
Improved Incompressible Smoothed Particle
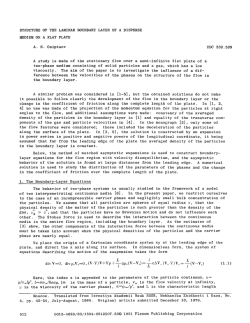
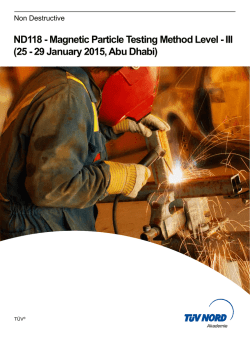
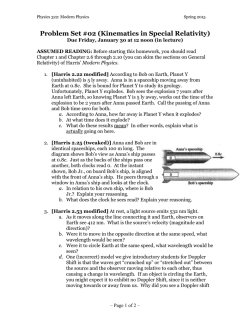
Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 Contents lists available at ScienceDirect Comput. Methods Appl. Mech. Engrg. journal homepage: www.elsevier.com/locate/cma Improved Incompressible Smoothed Particle Hydrodynamics method for simulating flow around bluff bodies Mostafa Safdari Shadloo, Amir Zainali, Samir H. Sadek, Mehmet Yildiz ⇑ Faculty of Engineering and Natural Sciences, Advanced Composites and Polymer Processing Laboratory, Sabanci University, 34956 Tuzla, Istanbul, Turkey a r t i c l e i n f o Article history: Received 19 March 2010 Received in revised form 14 September 2010 Accepted 1 December 2010 Available online 7 December 2010 Keywords: Meshless methods Incompressible Smoothed Particle Hydrodynamics (ISPH) Airfoil problem Square obstacle problem Bluff body Solid boundary treatment a b s t r a c t In this article, we present numerical solutions for flow over an airfoil and a square obstacle using Incompressible Smoothed Particle Hydrodynamics (ISPH) method with an improved solid boundary treatment approach, referred to as the Multiple Boundary Tangents (MBT) method. It was shown that the MBT boundary treatment technique is very effective for tackling boundaries of complex shapes. Also, we have proposed the usage of the repulsive component of the Lennard-Jones Potential (LJP) in the advection equation to repair particle fractures occurring in the SPH method due to the tendency of SPH particles to follow the stream line trajectory. This approach is named as the artificial particle displacement method. Numerical results suggest that the improved ISPH method which is consisting of the MBT method, artificial particle displacement and the corrective SPH discretization scheme enables one to obtain very stable and robust SPH simulations. The square obstacle and NACA airfoil geometry with the angle of attacks between 0° and 15° were simulated in a laminar flow field with relatively high Reynolds numbers. We illustrated that the improved ISPH method is able to capture the complex physics of bluff-body flows naturally such as the flow separation, wake formation at the trailing edge, and the vortex shedding. The SPH results are validated with a mesh-dependent Finite Element Method (FEM) and excellent agreements among the results were observed. Ó 2010 Elsevier B.V. All rights reserved. 1. Introduction Smoothed Particle Hydrodynamics (SPH) is one of the members of meshless Lagrangian particle methods used to solve partial differential equations widely encountered in scientific and engineering problems [1–4]. Unlike Eulerian (mesh-dependent) computational techniques such as finite difference, finite volume and Finite Element Methods, the SPH method does not require a grid, as field derivatives are approximated analytically using a kernel function. In this technique, the continuum or the global computational domain is represented by a set of discrete particles. Here, it should be noted that the term particle refers to a macroscopic part (geometrical position) in the continuum. Each particle carries mass, momentum, energy and other relevant hydrodynamic properties. These sets of particles are able to describe the physical behavior of the continuum, and also have the ability to move under the influence of the internal/external forces applied due to the Lagrangian nature of SPH. Although originally proposed to handle cosmological simulations [5,6], the SPH method has become increasingly generalized to handle many types of fluid and solid mechanics problems [7–11]. ⇑ Corresponding author. E-mail address: [email protected] (M. Yildiz). 0045-7825/$ - see front matter Ó 2010 Elsevier B.V. All rights reserved. doi:10.1016/j.cma.2010.12.002 Due to being a relatively new computational method for engineering applications (roughly two decades old), there are still a few significant issues with SPH that need to be scrutinized. It is still a challenge to model physical boundaries correctly and effectively. In addition, there are various ways to construct SPH equations (discretization), and a consistent approach has not gained consensus. Highly irregular particle distributions which occur as the solution progresses may cause numerical algorithms to break down, thereby making robustness another significant issue to be addressed. Namely, it is well-known by SPH developers that when passing from one test case to another, new problems are faced. For example, instabilities due to clamping of SPH particles which is not in general present in modeling a dam-breaking problem show themselves in the simulation of flow over bluff bodies, especially at the leading and trailing edges. These shortcomings are not insurmountable. The underlying factors causing these shortcomings can be understood through extensive research on the verification of SPH against a wide variety of possible applications as being done in the SPH literature. In most engineering problems, the domain of interest has, in general, solid boundaries. The SPH formulations being valid for all interior particles are not necessarily accurate for particles close to the domain boundary since the kernel function is truncated by the boundary. Therefore, the application of boundary conditions is M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 problematic in the SPH technique. Consequently, the proper and correct boundary treatments have been an ongoing concern for an accurate and successful implementation of the SPH approach [12,13] as well as other meshless methods [14,15] in the solution of engineering problems with solid walls. Improper boundary treatment has two important consequences. The first originates from the penetration of fluid particles into boundary walls, which then leave the computational domain. The second is that kernel truncation at the boundary produces errors in the solution. Hence, over the years, several different approaches have been used for the boundary treatment such as specular reflections, or bounceback of fluid particles with the boundary walls [16], LennardJones Potential (LJP) type force as a repulsive force [17,18], ghost particles [19–21], and Multiple Boundary Tangent (MBT) method [22]. Additionally, the homogeneity of the particle distribution is quite important for the accuracy and the robustness of SPH models. The formation of ill particle distributions during the simulation may result in the numerical solution to fail. For instance, if the pressure field is solved correctly thereby imposing the incompressibility condition as accurately as possible, the particle motion closely follows the trajectory of streamline, hence resulting in a linear clustering and in turn fracture in particle distribution. In these regions due to the lack of sufficient number of particles, or inhomogeneous particle distribution, the gradients of field variables can not be computed reliably. Such a situation leads to spurious fields, especially erroneous pressure values in the ISPH approach. As the computation progresses, errors in computed field variables accumulate whereby blowing-up the simulation. This paper suggests an improved ISPH algorithm that includes the implementation of (i) the multiple boundary tangent method to treat geometrically complex solid boundaries in a flow field, (ii) the artificial particle displacement (particle fracture repair) procedure for eliminating particle clustering induced instabilities, and (iii) the corrective SPH discretization scheme to improve the accuracy of the computation. 