
Introducción a los vectores
Matemáticas Avanzadas:
de los espacios lineales al análisis vectorial
in
ar
H. Hernández
Departamento de Fı́sica, Facultad de Ciencias,
Universidad de Los Andes, Mérida-Venezuela
re
lim
L. A. Núñez
Escuela de Fı́sica, Facultad de Ciencias,
Universidad Industrial de Santander, Bucaramanga-Colombia
Bo
rr
ad
o
rP
10 de octubre de 2016
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Bo
rr
ad
o
rP
re
lim
1. Los vectores de siempre
1.1. A manera de introducción . . . . . . . . . . . . . . . . . . . .
1.2. Vectores, escalares y álgebra vectorial . . . . . . . . . . . . .
1.2.1. Escalares y vectores . . . . . . . . . . . . . . . . . . .
1.2.2. Álgebra de vectores . . . . . . . . . . . . . . . . . . .
1.2.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . .
1.3. Independencia lineal, vectores base y el producto de vectores
1.3.1. Vectores linealmente independientes . . . . . . . . . .
1.3.2. Productos de vectores . . . . . . . . . . . . . . . . . .
1.3.3. Producto escalar . . . . . . . . . . . . . . . . . . . . .
1.3.4. Producto vectorial . . . . . . . . . . . . . . . . . . . .
1.3.5. Producto triple o mixto . . . . . . . . . . . . . . . . .
1.3.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . .
1.4. Componentes, coordenadas y cosenos directores . . . . . . . .
1.4.1. Bases, componentes y coordenadas . . . . . . . . . . .
1.4.2. Cosenos directores . . . . . . . . . . . . . . . . . . . .
1.4.3. Una división fallida . . . . . . . . . . . . . . . . . . . .
1.4.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . .
1.5. Algebra vectorial y coordenadas . . . . . . . . . . . . . . . . .
1.5.1. Suma y resta de vectores . . . . . . . . . . . . . . . .
1.5.2. Dependencia e independencia lineal . . . . . . . . . . .
1.5.3. Productos de Vectores en coordenadas . . . . . . . . .
1.5.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . .
1.6. Aplicaciones del álgebra vectorial . . . . . . . . . . . . . . . .
1.6.1. Rectas y vectores . . . . . . . . . . . . . . . . . . . . .
1.6.2. Planos y vectores . . . . . . . . . . . . . . . . . . . . .
1.6.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . .
1.7. Álgebra vectorial con ı́ndices . . . . . . . . . . . . . . . . . .
1.7.1. Convención de Einstein . . . . . . . . . . . . . . . . .
1.7.2. Los vectores y los ı́ndices . . . . . . . . . . . . . . . .
1.7.3. Escalares, pseudoescalares, vectores y pseudovectores .
1.7.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . .
1.8. Un comienzo a la derivación e integración de vectores . . . .
in
ar
Índice general
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
5
5
5
6
8
9
9
10
10
12
12
13
14
14
16
16
16
17
17
17
18
21
22
22
23
24
25
25
27
28
30
31
ÍNDICE GENERAL
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
32
34
36
38
40
44
45
46
47
48
49
53
54
59
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
68
70
72
83
87
88
89
re
lim
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Bo
rr
ad
o
rP
2. Apéndice
2.1. Introducción a los CAS . . . .
2.2. Maxima: Sintaxis básica . . . .
2.2.1. Cálculos elementales . .
2.2.2. Bibliotecas . . . . . . .
2.2.3. Maxima en modo texto
2.2.4. Invocando la ayuda . . .
2.3. Ejercicios . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
in
ar
1.8.1. Vectores variables . . . . . . . . . .
1.8.2. Derivación . . . . . . . . . . . . . . .
1.8.3. Velocidades y aceleraciones . . . . .
1.8.4. Vectores y funciones . . . . . . . . .
1.8.5. El operador ∇ . . . . . . . . . . . .
1.8.6. Integración . . . . . . . . . . . . . .
1.8.7. Ejercicios . . . . . . . . . . . . . . .
1.9. Vectores y números complejos . . . . . . . .
1.9.1. Los números complejos y su álgebra
1.9.2. Vectores y el plano complejo . . . .
1.9.3. Fórmulas de Euler y De Moivre . . .
1.9.4. Algunas aplicaciones inmediatas . .
1.9.5. Ejercicios . . . . . . . . . . . . . . .
1.10. Algunos ejemplos resueltos . . . . . . . . . .
1.11. Ejercicios propuestos . . . . . . . . . . . . .
3
1
Bo
rr
ad
o
rP
re
lim
Los vectores de siempre
in
ar
Capı́tulo
4
1.1. A MANERA DE INTRODUCCIÓN
1.1.
A manera de introducción
1.2.
Vectores, escalares y álgebra vectorial
in
ar
Este capı́tulo tiene varios objetivos. Por un lado busca refrescar un conjunto de conceptos básicos que
seguramente son conocidos por el lector. Si no lo son, aprovechamos la oportunidad para presentarlos, en el
marco de los vectores tridimensionales, utilizando el lenguaje abstracto al cual luego haremos referencia en los
próximos capı́tulos. Esa es la razón que presentamos, las ideas, propiedades de los vectores (la próxima sección
1.2); de independencia lineal, bases, producto interno (Sección 1.3) y sistemas de coordenadas (Sección 1.4).
Con la excusa del algebra vectorial en coordenadas, introducimos elementos de álgebra vectorial con ı́ndices
que normalmente no son cubiertos tan tempranamente (Sección 1.7). Esta excusa nos sirve de puente para
presentar nociones operativas de tensores y de análisis de vectorial que formalizaremos más adelante en los
capı́tulos ?? y ??, respectivamente. Finalmente, este capı́tulo nos sirve para iniciar el uso de la herramienta
de cálculo algebráico que nos acompañará en el resto del libro.
re
lim
Desde los primeros cursos de Fı́sica en educación media, venimos hablando de vectores como cantidades
que tienen que ser representadas con más de un número. Son varias las razones que obligan a introducir este
(y otro) tipo de cantidades “multidimensionales”. Enumeraremos algunas que, a nuestro criterio personal,
son las más representativas.
1. Necesidad de modelos matemáticos de la naturaleza. Desde los albores del renacimiento, con
Galileo Galilei a la cabeza, nos es imperioso representar cantidades de manera precisa. Las matemáticas
nos apoyan en esta necesidad de precisión y desde ese entonces son el lenguaje de la actividad cientı́fica.
rP
2. Los modelos tienen que ser contrastados con los experimentos. Las ciencias y sus modelos,
en última instancia, tienen que ver con la realidad, con la naturaleza y por ello debemos medir y
contrastar las hipótesis con esa realidad que modelamos. Necesitamos representar cantidades medibles
(observables) y que, por lo tanto, tienen que ser representadas de la forma más compacta, pero a la
vez más precisa posible.
ad
o
3. Las leyes de los modelos deben ser independiente de los observadores. Cuando menos a
una familia significativa de observadores, el comportamiento de la naturaleza no puede depender de la
percepción de un determinado observador, por lo tanto, los modelos que construimos para describirla
tampoco pueden depender de los observadores.
Bo
rr
Es común que tropecemos con: escalares, vectores, tensores y espinores, dependiendo del número de
cantidades que necesitemos para representar determinado objeto matemático. Podremos constatar que las
leyes de la Fı́sica vienen escritas en forma vectorial (o tensorial) y, por lo tanto, será la misma ley para la
familia de observadores equivalentes.
1.2.1.
Escalares y vectores
Dejaremos para más adelante caracterizar objetos como tensores y espinores, por ahora nos contentaremos
con refrescar nuestros recuerdos con cantidades como:
Escalares: Serán aquellas cantidades las cuales se representan con UN solo número, una magnitud: temperatura,
volumen, masa, entre otras. Es costumbre no denotarlas de manera especial, ası́ T = 5o C representará
una temperatura de 5 grados centı́grados.
5
re
lim
in
ar
1.2. VECTORES, ESCALARES Y ÁLGEBRA VECTORIAL
Figura 1.1: Vectores y sus operaciones
ad
o
rP
Vectores: Serán cantidades las cuales, para ser representadas por un objeto matemáticos requieren más de una
cantidad: requieren de UN número, UNA dirección y UN sentido. Entre las cantidades que tı́picamente
reconocemos como vectores están: la velocidad, la aceleración, la fuerza. En términos gráficos podremos
decir que un vector será un segmento orientado, en el cual la dimensión del segmento representará su
módulo y su orientación la dirección y el sentido. Para diferenciarlos de las cantidades escalares hay
~ con
una variedad de representaciones, entre ellas: en negrita a; con una flecha arriba de la cantidad A;
−−→
una tilde arriba o abajo Ã; o explicitando el origen del segmento orientado OP . El módulo del vector lo
~
representaremos dentro de la función valor absoluto, o sencillamente sin la flecha arriba A = |a| = |A|.
Bo
rr
Los vectores son independientes del sistema de coordenadas. Sus caracterı́sticas (módulo, dirección y
sentido) se preservarán en todos los sistemas de coordenadas. Más aún, habrá vectores que podremos desplazarlos (conservando su módulo dirección y sentido) paralelos a ellos mismos, en el espacio y seguirán siendo
los mismos, por ello encontraremos el término de vectores deslizantes. Un ejemplo son las fuerzas que actúan
en un determinado cuerpo, como se muestra el cuadrante I en la figura 1.1. También habrá vectores atados
a un punto en el espacio, por cuanto representan una de sus propiedades: la velocidad del viento, el campo
eléctrico, o sus variaciones son algunos ejemplos de estos vectores atados (observe la figura 1.2 como ejemplos
ilustrativos).
1.2.2.
Álgebra de vectores
Enumeraremos rápidamente el álgebra de vectores sin hacer referencia a un sistema de coordenadas en
particular. Desde los cursos básicos de matemáticas nos enseñaron a representar gráficamente este álgebra,
ası́ tenemos que:
6
1.2. VECTORES, ESCALARES Y ÁLGEBRA VECTORIAL
Vector nulo. Es aquel que tiene por módulo cero y no se le pude asignar dirección ni sentido. El frecuente
representar al vector nulo por 0.
Vector unitario. Es aquel que tiene por módulo la unidad, es muy útil por cuanto, para efectos algebraicos,
“contiene” únicamente dirección y sentido. Lo denotaremos con un acento circunflejo, comúnmente llamado
“sombrero” ûA = a/|a|, con lo cual todo vector se podrá expresar por un módulo en la dirección y sentido
de un vector unitario: a = |a| ûA = A ûA .
rP
Suma de vectores. Para sumar vectores utilizamos la regla del paralelogramo, es decir, desplazamos paralelamente uno de los vectores y lo colocamos a continuación del otro, de tal forma que la
diagonal del paralelogramo, que tiene por lados los
vectores sumandos, constituye el vector suma, (ver
cuadrantes IIa y IIb de la figura 1.1).
re
lim
Multiplicación por un número. Un vector
multiplicado por un número, α, cambiará su módulo
si α > 0 y cambiará su sentido, y eventualmente su
módulo, si α < 0. Tal y como puede apreciarse en
el cuadrante IIa de la figura 1.1. Claramente dos
vectores proporcionales serán colineales. Diremos
además, que el inverso del vector a será la multiplicación de a por (−1). Esto es: (−1) a = −a.
in
ar
Comparación de vectores. Al comparar sus módulos diremos que pueden ser mayores, menores o iguales.
Por lo tanto, tal y como mostramos en el cuadrante IIa de la figura 1.1, dos vectores serán iguales, a = b, si
tienen la misma dirección y sentido.
Figura 1.2: Ejemplos de vectores atados
ad
o
Este esquema se puede generalizar para varios vectores tal y como lo mostramos en el cuadrante III de la
figura 1.1. Allı́ construimos un polı́gono cuyos lados los constituyen los vectores sumandos a, b, c, d y n con
n = a + b + c + d. Nótese que aún en el caso tridimensional, el vector suma siempre será coplanar (estará
en el mismo plano) a los sumandos que lo generaron.
Igualmente, podemos definir la resta de vectores al sumar el inverso. Esto es
a − b ≡ a + (−b)
⇒ 0 = a − a ≡ a + (−a) .
Bo
rr
En términos gráficos la resta de dos vectores se representa colocando los vectores (minuendo y sustraendo)
con el mismo origen y uniendo las cabezas de flecha. Dependiendo de cual vector es el minuendo y cual
sustraendo el vector resta apuntará del sustraendo hacia el minuendo, esto es, (a + b + c) − a = b + c.
Claramente, el módulo del vector resta representa la distancia entre los dos extremos de los vectores
minuendo y el sustraendo.
Un resumen de propiedades.
sigue:
Podemos resumir las (obvias) propiedades del álgebra de vectores como
La suma de vectores:
• es cerrada a + b = c
7
1.2. VECTORES, ESCALARES Y ÁLGEBRA VECTORIAL
• es conmutativa a + b = b + a,
• es asociativa (a + b) + c = a + (b + c),
• tiene un único elemento neutro 0 + a = a + 0 = a, ∀ a,
• existe un elemento simétrico −a (uno para cada vector) tal que 0 = a − a ≡ a + (−a),
• es distributiva respecto a la multiplicación por números: α (a + b) = αa + αb;
La multiplicación de números por vectores:
• es conmutativa aα = αa,
in
ar
• es asociativa α (βa) = (αβ) a,
• es distributiva (α + β) a = αa + βa.
1.2.3.
Ejercicios
1. Dado el triángulo: A = (2, 3), B = (6, 9), C = (8, 1). Utilizando álgebra vectorial encuentre:
re
lim
a) el baricentro, es decir, el punto donde se interceptan las medianas del triángulo.
b) el circuncentro, es decir, el punto donde se interceptan las mediatrices del triángulo.
2. Un punto P divide un segmento de lı́nea M N en la razón m : n. Si los vectores posición de los puntos
M y N son a y b, respectivamente. Encuentre el vector posición del punto P .
3. Los vertices de un triángulo ABC tienen como vectores posición a, b y c, respectivamente y relativos
a un origen común O. Demuestre que el vector posición g del centróide G del triángulo viene dado por
1
(a + b + c) .
3
rP
g=
4. Un paralelogramo tiene un ángulo agudo de π/3 y lados de longitud a = 1 y b = 2. Si pensamos que
esos lados como vectores a y b encuentre
ad
o
a) Encuentre los vectores: a + b y a − b.
b) Encuentre los vectores: 2a + 3b y 5a − 7b.
Bo
rr
5. Se tiene un sistema de n partı́culas de masas {mn }, y sea ri el radio vector para la i-esı́ma partı́cula
respecto al origen de coordenadas. El centro de masa del sistema estará indicado por el vector:
Pn
mi ri
rCM = Pi=1
n
i=1 mi
Encuentre el centro de masas para los siguientes sistemas:
a) Masas iguales a: 1, 2, 3 ubicadas en los vértices de un triángulo equilátero cuyos lados son de
longitud a = 2.
b) Masas iguales a: 1, 2, 3, 4 en los vértices de un cuadrado de lados a = 2.
c) Masas iguales a: 1, 2, 3, 4 en los vértices inferiores de un cubo cuyos lados son de longitud a = 2
y masas iguales a: 5, 6, 7, 8 en la vértices superiores.
8
1.3. INDEPENDENCIA LINEAL, VECTORES BASE Y EL PRODUCTO DE VECTORES
1.3.
Independencia lineal, vectores base y el producto de vectores
Armados con el álgebra y explicitando sus propiedades podemos construir la primera aproximación a uno
de los conceptos fundamentales del álgebra lineal. La noción de independencia o dependencia lineal.
1.3.1.
Vectores linealmente independientes
Diremos que tres vectores a, b, c son linealmente independientes si se cumple que
α a+β b+γ c=0
⇒
α=β=γ=0
(1.1)
re
lim
in
ar
es decir, que la única manera que al sumar cualquier múltiplo de a, b y c de manera que la suma se anule es
obligando a que los escalares sean necesariamente nulos. Si no se cumple lo anterior entonces diremos que
uno de los vectores será linealmente dependiente y por lo tanto se podrá expresar como combinación lineal
de los otros dos
α 6= 0
β 6= 0
α a + β b + γ c = 0 alguno de
⇒ c = ᾱ a + β̄ b .
γ 6= 0
Es muy importante señalar que los vectores linealmente independientes formarán una base para el espacio
donde estos vectores “viven” y el número máximo de vectores linealmente independientes será la dimensión
de ese espacio de “residencia”. Más adelante estudiaremos con más detalle el concepto de bases.
Tratemos de concretar algunas de estas afirmaciones.
Dos vectores linealmente dependientes son colineales.
rP
Es claro que:
α a + β b = 0 con alguno de
α 6= 0
β 6= 0
⇒
β
a = −αb
b = −αa
β
a = λb
ad
o
el contrario también será cierto: si dos vectores son colineales ellos serán linealmente dependientes.
⇒
αa + βb = 0
⇒
αλb + βb = 0
⇒
(αλ + β) b = 0
⇒
λ=−
β
,
α
con lo cual podremos afirmar que si dos vectores son linealmente independientes ellos no son colineales.
Tres vectores linealmente dependientes son coplanares.
Bo
rr
Por ser los tres vectores linealmente dependientes al menos uno de los escalares tiene que ser distinto
de cero, digamos γ, esto es
α a+β b+γ c=0
⇒
α
β
c = − a − b = ξ1a + ξ2b ,
γ
γ
pero como ξ 1 a ∝ a y ξ 2 b ∝ b, esto significa que ξ 1 a y a son colineales, de la misma manera que ξ 2 b
y b, y por lo tanto, la suma estará en el mismo plano.
9
1.3. INDEPENDENCIA LINEAL, VECTORES BASE Y EL PRODUCTO DE VECTORES
Dos vectores linealmente independientes expanden todos los vectores coplanares.
Dado dos vectores a y b linealmente independientes, entonces cualquier vector c, coplanar con a y b,
podrá expresarse como una combinación lineal de éstos. Diremos que c se expresa en términos de a y
b como c = ξ 1 a + ξ 2 b y esa expresión es única.
La primera de las afirmaciones es directa por cuanto hemos visto que si a y b son linealmente independientes y c es coplanar con a y b, entonces, necesariamente a, b y c son linealmente dependientes.
Esto es:
β
α
α a + β b + γ c = 0 ⇒ c = − a − b = ξ1a + ξ2b
γ
γ
debido a que a y b son linealmente independientes.
in
ar
La demostración de que la expansión es única viene de suponer que existen dos maneras distintas de
representar al mismo vector c
1
c = ξ1a + ξ2b
ξ − ζ 1 = 0 ⇒ ξ1 = ζ 1
1
1
2
2
⇒ 0= ξ −ζ a+ ξ −ζ b ⇒
2
c = ζ 1a + ζ 2b
ξ − ζ 2 = 0 ⇒ ξ2 = ζ 2
re
lim
La demostración para el caso tridimensional es equivalente. Es decir tres vectores linealmente independientes a, b y c expanden, de manera unı́voca, todos los vectores del espacio. Esta demostración queda
para el lector.
