
La diferencia entre matrices diagonalizables y normales
Universidad Interamericana de Puerto Rico - Recinto de Ponce
1
La diferencia entre matrices diagonalizables y normales
Por: Álvaro Lecompte Montes
Universidad Interamericana de Puerto Rico, Recinto de San Germán
1. Introducción
La diagonalización de las matrices se remonta a antes de la invención de las mismas, a la
forma normal de elipses, parábolas o hipérbolas. La teoría se expande en el siglo XIX a los
modos propios de los sistemas dinámicos, los ejes principales de inercia de un sólido o las
direcciones principales de esfuerzo-deformación en la teoría de la elasticidad. Actualmente la
misma se emplea en prácticamente todos los problemas de múltiples variables.
El objetivo general es la reducción del problema lineal de n variables a n problemas de una
variable, independientes entre sí. Buena parte de varios cursos universitarios de matemáticas se
dedica a este algoritmo. Sin embargo, quizás por la fragmentación con que se presenta, algunos
aspectos permanecen confusos. Por ejemplo, ¿cómo saber si la diagonalización se puede lograr
o no, antes de empezarla? Las matrices “normales” son diagonalizables y la condición de
normalidad se verifica fácilmente. Pero, ¿cuál es realmente la diferencia entre las matrices
normales y las demás diagonalizables?
Cuando no se logra la diagonalización, la matriz se puede reducir a la forma casi-diagonal
de Jordan, la forma de matriz triangular superior de Schur en una base ortonormal o la forma
de valores singulares, esto con dos bases ortonormales diferentes. Cada una de estas
descomposiciones puede ser útil, pero no es lo mismo que con matrices normales o
diagonalizables. ¿Cuál es realmente el obstáculo para la diagonalización? En todo caso, los
algoritmos numéricos más eficientes de diagonalización, para las matrices grandes, se diseñan
pasando por alguna de estas formas generales y la explicación de cómo se consiguen ayuda a
comprender el proceso de la diagonalización.
El detalle de la teoría se encuentra en los textos de álgebra lineal avanzados [1], de álgebra
abstracta [2] o de teoría de operadores [3], por lo que en este trabajo iremos directamente a los
posibles resultados, desde un punto de vista más práctico. Además, se indica cómo lograr las
descomposiciones de las matrices con el software disponible. En esta primera parte se enfatiza
la diferencia o semejanza entre las matrices diagonalizables y las normales. En una segunda
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
2
parte revisamos las formas de descomposición generales y cómo solventan la inexistencia de la
forma diagonal cuando esta es imposible.
2. Matrices diagonalizables
Las matrices diagonalizables son aquellas que se pueden factorizar de la forma:
A = C D C-1
(1)
Donde C es una matriz invertible, D diagonal y C-1 la inversa de C. La matriz diagonal D
tiene componentes no nulas solamente en la diagonal. La definición, como se ha dado, no es
verificable hasta terminar el proceso. Para saber si la matriz es diagonalizable hay que
conseguir la D, y la C y en medio del proceso se puede observar si se se logra o no la
diagonalización.
La matriz invertible C-1 cambia de las coordenadas originales x’s a unas nuevas
coordenadas y’s de la forma y = C-1 x. La matriz C regresa de esas coordenadas a las originales.
Desde un punto de vista más abstracto, C =
a la base estándar S.
representa una matriz de cambio de una base, B
Las nuevas coordenadas van por ejes en la dirección de los vectores de la
base B, que no necesariamente son perpendiculares entre sí. Las columnas de C se componen de
las coordenadas de los vectores de B en la base estándar. En el algoritmo tradicional de
diagonalización se calcula primero la D, luego la C y de última la inversa C-1, como se indica
enseguida.
La diagonalización se consigue si la base B está compuesta por vectores {u1, u2, …, un}
para los cuales A uj = λj uj, donde λj es el número que aparece en la diagonal en la posición j.
Los vectores u tales que: A u = λ u, para algún número λ, se llaman vectores propios de A y el
número λ se llama valor propio de A. Para diagonalizar necesitamos encontrar una base B de
vectores propios.
