerarse forsonconvex problems. Forlanon-convex the “imperfection” is gap made clear o brecha los problemas convexos. Si no lo son, imperfección problems la plasma claramente el denominado de dualidad dual, que tiene geométrica sencilla en este contexto, y mucha The importancia los algoritmos de by una the interpretación duality gap which has muy a simple geometric interpretation. global en theory, programación lineal is y nopresented lineal que se en el curso en la as asignatura. which in estudian this section, serves useful background when later we specialize toincógnitas a local duality theory that can be useddeeven without convexity and En el problema dual las por resolver son los multiplicadores Lagrange del problema primal, que miden las sensibilidades del primal a variaciones en los coeficientes que determinan las condiciones de este problema y determinan which is central to the understanding of the convergence of dual algorithms. como unas penalizaciones que se introducen en su función objetivo por no utilizar los recursos que fijan esas As a counterpoint to Section 11.9 where equality constraints were considered condiciones adecuadamente. La función de Lagrange a este respecto incorpora toda la información disponible del problema. before inequality constraints, here we shall first consider a problem with inequality La teoríaconstraints. global que seInexpone en esteconsider apéndice the es laproblem base sobre la que construir dualidades de tipo local para los particular, diversos problemas lineales y no lineales como los que se verán en los distintos temas del curso, incluso sin la existencia de convexidad, o en algoritmos especializados para problemasfx de Programación Lineal como los de punto minimize (1)interior, dual del Símplex, etc. to gx ≤0 De momento vamos a referirnos a problemas subject de programación matemática como este x ∈ minimizar f .x/ n x2R andg0are defined on . The function g ⊂ E n is a convex set, and the functions (1) sujeta a f g.x/ is p-dimensional. The problem is not necessarily x 2 ; convex, but we assume that there is a feasible point. Recall that the primal function associated with (1) is defined for n asconjunto convexo y las funciones, la escalar f W Rn ! R y la vectorial g W Rp ! Rn , están E donde 2 zR∈ espun definidas en . Este problema no es necesariamente convexo pero se asume que tiene al menos un punto factible. Esta z = que inf se fx gx ≤ zque x ∈adoptar la convención de signos (2)adecuada. notación es perfectamente compatible con otras utilizan sin más La función primal asociada a (??) define,hand para un z 2 of Rp ,inequality como defined by letting these right side constraint take on arbitrary values. It is understood !.z/ that (2) isffdefined on thez; x set2 D D Kınf .x/ W g.x/ g:= z gx ≤ z, for some (2) x ∈ . ∗ Se llega a ella dejando que el (1) término la derecha la inecuación definen las condiciones puedaon tomar valores If problem has adesolution x∗dewith value f ∗ que = fx , then f ∗ is the point p+1 arbitrarios. Se entiende que (??) está definida en el conjunto D D fz W g.x/ z; para algunos x 2 g. the vertical axis in E where the primal function passes through the axis. If (1) ∗ valor de la función objetivo igual a f D f .x /, entonces f es el Si el problema (??) tiene una solución confun does not have a solution, xthen = inffx gx ≤ 0 x ∈ is the intersection pC1 punto de ejepoint. vertical de R donde la función primal se cruza con ese eje. Si (??) no tiene solución, ese punto de cruce es f D Kınf ff .x/ W g.x/ 0; principle x 2 g. is derived from consideration of all hyperplanes that lie The duality El principio de dualidad se deduce de la As consideración hiperplanos que quedan por vertical debajo de la función below the primal function. illustrateddeintodos Fig. los 14.1 the intercept with the ∗ con el eje vertical por debajo de f , o primal. Como ilustra la figura ??, todos los hiperplanos que se indican se cruzan axis of such a hyperplanes lies below (or at) the value f . en f . w(z) r f* Hiperplano debajo de w(z) z Fig. 14.1 Hyperplane below z Figura 10.26: Hiperplano por debajo de !.z/. 