
Fast Stereovision by Coherence Detection
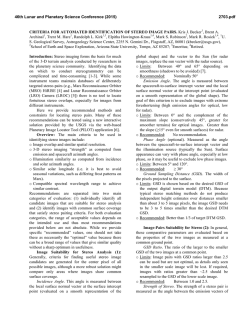
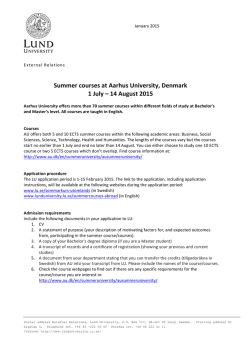
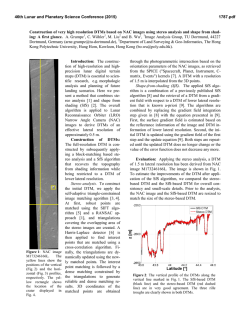
Fast Stereovision by Coherence Detection R.D. Henkel Institute of Theoretical Neurophysics, University of Bremen Postfach 330 440 D-28334 Bremen, Germany Email: [email protected] Abstract In human stereovision, a vivid sensation of depth is created by the small relative displacements of objects in the retinal images of the left and right eye. Utilizing only two di erent views of a scene, the range of disparities which simple disparity units can estimate is severely limited by aliasing e ects. A new computational approach to stereo vision utilizes these aliasing e ects in a coherence detection scheme to allow the calculation of dense disparity maps over a large range of disparities with plausible biological hardware. The fast, non-iterative algorithm creates within a single network structure simultaneously a disparity map exhibiting hyperacuity, a veri cation count of the disparity data and fuses the left and right input images to the cyclopean view of the scene. 1 Introduction The structure of 3D-space is hidden in the small relative displacements between the left and right view of a scene (disparities). Beside the small displacements of image parts, numerous other image variations occur between the two stereo views, making the reliable computation of disparities a nontrivial problem. Sensor noise and di erent transfer functions of the left and right imaging system introduce stochastic signal variations, whereas the varying view geometry leads to a variety of systematic image variations, including occlusion e ects and foreshortening. In addition, since most object surfaces in real-world scenes display specular re ection, the intensities observed by the imaging systems are not directly correlated with the object surfaces, but nearly always have a viewpoint dependent component which moves independently of the surface in question. Classical approaches to stereo vision try to counteract this whole set of distorting signal variations with two basic algorithmic paradigms, known as feature- and as area-based approaches 1]. In feature-based stereo algorithms, the intensity data is rst converted to a set of features assumed to be a more stable image property than the raw intensities. The matching stage operates only on these extracted image features. In contrast, area-based approaches compare directly intensity values within small image patches of the left and right view, and try to maximize the correlation between these patches. To assure stable performance, area-based stereo algorithms need suitably chosen correlation measures and a su ciently large patch size. Both types of stereo algorithms create computational problems which can be directly attributed to the basic assumptions inherent in these approaches. For example, only a few speci c feature-classes are generally utilized in feature-based algorithms. Therefore most areas of the stereo images end up in the \no feature present"-class, which is not considered further in the matching process. This leads to a tremendous data reduction which speeds up processing, but makes it impossible to calculate disparity estimates for most of the image regions. In order to obtain dense disparity maps, one is forced to interpolate these missing values. To complicate matters further, every feature detected in the left image can potentially be matched with every feature of the same class in the right image. This is the classical \false matches"-problem, which is basic to all feature-based stereo algorithms. The problem can only be solved by the introduction of additional constraints to the nal solution of the matching problem. These constraints are usually derived from reasonable assumptions about the physical properties of object surfaces, and rule out certain combination of matches. Classical constraints include the uniqueness of a match, gural continuity and the preserved ordering of matches along horizontal scanlines 2]. In conjunction with the features extracted from the images, constraints de ne a complicated error measure which can be minimized by direct search techniques or through cooperative processes. The problems inherent to feature-based stereo algorithms can simply be reduced by increasing the number of features classes considered in the matching process. In the extreme case, one might utilize a continuum of feature-classes. For example, the locally computed Fourier phase can be used for classifying local intensity variations into feature-classes indexed