Los valores propios se pueden conseguir por el siguiente método atribuido al inglés Arthur
Cayley (1821-1895) y al irlandés William Hamilton (1805-1865), al menos para las matrices 2
x 2 y 3 x 3. El mismo fue luego extendido a todas las matrices por el francés Camille Jordan
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
3
(1822-1895). Por la misma definición de valor propio, para cada uno de ellos la matriz (A – λ I)
no es invertible. Por tanto, según la regla de Cramer para la inversa de una matriz (descubierta
por el suizo Gabriel Cramer (1704-1752)), su determinante debe ser cero:
Det(A – λ I) = 0
(2)
Vista como una ecuación para la λ, el lado derecho es un polinomio de grado n en la
variable λ, llamado el polinomio característico de la matriz A. Los valores propios son entonces
raíces del polinomio característico. Viceversa, cada raíz del polinomio característico es un valor
propio y tiene al menos un vector propio no nulo, que se puede conseguir resolviendo la
ecuación lineal A u = λ u, donde ahora λ ya es un número conocido.
Todo polinomio de grado n tiene n raíces en los números complejos, aunque algunas de
ellas pueden ser repetidas. Si el valor propio no es repetido, el vector propio es único, salvo un
cambio de escala. Además, los vectores propios de valores propios distintos son independientes
entre sí. El problema para lograr la base puede ocurrir si tenemos valores propios que son
raíces de multiplicidad mayor a 1 en el polinomio característico. Estos valores propios de
multiplicidad alta pueden tener más de un vector propio independiente asociado con ellos, pero
también puede ser que no tenga tantos como la multiplicidad algebraica. El número máximo de
vectores propios independientes asociado con un valor propio se conoce como la multiplicidad
geométrica. La matriz es diagonalizable si la multiplicidad geométrica de cada valor propio
coincide con su multiplicidad en el polinomio característico.
El proceso completo de conseguir los valores y vectores propios a mano es largo, pero el
software de álgebra lineal puede hacer el trabajo siguiendo el algoritmo descrito. Para las
matrices grandes existen métodos numéricos aproximativos más eficientes, pero esos los
dejamos para una segunda parte. En el programa Mathematica, por ejemplo, la orden
“Eigensytem[A]”, produce los valores propios en una lista en la primera parte del resultado y
los vectores propios en las filas de una matriz en la segunda parte, que podemos llamar B.
“Eigen” significa propio en alemán, así que la orden traduce “SistemaPropio”. En la salida del
comando, cada valor propio se repite según la multiplicidad algebraica y se consigue el máximo
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
4
de vectores propios independientes según la multiplicidad geométrica en las filas respectivas.
Pero cuándo no consigue más vectores propios, se completan los faltantes para ese valor propio
con vectores cero. La matriz A es diagonalizable si y solo sí la matriz C = BT de los vectores
propios escritos en columnas es invertible. El siguiente ejemplo muestra el proceso para una
matriz diagonalizable:
Ejemplo 1
En el siguiente ejemplo se tiene una matriz que no es diagonalizable, Cuando esto sucede,
se
cumple
la
relación:
A
C
=
C
D,
pero
la
C
no
se
puede
invertir.
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
5
Ejemplo 2
Pero siguen abiertas las preguntas: ¿cómo saber si la matriz A es o no diagonalizable antes
de empezar la tarea de buscar los valores y vectores propios? Además, ¿qué se gana realmente
con la diagonalización? Parte de la respuesta fue el descubrimiento de una clase muy
importante de matrices diagonalizables, las matrices normales.
