
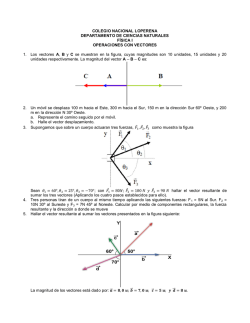
1. OPERACIONES CON VECTORES 1.1 Magnitudes
1. Operaciones con Vectores Análisis y Predicción del Tiempo 1. OPERACIONES CON VECTORES 1.1 Magnitudes Fundamentales, Unidades y Tiempo En meteorología existen cuatro magnitudes físicas fundamentales: longitud (m), masa (kg), tiempo (en sentido cronológico –s–) y temperatura (K). En general se empleará el Sistema Internacional (SI) siempre, aunque existen algunas excepciones que, por tradición, emplean otro tipo de unidades. Así, por ejemplo, es común emplear unidades de tiempo superiores al segundo como minutos, horas y días ya que los procesos en la atmósfera suelen emplear tiempos muy superiores al segundo. También está muy extendido el empleo del milibar (mb) como unidad de presión en lugar del pascal. Dado que 1 mb = 100 Pa la conversión entre ambos es directa: 1 atm = 1013 mb = 1013 hPa. En la práctica meteorológica habitual es común dar los mapas de presión en mb. Finalmente, con respecto a la temperatura, si bien en el SI la unidad es el kelvin (K) (Ojo no ºK !!), es también habitual darla en ºC donde 0 ºC = 273.15 K. 1.2 Notación Vectorial Numerosas magnitudes quedan totalmente determinadas mediante un número y las unidades de medida que le correspondan, como pueda ser por ejemplo la temperatura o el tiempo que emplea un navío en desplazarse de un punto a otro. A tales magnitudes se les denomina escalares. Sin embargo, existen otras que, para que queden totalmente determinadas se necesita conocer su módulo (o intensidad), su dirección y su sentido. Ejemplo de este tipo de magnitudes pueden ser la velocidad, la aceleración, la fuerza, etc. Son las denominadas magnitudes vectoriales que, generalmente, se representan por letras en negrita. 3 E.T.S. Náutica, Máquinas y Radioelectrónica Naval Universidad de La Laguna z y x Figura 1.1. Vectores unitarios i j k. Se denominan vectores unitarios a los que tienen dirección y sentido de cada uno de los ejes x, y, z, de un sistema cartesiano dextrógiro (a derechas) y cuyo o bien módulo (longitud) es igual a 1. Se suelen indicar por las letras i, j, k, o ̂ ̂ . Cualquier vector A puede representarse como la suma de los tres vectores unitarios que veíamos antes, tal que: A = Axi + Ayj + Azk (1.1) donde los escalares Ax, Ay, Az son las proyecciones de A sobre los ejes x, y , z. z z y y x β γ α x Figura 1.2. El vector A como composición de tres vectores unitarios. El módulo del vector A, |A| o A, expresado en función de los vectores unitarios i, j, k, es: | | A A A A 4 (1.2) 1. Operaciones con Vectores Análisis y Predicción del Tiempo Asimismo también se puede representar a A como la suma de los denominados cosenos directores, tal que: A = A(cosα i + cos β j + cos γ k) (1.3) donde cosα = Ax/A, cosβ = Ay/A y cosγ = Az/A. Todo esto también implica que el producto de un escalar por un vector A, es decir, b·A, es un vector de la misma dirección y sentido que A pero con un módulo, intensidad o longitud, b veces el de A. Dos vectores son iguales si lo son sus módulos y coinciden en dirección y sentido, o lo que es lo mismo: A = B, si Ax = Bx, Ay = By, Az = Bz 1.3 Suma y Resta de Vectores La suma y la diferencia de dos vectores se lleva a cabo componente a componente de la siguiente forma: A ± B = (Ax ± Bx)i + (Ay ± By)j + (Az ± Bz)k (1.4) Figura 1.3. Suma y resta de dos vectores. 1.4 Producto escalar Si A y B son vectores que podemos expresar de la siguiente forma: A = Axi + Ayj + Azk B = Bxi + Byj + Bzk El producto escalar de A por B es un escalar definido como: A·B = |A| |B|·cos θ = A·B·cos θ (1.5) 5 E.T.S. Náutica, Máquinas y Radioelectrónica Naval Universidad de La Laguna donde θ es el ángulo (≤ 180º) entre los dos vectores A y B. Es claro que aplicando este producto a los vectores unitarios se tiene: i·i = j·j = k·k = 1 (θ = 0º) i·j = i·k = j·k = 0 (θ = 90º) Se sigue que: A·B = (Axi + Ayj + Azk)·( Bxi + Byj + Bzk) = AxBx + AyBy + AzBz = B·A (1.6) cumpliendo además las siguientes propiedades: A·(B+C) = A·B + A·C (αA)·B = α(A·B) = A·(αB) Con esta definición es posible además obtener la proyección de un vector A sobre una recta r cuya dirección venga dada por un vector unitario ur. Dicha proyección vendrá dada por la expresión: |A| |ur |·cos θ = |A|·cos θ (1.7) Donde θ es el ángulo formado entre el vector A y la recta sobre la que se proyecta. 