by the continuous phase value 3]. Using such a continuum of feature-classes, with the feature index derived from some small image area, is very similar to standard area-based stereo algorithms. In these algorithms, not only a single feature value, but the full vector of image intensities over a small image patch is used for matching. Classical area-based approaches minimize the deviation or maximize the correlation between patches of the left and right view. A large enough patchsize assures a stable performance (via the central-limit theorem). The computation of the correlation measure and the subsequent maximization of this value turns out to be a computationally expensive process, since extensive search is required in con guration space. This problem is usually solved within hierarchical approaches, where disparity data obtained at coarse spatial scales is used to restrict searching at ner scales. However, for generic image data there is no guarantee that the disparity information obtained at the coarse scales is valid. The disparity estimate might be wrong, might have a di erent value than at ner scales, or might not be present at all. Thus hierarchical approaches will fail under various circumstances. A third way for calculating disparities is known as phase-based methods 4, 5]. These approaches derive Fourier-phase images from the raw intensity data. Extraction of the Fourier phase can be considered as a local contrast equalization reducing the e ects of many intensity variations between the two stereo views. Algorithmically, these approaches are in fact gradient-based op2 optical flow ϕ disparity calculations ϕ ϕ t0 Left t1 Right 1 t2 t t correct Right 2 t correct wrong Figure 1: The velocity of an image patch manifests itself as the main texture direction in the space-time ow eld traced out by the intensity pattern in time (left). Sampling such ow patterns at discrete time points can create aliasing e ects which lead to wrong estimates if the velocity of the ow is too fast (right). Using optical ow estimation techniques for disparity calculations, this problem is always present, since only the two samples obtained from the left and right eye are available for ow estimation. tical ow methods, with the time-derivative approximated by the di erence between the left and right Fourier-phase images 6]. The Fourier phase exhibits wrap-around, making it again necessary to employ hierarchical methods | with the already discussed drawbacks. Furthermore, additional steps have to be taken to ensure the exclusion of regions with ill-de ned Fourier phase 7]. The new approach to stereo vision presented in this paper rests on simple disparity estimators which also employ classical optical ow estimation techniques. However, essential to the new approach are aliasing e ects of these disparity units in connection with a simple coherence detection scheme. The new algorithm is able to calculate dense disparity maps, veri cation counts and the cyclopean view of the scene within a single computational structure. 2 Coherence Based Stereo The estimation of disparity shares many similarities with the computation of optical ow. But having available only two discrete \time"-samples, namely the images of the left and right view, creates an additional problem in disparity estimation. The discrete sampling of visual space leads to aliasing e ects which limit the working ranges of simple disparity detectors. For an explanation consider Figure 1. If a small surface patch is shifted over time, the intensity pattern of the patch traces out a corresponding ow pattern in spacetime. The principal texture direction of this ow pattern indicates the velocity of the image patch. It can be estimated without di culty if the intensity data for all time points is available (Fig. 1, left). Even if the ow pattern can not be sampled continuously, but only at some discrete time points, the shift can be estimated without ambiguity if this shift is not too large (Fig. 1, middle). However, if the shift between the two samples exceeds a certain limit, this becomes impossible (Fig. 1, right). The wrong estimates are caused by simple aliasing in the \time"-direction; an everday example of this e ect is sometimes 3 seen as motion reversal in movies. To formalize, let IL (') be the image intensity of a small patch in the left view of a scene with corresponding Fourier transform IL (k'). Moving the left camera on a linear path to the position of the right camera, we obtain a local ow- eld very similar to Figure 1, namely: I ('; ) = IL (' + d ). Here d is the disparity of the image patch and the shift parameter