3. Matrices normales
Para presentar de forma unificada los valores propios reales y complejos, de aquí en
adelante vamos a trabajar con matrices y vectores de números complejos. Con los complejos
casi nada cambia y usando el software no hay mayor trabajo adicional. Debe tomarse en cuenta,
sin embargo, que el producto interno del espacio vectorial complejo de dimensión n se define
conjugado lineal en la primera variable (algunos textos de matemáticas lo toman conjugado
lineal en la segunda variable):
⟨ | ⟩
∑
̅
(3)
Donde se ha indicado el conjugado complejo con la barra encima del número y el producto
interno con los paréntesis angulares o “brackets”. Este producto interno es el que produce
correctamente las longitudes (o normas) de los vectores complejos. El mismo se puede expresar
como un producto de matrices, si el primer vector se escribe como vector fila conjugada y el
segundo como vector columna:
⟨ | ⟩
[ ̅] [ ]
(4)
La operación T es la transposición, que convierte las columnas en filas. La composición de
conjugar y transponer se conoce como adjunción y se denota por un asterisco:
[
]
[ ̅̅̅̅]
[ ̅̅̅̅]
(5)
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
6
El físico inglés Paul Dirac (1902-1984) inventó una notación muy útil que simplifica
notablemente el cálculo de matrices. Dirac introdujo los términos “bra” (la primera mitad de un
bracket) para los vectores fila conjugados y los “ket” (la segunda mitad del bracket) para los
vectores columna:
⟨ |
[ ̅]
| ⟩
[ ]
(6)
Observe que los bra no se escriben conjugados todavía. La conjugación se realiza al
momento de contraer el bra con el ket. Por la misma razón, los complejos salen y entran
conjugados de los bra (técnicamente son conjugados-lineales como espacio vectorial). Cuando
se junta un bra con un ket se contraen a un número que es el producto interno de ambos. En el
otro orden, un ket por un bra, un “ketbra”, produce una matriz n x n:
| ⟩⟨ |
[ ] [ ̅]
[
̅]
(7)
Esta notación todavía no es ampliamente usada en matemáticas, pero sin ella no se pueden
leer los libros de física. Los bra y kets son dos tipos de vectores, pero también son como medias
matrices que componen los ketbra: el ket ayuda a formar las columnas y el bra (conjugado) las
filas. La adjunta de un bra es el ket correspondiente (sin conjugar, ya que la conjugación se
hace efectiva cuando el bra contrae con un ket) y la adjunta de un ket es el bra.
En el software Mathematica, la adjunción se hace con la orden “ConjugateTranspose[A]”.
En este lenguaje, los vectores se escriben como listas de números tales como {1, 0, 1}. Estos se
convierten en vector o matriz fila cerrando con un par de llaves: {{1, 0, 1}} y en vector o
matriz columna cerrando cada número con llaves: {{1}, {0}, {1}}. Las matrices n x n son
listas de n vectores, la lista de los vectores fila. La multiplicación de matrices, de matriz por
vector o de dos vectores (producto punto sin conjugación) de denota por un punto. Otros
programas de software tienen una notación parecida y no hay confusión. Veamos el siguiente
ejemplo:
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
7
Ejemplo 3
La matriz adjunta de A corresponde a la única matriz A* con la propiedad:
⟨ |
⟩
⟨
| ⟩
(8)
Es decir, la operación * actúa sobe los bra de forma dual a como A lo hace sobre los ket.
Las matrices normales se definen como aquellas que conmutan con su matriz adjunta, es
decir: A es normal si A A* = A* A.
Así definida, la normalidad es una propiedad que se puede verificar enseguida
multiplicando las matrices A y A* de las dos formas posibles y no parece ser algo más que una
curiosidad algebraica. Históricamente se estudiaron primero las matrices simétricas, aquellas
matrices reales iguales a su transpuesta, y luego las autoadjuntas, iguales a su adjunta. Ambas
clases
muy importantes en las aplicaciones y por esto mismo se descubrió que eran
diagonalizables. Estudiando que hace diagonalizables a las simétricas, se descubre esta
condición más general que incluye las anteriores.
La propiedad esencial de las matrices normales es la de ser diagonalizables en una base
ortonormal. Este resultado se conoce como
Teorema de Descomposición Espectral. Para
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
8
matrices reales simétricas se debe al matemático inglés James J. Sylvester (1814-1897. La
versión final para operadores normales en los espacios de Hilbert (de dimensión infinita) la
consiguió el húngaro Frygies Riesz (1880-1956).
Una base ortonormal (también llamada unitaria en los complejos) está formada por
vectores normalizados y perpendiculares entre sí. Es decir: B = {e1, e2,… , en}, donde ⟨ |
0 si i ≠ j y ⟨ |
⟩=
⟩ = 1. Cuando una matriz U contiene como columnas a los vectores de una
base ortonormal B, y la matriz U* a estos mismos como filas conjugadas, se sigue de inmediato
que U* U es la identidad. Entonces U es invertible, con U* = U-1. Estas matrices se llaman
matrices unitarias. Lo contrario también es cierto: una matriz unitaria está formada por vectores
columna ortonormales entre sí. Cuando la U es de coeficientes reales, la matriz tiene como
inversa a su transpuesta y se llama matriz ortogonal. El cambio de base es ahora del tipo
rotación o reflexión de los ejes originales.
