
universidad don bosco facultad de estudios tecnológicos escuela de
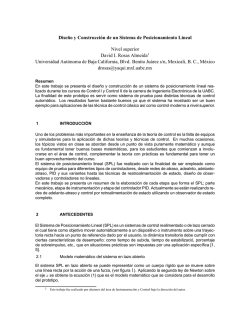
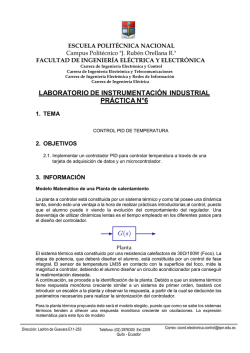
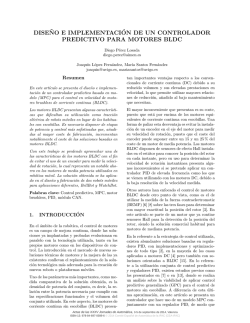
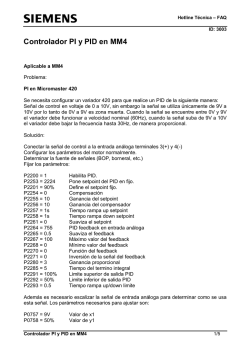
UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS ESCUELA DE ELECTRÓNICA CICLO: 01-2015 GUIA DE LABORATORIO # 9 Nombre de la Práctica: Calibración por el método de Ziegler-Nichols Lugar de Ejecución: Instrumentación y Control (Ed.3, 2a planta). Tiempo Estimado: 2 horas y 30 min. Materia: Instrumentación y Control Analógico. Docentes: William Argueta/José Díaz/ Tania Martínez. I. OBJETIVOS Calibrar los diferentes tipos de controladores en un punto óptimo de estabilidad y velocidad por el método de Ziegler-.Nichols II. INTRODUCCIÓN TEÓRICA Calibración de Controladores. El proceso de seleccionar los parámetros del controlador para que el sistema cumpla con las especificaciones de diseño se conoce como calibración o ajuste del controlador. Las reglas de Ziegler-Nichols sugieren un método para afinar controladores PID basándose en la respuesta experimental ante una señal escalón de entrada. La regla de Ziegler-Nichols es muy conveniente cuando no se conocen los modelos matemáticos de las plantas. La respuesta de salida de sistemas de orden superior, por lo general, ante un escalón y en lazo abierto es una curva en forma de S que puede caracterizarse por dos parámetros: el tiempo muerto TU y la constante de tiempo Tg. El tiempo muerto o de atraso y la constante de tiempo se determinan trazando una línea tangente a la curva en forma de S en el punto de inflexión y se encuentran las intersecciones de esta línea tangente con el eje del tiempo y con la línea c(t) = K . Ziegler-Nichols sugiere fijar los valores de Kp , TN y TV de acuerdo a la siguiente tabla: Tipo de controlador KP TN TV P Tg/(TuKS) ∞0 0 PI (0.9Tg)/(TuKS) Tu/0.3 0 PID (1.2Tg)/(TuKS) 2Tu 0.5Tu Tabla 9.1. Método de calibración de controladores de Ziegler-Nichols. III. MATERIALES Y EQUIPO 1 Fuente de alimentación +/-15 VDC [SO3538-8D]. 1 Referencia de voltaje [SO3536-5A]. 1 Control PID [SO3536-6B] Ciclo I2015. 1 Amplificador de potencia [SO3536-7Q]. 1 Sistema controlado de temperatura [SO3536-8T]. 1 Módulo con bomba [SO3536-9H] 1 Sistema de control de nivel [SO3536-9K] 1 Computadora con Run Intuilink Data Capture instalado. 1 Osciloscopio digital [DSO1052B]. 2 Puntas para el osciloscopio. 1 Cable USB tipo A/B. 20 Puentes. 1 Switch. 6 Cables de conexión Lucas Nülle. IV. PROCEDIMIENTO PARTE I CALIBRACIÓN DE UN CONTROLADOR PID CON EL MÉTODO DE ZIEGLER NICHOLS DE LAZO ABIERTO. 1. Si tiene asignado como planta el sistema térmico siga con el paso 10, si es el sistema hidráulico continúe con el paso 2. Sistema Hidráulico 2. Arme el sistema hidráulico a lazo abierto de la Figura 9.1. Coloque todos los controles en cero, deshabilite los controles I y D del módulo PID (colocando los interruptores AB(D) y AB(I) hacia arriba) y abra el SWITCH 1. Figura 9.1. Sistema hidráulico a lazo abierto ______________________________________________________________________________ Instrumentación y Control Analógico. Ciclo I2015. 3. Coloque la perilla de la válvula de entrada del tanque abierta por arriba. (Punto verde arriba y rojo abajo) y la de la válvula de salida abierta en el mínimo. (Girar la perilla en el sentido de las agujas del reloj y deje al frente el primer punto verde que sigue al rojo). y haga los siguientes ajustes: Voltaje de referencia: ▪ W = 50% Controlador PID: ▪ KP = 2 ▪ TN = deshabilitado (al mínimo) ▪ TV = deshabilitado (al mínimo) 4. Introduzca en el tanque la división que se muestra en la Figura 9.2 para convertirlo en una planta de orden superior, la parte de los orificios más pequeños debe quedar en la parte inferior del tanque. Figura 9.2. Vista de planta de la división de orden superior. 5. Calibre el cero del transductor de presión/voltaje.. 