runs from 0 to 1. The Fourier transform of I ('; ) follows from elementary calculus as I (k' ; k ) = IL (k' ) (k ? dk'). Now, if the spectrum of IL (k' ) is bounded by ' , i.e. if IL (k ' ) = 0 for jk ' j > k ' , we nd some maximum wavevector kmax max ' . as highest wavevector of the ow eld I (k' ; k ) in -direction kmax = dkmax However, the maximal representable wavevector in this direction is given by sampling theory as kmax = = . Since sampling in -direction is done with a step size of = 1, we obtain as an upper bound for sampling the ow eld without aliasing e ects (1) jdj < k' = 12 'min : max Equation (1) states that the range of reliable disparities estimates for a simple detector is limited by the largest wavevector present in the image data. This size-disparity scaling is well-known in the context of spatial frequency channels assumed to exist in the visual cortex. Cortical cells respond to spatial frequencies up to about twice their peak wavelength opt , therefore limiting the range of detectable disparities to values less than 1=4 opt . This is known as Marr's quarter-cycle limit 8, 9]. Since image data is usually sampled in spatial direction with some xed re' which can be present in the ceptor spacing ', the highest wavevector kmax ' data after retinal sampling is given by kmax = = '. This leads to the requirement that jdj < ' | without additional processing steps, only disparities less than the receptor spacing can be estimated reliably by a simple disparity unit. Equation (1) immediately suggests a way to extend the aliasing limited working range of disparity detectors: spatial pre ltering of the image data before or ' , and in turn increases the disparduring disparity calculation reduces kmax ity range. In this way, larger disparities can be estimated, but only with the consequence of reducing simultaneously the spatial resolution of the resulting disparity map. Another way of modifying the disparity range is the application of a preshift to the input data of the detectors before the disparity calculation. However, modi cation of the disparity range by preshifting requires prior knowledge of the correct preshift to be applied, which is a nontrivial problem. One could resort again to hierarchical coarse-to- ne schemes by using disparity estimates obtained at some coarse spatial scale to adjust the processing at ner spatial scales, but the drawbacks inherent to hierarchical schemes have already been elaborated. Instead of counteracting the aliasing e ects discussed, one can utilize them within a new computational paradigm. Basic to the new approach is a stack of simple disparity estimators, all responding to a common view direction, with each unit i having some preshift or presmoothing applied to its input data. Such a stack might even be composed of di erent types of disparity units. Due to random preshifts and presmoothing, the units within the stack will have 4 di erent and slightly overlapping working ranges of reliable disparity estimates, max Di = dmin i ; di ]. If an object seen in the common view direction of the stack has true disparity d, the stack will be split by the stimulus into two disjunct classes: the class C of detectors with d 2 Di for all i 2 C , and the rest of the stack, C , where d 62 Di . All disparity detectors 2 C will code more or less the true disparity di d, but the estimates of detectors belonging to C will be subject to random aliasing e ects, depending in a complicated way on image content and speci c disparity ranges Di of the units. Thus, we will have di d dj whenever units i and j belong to C , and random values otherwise. A simple coherence detection within each stack, i.e. searching for all units with di dj and extracting the largest cluster found will be su cient to single out C . The true disparity d in the common view direction of the stack can be estimated as an average over the detected cluster: d hdi ii2C : The coherence detecting scheme has to be repeated for every view direction and leads to a fully parallel algorithm for disparity calculation. Neighboring disparity stacks responding to di erent view directions estimate disparity independently from each other. Since coherence detection is based on analyzing the multi-unit activity within a stack, the scheme turns out to be extremely robust against single-unit failure. As long as the density of disparity estimators remains high enough along a speci c view direction, no substantial loss of network performance will be noticed. 