Si una matriz A diagonaliza en una base ortonormal, se lleva a la forma A = U D U*, con U
unitaria, y se verifica enseguida que las matrices de esta forma son normales. El Teorema de
Descomposición Espectral garantiza lo inverso según se puede demostrar usando un proceso de
iteración. La parte esencial está en que cada vector propio de A, de valor propio λ, también es
vector propio de A*, de valor propio ̅ y, como consecuencia, el subespacio ortogonal al vector
e es invariante por A y A*. Esta propiedad se demuestra directamente usando (8) y la definición
de A normal.
Las matrices A y A* restringidas al subespacio ortogonal al vector propio, que es de una
dimensión menor, mantienen la relación de normalidad. Esto permite seguir reduciendo la
dimensión del problema de uno en uno hasta completar la base ortonormal normalizando los
vectores en cada paso y reduciendo el problema al subsespacio ortogonal a la base en progreso.
Veamos el siguiente ejemplo de la diagonalización de una matriz real simétrica (y por tanto
normal):
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
9
Ejemplo 4
Entre las matrices normales tenemos las autoadjuntas, la cuales tienen todos los valores
propios reales. Las matrices reales simétricas son un caso especial de las autoadjuntas. En este
caso todas las matrices de la diagonalización se pueden escoger reales. Las matrices positivas (A
≥ 0) son aquellas de la forma A = B*B para alguna matriz B. Las positivas son entonces
autoadjuntas, con todos los valores propios mayores o iguales a cero y viceversa, toda matriz
autodadjunta de valores propios positivos se factoriza de esa forma. Con la propiedad de
positividad se puede definir un orden parcial para las matrices, donde se define A ≥ B si
A–B
≥ 0. Por último, se distinguen las proyecciones ortogonales. Estas son matrices positivas (y por
tanto autoadjuntas) donde todos los valores propios son o cero o uno. Las proyecciones
ortogonales satisfacen: P ≥ 0 y P² = P.
Para una base ortonormal, las componentes de un vector se consiguen con el producto
interno. Si B = {e1, e2,… en} es una base ortonormal, entonces cualquier vector w se escribe:
∑
⟨ | ⟩
(9)
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
10
Con la notación de Dirac:
∑
⟨ | ⟩| ⟩
∑
( | ⟩⟨ |)
(10)
Una matriz normal A en su base ortonormal de vectores propios se escribe:
∑
⟨ | ⟩| ⟩
(∑
| ⟩⟨ |)
(11)
Usando solamente matrices:
∑
Las matrices
| ⟩⟨ |
∑
(12)
| ⟩⟨ | forman una descomposición de la identidad en
proyecciones
ortogonales, en el sentido de:
∑
(13)
La matriz A está ahora separada en una combinación de proyecciones ortogonales. Cuando
el valor propio es repetido, podemos juntar todas las proyecciones de esos vectores propios en
una sola proyección de dimensión mayor. Una vez se hace esto, las proyecciones de A son
únicas y se conocen como proyecciones espectrales.
La matriz del ejemplo 4 se descompone en sus proyecciones ortogonales de la siguiente
forma:
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
11
Ejemplo 5
4. La diferencia entre matrices diagonalizables y normales
¿Podemos lograr alguna fórmula parecida a (12) para las diagonalizables, aunque no sean
normales? Se puede lograr, pero con ciertas diferencias. Sea A = C D C-1. La matriz de cambio
de base C tiene como columnas a los vectores de la base B. Se puede llamar con letras u a los
vectores de B: B = {u1, u2,… un}, que ahora no son necesariamente ortonormales. La matriz C-1
ahora no necesariamente contiene como filas a los conjugados de B. No obstante, C-1 tiene
como filas los conjugados de alguna otra base: B’ = {v1, v2, … , vn}. Las coordenadas de los
vectores de B’ son las columnas de: C-1* = C*-1. Estos vectores de B’ se pueden describir
perfectamente con la fórmula de Krammer para la inversa de la matriz C*. La base B’ se llama
base dual de B. Esta base tampoco necesita ser ortonormal.
Los vectores de B’ son los que diagonalizan a la matriz A*, ya que:
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
(
12
)
(14)
Con valores propios que son los conjugados de los de A.