2. Smoothed Particle Hydrodynamics For clarity of the presentation, it is worthy of introducing notational conventions to be used throughout this article. All vector and tensorial quantities are written either using suffix notation with Latin indices denoting the components or direct notation with boldface letters. These components will be written either as subscripts (when particle identifiers are not used) or superscripts (when particle identifiers are used). As well, throughout this article the Einstein summation convention is employed, where any repeated component index is summed over the range of the index. These superscripts do not represent any covariant or contravariant nature. Latin boldface indices (i, j) will be used as particle identifiers to denote particles and will always be placed as subscripts that are not summed, unless indicated with a summation symbol. For example, the position vector for particle i is ~ ri ¼ xki ~ ek where xki denotes the components of the position vector and ~ ek is a base vector. The distance vector between a pair of particles is indicated ek ¼ r kij~ by ~ rij ¼ ~ ek , and the magnitude of the ri ~ rj ¼ xki xkj ~ distance vector k~ rij k is denoted by rij. The three-dimensional Dirac-delta function d3(rij), also referred to as a unit pulse function, is the starting point for the SPH technique. This function satisfies the identity f ð~ ri Þ ¼ Z 3 f ð~ rj Þd3 ðr ij Þd ~ rj ; ð1Þ X 3 rj is a differential volume element and X represents the towhere d ~ tal bounded volume of the domain. 1009 The SPH approach assumes that the fields of the particle of interest are affected by that of all other particles within the global domain. The interactions among the particles within the global domain are achieved through a compactly supported, normalized and even weighting function (smoothing kernel function) W(rij, h) with a smoothing radius jh (cut off distance, localized domain) beyond which the function is zero. Hence, in computations, a given particle interacts with only its nearest neighbors contained in this localized domain. Here, the length h defines the support domain of the particle of interest, j is a coefficient associated with the particular kernel function, and rij is the magnitude of the distance between the particle of interest i and its neighboring particles j. If the Dirac delta function in Eq. (1) is replaced by the kernel function W(rij, h), the integral estimate or the kernel approximation to an arbitrary function f ð~ ri Þ can be introduced as f ð~ ri Þ ffi hf ð~ ri Þi Z 3 f ð~ rj ÞWðrij ; hÞd ~ rj ; ð2Þ X where the angle bracket h i denotes the kernel approximation, and ~ ri is the position vector defining the center point of the kernel function. Approximation to the Dirac-delta function by a smoothing kernel function is the origin of the Smoothed Particle Hydrodynamics. The Dirac-delta function can be replaced by a smoothing kernel function provided that the smoothing kernel satisfies the following several conditions; namely, (i) normalization condition: the area under the smoothing function must be unity over its support domain, R 3 ~ X Wðr ij ; hÞd rj ¼ 1, (ii) the Dirac-delta function property: as the smoothing length approaches to zero, the Dirac-delta function should be recovered, limh?0 W(rij, h) = d3(rij), (iii) compactness property: which necessitates that the kernel function be zero beyond its compact support domain, W(rij, h) = 0 when rij > jh, and (iv) the kernel function should be spherically symmetric even function, W(rij, h) = W(rij, h), and be positive within the support domain W(rij, h) > 0 when rij < jh. Finally, the value of the smoothing function should decay with increasing distance away from the center particle. The smoothing function can be represented in a general form as W(rij, h) = (1/hd)f(rij/h) where d is the dimension of the problem, and f is a function. In literature, it is possible to find a wide variety of kernel functions which satisfy above-listed conditions, such as Gaussian, cubic or quintic kernel functions [18,23]. The smoothing kernels can be considered as discretization schemes in mesh dependent techniques such as finite difference and volume. The stability, the accuracy and the speed of an SPH simulation heavily depend on the choice of the smoothing kernel function as well as the smoothing length. Considering the stability and the accuracy of the simulations, throughout the present work, the compactly supported two-dimensional quintic spline kernel is used at the expense of higher computational cost. For example, the utilization of the higher order quintic spline in simulations is at least two times computationally more expensive than that of the cubic spline 8 ð3 sij Þ5 6ð2 sij Þ5 þ 15ð1 sij Þ5 if 0 6 sij < 1; > > > > 5 5 < 7 if 1 6 sij < 2; ð3 sij Þ 6ð2 sij Þ Wðrij ; hÞ ¼ 2> 5 478ph > ð3 s Þ if 2 6 sij 6 3; ij > > : 0 if sij P 3; ð3Þ here sij = rij/h. The spatial resolution of SPH is affected by the smoothing length. Hence, depending on the problem solved, each particle can be assigned to a different value of smoothing length. However, for a variable smoothing length, it is probable to violate Newton’s third law. For example, it might be possible for a particle j to exert a force on particle i, and not to experience an equal and opposite reaction force from particle i. To ensure that Newton’s 1010 M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 third law is not violated and the pair wise interaction among particles moving close to each other is achieved, the smoothing length is substituted by its average, defined as hij = 0.5(hi + hj). The averaged smoothing length ensures that particle i is within the influence domain of particle j and vice versa. 2.1. Spatial derivatives and particle approximation in SPH The SPH approximation for the gradient of an arbitrary function (i.e., scalar, vectorial, or tensorial) can be simply written through the substitution f ð~ rj Þ ! @f ð~ rj Þ=@xkj in Eq. (2) to produce @f ð~ ri Þ ffi @xki * + Z @f ð~ rj Þ @f ð~ ri Þ 3 Wðr ij ; hÞd ~ rj : k @xki X @xj ð4Þ Upon integrating Eq. (4) by parts and using the compactness property of the kernel function as well as noting that @Wðr ij ; hÞ=@xki ¼ @Wðrij ; hÞ=@xkj for a constant smoothing length h, it can be shown that * + Z @Wðr ij ; hÞ 3 @f ð~ ri Þ @f ð~ ri Þ ffi f ð~ rj Þ d~ rj : @xki @xki @xki X ð5Þ Using a Taylor series expansion and the properties of a second-rank isotropic tensor, as derived in Appendix A, a more accurate SPH approximation for the gradient of an arbitrary function can be introduced as N X r pij @Wðr ij ; hÞ mj p @ 2 f m ð~ ri Þ p ~ ~ ¼ 8 ðf ð r Þ f ð r ÞÞ ; i j qj @xm r 2ij @xki @xki i j¼1 N X r sij @Wðr ij ; hÞ mj p @ 2 f p ð~ ri Þ ¼2 ðf ð~ ri Þ f p ð~ rj ÞÞ 2 : k k q @xsi r ij @xi @xi j j¼1 ð6Þ PN k s where aks j¼1 ðmj =qj Þr ji ð@Wðr ij ; hÞ=@xi Þ is a corrective secondij ¼ rank tensor. This form is referred to as the corrective SPH gradient formulation that can be used to eliminate particle inconsistencies. It should be noted that the corrective term aks ij is ideally equal to Kronecker delta dks for a continuous function. On using Kronecker delta in Eq. (6), one can obtain the SPH gradient formulation of a vector-valued function commonly seen in the SPH literature. It should be noted that the corrective SPH formulation requires the inversion of aks ij , which might be singular for irregular and ill particle distribution. We have not experienced any difficulties related to aks ij corrective tensor being singular for a wide variety of benchmark problems solved (i.e., lid driven cavity, flow over backward facing step, Taylor vortices, and bubble deformation). However, if such a singularity problem exists for a given particle which can easily be determined through monitoring whether the determinant of the aks ij is zero or not, the corrective SPH formulation on that