Vectores Base.
Productos de vectores
ad
o
1.3.2.
rP
Cuando un vector c se pueda expresar en términos de dos vectores linealmente independientes, a y b,
por ejemplo: c = ξ 1 a + ξ 2 b, diremos que a y b forman una base para todos los vectores coplanares
a éstos. Igualmente para el caso tridimensional: tres vectores linealmente independientes a, b y c
conformarán una base para los vectores del espacio. Los números ξ 1 y ξ 2 para el caso bidimensional se
denominan las componentes de c a lo largo de a y b, respectivamente. Equivalentemente, ξ 1 , ξ 2 , ξ 3
serán las componentes de cualquier vector para el caso 3D a lo largo de a, b y c, respectivamente. Esta
nomenclatura será más evidente luego de la próxima sección.
Hemos sumado y restado vectores, el siguiente paso es multiplicarlos. Básicamente existen dos formas de
multiplicar vectores: el producto escalar y el producto vectorial, veremos a continuación de que se trata y
sin especificar un sistema de coordenadas para referirlos.
Producto escalar
Bo
rr
1.3.3.
Denominaremos producto escalar de dos vectores a y b a un escalar cuyo valor será igual al producto de
los módulos multiplicado por el coseno del ángulo que ellos forman
ζ = a · b = |a| |b| cos(θ)ha,bi
(1.2)
El significado geométrico del producto escalar es evidente, cuadrante I de la figura 1.3. El producto escalar
representa la proyección de a sobre b y equivalentemente la proyección de b sobre a.
De esta definición se derivan varias consecuencias las cuales por obvias no dejan de ser importantes:
10
re
lim
in
ar
1.3. INDEPENDENCIA LINEAL, VECTORES BASE Y EL PRODUCTO DE VECTORES
Figura 1.3: Productos de Vectores
El producto escalar de un vector consigo mismo, siempre es positivo:
2
ζ = a · a = |a| ≥ 0, y sólo√será nulo√si a es el vector nulo. Esto es, ζ = 0
podemos concluir que |a| = a · a = ζ.
⇒
a = 0. Con esto
rP
El producto escalar es conmutativo:
ζ = a · b = b · a, ya que el ángulo entre los vectores es el mismo y la multiplicación entre escalares es
conmutativa.
ad
o
El producto escalar es distributivo:
Esto es, a · (b + c) = a · b + a · c. La demostración (gráfica) puede apreciarse en el cuadrante II de la
figura 1.3.
La multiplicación por un número:
ζ̄ = αζ = |α| (a · b) = (αa) · b = a · (αb) = |αa| |b| cos(θ)ha,bi = |a| |αb| cos(θ)ha,bi .
Bo
rr
Desigualdad de Cauchy-Schwarz.
A partir de la definición de producto interno es inmediata la comprobación de la siguiente desigualdad:
2
2
2
2
2
⇒ (a · b) ≤ |a| |b|
⇔ a · b ≤ |a| |b| ,
(1.3)
(a · b) = |a| |b| cos(θ)ha,bi
ya que 0 ≤ cos2 (θ)ha,bi ≤ 1.
Del producto escalar surge el teorema del coseno.
Es inmediato calcular el producto escalar de un vector consigo mismo, para ello vamos a suponer que
c = a + b, con lo cual
c=a+b
⇒
c · c = (a + b) · (a + b)
⇒
2
2
2
|c| = |a| + |b| + 2 |a| |b| cos(θ) ,
(1.4)
donde θ es el ángulo que forman los vectores a y b. Esto no es otra cosa que el teorema del coseno y
está ilustrado en el cuadrante III de la figura 1.3.
11
1.3. INDEPENDENCIA LINEAL, VECTORES BASE Y EL PRODUCTO DE VECTORES
Dos vectores no nulos son ortogonales (perpendiculares) si su producto escalar es nulo.
Esta afirmación es inmediata
a⊥b
1.3.4.
⇒
θha,bi =
π
2
⇒
a · b = |a| |b| cos(θ)ha,bi = 0 .
(1.5)
Producto vectorial
El módulo de c, será
|c| = |a| |b| sen(θ)ha,bi .
in
ar
A diferencia del producto escalar que genera un escalar, el producto vectorial tiene como resultado otro
vector: c = a × b (realmente un pseudovector o vector axial en contraposición a los vectores polares, pero
eso lo veremos más adelante en la sección 1.7.3), con las siguientes caracterı́sticas:
(1.6)
Es claro que el módulo de c representa el área del paralelogramo cuyos lados están formados por a y
b (ver el cuadrante V de la figura 1.3).
re
lim
Tal y como muestran los cuadrantes IV y V de la figura 1.3, c tendrá como dirección la perpendicular
al plano que forman a y b, y como sentido la regla del pulgar derecho, regla de la mano derecha, o de
manera más elegante, será positiva cuando la multiplicación de a×b corresponda al sentido antihorario.
Podemos deducir algunas consecuencias de esta definición.
El producto vectorial es anticonmutativo.
a × b = −b × a, y se sigue de la definición que expresa el cuadrante IV de la figura 1.3.
rP
El producto vectorial es distributivo respecto a la suma.
a × (b + c) = a × b + a × c. La demostración de esto lo dejaremos para más adelante.
La multiplicación por un número.
|c| = |α| |a × b| = |(αa) × b| = |a × (αb)| = |αa| |b| sen(θ)ha,bi = |a| |αb| sen(θ)ha,bi .
ad
o
Dos vectores serán colineales si su producto vectorial se anula.
Como en el caso cuando se anulaba el producto escalar identificábamos a dos vectores ortogonales,
cuando se anula el producto vectorial tendremos dos vectores paralelos. Es claro que esto se cumple de
inmediato
a k b ⇒ θha,bi = 0 ⇒ |c| = |a × b| = |a| |b| sen(θ)ha,bi = 0 .
Bo
rr
Si el módulo del vector es cero, obvio que es el vector nulo. Ahora bien, también de aquı́ deducimos
que
c = a × b ⇒ c · a = (a × b) · a = c · b = (a × b) · b = 0 .
1.3.5.
Producto triple o mixto
Analicemos ahora el número (pseudoescalar) que proviene de la multiplicación
V = c · (a × b) = |c| |(a × b)| cos(θ)hc,a×bi .
(1.7)
Este producto también cumple con algunas propiedades que enunciaremos ahora y demostraremos más tarde
12
1.3. INDEPENDENCIA LINEAL, VECTORES BASE Y EL PRODUCTO DE VECTORES
El producto mixto representa el volumen del paralelepı́pedo cuyos lados son los vectores a, b y c.
|a × b| representa el área de la base y la altura está representada por la proyección del vector c sobre
la perpendicular al plano de la base que es, precisamente |c| cos(θ)hc,a×bi .
El producto mixto es cı́clico respecto a sus factores.
(a × b) · c = (c × a) · b = (b × c) · a ;
(1.8)
Esta afirmación se verá demostrada más adelante.
El producto mixto se anula cuando se repite alguno de sus factores.
Claramente, si (a × b) ⊥ a
⇒
in
ar
(a × b) · a = (a × b) · b = (a × a) · c = (b × b) · c = 0
(a × b) · a = 0.
(1.9)
Si los tres vectores a, b y c son coplanares (linealmente dependientes) entonces:
(a × b) · c = 0 ,
re
lim
(1.10)
dicho de manera más elegante, útil e impactante: tres vectores que cumplen con:
(a × b) · c 6= 0 ,
(1.11)
son linealmente independientes y forman una base para el espacio tridimensional. Esa base se denominará levógira (contraria al giro de las manecillas del reloj) si el producto (a × b) · c < 0 y dextrógira
(la convencional base de la mano derecha) si (a × b) · c > 0.
Ejercicios
rP
1.3.6.
1. Las componentes de un vector y la regla para sumar vectores se combinan para introducir la forma
más simple de representar un vector como una combinación lineal de los vectores más elementales que
podemos tener. Estos vectores forman lo que conocemos la base canónica: {i, j, k}, vectores de longitud
unitaria que apuntan en la dirección positiva de los ejes x, y y z.
a)
ad
o
Diga, entonces, si los siguientes vectores forman una base
e1 = 2i + j − 3k ,
b)
Bo
rr
e1 = i − 3j + 2k ,
e2 = i − 4k ,
e3 = 4i + 3j − k
e2 = 2i − 4j − k ,
e3 = 3i + 2j − k
2. ¿Los siguientes vectores son linealmente independientes?
a = (0, 2, −1) ,
b = (0, 1/2, −1/2) ,
c = (0, −2/3, −1/3) .
3. Un paralelogramo tiene un ángulo agudo de π/4 y lados a = 1, b = 2. Si consideramos que los lados
son vectores, encuentre:
a) El área del paralelogramo.
b) La proyección de cada lado sobre la dirección del otro.
13
1.4. COMPONENTES, COORDENADAS Y COSENOS DIRECTORES
4. Considere un triángulo cuyos lados están conformados por los vectores a, b y c = a+b. Con el producto
vectorial entre ellos demuestre la ley del seno:
a
b
c
=
=
sin(α)
sin(β)
sin(γ)
donde α, β, γ son los ángulos opuestos a los lados a, b, c respectivamente.
5. Demuestre que el volumen de un tetraedro puede escribirse de la manera siguiente:
1.4.
1
|a · (b × c)|
6
in
ar
V =
Componentes, coordenadas y cosenos directores
1.4.1.
re
lim
La formulación de las leyes fı́sicas debe hacerse en término de cantidades vectoriales (tensoriales). Esto
independiza su formulación de un sistema particular de coordenadas, pero llegado el momento de calcular
valores y utilizar estas leyes, es mucho más conveniente referirla a un sistema de coordenadas particularmente
adaptado a la geometrı́a del problema. En ese caso la ecuación vectorial se convertirá en tantas ecuaciones
como componentes (referidas al sistema de coordenadas utilizado) tengan los vectores en ese sistema de
coordenadas.
Bases, componentes y coordenadas
rP
Tal y como mencionamos anteriormente, tres vectores no coplanares cualesquiera son linealmente independientes y constituyen una base para el espacio tridimensional. Denominaremos a estos vectores base como
{wi }, y por ser linealmente independientes podremos expresar cualquier vector A como una combinación
lineal única, tal y como lo mostramos en el cuadrante I de la figura 1.4.
Con los vectores base {w1 , w2 , w3 } podemos construir un sistema (oblicuo en general) de coordenadas
al colocarlos con un mismo origen, esto es
a = ξ 1 w1 + ξ 2 w2 + ξ 3 w3
(1.12)
ad
o
donde las cantidades ξ 1 , ξ 2 , ξ 3 son números (no son escalares) que representan las componentes del vector
a a lo largo de cada uno de los vectores base {w1 , w2 , w3 }. Nótese que por costumbre (la cual será evidente
más adelante) etiquetamos estos números con superı́ndices y la letra que identifica el vector.
−−→
Más aún, cada punto P del espacio viene definido por un radiovector
r (P ) ≡ OP que une el origen
de coordenadas con el punto P y se le asocian ntres números o x1 , x2 , x3 , los cuales son las proyecciones
a lo largo de cada uno de los ejes coordenados 0x1 , 0x2 , 0x3 . Los números x1 , x2 , x3 se denominarán
Bo
rr
componentes de r (P ) en el sistema de referencia {w1 , w2 , w3 }.
Existe una familia de sistemas de coordenadas en la cual sus vectores base son ortogonales (o mejor
ortonormales), es decir los vectores base {e1 , e2 , e3 } son perpendiculares entre si. Tal y como mostraremos
más adelante, siempre se puede construir un sistema ortogonal {e1 , e2 , e3 } u ortonormal {i1 , i2 , i3 } a partir
de una base genérica de vectores linealmente independientes {w1 , w2 , w3 }. Cuando el sistema sea ortogonal
sus componentes se denominarán rectangulares. Dependiendo del signo del triple producto mixto el sistema
de coordenadas será dextrógiro ((e1 × e2 ) · e3 > 0) o levógiro ((e1 × e2 ) · e3 < 0), tal y como se muestra en
el cuadrante III de la figura 1.4.
14
re
lim
in
ar
1.4. COMPONENTES, COORDENADAS Y COSENOS DIRECTORES
Figura 1.4: Vectores, bases y componentes
rP
Es costumbre ancestral, 1 utilizar la convención dextrógira donde el producto: (e1 × e2 ) · e3 > 0, y en
ese caso utilizamos el bien conocido conjunto de vectores unitarios {i, j, k} con los que ya hemos estado
familiarizados
a = ax i + ay j + az k y r (P ) = x i + y j + z k .
(1.13)
También es costumbre representar este sistema de coordenadas ortonormal como: i ≡ i1 , j ≡ i2 y k ≡ i3
para recordar que estamos en un sistema de coordenadas cartesianas y utilizaremos los superı́ndices 1, 2, 3
para indicar las componentes del vector.
ad
o
a = a1 i1 + a2 i2 + a3 i3
y
r (P ) = x1 i1 + x2 i2 + x3 i3 .
Obviamente el módulo del vector se podrá expresar con la utilización del teorema de Pitágoras
p
p
|a| = (a1 )2 + (a2 )2 + (a3 )2 y |r (P )| = (x1 )2 + (x2 )2 + (x3 )2 ,
Bo
rr
y la multiplicación por un número será
αa = α a1 i1 + a2 i2 + a3 i3 = αa1 i1 + αa2 i2 + αa3 i3
⇒ |αa| = α
(1.14)
(1.15)
p
(a1 )2 + (a2 )2 + (a3 )2 .
Igualmente para un vector unitario
ûa =
a
a1 i1 + a2 i2 + a3 i3
=p
,
|a|
(a1 )2 + (a2 )2 + (a3 )2
(1.16)
con lo cual todo vector
a = |a| ûa =
p
(a1 )2 + (a2 )2 + (a3 )2 ûa .
1 Quizá por las arraigadas relaciones de dominación de los derechos sobre los izquierdos (en latı́n e italiano los zurdos son
siniestros), o quizá tal vez por conservar la definición de volumen como positivo.
15
1.4. COMPONENTES, COORDENADAS Y COSENOS DIRECTORES
1.4.2.
Cosenos directores
Como se puede apreciar en el cuadrante IV de la figura 1.4, podemos construir tres triángulos rectángulos
con el radiovector a (P ) como hipotenusa de cada uno de ellos. Los ángulos que forma el radiovector a (P )
con cada uno de los ejes coordenados {x, y, z} son {α, β, γ} respectivamente, con lo cual
ax = |a| cos(α) ,
ay = |a| cos(β)
y
pero además
1.4.3.
⇒
cos2 (α) + cos2 (β) + cos2 (γ) = 1 ,
a
= cos(α) i + cos(β) j + cos(γ) k .
|a|
(1.17)
(1.18)
in
ar
ûa =
az = |a| cos(γ)
Una división fallida
1.4.4.
re
lim
Uno esperarı́a que para cada una de las definiciones de productos vectoriales, existiera el vector cociente,
es decir, que pudiéramos “despejar” uno de los vectores multiplicados en términos del otro. La situación es
que esta operación no está definida unı́vocamente y lo podemos intuir a partir de una de la definición del
producto escalar.
Supongamos que tenemos que: ζ = a · b con lo cual, si pudiéramos “despejar”, digamos b = ζ/a
ζ
+d ,
¿Tendrı́amos entonces definido b de una manera unı́voca? La respuesta es NO, ya que ζ = a ·
a
ζ
donde a ⊥ d, por lo cual existen infinitos b = + d que cumplen ζ = a · b.
a
Ejercicios
1. Encuentre el ángulo entre los vectores a = i + 2j + 3k y b = 9i + 8j + 7k.
rP
2. Con la definición del producto escalar entre vectores, demuestre que si θ es el ángulo entre los vectores
a y b, entonces:
a1 b1
a 2 b2
a3 b3
+
+
.
cos(θ) =
ab
ab
ab
Donde las cantidades ai /a y bi /b son los cosenos directores de a y b respectivamente.
ad
o
3. Encuentre la distancia del punto P al origen si P viene dado por el vector posición r = 2i + 4j − 3k. Y
si para un punto arbitrario el vector posición es r = xi + yj + zk ¿Qué superficie describe éste vector
cuando |r| = 3?
4. Encuentre los cosenos directores y los correspondientes ángulos para los siguientes vectores
a) a = i + j + k
Bo
rr
b) b = i − 2j + 2k
c) c = 4i − 2j + 3k
5. Sea {i1 , i2 , i3 } una base ortonormal dextrógira. Verifique que los vectores
a = i + 2j + 3k ,
b = i + 5j ,
c = 3i + 2j + k .
forman una base ¿Esta base será del tipo dextrógiro o levógiro?
16
1.5. ALGEBRA VECTORIAL Y COORDENADAS
1.5.
Algebra vectorial y coordenadas
Es posible reescribir toda el álgebra vectorial que hemos visto mediante operaciones referidas a sistemas de
coordenadas, como mostraremos a continuación. Por simplicidad, anclaremos nuestro sistema de coordenadas
a la base canónica {ii }.
1.5.1.
Suma y resta de vectores
in
ar
Para los vectores a = a1 i1 + a2 i2 + a3 i3 y b = b1 i1 + b2 i2 + b3 i3 , la suma será representada por
a + b = a1 i1 + a2 i2 + a3 i3 + b1 i1 + b2 i2 + b3 i3 = a1 + b1 i1 + a2 + b2 i2 + a3 + b3 i3
(1.19)
y obviamente, la resta
a − b = a1 i1 + a2 i2 + a3 i3 − b1 i1 + b2 i2 + b3 i3 = a1 − b1 i1 + a2 − b2 i2 + a3 − b3 i3
con lo cual la distancia entre dos puntos P y M será
1.5.2.
q
2
2
2
(x1 − y 1 ) + (x2 − y 2 ) + (x3 − y 3 ) .
(1.21)
re
lim
d (P, M ) = |(r (P ) = a) − (r (M ) = b)| =
(1.20)
Dependencia e independencia lineal
Ahora es fácil estudiar la dependencia o independencia lineal en coordenadas. Otra vez, tres vectores:
a = a1 i1 + a2 i2 + a3 i3 , b = b1 i1 + b2 i2 + b3 i3 y c = c1 i1 + c2 i2 + c3 i3 , serán linealmente independientes si se
cumple que
α a + β b + γ c = 0 ⇒ α = β = γ = 0.
(1.22)
Antes de proseguir en forma general, veamos algunos casos particulares
rP
La base canónica: i1 = i ≡ (1, 0, 0) , i2 = j ≡ (0, 1, 0) , i3 = k ≡ (0, 0, 1). Estos vectores son claramente
linealmente independientes y por lo tanto constituyen una base.
Consideremos los vectores: e1 = i ≡ (1, 0, 0) , e2 = i + j ≡ (1, 1, 0) , e3 = i + j + k ≡ (1, 1, 1), al escribir
el sistema de ecuaciones resulta:
α + β = 0,
α+β+γ =0
ad
o
α = 0,
⇒
α = 0,
β = 0,
γ = 0,
con lo cual demostramos que son linealmente independientes y por lo tanto constituyen una base para
los vectores tridimensionales.