3 Computational Structure A computational structure realizing coherence-based stereo is quite simple (Figure 2). Arranging identical disparity units into horizontal disparity layers, left and right image data is fed into the network of disparity layers along diagonally running data lines. Thus each disparity layer receives the stereo data with a certain xed preshift applied. This varying preshift between disparity layers leads to slightly di erent working-ranges of neighboring layers. Disparity units stacked vertically above each other are collected into the disparity stacks which are analyzed for coherently coding subpopulations of disparity units. In most of the simulations reported below, responses of two disparity units i and j in a given stack are marked as coherent with each other whenever jdi ? dj j < = 0:3 ? 0:5. Only the largest cluster found in each stack is read out by the coherence mechanism. This type of coherence detection can be realized easily with biological hardware, for example with neuronally implemented limit-cycle oscillators 10]. Assuming appropriate links structures, these neural oscillators will synchronize their responses, but only if they code approximately the same stimulus value 11]. A valid disparity estimate would show up in such a network as a strong coherent neuronal signal. For the disparity estimators, various circuitry can be used. In the simulations reported below, units based on motion-energy ltering 12, 13, 14], units based on standard optical ow estimation techniques 6] and units based on algorithms 5 disparity planes far 0 near left data ϕ right data disparity data ϕR L Figure 2: The network structure for calculating stereo by coherence detection. Simple disparity estimators are arranged in horizontal layers, which have slightly overlapping working ranges. Image data is fed into the network along diagonal running data lines. Within each of the vertical disparity stacks, coherently coding subpopulations of disparity units are detected, and the average disparity value of these pools is nally read out by the mechanism. for the estimation of principal texture direction 16] were utilized. All these disparity estimators can be realized by simple spatial lter operations combined with local nonlinearities; at least the units based on motion-energy ltering are currently discussed as models for cortical processing by complex cells. The structure of the new network resembles super cially earlier cooperative schemes used to disambiguate false matches 8, 15], but the dynamics and the link structures of the new network are quite di erent. In the new scheme, the disparity stacks do not interact with each other; thus no direct spatial facilitation of disparity estimates is taking place. Such a spatial facilitation is a central ingredient of almost all other cooperative algorithms. Some small spatial facilitation enters coherence-based stereo only through the spatially extended receptive elds of the elementary disparity units used. Interaction in the coherence detection occurs only along the lines de ning the disparity stacks. Essentially, this interaction is of the excitatory type, while usual cooperative schemes have either none or inhibitory interactions along such lines. Furthermore, coherence detection is a fast and non-iterative process, whereas classical cooperative algorithms require many iterations before approaching some steady state. Finally, the disparity units in classical cooperative schemes are basically binary units, indicating the existence or non-existence of a possible match. In coherence-based stereo, the disparity units are disparity estimators, giving back a guess of what value the correct disparity might have. For this reason, the disparity maps obtained by classical cooperative schemes and by the new coherence-based stereo algorithm have a very di erent quality: classical schemes return integer-valued maps, whereas the maps obtained with the new scheme have continuous values, displaying hyperacuity (i.e. sub-pixel precision). Since coherence detection is an opportunistic scheme, extensions of the neu6 A B Figure 3: The performance of coherence-based stereo on classical testimages. A) The Pentagon. The overpasses are recovered well in the disparity map, and also some of the trees in the center of the building are visible. B) Renault automobile part. Even for the relative structureless background a good disparity estimate could be obtained. Both disparity maps were calculated with an input image size of 256x256 pixels. ronal network to multiple spatial scales and to combinations of di erent types of disparity estimators is trivial. Additional units are simply included in the appropriate coherence stack. The coherence scheme will combine only the information from the coherently acting units and ignore the rest of the data. For example, adding units with asymmetric receptive elds 17] will result in more precise disparity estimates close to object boundaries. Presumably, this is the situation in a biological context: various disparity units with rather random properties are grouped into stacks responding to common view directions. The coherence-detection scheme singles out precisely those units which have detected the true disparity. The responses of all other units are ignored. 