particle ks should not be imposed through setting aks ij ¼ d , thereby leading to the utilization of the standard SPH discretization scheme. Additionally, there are two main forms of the SPH approximation for the Laplacian of a vector-valued function [19,24]. For the sake of completeness, we have in Appendix A shown that these two forms can be derived from the SPH representation of the second order spatial derivative of a vector field @ 2 f p ð~ ri Þ=@xki @xli as N X r pij @Wðr ij ; hÞ mj p @ 2 f p ð~ ri Þ pm p ~ ~ a ¼ 8 ðf ð r Þ f ð r ÞÞ ; i j qj @xm r 2ij @xki @xki ij i j¼1 ð7Þ N X rsij @Wðrij ; hÞ mj p @ 2 f p ð~ ri Þ 2 þ allij ¼ 8 ðf ð~ ri Þ f p ð~ rj ÞÞ 2 : k k qj @xsi rij @xi @xi j¼1 ð8Þ Likewise, upon replacing the corrective second rank tensor in Eq. (7) and its trace in Eq. (8) by Kronecker delta and its trace, respectively, one can obtain the SPH Laplacian formulations of a vector-valued function suggested by Clearly and Monaghan [24], and Morris et al. [19], correspondingly ð10Þ Unlike Eq. (8), Eq. (7) can only be used for divergence free vectorvalued functions as shown in Appendix A. Throughout this work, all modeling result are obtained with the usage of corrective SPH discretization schemes since corrective SPH formulations produce more accurate and stable results than the standard SPH equations. We have also observed that Eq. (7) performs better for the discretization of the Laplacian of velocity fields than Eq. (8). Therefore, in all presented results, Eq. (7) is used for the Laplacian of velocity, while Eq. (8) is used for the Laplacian of pressure in the Poisson pressure equation. 2.2. Instabilities and their possible remedies in the SPH method To prevent the particle clustering, the trajectory of particles can be disturbed by adding relatively small artificial displacement drki to the advection of particles computed by the solution of the equation of motion. Recall the form of the Lennard-Jones Potential (LJP)-type force used in the SPH literature as a repulsive force for the solid boundary treatment, F ki;LJP ¼ N X ðro =r ij Þn1 ðro =r ij Þn2 j¼1 N mj p @Wðr ij ; hÞ @f p ð~ ri Þ ks X aij ¼ ðf ð~ rj Þ f p ð~ ri ÞÞ ; k q @xsi @xi j j¼1 ð9Þ br kij v 2max r 2ij ; ð11Þ where F ki;LJP is the force per unit mass on fluid particle i due to the neighbor particles j, n1 and n2 are constants, b is a problemdependent parameter, ro is the cutoff distance, and vmax is the largest particle velocity in the system. In this work, vmax is set to be equal to the absolute value of the maximum vx velocity. If the second term (attractive interaction) on the right-hand side of LJP force is neglected, and n1 = 2, and the force F ki;LJP , and vmax are replaced by dr ki =ðDtÞ2 and rij/Dt, one can write the relationship dr ki ¼ b N rk X ij j¼1 r 3ij r 2o v max Dt; ð12Þ where drki is an artificial particle displacement vector. P Here, the cut-off distance can be approximated as r o ¼ Nj¼1 rij =N. k 3 Given that rij =rij is an odd function with vanishing integral, one can P write Nj¼1 rkij =r 3ij ¼ 0 for a spherically symmetric particle distribution. However, if the particle distribution is asymmetric, and clusP tered, the term Nj¼1 r kij =r 3ij – 0 is no longer equal to zero, whereby implying the region with clustered particle distribution. The artificial particle displacement is only influential in the clustered region and negligibly small in the rest of the computational domain due to PN k 3 j¼1 r ij =r ij ffi 0 provided that the particle distribution is closely uniform. The offset vector d^rkii between the particle i and the center of mass of its influence domain can be presented as d^r kii ¼ xki ^xki ¼ N X rkij =N; ð13Þ j¼1 where xki and ^ xki are the coordinates of the particle i and the center of mass for the influence domain of the particle i. The comparison of the artificial particle displacement and offset vectors implies that upon using the particle displacement vector in the advection equation, the particle i moves towards the diluted particle region (the region which is away from the center of mass). Hence, the fractures in the simulation domain are repaired. Since the near boundary fluid particles have influence domains truncated by boundaries, with the usage of the artificial particle displacement vector in the computation, these fluid particles will tend to M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 move towards the boundary and stick to it. Even though this situation may appear as a problem and the deficiency of the approach, it might be used in advantageous way such that fluid particles close to boundaries are then artificially forced to move in conformation with boundaries. Hence pressure forces on the boundaries can be computed much more accurately in that particle deficiency is no longer problem therein. In our simulations, since the ghost particles are used for near boundary fluid particles, the influence domain of the kernel function is fully populated, and therefore such a problem is not an issue. The artificial particle displacement vector is added to the particle advection equation in both prediction and correction steps. This approach repairs all the clustering and fracture in the domain gradually without inducing significant errors in the computation, and enabling a quite robust SPH approach. It is due to this approach that it becomes possible to run simulations with higher Reynolds numbers, which are otherwise impossible to achieve. 2.3. SPH solution algorithms The governing equations used to solve the fluid problems in this article are the mass and linear momentum balance equations which are expressed in the Lagrangian form and given in direct notation as Dq=Dt ¼ qr ~ v; ð14Þ qD~ v =Dt ¼ r r þ q~f B : ð15Þ In the present simulations, the fluid is assumed to be incompressible and Newtonian. Hence, the incompressibility condition requires that the divergence of the fluid velocity r ~ v ¼ 0 be zero. Here, q is the fluid density, ~ v is the divergence-free fluid velocity, r is the total stress tensor, and ~ f B is the body force term, respectively. The total stress is defined as r = pI + T, where p is the absolute pressure, I is the identity tensor, T ¼ lðr~ v þ ðr~ vÞT Þ is the viscous part of the total stress tensor, where l is the viscosity. Finally, D/Dt is the material time derivative operator defined as D/Dt = @/@t + vl@/@xl. There are two common approaches utilized in the SPH literature for solving the balance of the linear momentum equation. The first one is widely referred to as the Weakly Compressible SPH (WCSPH) where the pressure term in the momentum equation is determined through an artificial equation of state. In the second approach known as the Incompressible SPH (ISPH), the pressure is computed by means of solving a pressure Poisson equation. The ISPH approach is based on the projection method [25–27], which uses the principle of Hodge decomposition. Upon using the Hodge decomposition, any vector field can be broken into a divergence-free part plus the gradient of an appropriate scalar potential. The Hodge decomposition can be written for a velocity field as ~ v ¼ ~ v þ ðDt=qÞrp; ð16Þ where v is the intermediate velocity, and ~ v is the divergence-free part of the velocity field. The projection method begins by ignoring the pressure gradient in the momentum balance equation. The solution of Eq. (15) without the pressure gradient produces the intermediate velocity ~ v , which does not, in general, satisfy mass conservation. However, this incorrect velocity field can be projected onto a divergence-free space after solving a pressure Poisson equation, from which the divergence-free part of the velocity field ~ v can be extracted. The pressure Poisson equation is obtained by taking the divergence of Eq. (16) as ~ r~ v =Dt ¼ r ðrp=qÞ: ð17Þ Eq. (17) is subjected to Neumann boundary conditions that can be obtained by using the divergence theorem on the pressure Poisson equation as ðq=DtÞ~ v ~ n ¼ rp ~ n; 1011 ð18Þ where ~ n is the unit normal vector. Having solved the pressure Poisson equation to obtain the pressure field and then computed the pressure gradient, we can use the Hodge decomposition equation to determine the correct, incompressible velocity field ~ v . Often, the boundary conditions for ~ v ðnþ1Þ are used for ~ v . This reduces Neumann boundary condition to rp ~ n ¼ 0 for no slip boundary condition. Note that in order for differentiating between spatial and temporal indices, the time index n is put within brackets. One of the main advantages of using ISPH is the elimination of the speed of sound parameter in the time-step conditions. Much larger time steps can be used in this approach, at the computational expense of having to solve the pressure Poisson equation at each time step. The algorithm stability is controlled by the Courant–Friedrichs–Lewy (CFL) condition, where the recommended time-step is Dt 6 CCFLhij,min/vmax where hij = 0.5(hi + hj), hij,min is the minimum smoothing length among all i–j particle pairs, and CCFL is a constant satisfying 0 < CCFL 6 1 (in this work, CCFL = 0.125). For time marching of the ISPH approach, we have used a firstorder Euler time step scheme. This technique is an explicit time integration scheme, and is relatively simple to implement. Particle positions, and velocities are computed respectively as D~ ri =Dt ¼ ~ vi ; D~ vi =Dt ¼ ~f i . The general form of the ISPH algorithm is as follow. The predictor step starts with determining an estimate ~ ri for ðnÞ all particle locations, given the previous particle positions ~ ri and ðnÞ the previous correct velocity field ~ v ðnÞ as ~ ri ¼ ~ ri þ ~ v ðnÞ Dt where i i ~ ri is the intermediate particle position. The intermediate velocity field ~ v i is computed on the temporary particle locations through the solution of the momentum balance equations with forward time integration by omitting the pressure gradient term as ~ðnÞ ~ vi ¼ ~ v ðnÞ i þ f i Dt. The pressure Poisson equation is solved to obtain ðnþ1Þ the pressure pi which is required to enforce the incompressibility condition. The pressure Poisson equation is solved using a biconjugate gradient stabilized method or a direct solver based on the Gauss elimination method. The Hodge decomposition principle is employed to solve for the actual velocity field ~ v ðnþ1Þ by i ðnþ1Þ using the computed pressure pi . Finally, with the correct velocity field for time-step n + 1, all fluid particles are advected to their ðnþ1Þ new positions ~ ri using an averageof the previous and current ðnþ1Þ ðnÞ ~ðnþ1Þ Dt. particle velocities as ~ ri ¼~ ri þ 0:5 ~ v ðnÞ i þ vi 2.4. Mesh generation and MBT boundary treatment for airfoil geometry This section presents the geometry and mesh generation, ghost particle creations and the implementation of the MBT boundary treatment for the airfoil geometry. Initially, a Cartesian mesh is created over a rectangular domain with the length and height of L and H, respectively. Then, an airfoil geometry is created using Eqs. (20) and (21). Since the leading edge of the airfoil has a curve with a steeper slope, the chord is split into two parts to be able to locate more boundary particles towards the leading edge. Discrete points on the chord are created with the formula xc ¼ ½ði 1Þ=ðilen 1Þn idis ð19Þ where xc is coordinates along the chord of the airfoil, i is a nodal index, ilen is the number of nodes along the chord, idis is the length of the chord, and n is the geometrical progression coefficient which controls the distance between points on the chord. Given the chord length of 1, 6 inequidistant nodal points created through the geometrical progression coefficient of 2 are located along the 5% of the chord length starting from the leading edge. The remaining section of the chord has 50 equidistant nodal points. The mean camber line coordinates are computed using Eq. (20) 1012 yc ¼ m 2pxc x2c =p2 yc ¼ mð2pðxc 1Þ þ 1 x2c Þ=ð1 p2 Þ M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 0 6 xc 6 p; p < xc 6 1; ð20Þ where m is the maximum camber in percentage of the chord, which is taken to be 5%, p is the position of the maximum camber in percentage of the chord that is set to be 50%, and t is the maximum thickness of the airfoil in percentage of the chord, which is 15%. The thickness distribution above and below the mean camber line is calculated as 2 3 4 yt ¼ 5t 0:2969x0:5 c 0:126xc 0:3516xc þ 0:284xc 0:1015xc : ð21Þ The final coordinates of the airfoil for the upper surface (xU, yU) and the lower surface (xL, yL) are determined using the following relations: xU = xc ytsinu, yU = yc + ytcosu, xL = xc + ytsinu, yL = yc ytcosu, and u = arctan(dyc/dx). Having obtained all coordinates of the airfoil geometry, the upper and lower surface lines are curve fitted using the least square method of order six. In so doing, it becomes possible to compute boundary unit normals, tangents and slopes for each boundary particles. All the initial particles falling between the upper and lower camber fitted curves are removed from the rectangular computational domain, then remaining fluid particles are combined with the boundary particles to form a particle array of the computational domain. The various steps of implementing the MBT boundary treatment technique to the airfoil geometry, as depicted in Figs. 1 and 2, are as follows: (a) At each or prescribed time steps, all near boundary fluid particles (particles with boundary truncations) as well as boundary particles are associated with their neighbor boundary particles using the cell array data structure (the Fortran 90 derived data type) as also described in our earlier work [22], see Fig. 1a. When dealing with a thin solid object enclosed by flow such as the trailing edge of the airfoil, for instance, near boundary fluid particles or boundary particles positioned above/on the upper camber take contribution from fluid and boundary particles located below the upper camber since the weighting function W(rij, h) has an influence domain that spans over the smoothing radius jh. Physically, particles flanking a solid wall should not affect each other. Consequently, the neighbor list computed through the standard box-sorting algorithm has to be modified, and then updated at each time step. The neighbor boundary particles of a given near boundary fluid particle are sorted in accordance with the distance between boundary particles and the fluid particle in ascending order. Then, the fluid particle in question is given the unit normal vector of its nearest boundary neighbor particle. For instance, fluid particle i = 25 in Fig. 1a is given the unit normal of the boundary particle i = 7. The neighbor lists of all particles are updated by computing the angles ð~ ni ~ nj Þ among unit normal vectors of particles and their neighbors. Here, ~ ni and ~ nj are the unit normal of a given particle and its neighbors. Only the particles with angles smaller than the preset value (130° used in this study) are regarded as neighbors to each other, whereby forming the updated neighbor list. To be more specific, as can be seen from Fig. 1b, the updated neighbor list of the particle i = 25 includes only those particles enclosed by a square frame since other neighbor particles do not satisfy the preset angle condition even though they are in the influence domain of the particle i = 25. (b) As in the case of step-a, all near boundary fluid and boundary particles are associated with their updated neighbor boundary particles. Associating near boundary fluid particles and boundary particles with their