Bo
rr
En general tendremos que
0 = α a1 i1 + a2 i2 + a3 i3 + β b1 i1 + b2 i2 + b3 i3 + γ c1 i1 + c2 i2 + c3 i3
= αa1 + βb1 + γc1 i1 + αa2 + βb2 + γc2 i2 + αa3 + βb3 + γc3 i3
αa1 + βb1 + γc1 = 0
αa2 + βb2 + γc2 = 0
⇒
αa3 + βb3 + γc3 = 0
Esto no es otra cosa que un sistema de 3 ecuaciones lineales con 3 incógnitas: {α, β, γ} y la solución que
estamos buscando α = β = γ = 0 se cumplirá si
1 1 1 a b c 2 2 2 a b c = a1 b2 c3 − b3 c2 + a2 b3 c1 − b1 c3 + a3 b1 c2 − b2 c1 6= 0 .
3 3 3 a b c 17
1.5. ALGEBRA VECTORIAL Y COORDENADAS
1.5.3.
Productos de Vectores en coordenadas
Producto escalar
Ahora refrasearemos, en término de una base de vectores ortogonales, lo expresado en la sección 1.3.3.
Representaremos el producto escalar de dos vectores en una base cartesiana {i1 , i2 , i3 }, que es una base
ortonormal, de la siguiente manera:
a · b = a1 i1 + a2 i2 + a3 i3 · b1 i1 + b2 i2 + b3 i3 = a1 b1 + a2 b2 + a3 b3
(1.23)
ya que por ser ortogonales se tiene que:
y
in
ar
i1 · i1 = i2 · i2 = i3 · i3 = 1 ,
i1 · i2 = i2 · i1 = 0
i1 · i3 = i3 · i1 = 0
i2 · i3 = i3 · i2 = 0
(1.24)
Las propiedades del producto escalar en coordenadas cartesianas se comprueban fácilmente
El producto escalar de un vector consigo mismo, siempre es positivo.
2
y
re
lim
ζ = a · a = |a| = (a1 )2 + (a2 )2 + (a3 )2 ≥ 0 ,
(a1 )2 + (a2 )2 + (a3 )2 = 0 ⇒ a1 = a2 = a3 = 0
p
√
√
Adicionalmente |a| = ζ = a · a = (a1 )2 + (a2 )2 + (a3 )2 .
El producto escalar es conmutativo
⇔
a = 0.
rP
ζ = a · b = b · a = a1 b1 + a2 b2 + a3 b3 = b1 a1 + b2 a2 + b3 a3 .
El producto escalar es distributivo:
a · (b + c) = a1 i1 + a2 i2 + a3 i3 · b1 + c1 i1 + b2 + c2 i2 + b3 + c3 i2 ,
ad
o
por lo tanto:
a1 b1 + c1 + a2 b2 + c2 + a3 b3 + c3
=
1 1
2 2
3 3
1 1
2 2
3 3
= a b +a b +a b + a c +a c +a c
=
(1.25)
(1.26)
(1.27)
a1 b1 + a1 c1 + a2 b2 + a2 c2 + a3 b3 + a3 c3
a · b + a · c.
La multiplicación por un escalar.
Bo
rr
|α| (a · b) = (αa)·b = a·(αb) = αa1 b1 + αa2 b2 + αa3 b3 = a1 αb1 +a2 αb2 +a3 αb3 (1.28)
Desigualdad de Cauchy Schwarz.
a · b = a1 b1 + a2 b2 + a3 b3 ≤
p
(a1 )2 + (a2 )2 + (a3 )2
p
(b1 )2 + (b2 )2 + (b3 )2 = |a| |b|
(1.29)
Diremos que dos vectores, no nulos son ortogonales (perpendiculares) si su producto escalar es nulo.
Esta afirmación es inmediata
π
a ⊥ b ⇒ θha,bi =
⇒ a · b = |a| |b| cos(θ)ha,bi = 0 ,
(1.30)
2
18
1.5. ALGEBRA VECTORIAL Y COORDENADAS
por lo cual
a1 b1 +a2 b2 +a3 b3 = |a| |b| cos(θ)ha,bi
⇒
cos(θ)ha,bi = p
a1 b1 + a2 b2 + a3 b3
p
(a1 )2 + (a2 )2 + (a3 )2 (b1 )2 + (b2 )2 + (b3 )2
de donde se deduce que para dos vectores perpendiculares
⇒
a⊥b
0 = a 1 b1 + a 2 b2 + a 3 b3 .
⇒
c=a+b
c · c = (a + b) · (a + b)
⇒
2
2
2
in
ar
Del producto escalar surge el Teorema del Coseno. Es inmediato generalizar el producto escalar de un
vector consigo mismo, para ello suponemos que c = a + b, con lo cual
|c| = |a| + |b| + 2 |a| |b| cos(θ)ha,bi ,
(1.31)
que no es otra cosa que el teorema del coseno y está ilustrado en el cuadrante III de la figura 1.3.
Producto vectorial
re
lim
De igual manera, lo que aprendimos en la sección 1.3.4 ahora lo expresamos en términos de las componentes de los vectores en una base ortonormal de la forma
c = a × b = a2 b3 − a3 b2 i1 + a3 b1 − a1 b3 i2 + a1 b2 − a2 b1 i3 ,
(1.32)
con lo cual
q
matriz
i2
a2
b2
rP
lo anterior se puede organizar como el determinante de la
i1
c = a × b = a1
b1
2
i3
a3
b3
,
2
(1.33)
2
(a2 b3 − a3 b2 ) + (a3 b1 − a1 b3 ) + (a1 b2 − a2 b1 )
p
p
=
(a1 )2 + (a2 )2 + (a3 )2 (b1 )2 + (b2 )2 + (b3 )2 sen(θ)ha,bi .
|c| =
ad
o
Triple producto mixto
multiplicación
c2 c3 a2 a3 .
b2 b3 (1.34)
Bo
rr
Finalmente, analicemos el número (pseudoescalar) que proviene de la
1
c
V = c · (a × b) = |c| |a × b| cos(θ)hc,a×bi = a1
b1
Obviamente, este número representa del volumen del paralelepı́pedo cuyos lados quedan definidos por los
vectores: a, b y c.
Practicando con Maxima:
Con el programa de manipulación simbólica Maxima haremos algunos cálculos sencillos con vectores. Se
recomienda ver el apéndice 2.1 como introducción al programa.
Dados los vectores, en coordenadas cartesianas: a = i + 2j + 3k y b = 7i + 8j + 9k.
(%i1) a:[1,2,3];
19
1.5. ALGEBRA VECTORIAL Y COORDENADAS
( %o1) [1, 2, 3]
(%i2) b:[7,8,9];
( %o2) [7, 8, 9]
La multiplicación por escalares y suma es simple, si queremos calcular α a + β b, escribimos:
(%i3) alpha*a + beta*b;
( %o3) [7 β + α, 8 β + 2 α, 9 β + 3 α]
in
ar
Para el producto escalar procedemos utilizando el operador punto, como se muestra a continuación.
(%i4) a.b;
( %o4) 50
(%i5) load(vect)$
re
lim
El cálculo de producto vectorial no es tan obvio, debemos cargar previamente la librerı́a vect.
El operador para el producto vectorial es una tilde y además debemos utilizar la función express. Para
hacer a × b, ejecutamos los siguientes comandos:
(%i6) express(a~b);
( %o6) [−6, 12, −6]
(%i7) sqrt(a.a);
√
( %o7) 14
√
a·a
rP
La norma de un vector, como ya vimos, es:
ad
o
Si tenemos otro vector, digamos c = −4i + 5j − 6k, el producto triple: a · b × c se calcula ası́:
(%i8) c:[-4,5,-6];
( %o8) [−4, 5, −6]
(%i9) a.express(b~c);
Bo
rr
( %o9) 120
El ángulo entre los vectores a y b, es
θ = arc cos
a·b
|a||b|
.
En Maxima usamos la función acos(x) para el arcocoseno(x). Consultar el manual del programa para ver
el resto de las funciones trigonométricas.
(%i10)acos((a.b)/(sqrt(a.a)*sqrt(b.b)));
20
1.5. ALGEBRA VECTORIAL Y COORDENADAS
( %o10) acos
50
√ √
14 194
Seguramente lo queremos es el valor numérico, esto se hace agregando la función float. Con la siguiente
sintaxis logramos el objetivo:
(%i11)acos((a.b)/(sqrt(a.a)*sqrt(b.b))),float;
( %o11) 0,2858867976945064
Ejercicios
1. Dados los vectores
a = i1 + 2i2 + 3i3 ,
b = 4i1 + 5i2 + 6i3 ,
c = 3i1 + 2i2 + i3 ,
a) Encuentre
a + b − c − d,
a − b + c − d,
d = 6i1 + 5i2 + 4i3 .
−a + b − c + d .
re
lim
a + b + c + d,
in
ar
1.5.4.
b) El ángulo entre los vectores a, b, c, d y los vectores base i1 , i2 , i3 .
c) La magnitud de los vectores a, b, c, d.
d ) El ángulo entre a y b y entre c y d.
e) La proyección de a sobre b.
f ) ¿Son los vectores a, b, c, d coplanares?
rP
g) Encuentre (a + b) · (c + d)
h) Los productos a × b, b × c, c × d y los ángulos que estos forman con d.
i ) c · (a × b).
2. Verifique la desigualdad triangular: |a + b| ≤ |a| + |b|, para los siguientes vectores
ad
o
a) a = i + 2j + 3k y b = 2i + j + 7k.
b) a = 2i − j − 2k y b = 3i + 2j + 3k.
3. Si a y b son vectores arbitrarios y α y β escalares, demuestre que
Bo
rr
|αa + βb|2 ≤ α2 |a|2 + 2αβ(a · b) + β 2 |b|2 .
4. Si a, b, c y d son vectores arbitrarios y α, β, γ escalares que satisfacen
α(b × c) + β(c × a) + γ(a × b) + d = 0 ,
demuestre que si a, b y c son linealmente independientes, entonces
α=−
a·d
,
a · (b × c)
β=−
b·d
,
a · (b × c)
γ=−
c·d
.
a · (b × c)
21
in
ar
1.6. APLICACIONES DEL ÁLGEBRA VECTORIAL
re
lim
Figura 1.5: Geometrı́a analı́tica y vectores cartesianos
5. Si a, b, c y d son vectores arbitrarios y α, β, γ escalares que satisfacen
αa + βb + γc + d = 0 ,
demuestre que si a, b y c son linealmente independientes, entonces
d · (b × c)
,
a · (b × c)
β=−
d · (c × a)
,
a · (b × c)
rP
α=−
γ=−
d · (a × b)
.
a · (b × c)
Ayuda: tome el producto escalar de la ecuación con b × c, a × c y a × b.
1.6.
ad
o
6. Demuestre que los vectores a = i+2j+k, b = 2i−j−k y c = 4i+3j+k son linealmente independientes.
Escoja un vector d y verifique los resultados de los dos últimos ejercicios.
Aplicaciones del álgebra vectorial
Bo
rr
Uno de los terrenos más exitosos de las aplicaciones del álgebra vectorial es la geometrı́a analı́tica. Esto
se realiza en base a la definición que hiciéramos de radio vector, en la cual a cada punto, P, del espacio le
asociábamos un radiovector posición tal y como lo mostramos en el cuadrante I de la figura 1.4 .
P ←→ (x, y, z) ≡ x1 , x2 , x3
⇒ r (P ) = x i + y j + z k = x1 i1 + x2 i2 + x3 i3 = xi ii
A partir de esta definición todas las propiedades geométricas del espacio las podemos construir con vectores.
1.6.1.
Rectas y vectores
La ecuación de la recta en término de vectores la definiremos fijando uno de sus puntos, digamos:
r (P1 ) ≡ x (P1 ) = x1 = x1 i + y1 j + z1 k = x1(1) i1 + x2(1) i2 + x3(1) i3 ←→ (x1 , y1 , z1 ) ,
22
1.6. APLICACIONES DEL ÁLGEBRA VECTORIAL
y un vector que indique su dirección, digamos a = a1 i + a2 j + a3 k (ver cuadrante I de la figura 1.5) con
lo cual la ecuación de una recta en lenguaje vectorial será:
1
x = x1 + λa
y = y1 + λa2
x = x1 + λa ⇒ x1 i + y1 j + z1 k + λ a1 i + a2 j + a3 k
⇒
(1.35)
z = z1 + λa3
in
ar
donde x = x i + y j + z k es el conjunto de puntos genéricos que cumple con la ecuación de la recta en 3D.
Existe una manera más elegante, como veremos en la sección siguiente, de reescribir las ecuaciones
anteriores utilizando la notación de ı́ndices, las ecuaciones ahora son más evidentes:
xi ii = xi(1) ii + λai ii ⇒ xi = xi(1) + λai ,
para i = 1, 2, 3 .
(1.36)
donde: (x, y, z) ≡ x1 , x2 , x3 y (i, j, k) ≡ (i1 , i2 , i3 ).
Nótese que efectivamente se cumplen tres ecuaciones escalares y cada una de ellas tiene la forma de una
recta. Además, tal y como se muestra la figura 1.5 el punto genérico (x, y, z) lo describe (sobre la recta) la
variación del módulo de a mediante la constante de proporcionalidad λ. Si se requiere describir una recta
que pase por dos puntos: (x1 , y1 , z1 ) y (x2 , y2 , z2 ) entonces una vez seleccionado uno de los puntos (digamos
(x1 , y1 , z1 )) seleccionamos el vector a = r (P2 ) − r (P1 ) como la resta de los dos radiovectores a los puntos
P2 y P1 . Esto es
x1 − x
x1 + δx2
, con δ =
.
(1.37)
x = x1 + λ (x2 − x1 ) ⇒ x =
1−δ
x2 − x
Aquı́ la división entre vectores δ tiene sentido porque no es una división entre vectores genéricos es
una división entre vectores que tienen la misma dirección Nótese además que, lo mismo ocurre cuando
“despejamos” λ de la ecuación de la recta
⇒
λ=
x − x1
a
⇒
rP
re
lim
x = x1 + λa
xi = xi(1) + λai
⇒
λ=
xi − xi(1)
ai
=
x − x1
y − y1
z − z1
=
=
,
1
2
a
a
a3
(1.38)
y equivalentemente ocurre cuando “despejamos” λ de la ecuación de la recta que pasa por dos puntos.
x − x1
x2 − x1
1.6.2.
⇒
xi = xi(1) + λ xi(2) − xi(1)
ad
o
λ=
⇒
λ=
xi − xi(1)
xi(2)
−
xi(1)
=
y − y1
z − z1
x − x1
=
=
.
x2 − x1
y2 − y1
z2 − z1
(1.39)
Planos y vectores
Bo
rr
Ocurre exactamente lo mismo cuando construimos la ecuación vectorial para un plano. En general una
superficie la define su vector normal (perpendicular). En el caso de una superficie plana (un plano) tendrá
una única normal que lo define, por lo tanto, un plano vendrá definido por su vector perpendicular en un
punto, digamos Q = P1 : (x1 , y1 , z1 ). La ecuación vectorial del plano vendrá definida por todos los vectores
−−→
P Q tales que sean perpendiculares a un determinado vector a (ver cuadrante II de la figura 1.5). Donde
el punto P es un punto genérico (x, y, z) que define un radiovector. La ecuación vectorial del plano será
simplemente
−−→
a · P Q = a · r (P ) − r (P1 ) = 0 ⇔ a · (r − r1 ) = 0 ⇔ a · r = a · r1 .
| {z }
| {z }
b
b
23
1.6. APLICACIONES DEL ÁLGEBRA VECTORIAL
Esto es, se tiene que cumplir la condición
a1 i + a2 j + a3 k · [(x i + y j + z k) − (x1 i + y1 j + z1 k)] = 0
a1 i + a2 j + a3 k · [(x − x1 ) i + (y − y1 ) j + (z − z1 ) k] = 0
a1 (x − x1 ) + a2 (y − y1 ) + A3 (z − z1 ) = 0
con lo cual la ecuación del plano queda como siempre la hemos conocido
⇒
a1 x + a2 y + a3 z = b = a1 x1 + a2 y1 + a3 z1 ,
de manera más compacta
ai xi − aj xj(1) = 0
⇒
ak xk = b = al xl(1) .
(1.40)
in
ar
a1 x + a2 y + a3 z − a1 x1 − a2 y1 − a3 z1 = 0
(1.41)
y la ecuación vectorial del plano vendrá dada por
re
lim
Es claro que a · r1 = b es la proyección del radiovector r (P1 ) sobre la perpendicular que define al plano. Por
lo tanto será la distancia entre el plano y el origen de coordenadas. Si b = 0 el plano pasa por el origen de
coordenadas.
Consideremos ahora el cuadrante III de la figura 1.5. Allı́ están especificados tres puntos en el espacio
caracterizados por sus correspondientes radiovectores posición: r (P1 ) = r1 , r (P2 ) = r2 y r (P3 ) = r3 . Estos
tres puntos serán coplanares si
m
n
n
l
l
(r1 − r2 ) · [(r2 − r3 ) × (r3 − r1 )] = 0 ⇔ εmnl (xm
(1.42)
1 − x2 ) (x2 − x3 ) x3 − x1 = 0 ,
(1.43)
rP
(r − r1 ) · [(r2 − r1 ) × (r3 − r1 )] = 0 .
Ejemplo:
ad
o
Un plano viene determinado por los puntos A = (1, 1, 1), B = (1, 2, 3) y C = (0, 0, 0). Para encontrar la
ecuación del plano podemos hacer lo siguiente:
Encontremos el vector posición de los puntos A y B,
rAB = B − A = (0, 1, 2) ,
rAC = C − A = (−1, −1, −1) ,
un vector normal al plano es:
n = rAB × rAC = (1, −2, 1) ,
Bo
rr
Para la ecuación del plano, podemos escoger el vector a = (1, 1, 1) por lo que tenemos entonces que:
n·r=n·a
1.6.3.
⇒
(1, −2, 1) · (x, y, z) = (1, −2, 1) · (1, 1, 1)
⇒
x − 2y + z = 0 .
Ejercicios
1. Para las rectas dadas a continuación encuentre los vectores posición para dos puntos diferentes sobre
la recta y un vector unitario paralelo a la recta L.
a) L :
3x−1
4
=
2y+3
2
= 2 − 3z
24
1.7. ÁLGEBRA VECTORIAL CON ÍNDICES
b) L :
2x+1
3
=
3y+2
3
=
2−4z
−1
2. Dada una linea recta L1 que pasa a través de los puntos (−2, 3, 1) y (1, 4, 6) encuentre:
a) El vector posición de un punto sobre la recta y un vector paralelo a ésta.
b) Una recta L2 paralela a L1 y que pase por el punto (1, 2, 1)
3. Una linea recta tiene como ecuación vectorial: r = a + λb, donde a = 3j + 2k y b = 2i + j + 2k.
Encuentre la ecuación cartesiana de la recta y las coordenadas de tres puntos sobre la recta.
in
ar
4. Una linea recta pasa por el punto (3, 2, −3) y paralela al vector a = 2i + 3j − 3k. Encuentre la ecuación
cartesiana de la recta y las coordenadas de tres puntos sobre la recta.
