
Control PID de Temperatura - Escuela Politécnica Nacional
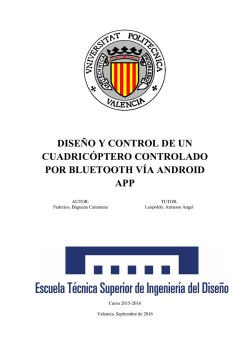
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones Carrera de Ingeniería Electrónica y Redes de Información Carrera de Ingeniería Eléctrica LABORATORIO DE INSTRUMENTACIÓN INDUSTRIAL PRÁCTICA N°6 1. TEMA CONTROL PID DE TEMPERATURA 2. OBJETIVOS 2.1. Implementar un controlador PID para controlar temperatura a través de una tarjeta de adquisición de datos y un microcontrolador. 3. INFORMACIÓN Modelo Matemático de una Planta de calentamiento La planta a controlar está constituida por un sistema térmico y como tal posee una dinámica lenta, siendo esto una ventaja a la hora de realizar prácticas introductorias al control, puesto que el alumno puede ir viendo la evolución del comportamiento del regulador. Una desventaja de utilizar dinámicas lentas es el tiempo empleado en los diferentes pasos para el diseño del controlador. El sistema térmico está constituido por una resistencia calefactora de 30Ω/100W (Foco). La etapa de potencia, que deberá diseñar el alumno, está constituida por un control de fase integral. El sensor de temperatura LM35 en contacto con la superficie del foco, mide la magnitud a controlar, debiendo el alumno diseñar un circuito acondicionador para conseguir la realimentación deseada. A continuación, se procede a la identificación de la planta. Debido a que un sistema térmico tiene respuesta monótona creciente similar a un sistema de primer orden, bastará con introducir un escalón a la planta y observar la respuesta, a partir de la cual se deducirán los parámetros necesarios para realizar la sintonización del controlador. Para la planta térmica propuesta éste será el modelo elegido, puesto que como se sabe los sistemas térmicos tienden a ofrecer una respuesta monótona creciente sin oscilaciones. La expresión matemática para este tipo de modelo Dirección: Ladrón de Guevara E11-253 Teléfono: (02) 2976300 Ext.2209 Quito - Ecuador Correo: [email protected] 𝐺(𝑠) = Donde: K es la ganancia del proceso td el tiempo de retardo τ la constate de tiempo. Con fines prácticos será k=4.45 𝐾 . 𝑒 −𝑡𝑑 𝑠 𝜏. 𝑠 + 1 𝑡𝑑 =8 𝜏 =350 CONTROL PID Control proporcional Para poder controlar la temperatura con menos fluctuaciones, se debe poder entregar al horno una potencia gradual, en la medida requerida para mantenerlo a la temperatura deseada. En el ejemplo anterior del control ON/OFF, el relé del mando de calentamiento estará activado 100%, entregando el máximo de potencia al horno o bien desactivado sin entregar potencia. El controlador proporcional entrega una potencia que varía en forma gradual entre 0 y 100% según se requiera y en forma proporcional al error (SP-PV). Lo más natural para entregar una potencia que varía de 0% a 100% en forma continua seria usar un horno a petróleo o gas y que el control module la potencia mediante la llave de paso del combustible. La llave cerrada seria 0% de potencia y la llave totalmente abierta seria 100%. Control Proporcional Derivativo PD Un control PD es uno proporcional al que se le agrega la capacidad de considerar también la velocidad de la temperatura en el tiempo. De esta forma se puede "adelantar" la acción de control del mando de salida para obtener así una temperatura más estable. Si la temperatura está por debajo del SP, pero subiendo muy rápidamente y se va a pasar de largo el SP, entonces el control se adelanta y disminuye la potencia de los calefactores. Al revés si la temperatura es mayor que el SP, la salida debería ser 0% pero si el control estima que la temperatura baja muy rápido y se va pasar para abajo del SP, entonces le coloca algo de potencia a la salida para ir frenando el descenso brusco. Control Proporcional Integral PI La forma efectiva de solucionar el problema del error estacionario es agregando al control proporcional el término "Integral" llamado también a veces "automatic reset" o "reset action", nosotros lo llamaremos "acción integral". El control será el mismo proporcional, pero a la salida se le suma la acción integral, que la corrige tomando en cuenta la magnitud del error y el tiempo que este ha permanecido. Para ello se le programa al control una constante I, que es formalmente "la cantidad de veces que aumenta la acción proporcional por segundo". La salida se corrige en una cantidad equivalente a la integral del error. El control Proporcional, Integrativo, Derivativo PID Acción de PID que combina con la acción proporcional, la acción integral, la acción derivativa es ideal para aplicaciones sensibles de temperatura. La acción proporcional salida se desactiva en proporcional a la desviación de la temperatura actual versus la temperatura prefijada. La acción de la derivación acorta el tiempo que toma la temperatura para estabilizarse y acercarse al valor prefijado. La acción integral elimina cualquier desplazamiento fuera del valor de la temperatura prefijado. Dirección: Ladrón de Guevara E11-253 Teléfono: (02) 2976300 Ext.2209 Quito - Ecuador Correo: [email protected] Matemáticamente un controlador PID se encuentra expresado por: 𝐶(𝑠) = 𝐾𝑝 (1 + 1 + 𝑇𝑑 𝑆) 𝑇𝑖 𝑆 4. TRABAJO PREPARATORIO 4.1. 4.2. 4.3. 4.4. Consultar y detallar el funcionamiento y características del Toolkit de Labview PID y sus derivados. Describir los métodos de calibración de constantes en controladores PID En base a la información anterior, diseñar un controlador P, PI o PID para el modelo de la planta propuesto que sea capaz de controlar de manera eficiente la temperatura. Presentar la respuesta del sistema a una señal paso para comprobación de su efecto. Diseñar un programa para Labview que adquiera la señal de temperatura de un LM35 a través de la DAQ, con dicha señal implementar un PID (Utilizando el toolkit PID de labview) que entregue una salida de control de 0 a 5V (salida analógica) que será enviada a un microcontrolador el cual controlará el conversor AC/AC cuya carga es un foco de 110V (Práctica 5 control de fase directo). Figura 1: Esquema del sistema a ser implementado 4.5. Traer acoplado al LM35 cables largos para poder sensar la temperatura del foco. 5. EQUIPO Y MATERIALES Fuente DC Foco 100W DAQ Microcontrolador LM35 Dirección: Ladrón de Guevara E11-253 Teléfono: (02) 2976300 Ext.2209 Quito - Ecuador Correo: [email protected] 6. PROCEDIMIENTO 6.1. 6.2. Probar los programas solicitados para el microcontrolador y LabView. En el laboratorio se probará el funcionamiento del sistema con diferentes constantes del PID hasta tener una respuesta del sistema adecuado. 7. INFORME 7.1. 7.2. 7.3. 7.4. 7.5. 7.6. Descripción y funcionamiento del sistema implementado. Presentar el programa y el VI final desarrollado en la práctica. Presentar el circuito final desarrollado en la práctica. Consulte 3 procesos industriales que involucren el control de temperatura mediante un controlador PID. Conclusiones y Recomendaciones Bibliografía. Responsable: Ing. Luis Morales, MSc Revisado por: Ing. Luis Morales., MSc Dirección: Ladrón de Guevara E11-253 Teléfono: (02) 2976300 Ext.2209 Quito - Ecuador Correo: [email protected]


© Copyright 2026