neighbor boundary particles, and sorting and then storing these neighbor boundary particles in accordance with the shortest distance among them allows for (i) the computation of the overlapping contributions of mirrored particles from each boundary particle, (ii) the confinement of the mirrored particles into the solid domain, (iii) defining solid boundaries by the envelope of boundary tangent lines, as well as (iv) associating mirrored particles with near boundary fluid particles. (c) Given that each boundary particle has fluid particles in its influence domain as neighbors, these fluid particles are mirrored with respect to the tangent line of the corresponding boundary particle as indicated in Fig. 2. The fluid particles should satisfy the condition ~ rbf ~ nb P 0, where ~ rbf is a position vector between the boundary particle and its neighbor fluid particles directing towards the fluid particles and ~ nb is the unit normal of the boundary particle. This condition ensures that only fluid particles above the associated boundary particle tangent line are mirrored. The second condition ~ rnbg ~ nnb 6 0 to be fulfilled is that mirrored particles should be confined into the solid region, meaning that mirrored Fig. 1. Boundary treatment for a submerged thin object: step-a. M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 1013 Fig. 2. Boundary treatment for a submerged thin object; (a) step-c and (b) step-d. particles associated with a boundary particle have to be inside of the all tangent lines of the neighbor boundary particles of the boundary particle in question, where ~ rnbg is the position vector between the ghost particles and the neighbor boundary particles of the given boundary particle and, ~ nnb is the unit normal vector of the neighbor boundary particles for the boundary particle in question. Using the cell array structure, every boundary particle is associated with its corresponding mirrored particles. Spatial coordinates and particle identification numbers of mirrored particles are stored in a cell array. To be more precise, mirrored particles are associated with the particle identification number of the fluid particle from which they are originated (referred to as the ‘mother’ fluid particle). For example, for a fluid particle indexed with i = 25, the ghost particle mirrored about a boundary particle tangent line (for example, boundary particle 7) will also be associated with i = 25 as shown in Fig. 2a. Note that fluid and boundary particles have numerical identifications that are permanent, whereas mirrored particles have varying (dummy) indices throughout the simulation. A ghost particle is given the same mass, density and transport parameters, such as viscosity, as the corresponding fluid particle. As for the field values (i.e. velocities) of a ghost particle, they are obtained depending on the type of boundary condition implemented. For instance, for no-slip boundary conditions, the following relation is implemented: ~ vg ¼ 2~ vb ~ v f where ~ vg ; ~ v b and ~ v f are the velocities of the ghost, boundary, and fluid particles, respectively. As for the implementation of a zero-gradient at the boundary, a ghost particle is given the same field values as the corresponding fluid particle; ~ vg ¼ ~ v f , and pg = pf, where pg and pf are the pressures of the ghost and fluid particles. If the boundaries are stationary walls, the ghost particles will have the velocity ~ v g ¼ ~ v f for no-slip boundary conditions. (d) In a loop over all particles, if a fluid particle has a boundary particle or multiple boundary particles as neighbor(s), then the fluid particle will become a neighbor of all mirrored particles associated with the corresponding boundary particles on the condition that (i) the mirrored particles are in the influence domain of the fluid particle in question, and (ii) for a mirrored particle, its mother particle has to be within the influence domain of the fluid particle in question. During the creation of ghost particles, there is an over-creation of ghost particles due to the fact that the influence domain of neighboring boundary particles overlaps. The overlapping contributions of mirrored particles can be eliminated by determining the number of times a given fluid particle is mirrored into the influence domain of the associated fluid particle with respect to a boundary particle’s tangent line. For computational efficiency, the fluid particle might only be associated with the mirror particles of its several nearest boundary particle rather than all neighbor boundary particles as explained in Fig. 2b. Boundary particle i = 7 has the shortest distance to i = 25 compared to other boundary particles neighbor to the fluid particle i = 25. Hence, mirror particles of i = 7 also become the neighbor of i = 25 provided that above two conditions (i and ii) are satisfied. Near boundary fluid particles hold the information of spatial coordinates and fluid particle identity numbers, boundary particle identity numbers (i.e. the particle number for a boundary particle to which mirrored particles are associated initially), and over-creation number for mirrored particles in the cell array format. During the SPH summation over ghost particles for a fluid particle with a boundary truncation, the mass of the ghost particles are divided by the number of corresponding over-creations. 3. Flow around a square obstacle and an airfoil In this work, to be able to test the effectiveness of the improved SPH algorithm proposed in Section 2 (involving the utility of the MBT method together with the artificial particle displacement and the corrective SPH discretization scheme) for modeling fluid flow over complex geometries, we have solved two benchmark flow problems; namely, two-dimensional simulations of a flow around a square obstacle and a NACA airfoil. Mass and linear momentum balance equations are solved for both test cases on a rectangular domain with the length of L = 15 m and the height of H = 6 m. A square obstacle with a side dimension of 0.7 m is positioned in the computational domain with its center coordinates at x = L/3 and y = L/2. Initially, a 349 145 array (in x- and y-directions, respectively) of particles is created in the rectangular domain, and then particles within the square obstacle are removed from the particle 1014 M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 array. This set of initial particles are created regularly through the formulations x = (i 1) L/(ilen 1), and y = (j 1) H/(jlen 1) where x and y are coordinates of particles, i and j are nodal indices in the x- and y-directions, respectively, and ilen and jlen are the number of nodes along the x- and y-directions in the given order. The boundary particles on the square obstacle are created such that their particle spacing is almost the same as the initial particle spacing of the fluid particles. The implementation of the MBT method for the square obstacle follows the same steps described previously for the airfoil geometry. The simulation parameters, fluid density, dynamic viscosity and body force are taken as respectively q = 1000 kg/m3, l = 1 kg/ms, and F xB ¼ 3:0 103 N=kg. The mass of each particle is constant and found through the relation P mi = qi/ni where ni ¼ j¼1 Wðr ij ; hÞ is the number density of the particle i. The smoothing length for all particles is set equal to 1.6 times the initial particle spacing. The slightly modified periodic boundary condition is implemented for inlet and outlet particles in the direction of the flow. Particles crossing the outflow boundary are reinserted into the flow domain at the inlet from the same y-coordinate positions with the velocity of inlet fluid region with its coordinates of x = 0, and y = 3 so that the inlet