5. Encuentre la ecuación del plano con normal a y que contiene el punto P cuando:
a) a = 2i − 3j + k, P = (1, 0, 1)
b) a = i − 2j + 2k, P = (2, −3, 4)
re
lim
6. Dado un plano que pasa por el punto (2, 3, −5) y con vector normal a = 2i + k, encuentre la forma
cartesiana de la ecuación del plano.
7. El ángulo entre dos planos se define como el ángulo entre sus normales. Encuentre el ángulo entre los
siguientes planos
a) x + 3y + 2z = 4 y 2x − 5y + z = 2
b) 3x + 2y − 2z = 4 y 2x + y + 2z = 1
8. Demuestre que la ecuación de una esfera puede expresarse como
rP
|r − c|2 = (r − c) · (r − c) = a2 ,
donde c es el vector posición del centro de la esfera y a el radio.
Álgebra vectorial con ı́ndices
ad
o
1.7.
Antes de comenzar con la presentación de este esquema de cálculo cabe aclarar algunas costumbres y
convenciones con la notación de ı́ndices.
1.7.1.
Convención de Einstein
Bo
rr
El convenio de suma de Einstein, es una simplificación que se utiliza para abreviar la escritura de las
sumatorias, en el que se suprime el sı́mbolo de sumatoria y consiste en lo siguiente:
1. Los ı́ndices repetidos (arriba y abajo) indicarán suma por los valores que tomen los ı́ndices. Las componentes de los vectores tendrán ı́ndices arriba y los vectores base abajo:
a = a1 e1 + a2 e2 + a3 e3 =
3
X
am em
⇔
a = am em = ai ei .
(1.44)
m=1
25
1.7. ÁLGEBRA VECTORIAL CON ÍNDICES
2. Los ı́ndices repetidos son mudos (no importa las letras que los etiquete) y representan suma. Ası́
k j aj = k m am = k 1 a1 + k 2 a2 + k 3 a3 = b .
(1.45)
En este punto del discurso, la posición de los ı́ndices (arriba y abajo) solo tiene sentido estético y solo
ası́ indican suma. Más adelante veremos que representan cantidades distintas.
3. Llamaremos contracción cuando sumamos respecto a un par de ı́ndices, vale decir:
X
Aii = A11 + A22 + A33 =⇒ Aii = A11 + A22 + A33 .
(1.46)
in
ar
i
re
lim
Las cantidades con dos o más ı́ndices las llamaremos componentes de tensores, y deben entenderse como
arreglos bidimensionales (tridimensionales, tetradimensionales, según el número de ı́ndices). Estas cantidades
serán considerados en detalle posteriormente. Por ahora, contentémonos con saber qué cosas son cantidades
con dos ı́ndices. Es claro que la contracción de ı́ndices convierte un conjunto de números (i × j) → 1, en un
sólo número.
Los ı́ndices libres (aquellos que no están sumados) indican el número de objetos disponibles y deben
mantenerse. Por ejemplo:
1
K1 A1 + K12 A2 + K13 A3 = B1
K21 A1 + K22 A2 + K23 A3 = B2
Bi = Kik Ak ⇔
1
K1 A1 + K12 A2 + K13 A3 = B1
=0
δki
=
1
K1j
δ11
|{z}
=1
es decir
+
1
K2j
=0
=0
=0
=0
=0
z}|{
z}|{
z}|{
z}|{
z}|{
z}|{
1
2
2
2
3
3
3
δ12 + K3j
δ13 + K1j
δ21 + K2j
δ22 + K3j
δ23 + K1j
δ31 + K2j
δ32 + K3j
δ33 ,
|{z}
|{z}
=1
=1
ad
o
k
Kij
rP
con lo cual Bi = Kik Ak representa 3 ecuaciones. La operación Bij = Kik Akj representa 9.
La delta de Kronecker2 es un objeto matemático de dos ı́ndices, representa δik = 1 si i = k, y es nula en
los otros casos. Por ejemplo:
k i
k
i
1
2
3
Kij
δk = Kkj
= Kij
= K1j
+ K2j
+ K3j
.
Bo
rr
Además de la delta de Kronecker introduciremos el sı́mbolo de permutación de Levi-Civita3 εijk para el
caso de tres dimensiones: i, j, k = 1, 2, 3
+1 cuando {(i, j, k) = (1, 2, 3) ; (3, 1, 2) ; (2, 3, 1)} permutación cı́clica
−1 cuando {(i, j, k) = (1, 3, 2) ; (3, 2, 1) ; (2, 1, 3)} permutación impar o anticı́clica
εijk = εijk =
0 cuando {i = j , i = k ∧ j = k}
y quiere decir que es distinto de cero cuando todos los ı́ndices son diferentes. Toma el valor 1 si la permutación
de ı́ndices es cı́clicas (o par) y toma el valor −1 si la permutación es anticı́clica (o impar).
2 LEOPOLD KRONECKER (7 diciembre 1823 Legnica, Polonia, 29 diciembre 1891, Berlin, Alemania) Matemático polaco con
importantes contribuciones en teorı́a de números, funciones elı́pticas y álgebra, ası́ como la interrelación entre estas disciplinas.
3 TULLIO LEVI-CIVITA (1873 Padova, Veneto, 1941 Roma, Italia) Geómetra italiano y uno de los desarrolladores del cálculo
tensorial que más tarde serı́a utilizado por Einstein y Weyl como el lenguaje de la Relatividad General.
26
1.7. ÁLGEBRA VECTORIAL CON ÍNDICES
Si queremos calcular, por ejemplo: ci = εijk aj bk , entonces resulta:
c1 = ε111 a1 b1 + ε112 a1 b2 + ε113 a1 b3 + ε121 a2 b1 + ε122 a2 b2 + ε123 a2 b3 + ε131 a3 b1 + ε132 a3 b2 + ε133 a3 b3
c2 = ε211 a1 b1 + ε212 a1 b2 + ε213 a1 b3 + ε221 a2 b1 + ε222 a2 b2 + ε223 a2 b3 + ε231 a3 b1 + ε232 a3 b2 + ε233 a3 b3
c3 = ε311 a1 b1 + ε312 a1 b2 + ε313 a1 b3 + ε321 a2 b1 + ε322 a2 b2 + ε323 a2 b3 + ε331 a3 b1 + ε332 a3 b2 + ε333 a3 b3
con lo cual
in
ar
1
c = ε123 a2 b3 + ε132 a3 b2 = a2 b3 − a3 b2
c2 = ε231 a3 b1 + ε213 a1 b3 = a3 b1 − a1 b3
ci = εijk aj bk ⇒
3
c = ε312 a1 b2 + ε321 a2 b1 = a1 b2 − a2 b1
A continuación enumeramos algunas propiedades de la delta de Kronecker y del sı́mbolo de permutación
de Levi-Civita, dejamos al lector su demostración. Ellas son:
δjj = 3 ,
εjmn εimn = 2δji ,
εijk εijk = 6 .
1.7.2.
Los vectores y los ı́ndices
re
lim
εjkm εilm = δji δkl − δki δjl = δji δkl − δjl δki ,
Sumas de vectores
rP
Disponemos ahora de una manera más elegante para escribir ecuaciones que involucren vectores. Veamos
que forma toma el álgebra vectorial con esta nueva notación.
Producto escalar
con i = 1, 2, 3 .
(1.47)
ad
o
La suma de vectores será expresada de la siguiente manera
a + b = ai ei + bi ei = ai + bi ei = ci ei ⇒ ci = ai + bi
A partir da ahora y de forma equivalente, expresaremos el producto escalar en término de los ı́ndices. De
forma y manera que
a · b = |a| |b| cos(θ)ab = ai bi con i = 1, 2, 3 .
(1.48)
Bo
rr
Producto vectorial
En términos de ı́ndices, la componente i del producto vectorial se puede expresar como
i
ci = (a × b) = εijk aj bk
con i, j, k = 1, 2, 3 .
(1.49)
todas las particularidades de producto vectorial ahora descansan en las propiedades del sı́mbolo de Levy
Civita.
27
1.7. ÁLGEBRA VECTORIAL CON ÍNDICES
Triple producto mixto
Analicemos ahora el número (pseudoescalar) que proviene de la multiplicación
1
c
i
j k
i j k
c · (a × b) = |c| |a × b| cos(θ)hc,a×bi = c εijk a b = εijk c a b = a1
b1
c2
a2
b2
c3
a3
b3
.
(1.50)
Ejemplo:
in
ar
Mostraremos a continuación dos casos de identidades vectoriales que pueden ser fácilmente demostradas
mediante la utilización de ı́ndices.
1. a × (b × c) = (c · a) b − (a · b) c
El resultado será un vector, por lo tanto
i
(a × (b × c)) = εijk aj (b × c)k
= εijk aj εkmn bm cn = εijk εkmn aj bm cn = εijk εmnk aj bm cn
i j
j i
i j
j i
= δm
δn − δm
δn aj bm cn = δm
δn aj bm cn − δm
δn aj bm cn
re
lim
i m j
j
= δm
b δn aj cn − δni cn δm
aj bm = bi an cn − ci aj bj
| {z }
|{z}
(c·a)
i
(a·b)
i
= b (c · a) − c (a · b) = b (c · a) − c (a · b) .
En la segunda lı́nea hemos hecho uso de la identidad
εjkm εilm = δji δkl − δki δjl = δji δkl − δjl δki .
rP
2. (a × b) · (c × d) = (a · c) (b · d) − (a · d) (b · c)
El lado derecho es un escalar, por lo tanto:
l
(a × b) · (c × d) = (a × b) (c × d)l
ad
o
= εljk aj bk εlmn cm dn = εljk εlmn aj bk cm dn
j k
k j
= εjkl εmnl aj bk cm dn = δm
δn − δm
δn aj bk cm dn
j k
k j
= δm
δn aj bk cm dn − δm
δn aj bk cm dn
j
= δm
aj cm δ k bk dn − δ k bk cm δ j aj dn
| {z }|n {z } |m {z }|n {z }
(a·c)
(b·d)
(b·c)
(a·d)
Bo
rr
= (a · c) (b · d) − (b · c) (a · d) .
1.7.3.
Escalares, pseudoescalares, vectores y pseudovectores
La diferencia entre vectores polares y axiales proviene del siguiente comportamiento bajo transformaciones
de coordenadas y bases. Un vector polar (normal, común y corriente) queda invariante bajo la siguiente
transformación (reflexión)
ei → −ei
=⇒ a = ai ei → −ai (−ei ) = ai ei = a .
i
i
a → −a
28
1.7. ÁLGEBRA VECTORIAL CON ÍNDICES
Mientras que un pseudovector o vector axial cambia de signo cuando las componentes de los vectores y sus
vectores base que lo generan también lo hacen:
ei → −ei
ai → −ai
=⇒ c = a × b → εijk (−aj ) (−bk ) (−ei ) = −ci ei = −c ,
bi → −bi
es decir
a × b = a2 b3 − a3 b2 e1 + a3 b1 − a1 b3 e2 + a1 b2 − ay b1 e3 ,
in
ar
luego de la reflexión:
−a2 −b3 − −a3 −b2 (−e1 ) + −a3 −b1 − −a1 −b3 (−e2 )
+ −a1 −b2 − −a2 −b1 (−e3 )
= − a2 b3 − a3 b2 e1 + a3 b1 − a1 b3 e2 + a1 b2 − a2 b1 e3 = − (a × b) .
a×b=
re
lim
Existen varias e importantes cantidades fı́sicas que vienen representadas por pseudovectores, entre ellas
mencionamos: velocidad angular (v =
de momento angular (L = r × p), torque (τ = r × F),
ω × r), cantidad
∂b
= −∇ × E .
y el campo de inducción magnética
∂t
Adicionalmente el volumen, V = c · (a × b), como era de esperarse, no es invariante bajo el cambio del
espacio
ci → −ci
ai → −ai
=⇒ V = c · (a × b) = ci εijk aj bk → (−ci ) εijk (−aj ) (−bk ) = −V ,
bi → −bi
rP
el volumen es un pseudoescalar.
Mientras que los escalares si son invariantes bajo esta transformación
ai → −ai
=⇒ ζ = a · b = ai bi → −ai (−bi ) = ζ .
i
i
b → −b
ad
o
En general también tendremos multiplicación entre algunos de estos objetos, con lo cual construiremos
otros objetos.
Bo
rr
Rotación de coordenadas: Ya que hablamos de invariancia de cantidades, existe otro tipo de transformación de coordenadas diferente a las reflexiones y que se denomina: rotación de coordenadas.
Consideremos un sistema de coordenadas cartesiano (x, y, z) y su base canónica {i, j, k}. Si rotamos el
sistema de coordenadas un ángulo φ alrededor del eje z tendremos un nuevo sistema de coordenadas (x̂, ŷ, ẑ)
y una nueva base {î, ĵ, k̂}. La regla de transformación que relaciona ambos sistemas de coordenadas es
x = x̂ cos(φ) − ŷ sen(φ)
x̂ = x cos(φ) + y sen(φ)
y = x̂ sen(φ) + ŷ cos(φ)
ŷ = −x sen(φ) + y cos(φ)
⇐⇒
(1.51)
z = ẑ
ẑ = z
Mientras que las bases transformarán, como
î =
ĵ =
k̂ =
veremos más adelante, como:
i cos(φ) + j sen(φ)
−i sen(φ) + j cos(φ)
k
(1.52)
29
1.7. ÁLGEBRA VECTORIAL CON ÍNDICES
Diremos que una tripleta de números a1 , a2 , a3 definen las componente de un vector a = a1 i + a2 j + a3 k
si estas cantidades transforman bajo la rotación predicha de la siguiente manera:
in
ar
â1 = a1 cos(φ) + a2 sen(φ) , â2 = −a1 sen(φ) + a2 cos(φ) , â3 = a3
(1.53)
Si a1 , a2 , a3 no transforman de esta manera, se dice que no son covariantes y no representan las componentes de un vector.
Notemos también lo siguiente, al usar la notación de ı́ndices podemos escribir las ecuaciones de transformación de coordenadas ası́
x̂1 = α11 x1 + α21 x2 + α31 x3
x̂ = x cos(φ) + y sen(φ)
ŷ = −x sen(φ) + y cos(φ)
x̂2 = α12 x1 + α22 x2 + α32 x3
⇒
⇒ x̂i = α̂ji xj , i, j = 1, 2, 3 .
3
3 1
3 2
3 3
ẑ = z
x̂ = α1 x + α2 x + α3 x
Se puede ver fácilmente que las cantidades α̂ji , en coordenadas cartesianas, vienen dadas por
α̂ji =
∂ x̂i
.
∂xj
(1.54)
xj = αij x̂i ,
re
lim
Como la transformación de coordenadas es invertible, se tiene que
con:
αij =
∂xj
.
∂ x̂i
(1.55)
Y cumplen con la siguiente condición de ortogonalidad:
α̂ki αij = δkj .
(1.56)
Y por lo tanto, las componentes de un vector transformarán de la manera siguiente:
1.7.4.
(1.57)
rP
âi = α̂ji aj .
Ejercicios
1. Verifique las siguientes identidades
a) a × (b × c) + b × (c × a) + c × (a × b) = 0.
ad
o
b) (a × b) × (c × d) = b[a · (c × d)] − a[b · (c × d)].
c) (a × b) · (c × d) + (b × c) · (a × d) + (c × a) · (b × d) = 0.
d ) a · (b × a) = 0.
Bo
rr
e) (a × b) · (a × b) = A2 B 2 − (a × b)2 .
a·c a·d f ) (a × b) · (c × d) = b·c b·d 2. Demuestre la siguiente tabla de relaciones
vector
·
vector
·
pseudovector ·
vector
×
vector
×
pseudovector ×
vector
pseudovector
pseudovector
vector
pseudovector
pseudovector
=
escalar
= pseudoescalar
=
escalar
= pseudovector
=
vector
= pseudovector
30
re
lim
in
ar
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Figura 1.6: Vectores variables
3. Demuestre que
rP
α̂ki αij = δkj ,
y además que, como un caso especial, establecer la relación con los cosenos directores que satisfacen
cos(α)2 + cos(β)2 + cos(γ)2 = 1 .
ad
o
4. Demuestre si las siguientes componentes son componentes de un vector.
a)
1.8.
b)
(x, −y)
c)
(x − y, x + y)
d)
(x + y, x − y) .
Un comienzo a la derivación e integración de vectores
Vectores variables
Bo
rr
1.8.1.
(−y, x)
Los vectores podrán ser constantes o variables. Ahora bien, esta caracterı́stica se verificará tanto en las
componentes como en la base. Esto quiere decir que cuando un vector es variable podrán variar su módulo,
su dirección, su sentido, o todo junto o por separado. Obviamente esta variabilidad del vector dependerá de
la base en la cual se exprese, por lo cual un vector podrá tener una componente constante en una base y no
constante en otra, vale decir
0
a (t) = ak (t) ek (t) = Ak ek0 (t) .
(1.58)
Nótese que hemos utilizado una base {ek (t)} de vectores variables a diferencia de la tradicional base de
vectores cartesianos, los cuales son constantes en módulo, dirección y sentido (ver los cuadrantes I y II de
31
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
la figura 1.6). Más aún, tal y como se muestra en cuadrante II de la figura 1.6, todo vector variable podrá
ser expresado como la suma de uno variable, a (t), más otro constante c
a (t) = a (t) + c .
1.8.2.
(1.59)
Derivación
in
ar
De esta manera, cuando uno piensa en un vector variable a (t) uno rápidamente intenta establecer un
cociente incremental:
a (t + ∆t) − a (t)
da (t)
∆a (t)
lı́m
= lı́m
=
,
(1.60)
∆t→0
∆t→0 ∆t
∆t
dt
el cuadrante IV de la figura 1.6 ilustra gráficamente este cociente incremental.
Como siempre, las propiedades de esta operación derivación serán:
re
lim
d
d
d
[a (t) + b (t)] =
a (t) + b (t) ,
dt
dt
dt
d
d
d
[α (t) a (t)] =
α (t) a (t) + α (t)
a (t) ,
dt
dt
dt
d
d
d
[a (t) · b (t)] =
a (t) · b (t) + a (t) ·
b (t) ,
dt
dt
dt
d
d
d
[a (t) × b (t)] =
a (t) × b (t) + a (t) ×
b (t) .
dt
dt
dt
Ahora bien, esto implica que
k
⇒
(1.61)
rP
a (t) = a (t) ek (t)
d ak (t) ek (t)
da (t)
dak (t)
dek (t)
=
=
ek (t) + ak (t)
,
dt
dt
dt
dt
ad
o
con lo cual hay que tener cuidado al derivar vectores y cerciorarse de la dependencia funcional de la base y
componentes.