6. Coloque en el osciloscopio los siguientes ajustes: ▪ Escala de tiempo: 10.00 s/ ▪ Referencia de voltaje: Penúltima linea horizontal de la pantalla ▪ Inicio de la graficación: Primera línea vertical de la pantalla ▪ Escala de voltaje canal 1: 2.00V/ ▪ Escala de voltaje canal 2: 2.00V/ ▪ Persistencia: Infinito 7. Conecte el canal 1 del osciloscopio a la salida del módulo “Amplificador de potencia” y el canal 2 a la salida del “transductor presión/voltaje” y obtenga la gráfica de respuesta del sistema, cuando ya esté estable la presión detenga la graficación y guarde la gráfica en la computadora. 8. Abra el SWITCH 1 para que se vacíe el tanque. 9. Siga con el paso 14. Sistema Térmico 10. Arme el sistema térmico a lazo abierto de la Figura 9.3. Coloque todos los controles en cero, deshabilite los controles I y D del módulo PID (colocando los interruptores AB(D) y AB(I) hacia arriba) y abra el SWITCH 1. ______________________________________________________________________________ Instrumentación y Control Analógico. Ciclo I2015. Figura 9.3 Sistema térmico a lazo abierto. 11. Realice los siguientes ajustes: Voltaje de Referencia: ▪ W = 100%. Controlador PID: ▪ KP = 1 ▪ TN = deshabilitado (al mínimo). ▪ TV = deshabilitado (al mínimo). Osciloscopio: ▪ Escala de tiempo: 10.00 s/ ▪ Referencia de voltaje: Penúltima linea horizontal de la pantalla ▪ Inicio de la graficación: Primera línea vertical de la pantalla ▪ Escala de voltaje canal 1: 2.00V/ ▪ Escala de voltaje canal 2: 2.00V/ ▪ Persistencia: Infinito 12. Conecte el canal 1 del osciloscopio a la salida del módulo “Amplificador de potencia” y el canal 2 a la salida del “transductor temperatura/voltaje” y obtenga la gráfica de respuesta del sistema y cuando ya esté estable la temperatura detenga la graficación y guarde la gráfica en la computadora. 13. Abra el SWITCH 1 y deje que el sistema vuelva a la temperatura ambiente. 14. En la gráfica obtenida, indique el punto de inflexión en la respuesta transitoria y trace una recta tangente a ese punto, a continuación mida el tiempo muerto, la constante de tiempo y la ganancia del sistema como se indica en la siguiente Figura 9.4 ______________________________________________________________________________ Instrumentación y Control Analógico. Ciclo I2015. Figura 9.4. Determinación de TU ,Tg y KS de la respuesta de la planta a lazo abierto. 15. Calcule la ganancia proporcional y los tiempos de acción integral y de duración predicha para el controlador PID como se muestra en la Tabla 9.1 de la introducción teórica. KP = _____________, TV = _____________ y TN = ____________, 16. Cierre el lazo de control y calibre el controlador PID con estos valores, (no olvide activar los interruptores AB(I) y AB(D) del controlador PID) y obtenga la gráfica de respuesta del sistema. Deje que se estabilice el sistema y luego aplique una perturbación (guarde esta gráfica en la computadora) ¿Según la gráfica obtenida que concluye acerca de la calibración del controlador PID que realizó? ________________________________________________________________________ 17. Reduzca al mínimo las perillas tanto del voltaje de referencia (SET POINT) como todas las del controlador PID (KP, TV(s) y TN(s) y las de sus respectivas escalas) también coloque hacia arriba los interruptores AB(I) y AB(D) del controlador PID , apague los equipos y desconecte el sistema. V. ANALISIS DE RESULTADOS 1. Presente las respuestas a las preguntas realizadas a lo largo del procedimiento 2. ¿Es este método de calibración 100% confiable con cualquier tipo de sistema? 3. ¿Cuáles a su criterio son los beneficios de controlar con PID? VI. INVESTIGACIÓN COMPLEMENTARIA • • • Investigue sobre otros métodos de calibración PID. Investigue acerca de controladores PID Industriales. Investigue qué es la autosintonía en los controladores digitales de procesos. VII. BIBLIOGRAFÍA • INGENIERÍA DE CONTROL MODERNA. Tercera Edición. Prentice Hall. Katsuhiko Ogata, Biblioteca UDB, Clasificación: Libro interno 629.8 O34 1998 • SISTEMAS DE CONTROL AUTOMÁTICO. Séptima Edición. Prentice Hall. Benjamín Kuo, Biblioteca UDB, Clasificación: 621.3811 K95 1996. ______________________________________________________________________________ Instrumentación y Control Analógico.





© Copyright 2026