velocity profile is not poisoned by the outlet velocity profile. The no-slip boundary condition is implemented for Fig. 3. A close-up view for particle positions around the square obstacle for Reynolds number of 300. the square obstacle. For upper and lower walls bounding the simulation domain, the symmetry boundary condition for the velocity is applied such that vy = 0, and @vx/@y = 0 which is discretized by using Eq. (6). As for the pressure, a zero-pressure gradient condition rp ~ n ¼ 0 is enforced on all solid boundary particles. The channel geometry and the boundary conditions for the second benchmark problem are identical to the first one except that the square obstacle geometry is replaced by the NACA airfoil with a chord length of 2 m. The leading edge of the airfoil is located at Cartesian coordinates (L/5, H/2). Initially, a 300 125 array (in x- and y-directions, respectively) of particles is created in the rectangular domain, and then, particles within the airfoil are removed from the particle array. Subsequently, boundary particles are created and then distributed on solid boundaries. The smoothing length for all particles is set equal to 1.6 times the initial particle spacing. To show convergence, we run a test case with three different particle arrays, namely, 150 62, and 300 125 and 400 167 were used. It was observed that 300 125 array of particles is sufficient for particle number independent solutions. The flow around the airfoil and square obstacle positioned inside the channel were simulated for a range of Reynolds numbers Re = qlcvb/l, which is defined by the characteristic length, lc (set equal to the side length for the square obstacle, and the chord length for the airfoil geometry), the density, the bulk flow velocity vb and the dynamic viscosity l. Both test cases are validated through comparing SPH results with those obtained by a Finite Element Method (FEM) based solver of a Comsol multiphsics software tool. The ISPH and FEM results are compared in terms of velocity contours for both test cases, and the pressure envelope for the airfoil. Fig. 3 shows the close-up view of particle positions around the square obstacle for Reynolds number of 300. One can conclude that the implementation of the MBT method together with the artificial particle displacement and the corrective SPH discretization scheme can successfully hinder the formation of chaotic particle distribution and fracture (unlike those observed in Ref. [22]) in the entire flow domain (particularly in the vicinity of the boundary) and effectively prevent the particle penetration through the boundary (see Fig. 3), whereby producing simulation results in excellent agreement with FEM method as shown in Fig. 4. It is noted that Fig. 4. A comparison of ISPH (left) and FEM (right) velocity contours for two different Reynolds number values, 100 and 200. It should be noted that in this presentation, all velocities are given as a velocity magnitude. M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 for all of the test cases, the artificial particle movement coefficient is kept constant and equal to 0.01. It is also noted that this coefficient should be selected carefully such that it should be small enough not to affect the physics of the flow, but also large enough to prevent the occurrence of clustering and particle deficiency. Fig. 4 compares ISPH and FEM velocity contours for two different Reynolds number values, 100 and 200. It is well-known from both earlier experiments and numerical studies that vortex shedding is observed at the rear edge of the square obstacle at higher Reynolds numbers [28]. In light of this, to be able address whether the SPH method can capture vortex shedding as accurately as mesh dependent solvers, we here present simulation results for Reynolds number of 300, where Fig. 5 (left figures) shows the simulation results for the vortex tail down and up. On comparing ISPH and FEM results, one can notice that results are satisfactorily in agreement with each other regarding the magnitude of velocities as well as the position and the number of vortices. However, there is a slight discrepancy between ISPH and FEM results in terms of the separation point of the vortices from the rear edge of the obstacle. For the sake of brevity, without presenting further results, we can safely assert that the SPH method is highly successful in predicting changes of the topology of the vortex shedding behind a square obstacle with the Reynolds number. To have a closer look at the vortex shedding behavior captured at the trailing edge of the square obstacle by the ISPH method, in Fig. 6 are presented the streamlines of vortex shedding for a full period for the Reynolds number of 300. One can immediately notice the development of a small vortex at the rear top edge of the square obstacle, which is growing in size during its motion towards the rear lower edge, and then separating from therein. The next vortex starts at the lower rear edge, and grows in size while moving towards the top rear edge, and finally leaves the top rear edge. The accuracy of the ISPH method can be further validated by considering the Strouhal number, which is defined as St = xlc/vb, where x is the frequency of vortex shedding. The computed value of the Strouhal number for the ISPH method for the Reynolds number of 300 is 0.142, which is also consistent with the experimental result reported in the literature [29]. Having showed the capability and effectiveness of the improved ISPH algorithm on a geometry with sharp corners, we further tested our algorithm on a more general and complex geometry with curved boundaries and a thin body section. Fig. 7 presents a close-up view of particle positions around airfoils with the angles 1015 of attack of 5° and 15° for a simulation time of 100 s, corresponding to the Reynolds number of 570. The proposed algorithm is also very successful in simulating the flow around the airfoil geometry with any geometrical orientations across the flow field, whereby producing simulation results in very good agreement with the FEM method as shown in Figs. 8 and 9. Fig. 8 compares SPH and FEM velocity contours for the angle of attack of 15° with the Reynolds number value of 570. The pressure envelope results obtained by ISPH and FEM for smaller angles of attack are also in very good agreement with each other with some local deviations as shown in Fig. 9 (left). As for the angle of attack of 15°, there is a slight departure in pressure values from FEM results for the upper camber in the vicinity of leading edge and the stagnation point. These discrepancies in pressure values might be attributed to the dynamic nature of the SPH method since fluid particles are in continuous motion. Hence, there might be a local temporary depletion of particles nearby the solid boundaries as shown in Fig. 7, which deteriorates the accuracy of the computed pressure because the SPH gradient discretization scheme is rather sensitive to the particle deficiencies within the influence domain of the smoothing kernel function. Except the local deviations in pressure values on the airfoil, SPH results compare excellently well with FEM solutions. Additionally, the pressure differences between upper and lower camber which correlate with the lift force are in match with FEM results for a given position on the boundary. In order to investigate the sensitivity of the numerical solutions to particle numbers in the ISPH method and the underlying mesh in FEM, the velocity field over the airfoil at the same values of the parameters have been computed on three different sets of particles (i.e., 150 62 (coarse), 300 125 (intermediate), and 400 167 (fine)) and two sets of meshes (i.e., 11,953 number of triangular elements with 54,688 degrees of freedom (DOF) (coarse), and 191,248 number of triangular elements with 864,206 DOF (fine)). Fig. 10 shows velocity contours in terms of velocity magnitudes for the airfoil with the angle of attack of 15° at Reynolds number of 420. The comparison of results on the coarse, medium and the fine particle numbers demonstrates evidently that the intermediate particle number provides solutions with sufficient accuracy considering the trade-off between computational costs and capturing the features being studied. Since finer meshes are computationally expensive, the intermediate particle number is chosen for the numerical simulations presented in this Fig. 5. The comparison of vortex shedding contours obtained with ISPH (left) and FEM (right) methods for the cases of vortex tail down (up figures) and up (down figures) for the Reynolds number of 300. 