Habrá sistemas de coordenadas (bases de vectores) que serán constantes y otros en los cuales sus vectores
bases cambiarán en su dirección. El primer término de (1.61) representa la variación del módulo, y el segundo
muestra la contribución de los cambios en dirección del vector. Más aún, mostraremos apoyándonos en la
ilustración de el cuadrante III de la figura 1.6 que, independientemente del sistema de coordenada, el cambio
en el módulo apunta en la dirección del vector, mientras que las contribuciones en dirección apuntan en la
dirección perpendicular al vector. Esto es:
Bo
rr
da (t)
d |a (t)|
=
ûk + |a (t)| û⊥ ,
dt
dt
con ûk · û⊥ = 0 .
(1.62)
Es fácil convencernos de la forma del primer término. Siempre podemos representar un vector como su
módulo y un vector unitario en la dirección apropiada. Esto es
a (t) = |a (t)| û(t)
⇒
da (t)
d [|a (t)| û (t)]
d |a (t)|
dû (t)
=
=
û (t) + |a (t)|
.
dt
dt
dt
dt
2
Adicionalmente: |a (t)| = a (t) · a (t), por lo tanto
h
i
2
d |a (t)|
d [a (t) · a (t)]
d |a (t)|
da (t)
≡
= 2 |a (t)|
≡ 2a (t) ·
,
dt
dt
dt
dt
32
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
con lo cual, al despejar de esta última ecuación
d |a (t)|
a (t) da (t)
da (t)
·
≡
= û (t) ·
,
dt
|a (t)|
dt
dt
| {z }
û(t)
para que finalmente
da (t)
d |a (t)|
dû (t)
= û (t) ·
û (t) + |a (t)|
dt
dt
dt
⇒
dû (t)
=0
dt
in
ar
û (t) ·
d |a (t)|
da (t)
û (t) · dt =
dt
û (t) ·
re
lim
Es decir que el cambio en el módulo de un vector se manifiesta en la dirección del mismo vector, tal y
como era intuitivo suponer. Adicionalmente, vemos que el vector siempre será perpendicular a su derivada.
Gráficamente podemos apreciarlo en el cuadrante IV de la figura 1.6, pero también surge analı́ticamente si
derivamos el vector unitario en la dirección de a (t)
2
d
|û
(t)|
d (1)
dû (t)
dû (t)
d [û (t) · û (t)]
≡
=
≡ 0 = û (t) ·
⇒ û (t) ⊥
,
dt
dt
dt
dt
dt
es decir
rP
d [|a (t)| û (t)]
d |a (t)|
dû (t)
d |a (t)|
da (t)
=
=
û (t) + |a (t)|
=
ûk + |a (t)| û⊥ .
dt
dt
dt
dt
dt
Supongamos que ahora definimos un vector
v̂ × ûk = û⊥
v̂ ⊥ ûk
û⊥ × v̂ = ûk
∆θ = ∆θ v̂ con
⇒
v̂ ⊥ û⊥
ûk × û⊥ = v̂
(1.63)
ad
o
donde ∆θ es el ángulo de rotación del vector A (t) (ver cuadrante V de la figura 1.6). Claramente
∆a⊥ = [A (t + ∆t) sen (∆θ)] û⊥ ≈ [A (t + ∆t) ∆θ] û⊥
entonces
Bo
rr
∆a⊥
∆a
∆θ
≡
· a⊥ a⊥ =
× a (t)
∆t
∆t
∆t
⇒
⇒
∆a⊥ = ∆θ × a (t) ,
da (t)
dθ (t)
· û⊥ û⊥ =
v̂ × a (t) = ω × a (t) ,
dt
dt
donde hemos identificado ω = dθ(t)
dt v̂. Podemos ir más allá observando el cuadrante V de la figura 1.6, vemos
que si suponemos que el módulo del vector es constante, entonces
d |a (t)|
da (t)
da (t)
=0 ⇒
= |a (t)| û⊥ ⇒
· û⊥ û⊥ = ω × a (t) .
dt
dt
dt
33
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
1.8.3.
Velocidades y aceleraciones
El radio vector posición de una partı́cula genera los vectores velocidad y aceleración
r = r (t)
⇒
v (t) =
dr (t)
dt
⇒
a (t) =
dv (t)
d2 r (t)
,
=
dt
dt2
ahora bien
con: ûr = cos(θ) i + sen(θ) j .
Si suponemos que la partı́cula describe una trayectoria entonces
r = r (t)
x = x (t)
y = y (t) ; ûr = ûr (t) ;
⇐⇒
θ = θ (t)
z = z (t)
i = const
j = const
k = const
in
ar
r = rûr = xi + yj + zk ,
dûr
dt
=
re
lim
Es muy común denotar a la derivada temporal sobre funciones de una variable con un punto, es decir,
podemos utilizar la siguiente notación
df (t)
,
f˙(t) ≡
dt
con lo cual
d [cos(θ (t))i + sen(θ (t))j]
= θ̇(t)[− sen(θ (t))i + cos(θ (t))j] = θ̇(t)ûθ ,
|
{z
}
dt
ûθ
Ya que
p
p
ûr · ûr = [cos(θ (t)) i + sen(θ (t)) j] · [cos(θ (t)) i + sen(θ (t)) j] = 1
|ûθ | =
p
p
ûθ · ûθ = [− sen(θ (t)) i + cos(θ (t)) j] · [− (sen(θ (t)))i + cos(θ (t))j] = 1 ,
rP
|ûr | =
entonces:
Más aún
ad
o
ûθ · ûr = ûr · ûθ = [− sen(θ (t)) i + cos(θ (t)) j] · [cos(θ (t)) i + sen(θ (t)) j] = 0 .
dûθ
d [−sen(θ (t)) i + cos(θ (t)) j]
=
= −θ̇(t) [cos(θ (t)) i + sen(θ (t)) j] = −θ̇(t)ûr .
dt
dt
Bo
rr
Para una partı́cula que sigue un movimiento arbitrario, su trayectoria vendrá descrita, en coordenadas
cartesianas, por:
r = x (t) i + y (t) j + z (t) k .
Su velocidad será
v (t) =
dr (t)
d [x (t) i + y (t) j + z (t) k]
=
= ẋ(t)i + ẏ(t)j + ż(t)k = vx (t) i + vy (t) j + vz (t) k .
dt
dt
Y su aceleración
a (t) = v̇x (t)i + v̇y (t)j + v̇z (t)k = ax (t) i + ay (t) j + az (t) k .
34
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Mientras que en coordenadas polares las ecuaciones son:
r (t) = r (t) ûr (t)
⇒
v (t) =
d [r (t) ûr (t)]
dûr (t)
= ṙ(t)ûr (t) + r (t)
,
dt
dt
Velocidad:
v (t) = vr (t) ûr (t) + r (t) θ̇(t)ûθ (t) ,
Aceleración:
dv (t)
=
dt
= r̈(t)ûr (t) + ṙ(t)
d [vr (t) ûr (t)]
+
dt
dt
dûr (t)
dûθ (t)
+ ṙ(t)θ̇(t)ûθ (t) + r (t) θ̈(t)ûθ (t) + r (t) θ̇(t)
dt
dt
r̈(t) − r (t) θ̇(t)
2 n
o
ûr (t) + 2 ṙ(t)θ̇(t) + r (t) θ̈(t) ûθ (t) .
re
lim
=
=
dt
h
i
d r (t) θ̇(t)ûθ (t)
in
ar
a (t) =
h
i
d vr (t) ûr (t) + r (t) θ̇(t)ûθ (t)
rP
Claramente para el caso de un movimiento circular
r (t) = R ûr (t)
dR
v (t) = R θ̇(t)ûθ
=0 ⇒
r = R = const ⇒
dt
a (t) = −R θ̇(t)2 ûr (t) + R θ̈(t)ûθ (t)
i
ad
o
De aquı́ podemos ver claramente que el vector velocidad v (t) y el vector posición r (t) son ortogonales. La
velocidad, v (t) , siempre es tangente a la trayectoria r (t) y en este caso la trayectoria es una circunferencia.
En general el vector
Z
X
X
X
∆ r (ti ) = dr (t) = r (t) ,
rmed =
∆ r (ti ) =
(r (ti + ∆ti ) − r (ti )) ⇒
lı́m
i
es decir dr (t) = lı́m∆t→0
P
i
∆t→0
i
∆ r (ti ) es tangente a la trayectoria. Es claro que
dr (t) = d [x (t) i + y (t) j + z (t) k] ≡
dx (t)
dy (t)
dz (t)
i+
j+
k.
dt
dt
dt
Bo
rr
Tal y como mencionamos arriba, para el sistema de coordenadas cartesiano podemos definir un vector
(en este caso) velocidad angular ω tal que:
ω
× ûr = ûv
|ω|
ω
= ûr
ûv ×
⇒ v (t) = ω × r (t) .
|ω|
ω
ûr × ûv =
|ω|
35
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Supongamos por simplicidad que elegimos el sistema de coordenadas cartesiano, donde r está en el plano
xy. En este caso es inmediato comprobar que v i = εijk ωj xk , y dado que r y v tienen únicamente componentes
1 y 2 entonces, necesariamente ω tiene únicamente componente 3, Es decir
1
r = ri ei
v = ε1j2 ωj x2
⇒
⇒ ω = |ω| e3 = ωk ,
2
v = v i ei
v = ε2j1 ωj x1
como
r = x (t) i + y (t) j ,
entonces
dr (t)
= vx (t) i + vy (t) j = ω × r (t) = θ̇(t)k × [x (t) i + y (t) j] ,
dt
se verá más claro en coordenadas polares, esto es
v (t) =
in
ar
v (t) =
dr (t)
=r (t) θ̇(t)ûθ (t) = [|ω| ûn (t)] × [r (t) ûr (t)] ,
|r (t)| = const
dt
=r (t) θ̇(t)ûθ (t) = |ω| r (t) ûθ (t) ⇒ θ̇(t) ≡ |ω| .
| {z }
1.8.4.
Vectores y funciones
re
lim
v⊥
Antes de continuar con la integración repensemos algunas funciones de tipo φ xi y V xi . Estas funciones son sin duda funciones de varias variables, en el caso cartesiano:
φ = φ (x, y, z) ,
V = V (x, y, z) = iVx (x, y, z) + jVy (x, y, z) + kVz (x, y, z) .
rP
Un par de reflexiones se pueden hacer en este punto, primeramente, dado que hemos relacionado un punto
del espacio con un radio vector posición, entonces
φ = φ (x, y, z) ≡ φ (r)
P(x,y,z) ↔ (x, y, z) ↔ r = x i + y j + z k ⇒
V = V (x, y, z) ≡ V (r)
ad
o
La primera función, φ (r), será una función escalar de argumento vectorial o, simplemente un campo escalar
y la segunda, V (r), se conoce como una función vectorial de argumento vectorial o campo vectorial. Como
hemos dicho, este tipo de funciones y las operaciones que pueden ser realizadas con ellas, y su significado,
serán analizadas en detalle más adelante durante el desarrollo de este curso.
En segundo lugar, siempre podremos parametrizar las coordenadas y tendremos
φ = φ (t) = φ (x (t) , y (t) , z (t)) ,
V = V (t) = V (x (t) , y (t) , z (t)) = Vx (x (t) , y (t) , z (t)) i + Vy (x (t) , y (t) , z (t)) j + Vz (x (t) , y (t) , z (t)) k .
Bo
rr
Este caso lo hemos encontrado en montones de situaciones, por ejemplo, el movimiento parabólico viene
descrito por vectores velocidad y posición dados por:
vx = v0x
vy = v0y
v(t) = −gt k + v0 = −gt k + (v0x i + v0y j + v0z k) ⇒
vz = v0z − gt
g
g
r(t) = − t2 k + v0 t = − t2 k + (v0x i + v0y j + v0z k) t
2
2
⇒
x = v0x t
y = v0y t
z = v0z t − g2 t2
36
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Derivada de funciones del tipo: φ (r (t))
Al derivar una función de argumento vectorial también se aplica la “regla de la cadena”. Esto es, si
φ (r (t)) = φ (x (t) , y (t) , z (t)) ,
entonces:
dφ (r (t))
∂φ (x (t) , y (t) , z (t)) dx (t) ∂φ (x (t) , y (t) , z (t)) dy (t) ∂φ (x (t) , y (t) , z (t)) dz (t)
=
+
+
dt
∂x
dt
∂y
dt
∂z
dt
∂φ (x, y, z)
∂φ (x, y, z) ∂φ (x, y, z)
dx (t)
dy (t)
dz (t)
i+
j+
k ·
i+
j+
k
∂x
∂y
∂z
dt
dt
dt
= ∇φ (x (t) , y (t) , z (t)) ·
in
ar
=
dr (t)
,
dt
∇φ (r (t)) ≡
re
lim
donde hemos representado
∂φ (x, y, z)
∂φ (x, y, z)
∂φ (x, y, z)
i+
j+
k = ∂ i φ xj ii = φ,i xj ii ,
∂x
∂y
∂z
(1.64)
rP
y lo llamaremos el gradiente de la función φ (r (t)).
El gradiente de un campo escalar es uno de los objetos más útiles que encontraremos en el estudio de
problemas de fı́sica-matemática, el cual lo utilizaremos por ahora de manera operacional. Es bueno recordar
que emerge como consecuencia de una derivación contra un parámetro. El gradiente mide el cambio de la
función φ (x, y, z).
La idea de gradiente nos lleva a considerar a ∇ como un operador vectorial que actúa sobre la función
escalar de variable vectorial φ (r (t)).
∂
∂
∂
∇φ (r (t)) ≡
i+
j+ k φ (x, y, z) = ii ∂ i φ (x, y, z) .
(1.65)
∂x
∂y ∂z
ad
o
Es decir, y con un poquito de imaginación
∂
∂
∂
∇ (◦) =
i+
j+
k (◦) = ii ∂ i (◦) .
∂x
∂y
∂z
Derivada de funciones del tipo: V (r (t))
Bo
rr
De modo que inspirados en la regla de la cadena de una función escalar de variable vectorial podemos
comprobar que
dV i xj
dV
dVx (x, y, z)
dVy (x, y, z)
dVz (x, y, z)
=
i+
j+
k=
ii
(1.66)
dt
dt
dt
dt
dt
por consiguiente,
si V,
tiene por componentes cartesianas (Vx , Vy , Vz ) las componentes del vector derivado
serán
dVx dVy dVz
dt , dt , dt
. Con lo cual cada componente
d V i (x (t) , y (t) , z (t))
d V i xj (t)
∂ V i xj dxk (t)
dr (t)
=
=
=
·
∇
V i (x, y, z) ,
dt
dt
∂xk
dt
dt
37
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
en términos vectoriales
dV
=
dt
dr (t)
· ∇ V ≡ (v · ∇) V
dt
d (◦)
= (v · ∇) (◦) ≡ v i ∂i (◦) ,
dt
⇒
con v la derivada del radiovector posición r (t), es decir, la velocidad. Entonces, estamos viendo que el cambio
del vector V respecto al tiempo es el cambio de sus componentes en la dirección de la velocidad.
Si se nos ocurre calcular la derivada del vector velocidad para encontrar la aceleración tendremos que
nos quedará expresada como
dv
= (v · ∇) v
dt
⇒
ai = (v · ∇) v i ,
(1.67)
in
ar
a=
donde las componentes cartesianas de los vectores velocidad y aceleración son: v i = v i (x (t) , y (t) , z (t)) y
ai = ai (x (t) , y (t) , z (t)), respectivamente.
1.8.5.
El operador ∇
re
lim
El operador vectorial ∇ (◦) merece un poco de atención en este nivel. Tal y como hemos visto:
El Gradiante
∂φ (x, y, z)
∂φ (x, y, z)
∂φ (x, y, z)
i+
j+
k,
∂x
∂y
∂z
= ∂ 1 φ (x, y, z) i1 + ∂ 2 φ (x, y, z) i2 + ∂ 3 φ (x, y, z) i3 = ∂ i φ xj ii .
∇φ (x, y, z) =
rP
Pero es posible construir otras combinaciones realizando operaciones igual como con un vector común
y corriente
El Rotor
ad
o
Ası́ en el caso de ∇ × E, que se denomina rotor de E, este viene definido por
∂
∂
∂
∇×E=
i+
j+
k × (Ex i + Ey j + Ez k)
∂x
∂y
∂z
=
Divergencia
∂Ez
∂Ey
−
∂y
∂z
i+
∂Ez
∂Ex
−
∂z
∂x
j+
∂Ex
∂Ey
−
∂x
∂y
k = εijk ∂j Ek ii .
Bo
rr
También podemos hablar del “producto escalar” de nabla por un vector a. A esta operación la llamaremos divergencia de a:
∂ax (x, y, z) ∂ay (x, y, z) ∂az (x, y, z)
∂ai xj
∇·a=
≡ ∂i ai xj ≡
+
+
,
(1.68)
i
∂x
∂x
∂y
∂z
pero por ahora consideremos nabla ∇ como un vector.
De este modo habrá una gran cantidad de relaciones vectoriales que involucran a ∇, las cuales se podrán
demostrar.
38
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Ejemplo:
1. ∇ (a · b) = (a · ∇) b + (b · ∇) a + a × (∇ × b) + b × (∇ × a)
El resultado es un gradiente, es decir un vector. El lado izquierdo será
i
(∇ (a · b)) = ∂ i (a · b) = ∂ i aj bj = ∂ i aj bj + ∂ i bj aj
mientras que el lado derecho
~ × b + εijk bj (∇ × a)
bj ∂ j ai + εijk aj ∇
k
k
i
j
ijk
m n
ijk
m n
bj ∂ a + ε aj εkmn ∂ b + ε bj εkmn ∂ a
bj ∂ j ai + εijk εmnk aj ∂ m bn + εijk εmnk bj ∂ m an
i j
j i
i j
j i
bj ∂ j ai + δm
δn − δm
δn aj ∂ m bn + δm
δn − δm
δn bj ∂ m an
in
ar
i
(∇ (a · b)) = aj ∂ j bi +
= aj ∂ j bi +
= aj ∂ j bi +
= aj ∂ j bi +
i j
j i
i j
j i
= aj ∂ j bi + bj ∂ j ai + δm
δn aj ∂ m bn − δm
δn aj ∂ m bn + δm
δn bj ∂ m an − δm
δn bj ∂ m an
= aj ∂ j bi + bj ∂ j ai + an ∂ i bn − am ∂ m bi + bn ∂ i an − bm ∂ m ai
re
lim
= aj ∂ j bi − am ∂ m bi + bj ∂ j ai − bm ∂ m ai + an ∂ i bn + bn ∂ i an
{z
} |
{z
}
|
=0
=0
= an ∂ i bn + bn ∂ i an = ∂ i aj bj = ∂ i (a · b) .