Por la definición de la base dual:
⟨ | ⟩= 0 si i ≠ j y ⟨ | ⟩
(15)
Es decir, los v’s son perpendiculares a todos los u’s de índice distinto y tienen producto
interno 1 con el u de mismo índice.
Como C-1 pasa de la base estándar a la base B, la fórmula para las coordenadas de un vector
w en la base B ahora es:
∑
⟨ | ⟩| ⟩
∑
(| ⟩⟨ |)
(16)
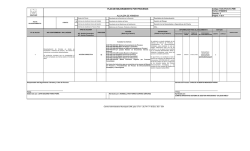
El siguiente ejemplo ilustra la relación entre una base no ortonormal el plano y su base dual.
La base B está formada por los vectores u1 = {1, 0} y u2 = {2, 1}. Un rápido cálculo muestra
que:
[
],
[
]
y
[
]
Se deduce entonces que: v1 = {1, -2} y v2 = {0, 1}. Las relaciones de dualidad se verifican
de inmediato: ⟨ |
⟩ = 1, ⟨ |
⟩= 0 y ⟨ |
⟩ = 1. Si usamos como ejemplo el vector w =
{3, 0.5}, sus coordenadas en la base B formada por las u’s son: w = 2 u1 + 0.5 u2 , que se
pueden obtener directamente de ⟨ | ⟩= 2 y de ⟨ | ⟩ = 0.5.
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
v2
13
u2
3, 0.5
u1
v1
Ejemplo 6
Con los ketbras formados con la base B y la base dual B’, la diagonalización de A se escribe
de la forma:
∑
Donde ahora las matrices
(| ⟩⟨ |)
(∑
)
(19)
| ⟩⟨ | no son necesariamente proyecciones ortogonales.
Las matrices Q tampoco son necesariamente autoadjuntas o normales. No obstante, por la
fórmula (14) estas matrices Q’s multiplicadas entre sí para índices distintos dan cero y entre
todas suman a la identidad:
| ⟩⟨ | ⟩ ⟨ |
Donde
| ⟩⟨ |
∑
(20)
es igual a uno para índices iguales y cero para índices diferentes. Podemos
llamar proyecciones oblicuas a las matrices con Q² = Q que no son autoadjuntas. Como
consecuencia de las identidades, estas proyecciones oblicuas conmutan entre sí. Si la base B es
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
14
ortonormal su base dual es ella misma, ya que la matriz U-1* es igual en este caso a U y las Q’s
son proyecciones ortogonales.
Igual que con las matrices normales, podemos juntar todas las proyecciones de un valor
propio repetido en una sola proyección oblicua y, entonces, esta descomposición de una matriz
diagonalizable en proyecciones oblicuas es única. Pudiera ser que algunas de las Q’s sean
ortogonales y otras no. Esto ocurre cuando A tiene un subespacio invariante, de complemento
ortogonal también invariante, donde A es normal en ese subespacio aunque no sea normal en el
complemento.
La diferencia entre una matriz diagonalizable pero no necesariamente normal está entonces
en que la descomposición no necesariamente es en proyecciones ortogonales, pero si en
proyecciones oblicuas. Las reglas de multiplicación de las Q’s o las P’s son muy importantes a
la hora de extender el cálculo de funciones a matrices diagonalizables, como se hace en el curso
de ecuaciones diferenciales cuando se calcula la exponencial de la matriz. Básicamente, las
reglas (13) y (20) dicen que el álgebra generada por las proyecciones es conmutativa. Esta
subálgebra de matrices contiene a todas las matrices que diagonalizan con las mismas
proyecciones. El cálculo de matrices se extiende entonces a través del cálculo de las matrices
diagonales.
Si la matriz A no es normal, esta álgebra no incluye las adjuntas y por tanto le falta algo
desde el punto de vista complejo. Las proyecciones ortogonales de una matriz normal, por el
contrario, son iguales a sus adjuntas y el álgebra es lo que se conoce como una *- algebra
conmutativa. La diferencia o ventaja está en la posible extensión de las identidades del cálculo
complejo a las matrices, interpretando el conjugado complejo como adjunción de matrices.
