
¿Qué es un Suero?
UNIVERSIDAD INDUSTRIAL DE SANTANDER
ESCUELA DE INGENIERIA MECÁNICA
SISTEMAS MECATRÓNICOS I
PRACTICA SOBRE
CONSTRUCCION DE UN SERVOMOTOR DC EXPERIMENTAL
Referencia: Laboratorio 7 Construcción de un Servomotor por Edwin José Vera Rozo
Adaptacion: Prof Ricardo Jaimes MSc
OBJETIVO
La construcción, programación y ensayo de un SERVO MOTOR DC experimental. Un
servomotor en su interior se compone de un motor DC, una serie de piñoneria
configurada en caja reductora para la obtención de un alto torque disminuyendo la
velocidad. Acoplado al eje de salida este último, se debe usar un potenciómetro lineal
para obtener una señal de realimentación que se le transmite al controlador (en este caso
Arduino) del Servo. Además requiere de un inversor de giro que para nuestro caso
particular utilizaremos el integrado de potencia L293D que se compone de 2 puente H
(Ver Anexo1);
MARCO CONCEPTUAL
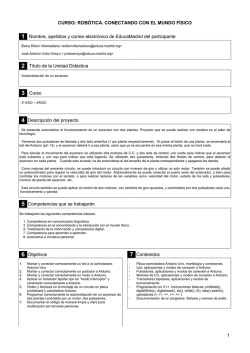
La figura 1 nos permite observar las partes más importantes del servomotor.
Figura 1. Componentes de un Servo de corriente continúa
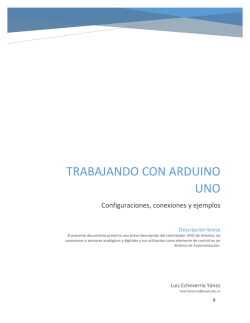
Algo muy importante para recalcar es que el POTENCIOMETRO de RETROALIMENTACION
debe ser lineal, si se coloca uno exponencial el sistema se desborda en los límites como se
aprecia en las siguientes imágenes mientras si se utiliza uno lineal el comportamiento del
servo es de la misma manera que es nuestro objetivo.
Figura 2. Comparación entre el potenciómetro logarítmico y el lineal
Potenciómetro Logarítmico
Potenciómetro Lineal
Materiales:
Motor DC, preferiblemente de 5 volts. **
Caja reductora. **
Potenciómetro Lineal. ** (Sensor de posición)
Puente H L293D.
Potenciometro Logaritmico ( Para el mando)
** En Centro Comercial Acropolis Primer Piso Local: 105, encuentran el motor DC
acoplado directamente a la caja reductora, al igual que el potenciómetro lineal a 5000
pesos que realmente es muy barato, de igual manera encuentra los demás componentes.
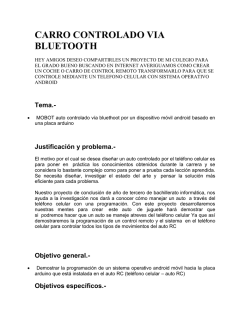
Figura 3. Esquema de Conexión para el Servo DC
Código en Arduino:
// UNIVERSIDAD INDUSTRIAL DE SANTANDER
// ESCUELA DE INGENIERIA MECANICA
// SISTEMAS MECATRONICOS
// LABORATORIO 7 - SERVOMOTOR CASERO
// DESIGNED AND POWERED BY: INGEV
const int setpoint = A0;
const int sensor = A1;
const int enable = 3;
const int direccion1 = 2;
const int direccion2 = 4;
long lecturasensor = 0;
long lecturasetpoint = 0;
void setup()
{
pinMode(enable, OUTPUT);
pinMode(direccion1, OUTPUT);
pinMode(direccion2, OUTPUT);
}
void loop()
{
lecturasensor = analogRead(sensor);
lecturasetpoint = analogRead(setpoint);
if(lecturasensor > lecturasetpoint){
izquierda();
}
if(lecturasensor < lecturasetpoint){
derecha();
}
if(lecturasensor == lecturasetpoint){
parar();
}
}
void derecha(){
digitalWrite(enable, HIGH);
digitalWrite(direccion1, HIGH);
digitalWrite(direccion2, LOW);
delay(100);
}
void izquierda(){
digitalWrite(enable, HIGH);
digitalWrite(direccion2, HIGH);
digitalWrite(direccion1, LOW);
delay(100);
}
void parar(){
digitalWrite(enable, LOW);
digitalWrite(direccion1, LOW);
digitalWrite(direccion2, LOW);
delay(100);
}
Bibliografía:
mecatronicauis.blogspot.com
mecatronicauis2012.blogspot.com
http://arduino.cc/
“EL INTELIGENTE NO ES AQUEL QUE LO SABE TODO SINO AQUEL QUE SABE
UTILIZAR LO POCO QUE SABE”
ANEXO 1
HOJA DE ESPECIFICACION DEL INTEGRADO L293D
http://www.contesti.eu/opensource/xyz-dc-motor-controller/ln293b-half-bridge-downloadablepdf-document

© Copyright 2026