1016 M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 Fig. 6. The streamlines of vortex shedding for a full period at the Reynolds number of 300 plotted on particle distribution where colors denote the velocity magnitude. One period T is 9.85 s. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.) article. The simulations are performed on a workstation with the configuration of Intel (R) Core (TM) i7 (@9500 @3.07 GHz) processor under Windows XP (64 bit) operating system. The computational cost in terms of CPU time for the coarse, medium and fine particle numbers are 1.36, 3.24 and 14.05 s per each time step, respectively. M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 1017 Fig. 7. Close-up view of particle positions around airfoils with the angles of attack of 5° and 15° for a simulation time of 100 s, corresponding to the Reynolds number of 570. For the angle of attack of 15°, there is slight particle depletion in the close vicinity of the stagnation point, which is not observed for lower values of the angle of attack. Fig. 8. A comparison of ISPH (left) and FEM (right) velocity contours for the angle of attack of 15° with the Reynolds number value of 570. Fig. 9. The comparison of pressure envelopes for the angles of attack of 5° (left) and 15° (right) for the Reynolds numbers of 420 (up) and 570 (down). 1018 M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 Fig. 10. The velocity fields in terms of velocity magnitudes over the airfoil (with the angle of attack of 15° at Reynolds number of 420) computed on three different sets of particles for the ISPH method and on two sets of meshes for FEM. Fig. 11. The comparison of vortex shedding contours produced by ISPH (left) and FEM (right) methods for the angle of attack of 10° and the Reynolds number of 1600. Fig. 11 compares ISPH and FEM results in terms of the vortex shedding contours for the angle of attack of 10° with the Reynolds number of 1600. As in the case of the presented square obstacle results, SPH results are also satisfactorily in agreement with FEM regarding the magnitude of velocities as well as the position and the number of vortices for the airfoil geometry. The vortex shedding behavior computed by the SPH method is presented in Fig. 12 as a close-up view magnifying the region about one airfoil length behind the trailing edge in terms of the streamlines of vortex shedding for a full period for the Reynolds number of 1400 and the angle of attack of 10°. There are two vortices near the trailing edge of the airfoil, one being on the upper camber, and the second is at the end of the trailing edge. The first vortex is pushing the second vortex away from the trailing edge during its downward motion towards the trailing edge. When the second vortex disappears, and the first vortex reaches to the trailing edge, a new vortex appears on the upper camber again, thereby completing a full period. 4. Conclusion In this work, we have presented solutions for flow over an airfoil and a square obstacle using an improved ISPH algorithm that can handle complex geometries with the usage of the MBT method, and eliminate particle clustering induced instabilities with the implementation of artificial particle displacement (particle fracture repair) procedure as well as the corrective SPH discretization scheme. The close-up views for the distribution of fluid particles around bluff bodies illustrate that the proposed boundary treatment prevents both particle deficiency and particle penetration across the solid boundary without disturbing flow structure. We have shown that the improved ISPH method can be effectively 1019 M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 Fig. 12. The streamlines of vortex shedding for a full period at the Reynolds number of 1400 plotted on particle distribution where colors denote the velocity magnitude. One period T is 3.2 s. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.) used for flow simulations over bluff-bodies with Reynolds numbers as high as 1600, which is not achievable with standard ISPH formulations. It should be noted that the improved ISPH algorithm is not limited to simulations for Reynolds numbers of 1600 in laminar flow regime. It can run to higher Reynolds number values without any interruption. Our simulation results are validated with an FEM method, and excellent agreements among the results were observed. We illustrated that the improved ISPH method is able to capture the complex physics of bluff-body flows naturally such as flow separation, wake formation at the trailing edge, and vortex shedding without any extra effort to increase the particle resolution in some specific areas of interest. As well, our future work includes the implementation of artificial particle displacement algorithm for the flow problems with free surfaces as well as the utilization of the MBT boundary treatment method in multiphase flow problems. Z ðf p ð~ rj Þ f p ð~ ri ÞÞ X ¼ @f p ð~ ri Þ @xli Funding provided by the European Commission Research Directorate General under Marie Curie International Reintegration Grant program with the Grant Agreement number of 231048 (PIRG03GA-2008-231048) is gratefully acknowledged. Appendix A Ils @Wðr ij ; hÞ 3 rlji r kji d~ rj : @xsj X |fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl} @f p ð~ ri Þ f p ð~ rj Þ ¼ f p ð~ ri Þ þ r lji @xli ~ rj ¼~ ri 1 @f p ð~ ri Þ þ rlji r kji l k 2 @xi @xi ðA:2Þ Ilks ¼0 Note that the first and the second integrals on the right hand side of Eq. (A.2) are, respectively, second- and third-rank tensors. The third-rank tensor Ilks can be integrated by parts, which, upon using the Green–Gauss theorem produces Eq. (A.3) since the kernel W(rij, h) vanishes beyond its support domain Z @ l k 3 r r d~ rj @rsj ji ji X Z 3 ¼ Wðr ij ; hÞ r lji dsk þ r kji dls d ~ rj Wðr ij ; hÞ ðA:3Þ X Recalling that the kernel function is spherically symmetric even function and the multiplication of an even function by an odd function produces an odd function. Integration of an odd function over a symmetric domain leads to zero Ilks ¼ dsk The following section provides derivations for the SPH approximation to first- and second-order derivatives of a vector-valued function. The derivations are carried out in Cartesian coordinates. The SPH approximation for the gradient of a vectorial function starts with a Taylor series expansion of f p ð~ rj Þ so that @Wðr ij ; hÞ 3 1 @f p ð~ ri Þ d~ rj þ s l k 2 @x @x @x X j i i |fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl} rlji Z Ilks ¼ Acknowledgement Z @Wðr ij ; hÞ 3 d~ rj @xsj Z Z 3 3 r lji Wðr ij ; hÞd ~ rj dls rkji Wðrij ; hÞd ~ rj ¼ 0: X X |fflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl} |fflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl} ¼0 ðA:4Þ ¼0 Following the above described procedure identically, the second rank tensor Ils can be written as Ils ¼ dls Z 3 Wðr ij ; hÞd ~ rj ¼ dls : |fflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflffl} ðA:5Þ X : ðA:1Þ ~ rj ¼~ ri Upon multiplying Eq. (A.1) by the term, @Wðr ij ; hÞ=@xsj , and then 3 rj , one can write, integrating over the whole space d ~ ¼1 On combining Eq. (A.2) with Eqs. (A.4) and (A.5), one can write, @f p ð~ ri Þ ¼ @xsi Z X ðf p ð~ rj Þ f p ð~ ri ÞÞ @Wðr ij ; hÞ 3 d~ rj : @xsi ðA:6Þ 1020 M.S. Shadloo et al. / Comput. Methods Appl. Mech. Engrg. 