El siguiente ejemplo completa la descomposición de la matriz A del ejemplo 1:
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
15
Ejemplo 7
Con las matrices diagonalizables se puede ver enseguida que la matriz A se anula para el
polinomio:
p(λ) = (λ – λ1) (λ – λ2) … (λ – λk)
(21)
Donde ahora no se repiten valores propios. El teorema general que se puede conseguir al
respecto es el siguiente: una matriz A es diagonalizable si y solo si este polinomio que contiene
todas las raíces del polinomio característico sin repeticiones, se anula para la matriz A. Una vez
se introduzcan las formas más generales a las cuales se puede llevar cualquier matriz, ya sea la
forma de Jordan o la forma canónica racional, se puede demostrar que este resultado es
suficiente. No es un criterio tan directo como el de la normalidad, pero también es posible de
verificar una vez se tiene el polinomio característico y los valores propios, antes de buscar los
vectores propios.
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
16
Una última consideración, aunque un poco más abstracta, es la siguiente: hasta ahora hemos
usado el producto interno definido en (3). Pero suponga que A es diagonalizable, ¿será que
existe otro producto interno, con otra operación de adjunción, de forma que la matriz A sea
normal en esta nueva adjunción? Esto mostraría que no hay tanta diferencia entre
diagonalizabilidad y normalidad.
En el nuevo producto interno los vectores de la base B deben ser ortonormales. Como ya
tenemos una relación parecida a ortonormalidad al contraer la base B con la B’, la métrica del
nuevo producto interno debe ser:
⟨ | ⟩
⟨ | ⟩
⟨ |(
)
⟩
(22)
Esto significa que para un par cualquiera de vectores el producto interno será:
⟨ | ⟩
⟨ |(
)
⟩
⟨ |
⟩
(
)
(23)
La G es una matriz definida positiva (positiva e invertible), y la operación de adjunción
redefinida es:
(24)
Un cálculo largo pero directo muestra que efectivamente:
. Es decir, A es normal
para este nuevo producto interno. Podemos escribir esta conmutación con mayor simetría de la
forma:
(
Es decir, la matriz (
)(
)
(
)(
)
(25)
) es normal en el sentido ordinario. Al revés, si A es normal para un
producto interno dado por G, A factoriza de la forma (
unitaria. De donde se sigue: A =
, con C =
)
, para alguna U
.
Revista 360/ No.9/ 2014
Universidad Interamericana de Puerto Rico - Recinto de Ponce
17
Como criterio este resultado aparentemente no es muy útil, ya que para saber cuál es la métrica
que hace normal a A, la G, primero debemos diagonalizar A. Pero pudiera ser que el problema
en cuestión tenga otro producto interno natural de métrica G conocida, en cuyo caso vale la
pena probar si A es normal para G o no. También puede ser lo contrario, una vez se encuentra la
base que diagonaliza A, se puede considerar el producto interno definido por esa base como otro
producto interno “natural”, alterno al producto estándar, en el problema bajo estudio. En todo
caso, si no interesa mucho cuál es el producto interno subyacente, este resultado muestra que
las matrices normales y las diagonalizables son esencialmente lo mismo.
7. Conclusión
El cálculo de funciones con las matrices diagonalizables y mejor aún, con las normales, se
reduce completamente al cálculo de funciones sobre los valores propios. De esta forma,
múltiples problemas de n variables se reducen a n problemas de una variable, independientes
entre sí. Podemos verificar si una matriz es normal directamente de la definición, pero si la
matriz no es normal
debemos avanzar un poco en el proceso para saber si A es o no
diagonalizable. En ambos casos, para mostrar directamente la diagonalización, necesitamos
finalmente los valores y vectores propios.
Referencias:
1) Friedberg, S. H., A. J. Insel and L.E. Spence, Linear Algebra, 2nd Ed., Prentice Hall, 1989.
2) Dummit, D.S. and R. M. Foote, Abstract Algebra, Prentice Hall, 1991.
3) Naylor, A. W. and G. R. Sell, Linear Operator Theory in Engineering and Science,
Springer Verlag, 1982.
Álvaro Lecompte Montes, [email protected] Catedrático Asociado de matemáticas en la
Universidad Interamericana de Puerto Rico, San Germán, Puerto Rico. PH D en Ciencias de la
Universidad de Viena.
Revista 360/ No.9/ 2014


© Copyright 2026