2. ∇ × (a · ∇) a = (∇ · a) (∇ × a) − [∇ · (∇ × a)] a + (a · ∇) (∇ × a) − [(∇ × a) · ∇] a
Iniciamos la traducción a ı́ndices por el lado izquierdo de la ecuación, ası́
rP
∇ × (a · ∇) a = ijk ∂j (am ∂ m ) ak = ijk (∂j am ) ∂ m ak + ijk am ∂j ∂ m ak
= ijk (∂j am ) ∂ m ak + am ∂ m ijk ∂j ak ,
el lado derecho lo traduciremos término por término
ad
o
(∇ · a) (∇ × a) = (∂ m am ) ijk ∂j ak
− [∇ · (∇ × a)] a = − ∂m mjk ∂j ak ai = − mjk ∂m ∂j ak ai = 0
(a · ∇) (∇ × a) = am ∂ m ijk ∂j ak
− [(∇ × a) · ∇] a = − mjk ∂j ak ∂m ai .
Bo
rr
El segundo término se anula por cuanto mjk es antisimétrico respecto a los ı́ndices m, j mientras que
∂m ∂j es simétrico. El tercer término del desarrollo del lado derecho corresponde con el segundo del
desarrollo del lado izquierdo. Por lo tanto, llegamos a la siguiente igualdad
ijk (∂j am ) ∂ m ak = (∂ m am ) ijk ∂j ak − mjk ∂j ak ∂m ai .
Para verificar la igualdad tendremos que evaluar componente a componente. Esto es, para el lado
izquierdo:
1jk (∂j am ) ∂ m ak = 123 (∂2 am ) ∂ m a3 + 132 (∂3 am ) ∂ m a2
= (∂2 am ) ∂ m a3 − (∂3 am ) ∂ m a2
= (∂2 a1 ) ∂ 1 a3 + (∂2 a2 ) ∂ 2 a3 + (∂2 a3 ) ∂ 3 a3 − (∂3 a1 ) ∂ 1 a2 − (∂3 a2 ) ∂ 2 a2 − (∂3 a3 ) ∂ 3 a2 ,
39
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
mientras que para el primer término del lado derecho
(∂ m am ) 1jk ∂j ak = (∂ m am ) 123 ∂2 a3 + (∂ m am ) 132 ∂3 a2
= ∂2 a3 ∂ 1 a1 + ∂2 a3 ∂ 2 a2 + ∂2 a3 ∂ 3 a3 − ∂3 a2 ∂ 1 a1 − ∂3 a2 ∂ 2 a2 − ∂3 a2 ∂ 3 a3 ,
| {z }
| {z }
α
β
y el segundo término se escribe como
− mjk ∂j ak ∂m ai = − 1jk ∂j ak ∂1 a1 − 2jk ∂j ak ∂2 a1 − 3jk ∂j ak ∂3 a1
= − (∂2 a3 − ∂3 a2 ) ∂1 a1 − (∂3 a1 − ∂1 a3 ) ∂2 a1 − (∂1 a2 − ∂2 a1 ) ∂3 a1
α
β
γ
in
ar
= ∂3 a2 ∂1 a1 − ∂2 a3 ∂1 a1 + ∂1 a3 ∂2 a1 − ∂3 a1 ∂2 a1 + ∂2 a1 ∂3 a1 − ∂1 a2 ∂3 a1 .
| {z } | {z }
| {z } | {z }
γ
Al sumar ambos términos se eliminan los sumandos indicados con letras griegas, y queda como
(∂ m am ) 1jk ∂j ak − mjk ∂j ak ∂m ai = ∂2 a3 ∂2 a2 + ∂2 a3 ∂3 a3
Ξ
Υ
−∂3 a2 ∂2 a2 −∂2 a2 ∂3 a3 + ∂1 a3 ∂2 a1 −∂1 a2 ∂3 a1 ,
Ψ
Λ
Σ
re
lim
Ω
y al compararlo con el desarrollo del lado derecho e identificar término a término queda demostrada la
igualdad
1jk (∂j am ) ∂ m ak = (∂2 a1 ) ∂1 a3 + (∂2 a2 ) ∂2 a3 + (∂2 a3 ) ∂3 a3
Λ
Ξ
Υ
− (∂3 a1 ) ∂1 a2 − (∂3 a2 ) ∂2 a2 − (∂3 a3 ) ∂3 a2 .
Σ
1.8.6.
Integración
Ψ
rP
De igual manera se procede con i = 2 e i = 3.
Ω
ad
o
Después de haber diferenciado campos escalares y vectoriales, el siguiente paso es integrarlos. Encontraremos algunos objetos vectoriales a integrar y serán:
Integración de un vector por un escalar
Z
V (u) du
Bo
rr
Integración de un escalar a lo largo de un vector
Z
φ (x, y, z) dr
(1.69)
(1.70)
c
Integración de un vector a lo largo de otro vector
Z
V (x, y, z) · dr
(1.71)
c
El primero de los casos es el tipo de integral que siempre hemos utilizado para encontrar la posición a
partir de la velocidad. Los siguientes tres casos se conocen con el nombre de integrales de lı́nea por cuanto
es importante la “ruta” o trayectoria que sigamos al integrar. Esto aparece indicado por la letra C en la
integral y será evidente más adelante. En general la integral de lı́nea dependerá de la trayectoria.
40
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Un vector por un escalar:
R
V (u) du
El primer caso de este tipo integrales es el trivial que ya sabemos calcular:
Z
Z
Z
Z
Z
i
V (u) du ii .
V (u) du = i Vx (u) du + j Vy (u) du + k Vz (u) du =
(1.72)
in
ar
La integral de un vector (en un sistema de coordenadas cartesianas) por un escalar se convierte en la suma
de tres integrales, cada una a lo largo de las componentes cartesianas del vector.
Ası́ integramos la aceleración de un movimiento parabólico
Z
Z
dv
= a = −g k ⇒ v = a dt = k
−g dt = −k gt + v0 = −k gt + iv0x + jv0y + kv0z
dt
Ahora bien, existen sutilezas en este caso que debemos tener en cuenta. Por ejemplo, considere la integral
Z
Z
Z
d2 a
d
da
da da
d
da
da
dt a × 2 = dt
a×
−
= dt
a×
=a×
×
+ c.
dt
dt
dt
dt
dt
dt
dt
dt
re
lim
Pero en general los casos quedan resueltos integrando componente a componente con la ayuda de la
notación de ı́ndices
Z
Z
dt (a × b) =
dt εijk aj bk ii .
Ejemplo:
Tal vez, uno de los problemas que ilustra mejor esta situación es el movimiento bajo fuerzas centrales.
La Ley de Gravitación de Newton nos dice que para un sistema de dos masas, m y M se tiene:
F=ma
⇒
mG
dv
M
ûr = m
2
rmM
dt
⇒
rP
X
dv
GM
= 2 ûr .
dt
rmM
Nótese que:
d
dt
ad
o
Es costumbre definir la velocidad aerolar, va , como el área barrida por el radio vector posición, r (t) que
describe la trayectoria de la partı́cula
dr
d (r ûr )
dr
dûr
dûr
dûr
2va = r ×
= r ûr ×
= rûr ×
ûr + r
= r ûr × r
= r2 ûr ×
.
dt
dt
dt
dt
dt
dt
dûr
ûr ×
=0
dt
⇒
ûr ×
dûr
=c
dt
⇒
2va = r2 ûr ×
dûr
= const ,
dt
Bo
rr
donde c es un vector constante, con lo cual
GM
d
dv
GM
(v × va ) =
× va = 2 ûr × va =
dt
dt
rmM
2
d
GM
(v × va ) =
dt
2
dûr
ûr × ûr ×
dt
dûr
dûr
GM dûr
ûr ·
ûr − (ûr · ûr )
=
,
dt
dt
2 dt
integrando
v × va =
GM
ûr + p
2
41
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
donde p es un vector arbitrario que aparece como constante de integración. Finalmente nos damos cuenta
que
GM
GM
r · (v × va ) = r ûr ·
ûr + p =
r + rp cos(θ)
2
2
= εijk ri vj vak ≡ va · (r × v) = va · va = va2
y entonces
GM
=
r + rp cos(θ)
2
⇒
r=
va2
≡
+ p cos(θ)
1+
GM
2
que constituye la ecuación de una curva cónica ¿Cuál curva?
Un escalar a lo largo de un vector:
R
C
φ (r) dr
2
2va
GM
2p
GM cos(θ)
in
ar
va2
C
re
lim
El segundo objeto que “tropezaremos” es la integración de funciones de varias variables a lo largo de una
curva determinada. Esto es
Z
Z
Z
Z
Z
φ (x, y, z) dr =
φ xi (dxi + dyj + dzk) = i
φ xi dx + j
φ xi dy + k
φ xi dz . (1.73)
C
C
C
C
Ejemplo:
φ (x, y) = 3x2 + 2y
Z
⇒
rP
La integral se nos ha convertido en tres integrales, las cuales son ahora componentes de un vector. Esto
es posible dado que la base (i, j, k) es una base constante. Ahora bien, cada una de estas integrales son
interdependientes, dado que hay que seguir la misma curva C. Consideremos el caso bidimensional que es
más simple y contiene toda la riqueza conceptual del tridimensional.
(1,2)
3x2 + 2y dr = i
3x2 + 2y dx + j
(0,0)
ad
o
(0,0)
(1,2)
Z
Z
(1,2)
3x2 + 2y dy
(0,0)
Se requiere especificar la curva C a lo largo de la cual integraremos desde el punto P1 → (0, 0) al punto
P2 → (1, 2).
Si recorremos la ruta C1 : (0, 0) → (1, 0) → (1, 2) podemos hacerlo de la manera más sencilla:
(1,0)
Z
⇒
y = cte = 0
Bo
rr
(0, 0) → (1, 0)
(1, 0) → (1, 2)
⇒
x = cte = 1
⇒
(0,0)
Z
3x2 + 2y dr = j
(0,0)
Z
C1 ←→ (0, 0) → (1, 0) → (1, 2)
−−−−−→
−−−−−→
C1B
Z
1
Z
3x2 dx = i
0
(1,2)
3x2 + 2y dy = j
(0,0)
con lo cual
C1A
3x2 + 2y dx = i
(0,0)
(1,0)
⇒
(1,0)
Z
3x2 + 2y dr = i
Z
2
(3 + 2y) dy = 10j
0
(1,2)
⇒
3x2 + 2y dr = i + 10j
(0,0)
42
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
Si hubiéramos seleccionado la recta que une a estos dos puntos como la curva C2 entonces
C2 :
⇒
y = 2x
dy = 2dx ,
entonces
Z
(1,2)
3x2 + 2y dr = i
Z
(1,2)
3x2 + 2y dx + j
(0,0)
1
(0,0)
Z
=i
(1,2)
Z
3x2 + 2y dy
(0,0)
1
3x2 + 2 (2x) dx + j
Z
3x2 + 2 (2x) 2dx = 3i + 6j
0
0
C : {x = x (τ ) , y = y (τ ) , z = z (τ )}
in
ar
En general la curva C se puede parametrizar y las integrales en varias variables se convertirán en integrales
a lo largo del parámetro que caracteriza la curva
re
lim
Por lo tanto:
Z
Z
∂x (τ )
∂y (τ )
∂z (τ )
φ (x, y, z) dr =
φ (x (τ ) , y (τ ) , z (τ ))
dτ i +
dτ j +
dτ k
∂τ
∂τ
∂τ
C
C
Z
Z
∂x (τ )
∂y (τ )
=i
φ (x (τ ) , y (τ ) , z (τ ))
dτ + j
φ (x (τ ) , y (τ ) , z (τ ))
dτ
∂τ
∂τ
C
C
Z
∂z (τ )
+k
φ (x (τ ) , y (τ ) , z (τ ))
dτ .
∂τ
C
rP
Las parametrizaciones para las curvas anteriores son muy simples
x=τ
x=2
x=τ
C1A =
; C1B =
; C2 =
y=0
y=τ
y = 2τ
Un vector a lo largo de otro vector:
R
C
F (r) · dr
C
ad
o
R
Quizá la integral de lı́nea más conocida sea una del tipo C F (r) · dr por cuanto nos la hemos “tropezado”
en el cálculo del trabajo que realiza una fuerza. Todo lo que hemos considerado al parametrizar la curva en
el caso anterior, sigue siendo válido.
Z
Z
Z
Z
Z
F (r) · dr =
Fx (x, y, z) dx +
Fy (x, y, z) dy +
Fz (x, y, z) dz =
F i xj dxi
(1.74)
C
Bo
rr
Ejemplo:
Si consideramos
C
C
C
F (r) = 3x2 + 2xy 3 i + 6xy j ,
entonces
Z (1, 43 √2)
Z (1, 34 √2)
F (r) · dr =
(0,0)
3x2 + 2xy 3 i + 6xy j (dx i + dy j)
(0,0)
Z (1, 34 √2)
=
2
3x + 2xy
(0,0)
3
Z (1, 43 √2)
dx +
6xy dy ,
(0,0)
43
1.8. UN COMIENZO A LA DERIVACIÓN E INTEGRACIÓN DE VECTORES
y si la curva que une esos puntos viene parametrizada por: x = 2τ 2 , y = τ 3 + τ
∂y(τ )
2
∂τ = 3τ + 1, entonces la primera de las integrales resulta
Z (1, 43 √2)
⇒
∂x(τ )
∂τ
= 4τ ,
√
2
3x + 2xy
3
2
2
Z
dx =
(0,0)
3 2τ 2
2
+ 2 2τ 2
τ3 + τ
3 (4τ ) dτ
0
√
=
0
Y la segunda
9305 √
16 τ 12 + 48 τ 10 + 48 τ 8 + 16 τ 6 + 48 τ 5 dτ = 1 +
2.
24024
Z (1, 43 √2)
Z
√
2
2
6xy dy =
(0,0)
6 2τ 2
τ3 + τ
0
65
,
3τ 2 + 1 dτ =
32
con lo cual
Z (1, 43 √2)
Z (1, 34 √2)
F (r) · dr =
1.8.7.
3x + 2xy
3
Z (1, 43 √2)
6xy dy =
dx +
(0,0)
(0,0)
Ejercicios
1. Demuestre que
db
[a · (b × c)] = da
dt · (b × c) + a · dt × c + a · b ×
h i
d
d2 a
d3 a
b) dt
a · da
= a · da
dt × dt2
dt × dt3
a)
d
dt
dc
dt
rP
c) ∇ × (∇ × A) = ∇∇ · A − ∇ · ∇A
d ) ∇ × (φ∇φ) = 0
97
9305 √
2.
+
32 24024
re
lim
(0,0)
2
in
ar
2
2
Z
e) ∇ × [A × (∇ × A)] = 0, si A = (y, z)i.
2. Para los vectores dados a continuación, encuentre dr/ds
ad
o
a) r = ti + 3t2 j − (t − 1)k, y t = ln(1 + s2 )
b) r = sen(t)i + cos(t)j + tan(t)k, y t = 2 + s2
3. Una partı́cula describe un movimiento dado por el vector posición r. Encuentre la componente de su
velocidad en la dirección del vector indicado
Bo
rr
a) r = t2 i + 4 cos(2t)j + 3sen(2t)k,
2
2i + j + 2k.
b) r = 3 cos(t)i + 3sen(t)j + (t − 2)k,
i + 2j − k
4. Si u, v y w son funciones que dependen del parámetro t, demuestre que
du
d
dv
[u · (v × w)] = u · v × dw
a) dt
dt + u · dt × w + dt · (v × w)
du
d
dv
b) dt
[u × (v × w)] = u × v × dw
dt + u × dt × w + dt × (v × w)
5. Si u = 2ti − t2 j + k, v = 2i + 3tj + tk y w = ti + 2tj − tk. Utilice el resultado del ejercicio anterior (a)
d
para encontrar dt
[u · (v × w)].
44
1.9. VECTORES Y NÚMEROS COMPLEJOS
6. Si u = ti − tj + t2 k, v = −ti + 2tj − t2 k y w = 2ti − 2tj + tk. Utilice el resultado del ejercicio anterior
d
(b) para encontrar dt
[u × (v × w)].
7. Encuentre el gradiente de los siguientes campos
a) φ(x, y, z) = x2 + 3xyz − yz 2
−1
b) φ(x, y, z) = x2 + 2y 2 + 4z 2
8. Encuentre la divergencia de los siguientes campos
a) V(x, y, z) = x2 yi + y 2 z 2 j + xz 3 k
in
ar
b) V(x, y, z) = (1 − x2 )i + sen(yz)j + exyz k
9. Encuentre el rotor de los siguientes campos
a) V(x, y, z) = xyz 2 i + x2 yzj + xy 2 k
10. Evalúe las siguientes integrales
R
a)
tsen(t)i + 2t2 j − 7tk dt
R
b)
cosh2 (t)i + 2sen2 (2t)j − k dt
re
lim
b) V(x, y, z) = senh(xy)i + cosh(yz)j + xyzk
11. Un campo de fuerza actúa sobre un oscilador descrito por: F = −kxi − kyj. Compare el trabajo hecho
al moverse en contra de este campo al ir desde el punto (1, 1) al punto (4, 4) siguiendo los siguientes
caminos:
(1, 1) → (4, 1) → (4, 4)
b)
(1, 1) → (1, 4) → (4, 4)
c)
(1, 1) → (4, 4)
siguiendo el camino x = y
rP
a)
y
12. Dado el campo de fuerza: F = − x2 +y
2i +
x
x2 +y 2 j
Calcule el trabajo hecho en contra de este campo de fuerza al moverse al rededor de un circulo de radio
uno y en el plano x − y
ad
o
a) desde 0 a π en sentido contrario a la agujas del reloj.
b) desde 0 a −π en sentido de las agujas del reloj.
13. Evaluar la siguiente integral
I
Bo
rr
r · dr .
1.9.
Vectores y números complejos
Desde los primeros cursos de matemática nos hemos tropezado con las llamadas raı́ces imaginarias o
complejas de polinomios. De este modo la solución a un polinomio cúbico
x = 2i
x = −2i
x3 − 3x2 + 4x − 12 = 0 ⇒
⇒ (x + 2i) (x − 2i) (x − 3) = 0
(1.75)
x=3
45
1.9. VECTORES Y NÚMEROS COMPLEJOS
o cuadrático
x = 2i
x +4=0 ⇒
⇒ (x + 2i) (x − 2i)
(1.76)
x = −2i
√
nos lleva a definir un número i2 = −1 ⇒ i = −1. Como vimos arriba al multiplicar el número imaginario i por cualquier número real obtendremos el número imaginario puro ib, con b ∈ R. La nomenclatura
de números imaginarios surgió de la idea de que estas cantidades no representaban mediciones fı́sicas. Esa
idea ha sido abandonada pero el nombre quedó.
2
1.9.1.
Los números complejos y su álgebra
in
ar
Un número complejo, z, es la generalización de los números imaginarios (puros), ib. Esto es
a → parte real
z = a + ib
con a, b ∈ R ⇒
b → parte imaginaria
(1.77)
re
lim
Obviamente los números reales serán a + i0 números complejos con su parte imaginaria nula. Los números
imaginarios puros serán números complejos con su parte real nula, esto es, 0 + ib. Por ello, en general diremos
que
z = a + ib ⇒ a = Re (z) ∧ b = Im (z) ,
(1.78)
es decir, a corresponde a la parte real de z y b a su parte imaginaria.