4 Results Figure 3 shows some results calculated with the new algorithm on two classical testimages. Data from several spatial scales was combined in each disparity stack to yield the nal disparity maps. The results obtained with coherencebased stereo on these standard testimages are comparable to usual area-based approaches. The resulting disparity maps are dense with clearly de ned object 7 A B C D E F G Figure 4: When enough image detail is present, disparity is estimated by the new algorithm with subpixel precision (E). In other image areas, a low a veri cation count (F) indicates unreliable estimates. This can be used to mask unreliable data (G). A simple superposition of the left and right input pictures displays double contours (C), but the coherence detection scheme is able to fuse both stereo pictures to the cyclopean view of the scene (D). Note the change of perspective between the left and right input image and the cyclopean view. borders. Within the new coherence-based stereo algorithm, a simple veri cation count can be derived from the relative number of coherently acting disparity units in each stack, i.e. by calculating the ratio N (C )=N (C C ), where N (C ) is the number of units in class C . The veri cation count can be used to mark unreliable estimates. Arti cial stimuli, as well as images taken in technical context, are sometimes composed of large structureless regions. In those areas where the sensor noise is stronger than the intensity variation correlated with the object surfaces, a reliable estimation of disparities becomes impossible (parts of Figure 4E). With coherence-based stereo, these areas can be detected by a low veri cation count (Figure 4F). Using the veri cation count for masking all unreliable disparity estimates, coherence-based stereo can mimic a standard feature-based algorithm when confronted with di cult data (Figure 4G). However, in contrast to classical feature-based approaches, none of the usual constraints basic to feature-based algorithms are explicitly build into the coherence detecting network. Also, with coherence-based stereo, disparity estimates will be obtained in all image areas with su cient structure, regardless of the type of features present there. This is not the case with classical feature-based algorithms, where one gets estimates only in image regions with the preselected type of features. As Figures 4E-G show in comparison to Figures 4A-B, the maps which are output by the coherence-based stereo algorithm are neither aligned with the left nor with the right view of the scene. This is a direct result of the network structure used (cmp. Figure 2). The diagonally running data lines in the network correspond to the lines of sight from the left and right eye positions, but the coherence detection is done within the vertical disparity stacks of the network. 8 A B C Figure 5: The new scheme works well with very di erent source images. A) Filling-in occurs in sparse random-dot-stereograms from coarser spatial channels (top: stereo pair with 3% black dots, bottom right: true disparity, bottom left: calculated disparity). B) Images without any localized image-features are also handled well. C) Dense disparity maps are obtained for image data of natural scenery, which usually has su cient detail for disparity estimation in all image areas. The links de ning these stacks split the angle between the left and right data lines in half. Reprojecting data lines and coherence-detecting links back into 3D-space shows that the disparity stacks actually analyze the image data along view lines splitting the angle between left and right view directions in half, i.e., along the cyclopean view direction. Therefore, any data which is output by the coherence-based stereo algorithm is aligned with the cyclopean view of the scene. It is very easy to obtain the cyclopean view of the scene itself. Let IiL and R Ii be the left and right input data of disparity unit i, respectively. A simple summation over all coherently coding disparity units, I C = IiL + IiR i2C ; gives the image intensities of