31 Para expresar esta propiedad se define la función dual en el cono positivo de Rp como ./ D Kınf ff .x/ C Tg.x/ W x 2 g: (3) p En general, puede que no sea finita dentro del ortante positivo, RC , pero la región donde está definida es convexa. Proposición 10.1 La función dual es cóncava en la región donde es finita. D EMOSTRACIÓN . Supóngase que 1 y 2 están en la región finita y sea 0 ˛ 1. Entonces .˛1 C .1 ˛2 // D Kınf ff .x/ C .˛1 C .1 ˛/2 /T g.x/ W x 2 g Kınf f˛f .x1 / C ˛T1 g.1 / W x1 2 g C Kınf f.1 ˛/f .x2 / C .1 D ˛.1 / C .1 ˛/.2 /: ˛/T2 g.x2 / W x2 2 g Se define D sup f./ W 0g, suponiéndose que el supremo se extiende a toda la región donde es finita. Ahora pasamos a la forma débil de la dualidad. Proposición 10.2 Forma débil de dualidad. f . D EMOSTRACIÓN . Para todo 0 se tiene que ./ D Kınf ff .x/ C T g.x/ W x 2 g Kınf ff .x/ C T g.x/ W g.x/ 0; x 2 g Kınf ff .x/ W g.žx/ 0; x 2 g D f : Adoptando e supremos de .x/ se tiene que f . De acuerdo con este resultado, la función dual proporciona cotas inferiores del valor óptimo de f . La función dual tiene una interpretación geométrica interesante. Si se considera el vector Œ1 T T 2 RpC1 , con 0 y la constante c, el conjunto de vectores Œr zT T 2 RpC1 tales que el producto interior Œ1 T Œr zT T r C T z D c define un hiperplano en RpC1 . Para diferentes valores de c se tiene diferentes hiperplanos, todos paralelos entre si. Para un vector dado Œ1 T T consideremos el hiperplano más bajo posible de esa forma que casi toca —soporta— la región de encima de la función primal del problema (??). Supongamos que x1 define ese punto de contacto y que r D f .x1 / y z D g.x1 /. Se tendrá que c D f .x1 / C T b.x1 / D ./. Ese hiperplano se cruzará con el eje vertical en un punto de la forma Œr0 0T . Este punto también satisfará que Œ1 T T Œr0 0T D c D ./. Lo que lleva a que c D r0 . Por lo que ese punto dará ./ directamente. La función Chapter 14 donde Dualseand Cutting Plane Methods dual pues, en438 , en igual al punto cruzan el hiperplano definido por que justo toca el epigrafo —el conjunto de puntos situados por encima del gráfico de una función— de la función primal. w (z) f∗ gap de dualidad ϕ∗ hiperplano más alto z Fig. 14.2 TheHiperplano highest hyperplane Figura 10.27: más alto. Furthermore, this intercept (and dual function value) is maximized by the 32 Lagrange multiplier which corresponds to the largest possible intercept, at a point no higher than the optimal value f ∗ . See Fig. 14.2. By introducing convexity assumptions, the foregoing analysis can be strengthened to give the strong duality theorem, with no duality gap when the constraints of the form hx = 0, as in Section 11.9. Specifically, we consider the problem maximize fx (4) 0 degx ≤ 0 dual) se maximiza con el multiplicador Además, como indica la figura ??, ese subject punto deto crucehx (y el= valor la función de Lagrange que corresponde al plano más alto posible que intercepta el eje vertical, siendo el punto de esa intercepción x∈ menor o igual que el valor óptimo f . La diferencia constituye el gap de dualidad. Si se incorporan suposiciones de convexidad, el análisis que estamos haciendo de completa con el teorema de la where h is affine of dimension m, g is convex of dimension p, and is a convex dualidad fuerte, cuando no hay gap de dualidad y la intersección de esos planos con el eje vertical es el propio f . Esto se puede ver set. en la figura ??. r w (z) f * = ϕ∗ hiperplano óptimo z 14.3 The strong Therefuerte is no. duality Figura 10.28:Fig. Expresión gráfica del duality teorematheorem. de la dualidad No hay gap gap de dualidad. El teorema de la dualidad fuerte lo referimos al problema general minimizar f .x/ n x2R sujeta a h.x/ D 0 g.x/ 0 x 2 ; (4) donde