Cada número complejo, z tendrá asociado un número complejo conjugado, z ∗ tal que
z = a + ib
z ∗ = a − ib
⇓
∗ ∗
(z ) = z
z · z ∗ = a2 + b2 ,
rP
claramente
∧
z · z∗ ≥ 0
2
2
⇒ |z| = |z ∗ | = z · z ∗ = a2 + b2 .
(1.79)
Es importante señalar que, en general, no existe relación de orden entre los números complejos. Vale
decir, que no sabremos si un número complejo es mayor que otro. No está definida esta operación.
∨
z1 ≮ z2 .
ad
o
z1 ≯ z2
(1.80)
Las relaciones de orden sólo se podrán establecer entre módulos de números complejos y no números complejos
en general.
Rápidamente recordamos el álgebra de los números complejos:
Bo
rr
Dos números complejos serán iguales si sus partes reales e imaginarios lo son
z1 = z2
⇒
(a1 + ib1 ) = (a2 + ib2 )
⇒
∧
a1 = a2
b1 = b2 .
(1.81)
Se suman dos números complejos sumando sus partes reales y sus partes imaginarias.
z3 = z1 + z2
⇒
(a1 + ib1 ) + (a2 + ib2 ) = (a1 + a2 ) + i(b1 + b2 ) = a3 + ib3 ,
| {z }
| {z }
a3
(1.82)
b3
claramente z + z ∗ = 2 Re z, también z − z ∗ = 2 Im z. Igualmente es inmediato comprobar que
∗
(z1 + z2 ) = z1∗ + z2∗ .
(1.83)
46
1.9. VECTORES Y NÚMEROS COMPLEJOS
Se multiplican números complejos por escalares multiplicando el escalar por sus partes reales e imaginarias
z3 = αz1 ⇒ α (a1 + ib1 ) = (αa1 ) + i (αb1 ) .
(1.84)
Se multiplican números complejos entre si, multiplicando los dos binomios y teniendo cuidado que
i2 = −1.
z3 = z1 z2 ⇒ (a1 + ib1 ) · (a2 + ib2 ) = (a1 a2 − b1 b2 ) + i (a1 b2 + b1 a2 ) ,
(1.85)
∗
también es inmediato comprobar que (z1 z2 ) = z1∗ z2∗ .
1.9.2.
in
ar
Se dividen números complejos siguiendo la estrategia de racionalización de fracciones irracionales. Esto
es
b1 a2 − a1 b2
z1
(a1 + ib1 )
(a1 + ib1 ) (a2 − ib2 )
a1 a2 + b1 b2
+i
,
(1.86)
z3 =
⇒
=
=
2
2
z2
(a2 + ib2 )
(a2 + ib2 ) (a2 − ib2 )
(a2 + b2 )
(a22 + b22 )
es claro que el divisor será cualquier número complejo excepto el cero complejo: 0 + i0.
Vectores y el plano complejo
z = (a + ib)
re
lim
Mirando con cuidado el álgebra de números complejos nos damos cuenta que un número complejo puede
ser representado por una dupla de números, es decir,
z = (a, b)
Las propiedades entre números complejos de igualdad, suma y multiplicación por un escalar arriba expuestas se cumplen de forma inmediata con esta nueva representación. Hay que definir las operaciones de
multiplicación y división entre números complejos de forma que
a1 a2 + b1 b2 b1 a2 − a1 b2
(a1 , b1 )
=
,
(a1 , b1 ) (a2 , b2 ) = (a1 a2 − b1 b2 , a1 b2 + b1 a2 ) ∧
(a2 , b2 )
(a22 + b22 )
(a22 + b22 )
Bo
rr
ad
o
rP
Esta asociación de un número complejo con una pareja de números inmediatamente nos lleva a imaginar
un punto en un plano (complejo) en el cual la primera componente (horizontal) representa la parte real
y la segunda componente (vertical) representa la parte imaginaria. De esta forma asociamos a un número
complejo a un vector que une a ese punto (a, b) con el origen del plano complejo. Esta representación de
números complejos como vectores en el plano (complejo) se conoce con el nombre de Diagrama de Argand4 a
pesar que no fue Jean Argand, sino Caspar Wessel5 el primero en proponerlo. Por cierto, esta interpretación
fue tres veces redescubierta, primero por Caspar Wessel en 1799, luego por Jean Argand en 1806 y finalmente
por Gauss6 en 1831.
De esta manera, como un recordatorio al plano real
p
√
∗
2
2
r = zz = |z| = x + y
z = x + iy z = r (cos(θ) + i sen(θ)) con
tan(θ) = y donde − π ≤ θ ≤ π
x
4 En honor a JEAN ROBERT ARGAND (Ginebra, Suiza, 18 Julio 1768; Parı́s, Francia 13 agosto 1822). Contador pero
matemático aficionado, propuso esta interpretación de números complejos como vectors en un plano complejo en un libro
autoeditado con sus reflexiones que se perdió y fue rescatado 7 años después, fecha a partir de la cual Argand comenzó a
publicar en Matematicas.
5 CASPAR WESSEL (Vestby, Noruega 8 junio 1745; 25 marzo 1818, Copenhagen, Dinamarca) Matemático noruego que
se dedicó principalemente al levantamiento topográfico de Noruega. Su trabajo sobre la interpretación de números complejos
permaneció desconocido por casi 100 años.
6 JOHANN CARL FRIEDRICH GAUSS (30 abril 1777, Brunswick, Alemania; 23 febrero 1855, Göttingen, Alemania). Uno
de los mátemáticos más geniales y precoces de la Historia. Desde los 7 años comenzó a mostrar sus condiciones de genialidad.
Sus contribuciones en Astronomı́a y Matemáticas son múltiples y diversas.
47
1.9. VECTORES Y NÚMEROS COMPLEJOS
La interpretación vectorial de números complejos permite que la suma de números complejos sea representada
por la “regla del paralelogramo”. Mientras que los productos escalar y vectorial nos llevan a
z1 · z2 = Re (z1 z2∗ ) = Re (z1∗ z2 )
∧
z1 × z2 = Im (z1∗ z2 ) = −Im (z1 z2∗ )
Con esta interpretación tendremos
x = Re z
y =√
Im z
r = zz ∗ = |z|
θ
Fórmulas de Euler y De Moivre
in
ar
1.9.3.
componente real del vector z o parte real de z
componente imaginaria del vector z o parte imaginaria de z
módulo, magnitud o valor absoluto de z
ángulo polar o de fase del número complejo z
re
lim
En cursos anteriores, nos hemos tropezado con la expansión en Taylor7 de funciones, esta serie permite
expresar cualquier función infinitamente diferenciable alrededor de un punto x0 como una serie infinita de
potencias del argumento de la función, esto es:
1 d2 f (x) 1 d3 f (x) df (x) 2
3
(x
−
x
)
+
(x
−
x
)
+
(x − x0 ) + · · · · · ·
f (x) = 1 +
0
0
dx x=x0
2 dx2 x=x0
3! dx3 x=x0
1 dn f (x) n
f (x) = Cn (x − x0 ) ,
con Cn =
y donde n = 0, 1, 2, 3, . . .
n! d xn x=x0
Si consideramos x0 = 0, podremos ver a continuación algunos desarrollos en series de funciones elementales
1
1
1
1 5
1 6
1 7
ex = 1 + x + x2 + x3 + x4 +
x +
x +
x + ······
2
6
24
120
720
5040
rP
1
1
1 6
cos(x) = 1 − x2 + x4 −
x + ······
2
24
720
ad
o
1
1 5
1 7
sen(x) = x − x3 +
x −
x + ······
6
120
5040
Es fácil convencerse que para la serie de ex se tiene
1
1
1
1 5
1 6
1
eiθ = 1 + iθ − θ2 + − i θ3 + θ4 +
iθ −
θ + −
i θ7 + · · · · · ·
2
6
24
120
720
5040
Bo
rr
y que puede rearreglarse como
1
1 6
1
1 5
1 7
1
θ + · · · · · · + i θ − θ3 +
θ −
θ + ······
eiθ = 1 − θ2 + θ4 −
2
24
720
6
120
5040
|
{z
}
|
{z
}
cos(θ)
sen(θ)
eiθ = cos(θ) + i sen(θ) ,
7 BROOK TAYLOR (18 agosto 1685, Edmonton, Inglaterra; 29 diciembre 1731, Londres, Inglaterra) Fı́sico y Matemático
inglés contemporaneo de Newton y Leibniz y junto con ellos participó profundamente en el desarrollo del Cálculo diferencial e
integral. Además de sus aportes al estudio del magnetismo, capilaridad y termometrı́a, desarrolló el área de diferencias finitas
que hasta hoy utilizamos para cálculos en computación. Inventó la integración por partes y descubrió la serie que lleva su
nombre.
48
1.9. VECTORES Y NÚMEROS COMPLEJOS
esta relación se conoce como la relación de Euler8 . Con lo cual ahora tenemos tres formas de representar un
número complejo
z = x + iy z = r (cos(θ) + i sen(θ)) z = reiθ .
La expresión z = x + iy se conoce como forma cartesiana de representación de un número complejo,
la forma z = r (cos(θ) + i sen(θ)) será la forma trigonométrica o polar y la expresión z = eiθ será la forma de Euler. Es importante notar una sutileza implı́cita en esta notación. La forma cartesiana representa
unı́vocamente a un número complejo, mientras que la forma polar (y la de Euler), es ambigua
z = r (cos(θ) + i sen(θ)) = r (cos(θ + 2nπ) + i sen(θ + 2nπ)) ,
(1.87)
π
i = ei 2 ,
−1 = eiπ ,
π
−i = e−i 2 ,
1 = ei2kπ
in
ar
es decir, existen varios valores del argumento que definen el mismo número complejo. Esto se considerará
más adelante cuando tratemos las funciones de número complejos.
La fórmula de Euler, para cuando −π < θ < π resulta en los siguientes simpáticos resultados
con k = 0, ±1, ±2, ±3 . . .
(1.88)
Más aún, si
z = x + iy
⇒
re
lim
Las sumas de números complejos son más fácilmente planteables en su forma cartesiana. Mientras las
multiplicación y división serán directas en la forma de Euler
z1 = r1 eiθ1
⇒ z1 z2 = eiθ1 eiθ2 = ei(θ1 +θ2 ) = r1 r2 (cos (θ1 + θ2 ) + i sen (θ1 + θ2 )) .
iθ2
z2 = r2 e
ez = e(x+iy) = ex eiy = ex (cos(y) + i sen(y)) ,
1.9.4.
rP
a partir de la relación o fórmula de Euler se puede demostrar la De Moivre9
n
n
eiθ = einθ = (cos(θ) + i sen(θ)) = cos (nθ) + i sen (nθ) , con n entero.
Algunas aplicaciones inmediatas
Presentaremos algunas aplicaciones inmeditas la fórmula de De Moivre en diferentes ámbitos.
ad
o
Identidades trigonométricas
La primera de las aplicaciones de la fórmula de De Moivre es para construir identidades trigonométricas
en las cuales se expresa el coseno, o el seno, de factores de un ángulo. Veamos las siguientes (nada triviales)
identidades trigonométricas
cos(3θ) = 4 cos3 (θ) − 3 cos(θ)
sen(3θ) = 3 sen(θ) − 4sen3 (θ) ,
o
(1.89)
Bo
rr
para demostrar estas (y otras) identidades utilizamos la fórmula de De Moivre, es decir
cos(3θ) + i sen( 3θ) = (cos(θ) + i sen(θ))
3
= cos3 (θ) − 3 cos(θ) sen2 (θ) + i 3 cos2 (θ) sen(θ) − sen3 (θ) ,
8 LEONHARD EULER (15 abril 1707, Basilea, Suiza; 18 septiembre 1783, San Petersburgo, Rusia). Uno de los matemáticos
más prolı́ficos de todos los tiempos. Desarrolló inmensamente campos como la geometrı́a analı́tica y trigonometrı́a, siendo el
primero que consideró el coseno y el seno como funciones. Hizo aportes significativos en el desarrollo del cálculo diferencial e
integral ası́ como también, astronomı́a, elasticidad y mecánica de medios contı́nuos.
9 ABRAHAM DE MOIVRE (26 mayo 1667 in Vitry-le-François, Francia; 27 noviembre 1754, Londres Inglaterra) Matemático
francés que tuvo que emigrar a Inglaterra por razones religiosas. Contemporaneo de Newton, Liebniz y Halley, fue pionero con
sus contribuciones en geometrı́a analı́tica y teorı́a de probabilides.
49
1.9. VECTORES Y NÚMEROS COMPLEJOS
igualando ahora parte real e imaginaria tendremos
cos(3θ) = cos3 (θ) − 3 cos(θ) sen2 (θ)
= cos3 (θ) − 3 cos(θ) 1 − cos2 (θ) = 4 cos3 (θ) − 3 cos(θ)
sen(3θ) = 3 cos2 (θ) sen(θ) − sen3 (θ)
= 3 1 − sen2 (θ) sen(θ) − sen3 (θ) = 3 sen(θ) − 4sen3 (θ) .
z = eiθ = cos(θ) + i sen(θ)
⇒
in
ar
El método puede extenderse a expresiones de senos y cosenos de nθ.
Igualmente podemos desarrollar un método para encontrar expresiones de potencias de funciones trigon
nométricas en término de funciones de factores de ángulo del tipo (cos(θ)) = F (cos(nθ), sen(nθ)). Para
empezar, supongamos que tenemos un número complejo de módulo 1, de tal forma que
1
n
z + z n = 2 cos(nθ)
(1.90)
Estas identidades surgen de manera inmediata de
zn +
re
lim
z n − 1 = 2i sen(nθ)
zn
1
n
−n
= (cos(θ) + i sen(θ)) + (cos(θ) + i sen(θ)) = (cos(nθ) + i sen(nθ)) + (cos (−nθ) + i sen (−nθ))
zn
= cos(nθ) + i sen(nθ) + cos(nθ) − i sen(nθ) = 2 cos(nθ) ,
z+
rP
igualmente puede demostrarse la segunda de las afirmaciones anteriores.
Ahora bien, supongamos además que n = 1, con lo cual se cumple que
1
= eiθ + e−iθ = 2 cos(θ)
z
y
z−
1
= eiθ − e−iθ = 2i sen(θ) ,
z
(1.91)
1
cos(θ) =
2
es decir
ad
o
que también lo sabı́amos desde la más temprana edad de nuestros cursos de bachillerato.
Ahora bien, lo que quizá no sabı́amos en ese entonces (y quizá ahora tampoco) es que a partir de aquı́
podemos construir, por ejemplo:
1
z+
z
⇒
1
cos (θ) = 5
2
5
5
1
1
1
5
10
5
3
z+
= 5
z + 5 + 5z + 3 + 10z +
,
z
2
z
z
z
1
[2 cos(5θ) + 10 cos(3θ) + 20 cos(θ)] ,
25
de la misma manera se puede proceder con otras potencias y con potencias de la función seno.
Bo
rr
cos5 (θ) =
Raı́ces de polinomios
La fórmula de De Moivre nos puede ayudar para encontrar raı́ces de polinomios. Supongamos, para
empezar, que queremos encontrar las n raı́ces de la ecuación z n = 1. Para ello procedemos con el siguiente
artificio
z n = 1 = cos (2πk) + i sen (2πk) = ei(2πk) , donde k = 0, 1, 2, ....
(1.92)
50
1.9. VECTORES Y NÚMEROS COMPLEJOS
con lo cual las n raı́ces de la ecuación z n = 1 serán
zn = 1
z
z 0 = 1;
z1 = e2πi( n ) ;
1
z2 = e2πi( n ) ;
2
⇒
z = e i(
2πk
n
⇓
}|
3
z3 = e2πi( n ) ; · · ·
)
zn−2 = e2πi(
n−2
n
);
zn−1 = e2πi(
n−1
n
{
)
in
ar
es decir, n raı́ces corresponderán a los n valores de k = 0, 1, 2, · · · n − 2, n − 1. Mayores valore de k no proveen
nuevas raı́ces.
2π
4π
2πk
Las raı́ces de la ecuación z 3 = 1 serán entonces: z = ei( 3 ) ⇒ z0 = 1, z1 = ei( 3 ) , z2 = ei( 3 ) .
Estas propiedades pueden extenderse a raı́ces de polinomios con más términos.
Ejemplo:
Supongamos la siguiente ecuación polinómica con sus raı́ces:
5
4
z − z + 2z − 2 = 0
4
⇒
z + 2 (z − 1) = 0
⇒
4
z +2=0
Entonces, del resultado anterior
z 4 = −2(1) = −2 ei(2πk)
z−1=0
⇒
z 4 = −2
z=1
re
lim
⇒
h i1/4
2πk
2πk
23/4
(1 + i) ei( 4 )
z = −2 ei(2πk)
= (−2)1/4 ei( 4 ) =
2
√
π 1/2
π
donde hemos utilizado el hecho de que: (−1)1/4 = i1/2 = ei 2
= ei 4 = 22 (1 + i) . Por lo tanto:
⇒
π
i
1
1
(1 + i) ,
z1 = 1/4 (1 + i) ei( 2 ) = 1/4 (1 + i)
21/4
2
2
3π
i
1
1
1
z2 =
(1 + i) ei(π) = − 1/4 (1 + i) , z3 = 1/4 (1 + i) ei( 2 ) = − 1/4 (1 + i) .
21/4
2
2
2
La ecuación z 5 − z 4 + 2z − 2 = 0, tendrá las siguientes cinco raı́ces:
z0 =
=
1
(1 + i) ,
21/4
z1 = −
rP
z0
1
(1 − i) ,
21/4
z2 = −
1
(1 + i) ,
21/4
z3 =
1
(1 − i) ,
21/4
z4 = 1 .
ai z i = 0 ,
ad
o
Una afirmación que nos han dicho, y que quizá no sepamos de dónde viene, es que si un polinomio
con coeficientes reales tiene raı́ces complejas, ellas serán complejas conjugadas unas de otras. Vale decir, si
z 5 − z 4 + 2z − 2 = 0 tiene como raı́z (1 + i), también tendrá como raı́z (1 − i), como hemos visto.
Esta afirmación se prueba de forma general si suponemos que tenemos la siguiente ecuación
con i = 0, 1, 2, · · · n − 1, n
⇒
a0 + a1 z + a2 z 2 · · · + an−1 z n−1 + an z n = 0 ,
(1.93)
Bo
rr
donde los coeficientes a0 , a1 , a2 , · · · , an−1 , an los suponemos reales, esto es: ai = a∗i para todos los valores
del ı́ndice i.