the cyclopean view (Figure 4D). Interestingly, the image constructed in this way is not severely distorted even in areas where the disparity estimate is poor. Note that the fusion of left and right input image to the cyclopean view is not an interpolation between the left and right image data. This can be seen by observing the change in perspective between the calculated cyclopean view and the left and right input images. The simple superposition of both stereo images (Figure 4C) displays in addition double contours which are absent in the cyclopean view. Coherence-based stereo works equally well with very di erent source images. In its multi-scale version, the coarser spatial channels interpolate disparity values at ner spatial channels when no estimate can be obtained there. Figure 5A displays results of a disparity calculation with a random-dot stereogram having only a pixel density of 3%. Due to lling-in, the true disparity map is recovered to a large extent even in image areas with no detail. In contrast to other cooperative schemes, the lling-in occurs in coherence-based stereo instantaneously; 9 no iterative re nement or propagation of disparity values is necessary as with other approaches. As already mentioned, various types of disparity estimators can be used within the basic algorithm. Fig. 5B shows results obtained with a disparity unit based on an algorithm for the estimation of principal texture direction. Classical feature-based stereo algorithms would fail with this stimulus set, since the stereo data lacks any localized images features 18]. Finally, in Fig. 5C, a disparity map obtained from an outdoor scene is shown. Natural imagery usually has su cient detail present in all image areas and at all spatial scales, so dense and stable disparity maps can be obtained with the coherence-based stereo algorithm. Acknowledgements Fruitful discussions and encouraging support from H. Schwegler is acknowledged. Image data is supplied by Gerard Medioni, USC Institute for Robotics and Intelligent Systems (Image 3B), the Kiel Cognitive Systems Group, G. Sommer, Christian-Albrechts-University of Kiel (Fig 4), by the Max-Planck-Institute for Biological Cybernetics, AG Bultho , (Fig 5B), and Bob Bolles, AIC, SRI International (Fig 5C). References 1] U. R. Dhond and J. K. Aggarwal, Structure from Stereo - A Review, IEEE Trans. Syst., Man and Cybern. 19, 1489{1510, 1989. 2] J. P. Frisby, Stereo Correspondence and Neural Networks, in \Handbook of Brain Theory", ed. M. A. Arbib, 937{941, MIT Press 1995. 3] J. Weng, Image Matching Using the Windowed Fourier Phase, Int. J. of Comp. Vis. 3, 211{236, 1993. 4] T.D. Sanger, Stereo Disparity Computations Using Gabor Filter, Biol. Cybern. 59, 405{418, 1988. 5] M. R. M. Jenkin and A. D. Jepson, Recovering Local Surface Structure through Local Phase Di erence Methods, CVGIP 59, 72{93, 1994. 6] J. L. Barron, D.J. Fleet and S. S. Beauchemin, Performance of Optical Flow Techniques, Int. J. Comp. Vis. 12, 43{77, 1994. 7] D.J. Fleet and A. D. Jepson, Stability of Phase Information, IEEE Trans. Patt. Anal. Mach. Intel. 15, 1253{1268, 1993. 8] R. Blake and H. R. Wilson, Neural Models of Stereoscopic Vision, TINS 14, 445{452, 1991. 9] D. Marr and T. Poggio, A Computational Theory of Human Stereo Vision, Proc. R. Soc. Lond. B 204, 301{328, 1979. 10] H. R. Wilson and J. D. Cowan, Excitatory and inhibitory interactions in localized populations of model neurons, Biophys. J. 12, 1{24, 1972. 10 11] R.D. Henkel, Segmentation in Scale Space, in: "Computer Analysis of Images and Pattern, CAIP '95 Proceedings", LNCS 970, 41{48, Springer 1995. 12] N. Qian and Y. Zhu, Physiological Computation of Binocular Disparity, to appear in Vision Research '97. 13] G. C. DeAngelis, I. Ohzawa, and R. D. Freeman, Depth is Encoded in the Visual Cortex by a Specialized Receptive Field Structure, Nature 11, 156{159, 1991. 14] E. H. Adelson and J. R. Bergen, Spatiotemporal Energy Models for the Perception of Motion, J. Opt. Soc. Am. A 2, 284{299, 1985. 15] K. Prazdny, Detection of Binocular Disparities, Biol. Cybern 52, 93{99, 1985. 16] J. Bigun, G. H. Granlund and J. Wiklund, Multidimensional Orientation Estimation with Application to Texture Analysis and Optical Flow, IEEE Trans. Patt. Anal. and Mach. Intl. 13, 775{790, 1991. 17] A. Fusiello, V. Roberto, and E. Trucco, A Symmetry-based Stereo Algorithm, Research report udmi/53/96/rr, submitted to CVPR 97, Machine Vision Lab, University of Udine, Italy, 1996. 18] P. A. Arndt, HP. A. Mallot, H. H. Bultho , Human stereovision without localized image features, Biol. Cybern. 72, 279{293, 1995. 11


© Copyright 2026