h W Rm ! Rn es afín, g W Rp ! Rn es convexa y es convexo. La función dual de este problema es .; / D Kınf ff .x/ C Th.x/ C Tg.x/ W x 2 g; (5) y D sup f.; / W 2 Rm ; 2 Rp ; 0g. Una función h.x/ es regular con respecto a si el conjunto C D fy W h.x/ D y para algún x 2 g de Rn contiene una bola abierta en torno a 0; es decir, C contiene un conjunto de la forma fy W jyj < "g para algún " > 0. Esto viene a decir que h.x/ puede hacerse 0 y variar arbitrariamente en torno a 0 en cualquier dirección. Teorema 10.3 Teorema de la dualidad fuerte. Supongamos que en el problema (??) h es regular con respecto a y que existe un punto x 2 en el que h.x/ D 0 y g.x/ 0. Supongamos que el problema tiene como solución x con un valor de la función objetivo f .x / D f . Entonces, para todo y todo 0 se cumple que f : Además, existen unos y 0 tales que .; / D f y por lo tanto D f . Los vectores y son los multiplicadores de Lagrange del problema. Como conclusión resumida de lo expuesto sobre dualidad para programación no lineal, se pueden enfrentar los problemas primal y dual como sigue: f D minimizar !.z/ D maximizar ./ Primal Dual sujeta a sujeta a z0 33 0 10.1 Dualidad Lagrangiana Es una forma de denominar lo que acabamos de exponer. La función de Lagrange del problema (??) escrito así minimizar f .x/ n x2R sujeta a h.x/ D 0 (6) g.x/ 0 x 2 ; es La función de Lagrange dual es Th.x/ L.x; ; / D f .x/ Tg.x/: def q.; / D Kınf L.x; ; /: x Si la función objetivo, h.x/ y g.x/ son convexas, con 0 la función de Lagrange es convexa y una cota inferior del valor óptimo de la función objetivo de (??). El problema dual de éste es maximizar q.; / sujeta a 0; que es siempre convexo. 10.2 Dualidad de Wolfe Un poco distinta de las anteriores, especialmente indicada para los métodos de punto interior que se ven en el curso. El problema dual es max. L.x; ; / s. a rx L.x; ; / D 0 0: 10.3 Ejemplo En el caso de un problema de Programación Lineal en forma estándar minimizar cT x n x2R sujeta a T .Ax la función de Lagrange es L.x; ; / D c T x Ax D b x 0; T x, o b/ L.x; ; / D T b C c AT Su problema dual T max. q.; / D Kınf fL.x; ; /g D b C Kınfx s. a 0: n c T A T x: T o x D ( T b 1 si c si c AT AT D0 ¤0 Si c A T ¤ 0 el ínfimo es claramente 1, por lo que hay que excluir del problema aquellos para los que se den esos caos. Por ello, el problema dual queda maximizar T b s. a c AT D 0; El dual de Wolfe sería exactamente el mismo. El gap de dualidad cT x T b D c T x T Ax D x T c 34 0: A T D x T : 11 Bibliografía B ERTSEKAS , D.P. 2003. Convex Analysis and Optimization. Athena Scientific. B OYD , S. Y VANDENBERGHE , L. 2004. Convex Optimization. Cambridge University Press. DE LA F UENTE , J.L. 1998. Técnicas de cálculo para sistemas de ecuaciones, programación lineal y programación entera. Segunda edición. Reverté. H ALMOS , P.R. 1974. Finite-Dimensional Vector Spaces. Springer Verlag. K UHN , H.W. Y T UCKER , A.W. 1951. Nonlinear Programming. Proceedings of the Second Berkeley Symposium on Mathematical Statistics and Probability. University of California Press. Verlag. L UENBERGER , D.G. 1969. Optimization by Vector Space Methods. John Wiley and Sons. L UENBERGER , D.G. Y Y E , Y. 2009. Linear and Nonlinear Programming. Springer Verlag. N OCEDAL , J. Y W RIGHT, S.J. 2006. Numerical Optimization. Springer Verlag. R IAZA , R. Y Á LVAREZ , M. 1996. Cálculo infinitesimal. Vol. I. Sociedad de Amigos de la Escuela Técnica Superior de Ingenieros Industriales de Madrid. R IAZA , R. Y Á LVAREZ , M. 1997. Cálculo infinitesimal. Vol. II. Sociedad de Amigos de la Escuela Técnica Superior de Ingenieros Industriales de Madrid. ROCKAFELLAR , R.T. 1970. Convex Analysis. Princeton University Press. S AUER , T. 2013. Análisis numérico. Segunda edición. Pearson educación. W OLFE , P. 1961. A Duality Theorem for Non-Linear Programming. Quart. Appl. Math. 19, Nı 3. 35



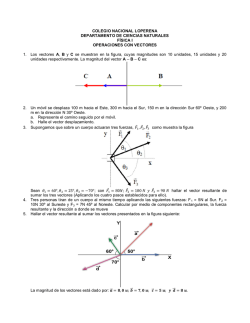



© Copyright 2026