1.5 Producto vectorial El producto vectorial de dos vectores A B es un vector cuya dirección es aquella en la que avanzaría un tornillo que girase desde A a B por el camino más corto (θ ≤ 180º) y cuyo módulo es A·B·senθ (regla de la mano derecha). θ Figura 1.4. Producto vectorial de dos vectores. 6 1. Operaciones con Vectores Análisis y Predicción del Tiempo En este caso A B será un vector que sale hacia fuera del papel. Se suele representar en este caso con un punto. Si va hacia dentro se pone un aspa: Afuera Adentro De la definición se deduce que: i x j = –j x i = k k x i = –i x k = j ixi=jxj=kxk=0 (θ = 90º) ⇒ sen θ = 1 j x k = –k x j = i Usando estas propiedades puede ponerse: A B = (Axi + Ayj + Azk) x ( Bxi + Byj + Bzk) = = (AyBz – AzBy)i + (AzBx – AxBz)j + (AxBy – AyBx)k (1.6) Resultado que puede expresarse de forma matricial como: A B Ejemplo: Ω z (1.7) Ω r·senθ θ y x con un vector de posición . Figura 1.5. Partícula girando según Ω Si suponemos una partícula que gira alrededor del eje z con una velocidad según muestra la figura, donde es el vector de posición de la partícula angular Ω móvil. 7 E.T.S. Náutica, Máquinas y Radioelectrónica Naval Universidad de La Laguna = Ω·r·senθ es justamente el valor de la velocidad lineal de la partícula Ω es el de dirección del movimiento instantáneo de la partícula. Por y el vector Ω . tanto la velocidad instantánea de la partícula es Ω Los productos escalar y vectorial que acabamos de definir pueden ser aplicadas sucesivamente tantas veces como se desee en productos múltiples de vectores. Algunos de ellos que se emplean con cierta frecuencia son los siguientes: ! " # # # Un escalar # (1.8) " ! # " # – ! " # ! (1.10) !# " " # – !# " ! (1.9) Otra aplicación muy interesante del producto vectorial es la representación vectorial de una superficie. Dado que el área del paralelogramo que determinan dos vectores A y B coincide con el módulo del producto vectorial de ambos es posible definir el vector área como: S A B (1.11) cuyo módulo es el área de la superficie considerada, su dirección es perpendicular a la superficie y el sentido el del avance del tornillo. 1.6 Derivada de un Vector Si el vector u = u(t) es una función vectorial que depende del argumento escalar t, tal que: u = u(t) = ux(t)i + uy(t)j + uz(t)k La derivada de u con respecto a t queda como: duy du dux duz = i+ j+ k dt dt dt dt donde se cumplen las siguientes reglas de derivación: 8 1. Operaciones con Vectores Análisis y Predicción del Tiempo d(u+v+w) du dv dw = + + dt dt dt dt d(au) du da =a + u dt dt dt du dv d(v·u) = v· + u· dt dt dt d(v x u) du dv =vx + xu dt dt dt 1.7 Ejercicios a) Un barco de vela se mueve a 2 nudos en la dirección NNE. ¿Cuáles son las componentes de la velocidad del barco en dirección Norte y en dirección Este? Si el vector unitario u indica el Este y el vector unitario v indica el Norte, expresar el vector velocidad en función de sus componentes. b) Un barquero está remando sobre la barca queriendo mantenerse siempre perpendicular a la orilla de un río y cruzarlo con una velocidad media de 6 nudos. El agua del río fluye con una velocidad de 1,5 nudos. ¿Con qué velocidad ha de impulsar a la barca? ¿En qué dirección? c) Calcula el producto vectorial de los vectores: 5i – 3j + 2k, – 2i + j +3k y el ángulo que forman. d) Un avión se mueve a 320 kts en dirección NE. Calcula la proyección de su velocidad en la dirección Este. e) Un cuerpo rígido gira con una velocidad angular ω dada por el vector: ω = i + j + k. Calcula la velocidad lineal con que se mueve un punto P del cuerpo, cuto vector de posición es r = 2i – 2j + k, sabiendo que v = ω x r. f) Calcula el área del triángulo ABC, siendo las coordenadas cartesianas de los vértices (3,4,1) m, (–1,–2,1) m y (2,0,3)m. g) Una partícula se mueve de tal forma que el vector posición depende del tiempo de acuerdo con: r = (4 – 3t)i +(t2 + 2t)j + (6t3 – 3t)k. Calcular el vector velocidad (dr/dt) y el vector aceleración (dv/dt). 9




© Copyright 2026