200 (2011) 1008–1020 Note that in Eq. (A.6), the relationship @Wðrij ; hÞ=@xsj ¼ @Wðrij ; hÞ=@xsi has been used. Replacing the integration in Eq. (A.6) with the SPH summation over particle ‘‘j’’ and setting 3 d~ rj ¼ mj =qj , we can obtain the gradient of a vector-valued function in the form of the SPH interpolation as Upon contracting on indices s and m of Eq. (A.10), an alternative form of the Laplacian for a vector field can be obtained as N mj p @Wðr ij ; hÞ @f p ð~ ri Þ X ¼ ðf ð~ rj Þ f p ð~ ri ÞÞ : s @xi qj @xsi j¼1 If the trace of the Kronecker delta in Eq. (A.15) is replaced by the trace of Eq. (A.12), one can obtain an alternative form of the corrective SPH interpolation for the Laplacian. ðA:7Þ It is important to note that the second rank tensor Ils, shown to be equal to Kronecker delta for a continuous function, may not be equal to Kronecker delta for discrete particles. Hence, for the accuracy of the computations, this term should be included in the SPH gradient interpolation of a function. From Eq. (A.2), we can write N X mj qj j¼1 ¼ ðf p ð~ rj Þ f p ð~ ri ÞÞ @Wðr ij ; hÞ @xsi N mj l @Wðrij ; hÞ @f p ð~ ri Þ X r : l @xsi @xi j¼1 qj ji ðA:8Þ Eq. (A.8) can be written in matrix form as 3 2 N N P P ð1Þ ð1Þ ð1Þ ð1Þ 6 fji aj 7 6 r ji aj 7 6 j¼1 6 j¼1 7¼6 6 7 6 N 6P 4 N ð1Þ ð2Þ 5 4 P ð1Þ ð2Þ fji aj r ji aj 3 2 ð1Þ 3 ð2Þ ð1Þ r ji aj 7 @fið1Þ 76 @xi 7 j¼1 76 7 74 ð1Þ 5; N P ð2Þ ð2Þ 5 @fi r ji aj ð2Þ @x 2 j¼1 N P j¼1 ðA:9Þ i j¼1 where asj ¼ ðmj =qj Þ @Wðr ij ; hÞ=@xsi . Starting with the relation for the SPH second-order derivative approximation [22] of a vector valued-function f p ð~ ri Þ given in Eq. (A.10) 2 Z ðf p ð~ ri Þ f p ð~ rj ÞÞ X ¼ rsij @Wðrij ; hÞ 3 d~ rj @xm r2ij i 2 @ 2 f p ð~ ri Þ 1 @ 2 f p ð~ ri Þ sm þ d ; s k k n @xi @xm n @x @x i i i ðA:10Þ which, upon contracting on indices p and s, one can obtain 2 Z ðf p ð~ ri Þ f p ð~ rj ÞÞ X rpij @Wðrij ; hÞ 3 1 @ 2 f p ð~ ri Þ pm d~ d : rj ¼ m 2 n @xki @xki @xi rij ðA:11Þ Note that the first term on the right hand side of Eq. (A.10) becomes @ 2 f p ð~ ri Þ=@xpi @xm and consequently drops off if the vector-valued i function f p ð~ ri Þ is assumed to be a divergence-free velocity field. Here, the coefficient n takes the value of 4 and 5 in two and three dimensions, respectively. We have shown in Eqs. (A.2) and (A.5) that Kronecker delta can be written as, dpm ¼ Z X r pji @Wðr ij ; hÞ 3 d~ rj : @xm i ðA:12Þ Casting Eq. (A.12) into Eq. (A.11) leads to 2 Z ðf p ð~ ri Þ f p ð~ rj ÞÞ X ¼ 1 @ 2 f p ð~ ri Þ n @xki @xki Z X rpij @Wðrij ; hÞ 3 d~ rj @xm r2ij i r pji @Wðrij ; hÞ 3 d~ rj @xm i ðA:13Þ Eq. (A.13) can be written in matrix form as 2 P ð1Þ ð1Þ 2 3 r a ð1Þ X ð1Þ ð1Þ a 6 j¼1 ji j ð2Þ ð2Þ 8 4 j 5 6 ¼ 4 P ð1Þ ð2Þ fij r ij þ fij r ij r 2ij að2Þ r a j¼1 j j¼1 ji j P j¼1 P j¼1 ð2Þ ð1Þ r ji aj ð2Þ ð2Þ r ji aj 32 ð1Þ i @xki @xki @2 f 3 76 7 76 7 54 @ 2 f ð2Þ 5 i @xk @xk i i ðA:14Þ 8 N X mj j¼1 qj ðf p ð~ ri Þ f p ð~ rj ÞÞ r sij @Wðr ij ; hÞ @ 2 f p ð~ ri Þ ¼ ð2 þ dss Þ k k : s 2 @xi r ij @xi @xi ðA:15Þ References [1] A. Rafiee, M.T. Manzari, S.M. Hosseini, An incompressible SPH method for simulation of unsteady viscoelastic free-surface flows, Int. J. Non-Linear Mech. 42 (10) (2007) 1210–1223. [2] Y. Mele’an, L.D.G. Sigalotti, A. Hasmy, On the SPH tensile instability in forming viscous liquid drops, Comput. Phys. Commun. 157 (2004) 191–200. [3] A.M. Tartakovsky, P. Meakin, A smoothed particle hydrodynamics model for miscible flow in three-dimensional fractures and the two-dimensional Rayleigh Taylor instability, J. Comput. Phys. 207 (2) (2005) 610–624. [4] P.W. Cleary, J. Ha, V. Aluine, T. Nguyen, Flow modelling in casting processes, Appl. Math. Mod. 26 (2002) 171–190. [5] L.B. Lucy, A numerical approach to the testing of the fission hypothesis, Astron. J. 82 (1977) 1013. [6] R.A. Gingold, J.J. Monaghan, Smooth particle hydrodynamics: theory and application to non-spherical stars, Mon. Not. R. Astron. Soc. 181 (1977) 375. [7] L.D.G. Sigalotti, J. Klapp, E. Sira, Y. Mele’an, A. Hasmy, SPH simulations of timedependent Poiseuille flow at low Reynolds numbers, J. Comput. Phys. 191 (2003) 622–638. [8] A. Rafiee, K.P. Thiagarajan, An SPH projection method for simulating fluidhypoelastic structure interaction, Comput. Methods Appl. Mech. Engrg. 198 (2009) 2785–2795. [9] M.B. Liu, G.R. Liu, K.Y. Lam, A one-dimensional meshfree particle formulation for simulating shock waves, Shock Waves 13 (2003) 201–211. [10] S.M. Hosseini, M.T. Manzari, S.K. Hannani, A fully explicit three-step SPH algorithm for simulation of non-Newtonian fluid flow, J. Numer. Methods Heat Fluid Flow 17 (7) (2007) 715–735. [11] R.A. Rook, M. Yildiz, S. Dost, Modelling 2D transient heat transfer using SPH and implicit time integration, J. Numer. Heat Transfer B 51 (2007) 1–23. [12] S. Kulasegaram, J. Bonet, R.W. Lewis, M. Profit, A variational formulation based contact algorithm for rigid boundaries in two-dimensional SPH applications, Comput. Mech. 33 (2004) 316–325. [13] J. Feldman, J. Bonet, Dynamic refinement and boundary contact forces in SPH with applications in fluid flow problems, Int. J. Numer. Methods Engrg. 72 (2007) 295–324. [14] Y. Krongauz, T. Belytschko, Enforcement of essential boundary conditions in meshless approximations using finite elements, Comput. Methods Appl. Mech. Engrg. 131 (1996) 133–145. [15] I. Alfaro, F. Yvonnet, R. Chinesta, E. Cueto, A study on the performance of natural neighbour-based Galerkin methods, Int. J. Numer. Methods Engrg. 71 (2007) 1436–1465. [16] J.C. Simpson, M. Wood, Classical kinetic theory simulations using smoothed particle hydrodynamics, Phys. Rev. E 54 (2) (1996) 2077–2083. [17] J.J. Monaghan, A. Kos, Solitary waves on a cretan beach, J. Waterway Port Coastal Ocean Engrg. – ASCE 125 (1999) 145–154. [18] J.J. Monaghan, Smoothed particle hydrodynamics, Rep. Prog. Phys. 68 (2005) 1703. [19] J.P. Morris, P.J. Fox, Y. Zhu, Modeling low Reynolds number incompressible flows using SPH, J. Comput. Phys. 136 (1997) 214–226. [20] A. Colagrossi, M. Landrini, Numerical simulation of interfacial flows by smoothed particle hydrodynamics, J. Comput. Phys. 191 (1) (2003) 448–475. [21] H. Takeda, S.M. Miyama, M. Sekiya, Numerical simulation of viscous flow by smoothed particle hydrodynamics, Prog. Theor. Phys. 92 (5) (1994) 939–960. [22] M. Yildiz, R.A. Rook, A. Suleman, SPH with the multiple boundary tangent method, Int. J. Numer. Methods Engrg. 77 (10) (2009) 1416–1438. [23] M.B. Liu, G.R. Liu, Smoothed particle hydrodynamics (SPH): an overview and recent developments, Arch. Comput. Methods Engrg. 17 (2010) 25–76. [24] P.W. Cleary, J.J. Monaghan, Conduction modelling using smoothed particle hydrodynamics, J. Comput. Phys. 148 (1999) 227–264. [25] A.J. Chorin, Numerical solutions of the Navier–Stokes equations, Math. Comput. 22 (1968) 745–762. [26] A.J. Chorin, On the convergence of discrete approximations to the Navier– Stokes equations, Math. Comput. 23 (1969) 341–353. [27] S.J. Cummins, M. Rudman, An SPH projection method, J. Comput. Phys. 152 (1999) 584–607. [28] J. Bernsdorf, Th. Zeiser, G. Brenner, F. Durst, Simulation of a 2D channel flow around a square obstacle with Lattice–Boltzmann (BGK) automata, Int. J. Mod. Phys. C 9 (8) (1998) 1129–1141. [29] A. Okjima, Strouhal numbers of rectangular cylinders, J. Fluid Mech. 123 (1982) 379–398.






© Copyright 2026