Al tomar el complejo conjugado nos queda:
a0 + a1 z + a2 z 2 · · · + an−1 z n−1 + an z n = 0
⇐⇒
2
n−1
2
n−1
a∗0 + a∗1 z ∗ + a∗2 (z ∗ ) · · · + a∗n−1 (z ∗ )
n
+ a∗n (z ∗ ) = 0 ,
(1.94)
como los coeficientes son reales tenemos que
⇐⇒
a0 + a1 z ∗ + a2 (z ∗ ) · · · + an−1 (z ∗ )
n
+ an (z ∗ ) = 0 ,
(1.95)
esto nos dice que si z es solución también lo será z ∗ ya que la ecuación es la misma por tener los mismos
coeficientes (reales).
a0 + a1 z + a2 z 2 · · · + an−1 z n−1 + an z n = 0
51
1.9. VECTORES Y NÚMEROS COMPLEJOS
Ejemplo:
Ahora consideremos el siguiente polinomio complejo
P (z) = z 6 − z 5 + 4z 4 − 6z 3 + 2z 2 − 8z + 8 = 0 .
Si por algún método comprobamos que (z 3 − 2) es uno de sus factores, entonces podremos encontrar las
raı́ces del polinomio P (z). Veamos, claramente si (z 3 − 2) es un factor podemos expresar
P (z) = z 6 − z 5 + 4z 4 − 6z 3 + 2z 2 − 8z + 8 = (z 3 − 2)(z 3 − z 2 + 4z − 4) = (z 3 − 2)(z − 1)(z 2 + 4) ,
z3 = 2 ,
Para z 2 = −4
Para z 3 = 2
⇒
⇒
z = 1,
z 2 = −4
z = ±2i .
z 3 = 2 ei(2πk)
1/3
2πk
z = 2 ei(2πk)
= 21/3 ei( 3 )
⇒
Por lo tanto:
z1 = 21/3 ei(
) = −2
2π
3
1/3
2
h
1−
√ i
3i ,
z2 = 21/3 ei(
4π
3
1/3
) = −2
re
lim
z0 = 21/3 ,
in
ar
con lo cual, como z es complejo, hay que tener cuidado con las raı́ces encubiertas. Entonces, la raı́ces son:
2
h
√ i
1 + 3i .
La ecuación z 6 − z 5 + 4z 4 − 6z 3 + 2z 2 − 8z + 8 = 0, tendrá las siguientes seis raı́ces:
√
√ i
1 h
3
3 i , z = 1 , z = ±2i .
z = 2, z = −√
1
±
3
4
Definamos la siguiente función
rP
Logaritmos y potencias de números complejos
z = eiθ
⇐⇒
Ln(z) = iθ ,
(1.96)
donde Ln representa el logaritmo natural del número complejo z. Nótese que hemos utilizado Ln en lugar
de tradicional ln y la razón es la ambigüedad implı́cita en la notación de Euler, vale decir
⇐⇒
Ln(z) = ln(r) + i (θ + 2nπ) = ln(r) + iθ ,
ad
o
z = reiθ
(1.97)
en otras palabras, Ln(z) no es función por el hecho de ser multivaluada. Se supera esta dificultad cuando se
restringe el argumento −π < θ ≤ π y esta se conoce como el valor principal de la función
Ejemplo:
Bo
rr
i
π
h
π
Ln (−3i) = Ln 3ei(− 2 +2nπ) = ln(3) + i − + 2nπ
con n = 0, 1, 2, · · ·
2
decimos que el valor principal del Ln (−3i) será ln(3) − i π2 .
Con la misma intuición se procede con las potencias de números complejos. Si queremos evaluar z = i−5i
tendremos que proceder como sigue
h π
i
π
+ 2nπ ,
z = i−5i ⇒ Ln (z) = Ln i−5i = −5i Ln (i) = −5i Ln ei( 2 +2nπ) = 5
2
con lo cual z = i−5i ¡es un número real!
h√
3 i
Para finalizar consideremos otro par de casos de potencias y logaritmos: ii y Ln
3+i
.
52
1.9. VECTORES Y NÚMEROS COMPLEJOS
h π
ii
2 π
π
ii = ei( 2 +2nπ) = ei ( 2 +2nπ) = e−( 2 +2nπ) ,
Ln
1.9.5.
h √
3+i
3 i
i
h
i arctan √13
= 3 Ln 2e
= 3 ln(2) + i arctan √13 + 2nπ = ln(8) + i
π
2
+ 6nπ .
Ejercicios
z1∗ z2 = z1 · z2 + ik · (z1 × z2 )
2. Demuestre que
a) cos(3α) = cos3 (α) − 3 cos(α)sen2 (α)
3. Demuestre que
a) cos4 (α) =
1
8
(3 + 4 cos(2α) + cos(4α))
b) cos3 (α) + sen3 (α) =
1
4
cos(3α) + 3 cos(α) − sen3 (α) + 3sen(α)
4. Demuestre que
ix − 1
ix + 1
2i
b)
= e(−2y cot
1−
√
3i
c)
(−1)1/3
d)
−1
(x))
81/6
e)
√
(−8 − 8 3i)1/4
Bo
rr
ad
o
a)
iy
rP
donde x y y son números reales.
5. Encuentre las raı́ces de
re
lim
b) sen(3α) = 3 cos2 (α)sen(α) − sen3 (α)
in
ar
1. Si los números complejos z1 = x1 + iy1 y z2 = x2 + iy2 se pueden representar como vectores en el plano
z1 = x1 i + y1 j y z2 = x2 i + y2 j, muestre que
53
1.10. ALGUNOS EJEMPLOS RESUELTOS
1.10.
Algunos ejemplos resueltos
1. Hemos definido como la posición, R, del centro de masa para un sistema de N partı́culas como
R=
ΣN
i=1 mi ri
ΣN
j=1 mj
donde ri corresponde con la posición de la i−ésima partı́cula.
Determine la posición del centro de masa para un sistema de tres masas, mi = 1,2,3, colocadas en los
vértices de un triángulo equilátero de lado l = 2.
in
ar
Solución: Al colocar el origen de coordenadas en uno de los vértices y uno de los ejes de coordenadas
sobre uno de los lados, entonces
√ √
1 · 2i + 3 · i + 3j
Σ3i=1 mi ri
m1 r1 + m1 r1
3
5
R= 3
=
=
= i+
j
Σj=1 mj
MT
6
6
2
a = 3i + 2j + k ,
re
lim
2. Dada una base ortonormal {i, j, k} y los siguientes vectores
b = 3i − 2j + k ,
c=i−k
rP
a) Comprobar si {a, b, c} forman una base.
Solución: Para que los vectores formen una base tienen que ser linealmente independientes. Esto
es αa + βb + γc = 0 ⇒ α = β = γ = 0, con lo cual
3α + 3β + γ = 0
2α − 2β = 0
α (3i + 2j + k) + β (3i − 2j + k) + γ (i − k) = 0 ⇒
α+β−γ =0
ad
o
y al resolver el sistema se obtiene: α = β = γ = 0 con lo cual se demuestra que son linealmente
independientes.
Otra manera de resolverlo es mostrar que: c · (a × b) 6= 0 y efectivamente
1 0 −1 1 = 4 6= 0 .
c · (a × b) = 3 2
3 −2 1 Bo
rr
b) Si {a, b, c} forman una base, exprese d = i + 2j , e = 3i − 2j y f = a × b en término de esa base
{a, b, c}. De lo contrario, construya una base como {a, b, a × b} y exprese los vectores {d, e, f }
en término de esa nueva base.
Solución: Como forman base expresamos los vectores en esos términos. Esto es
3α + 3β + γ = 1
2α − 2β = 2
i + 2j = α (3i + 2j + k) + β (3i − 2j + k) + γ (i − k) ⇒
α+β−γ =0
resolviendo tendremos que d = 85 a − 38 b + 41 c. Seguidamente
3α + 3β + γ = 3
2α − 2β = −2
3i − 2j = α (3i + 2j + k) + β (3i − 2j + k) + γ (i − k) ⇒
α+β−γ =0
54
1.10. ALGUNOS EJEMPLOS RESUELTOS
resolviendo tendremos que e = − 18 a + 78 b + 43 c
Ahora bien
i
f = a × b ≡ (3i + 2j + k) × (3i − 2j + k) ≡ 3
3
j
2
−2
k
1
1
= 4i − 12k
con lo cual
in
ar
3α + 3β + γ = 4
2α − 2β = 0
4i − 12k = α (3i + 2j + k) + β (3i − 2j + k) + γ (i − k) ⇒
α + β − γ = −12
y finalmente f = a × b = −a − b + 10c .
3. Utilizando la notación de ı́ndices demostrar que para cualquier trı́o de vectores {a, b, c} se cumple que
a × (b × c) + b × (c × a) + c × (a × b) = 0.
Solución: En notación de ı́ndices
re
lim
a × (b × c) + b × (c × a) + c × (a × b) = lmi am ijk bj ck + lmi bm ijk cj ak + lmi cm ijk aj bk
con lo cual, arreglando
lmi ijk am bj ck + lmi ijk bm cj ak + lmi ijk cm aj bk =
δjl δkm − δjm δkl am bj ck + δjl δkm − δjm δkl bm cj ak + δjl δkm − δjm δkl cm aj bk
y ahora desarrollando los productos de las δ’s, e indentificando término a término, notamos que se
anula
I
II
rP
ak bl ck −ak bk cl + bk cl ak −bk ck al + ck al bk −ck ak bl = 0 .
| {z } | {z }
| {z } | {z }
| {z } | {z }
II
III
III
I
4. Una partı́cula se mueve a lo largo de una curva descrita por
ad
o
x(t) = 3t2
y(t) = 4t3 − t
z(t) = t
a) Encuentre las expresiones para los vectores: posición, velocidad y aceleración de esa partı́cula.
Solución:
r(t) = 3t2 i + (4t3 − t)j + tk ,
v = 6ti + (12t2 − 1)j + k ,
a = 6i + 24tj .
Bo
rr
b) Encuentre las expresiones, más generales, de los vectores tangentes y perpendiculares a todo punto
de la trayectoria de la partı́cula.
Solución: Vector tangente a todo punto de la trayectoria es el vector velocidad
v = 6ti + (12t2 − 1)j + k ,
El perpendicular a todo punto, será un vector b = bx i + by j + bz k, tal que
(6ti + (12t2 − 1)j + k) · (bx i + by j + bz k) = 6tbx + (12t2 − 1)by + bz = 0 ,
con lo cual
b = bx i + by j − (6tbx + (12t2 − 1)by )k .
55
1.10. ALGUNOS EJEMPLOS RESUELTOS
5. El campo de fuerzas del oscilador anarmónico anisótropo bidimensional se escribe como
F = −k1 x2 i + k2 yj .
Encuentre el trabajo realizado,
R (x2 ,y2 )
(x1 ,y1 )
(1.98)
dr · F a lo largo de las siguientes trayectorias
a) (1, 1) → (4, 1) → (4, 4)
Solución:
Z
Z (4,1)
(idx) · (−k1 x2 i + k2 j) +
(4,4)
(jdy) · (−k1 16i + k2 yj) = −21k1 +
b) (1, 1) → (1, 4) → (4, 4)
Solución:
Z (1,4)
Z
(jdy) · (−k1 i + k2 yj) +
(1,1)
in
ar
(4,1)
(1,1)
(4,4)
(idx) · (−k1 x2 i + k2 4j) = −21k1 +
(1,4)
re
lim
c) (1, 1) → (4, 4) para x = y
Solución:
Z (4,4)
Z
(idx + jdx) · (−k1 x2 i + k2 xj) =
(1,1)
15k2
2
15k2
2
(4,4)
(−k1 x2 + k2 x)dx = −21k1 +
(1,1)
15k2
2
6. Dados los siguientes puntos en el espacio (1, 0, 3); (2, −1, 0); (0, −1, 1); (−1, 0, 1).
rP
a) Considere los tres primeros puntos. ¿Estos tres puntos son coplanares? ¿por qué? Explique.
Solución: Tres puntos en el espacio definen un plano, por lo tanto siempre serán coplanares.
y
ad
o
b) Encuentre el área del triángulo que tiene por vértices esos tres puntos.
Solución: Para ello seleccionamos uno de los puntos como un vértice privilegiado (digamos
(2, −1, 0)) respecto al cual construirémos dos vectores que representan dos de los lados del triángulo. Esto es
a = (1, 0, 3) − (2, −1, 0) ↔ a = −i + j + 3k ,
b = (0, −1, 1) − (2, −1, 0) ↔ b = −2i + k ,
Bo
rr
con lo cual, el área del vértice será la
dos vectores. Es decir
i
1
A = |a × b| ⇒ a × b = −1
2
−2
mitad del área del paralelogramo que tiene por lados estos
j
1
0
k
3
1
√
= i − 5j + 2k ⇒ A = 1 |i − 5j + 2k| = 30 .
2
2
c) Encuentre la ecuación del plano que los contiene
Solución: La ecuación del plano vendrá dada por
(r − r1 ) · ((r2 − r1 ) × (r3 − r1 )) = 0 ,
donde
r = xi + yj + zk,
r1 = i + 3k,
r2 = 2i − j,
r3 = −j + k,
56
1.10. ALGUNOS EJEMPLOS RESUELTOS
con lo cual la ecuación del plano queda como
(x − 1) y (z − 3) 1
−1
−3 = 0 ⇒ −(x − 1) + 5y − 2(z − 3) = 0 ⇒ x − 5y + 2z = 7 .
−1
−1
−2 in
ar
d ) Considere los cuatro puntos ¿Estos cuatro puntos son coplanares? ¿por qué? De NO ser coplanares,
encuentre la distancia del cuarto punto al posible plano que contiene a los otros tres.
Solución: Para verificar si el cuarto punto está en el plano, verificamos si cumple la ecuación que
lo define
(−1) − 5(0) + 2(1) 6= 7 ,
los cuatro puntos no son coplanares. Para calcular la distancia del cuarto punto al plano se
construye el vector unitario normal al plano
n̂P =
a×b
1
= √ (i − 5j + 2k) ,
|a × b|
30
1
d = n̂P · c = √ (i − 5j + 2k) · (−3i + j + k) ,
30
re
lim
con lo cual la distancia al cuarto punto será
1
6
d = n̂P · c = √ (i − 5j + 2k) · (−3i + j + k) = − √ .
30
30
7. Considere los siguientes tres vectores
w1 = i + 3k ,
w2 = 2i − 3j ,
w3 = −j + k .
rP
a) ¿Forman una base para R3 ? Explique detalladamente
Solución: Son linealmente independientes, estos es
αw1 + βw2 + γw3 = 0 ⇒ α = β = γ = 0 ,
ad
o
que se comprueba directamente al resolver
α
3α
+2β
−3β
−γ
+γ
=0
=0
=0
Bo
rr
b) Si es que forman base, exprese el vector a = i − 3j + 3k en la posible base {w1 , w2 , w3 }
Solución: Como son linealmente independientes, forman base, con lo cual cualquier vector puede
ser expresado como combinación lineal de estos tres. Eso es:
1
α= 3
=1
α +2β
−3β −γ = −3
β = 13
a = αw1 + βw2 + γw3 ⇒
⇒
3α
+γ = 3
γ=2
8. Utilizando la notación de ı́ndices muestre si se cumple la siguiente identidad
∇ × (a × b) = a (∇ · b) − b (∇ · a) + (b · ∇) a − (a · ∇) b.
57
1.10. ALGUNOS EJEMPLOS RESUELTOS
Solución:
j
i j
∇ × (a × b) = ijk ∂j (klm al bm ) = (δli δm
− δm
δl )∂j (al bm ) = ∂m (ai bm ) − ∂l (al bi ) ,
expandiendo la derivada
∇ × (a × b) = bm ∂m (ai ) + ai ∂m (bm ) − bi ∂l (al ) − al ∂l (bi ) ≡ (b · ∇)a + (∇ · b)a − (∇ · a)b − (a · ∇)b .
9. La trayectoria de un punto en el plano vista por un observador 1 es
in
ar
r1 (t) = 5 cos(3t2 ) i + 5 sen(3t2 ) j .
a) Exprese las aceleraciones radiales y tangenciales de esta partı́cula.
Solución: Es claro que la partı́cula describe un movimiento circular donde θ(t) = 3t2
r(t) = 5ûr ⇒ v(t) =
dθ(t)
da(t)
dr(t)
=5
ûθ = 30t ûθ ⇒ a(t) =
= 30 ûθ − 30t ûr .
dt
dt
dt
re
lim
b) Considere ahora un segundo observador, el cual describe una trayectoria respecto al primero
representada por
r21 (t) = (t3 − 4t)i + (t2 + 4t) j .
Encuentre las expresiones para los vectores posición, velocidad y aceleración de la partı́cula medidos respecto al segundo observador.
Solución: La trayectoria de la partı́cula respecto al segundo observador será
con lo cual
rP
r2 (t) = r1 (t) − r21 (t) = 5 cos(3t2 ) i + 5 sen(3t2 ) j − ((t3 − 4t)i + (t2 + 4t) j) ,
r2 (t) = 5 cos(3t2 ) − t3 + 4t i + 5 sen(3t2 ) − t2 − 4t j ,
entonces
y
dv2 (t)
= −6 30 cos 3t2 t2 + 5sen 3t2 + t i − 2 90sen 3t2 t2 − 15 cos 3t2 + 1 j .
dt
Bo
rr
a2 (t) =
dr2 (t)
= − 30 sen 3 t2 t + 3 t2 − 4 i + 30 cos 3 t2 t − 2 t − 4 j ,
dt
ad
o
v2 (t) =
58
1.11. EJERCICIOS PROPUESTOS
1.11.
Ejercicios propuestos
1. Utilizando un programa de manipulación simbólica (ver Apéndice 2.1) realice las siguientes tareas.
A = i1 + 2i2 + 3i3 ,
B = 4i1 + 5i2 + 6i3 ,
in
ar
a) Calcule la función f (z) = ez a partir de su expansión en serie que la define. Calcule también f (z)
inπ
cuando z = e 6 para n = 0, 1, 2, . . . , 12. Para los diferentes valores de n haga una tabla con los
z
z
z
valores de: θ = nπ
6 , Re (z), Im (z), Re (e ), Im (e ), |z| y la fase de e .
b) Calcule y haga una tabla para los valores de (x; y) = (0, 0; 0, 0)(0, 1; 0, 1)(0, 5; 0, 5)(1, 0; 1, 0) de:
Re (senh(z)), Im (senh(z)), |senh(z)| y la fase de senh(z).
c) Calcule y haga una tabla para los valores de (x; y) = (0, 0; 0, 0)(0, 1; 0, 1)(0, 5; 0, 5)(1, 0; 1, 0) de:
Re (cosh(z)), Im (cosh(z)), | cosh(z)| y la fase de cosh(z).
d ) Dados los siguientes vectores
C = 3i1 + 2i2 + i3 ,
D = 6i1 + 5i2 + 4i3
re
lim
Encuentre:
1) A + B + C + D , A + B − C − D , A − B + C − D , −A + B − C + D
2) El ángulo entre los vectores A, B, C, D y los vectores base i1 , i2 , i3 .
3) La magnitud de los vectores A, B, C, D.
4) El ángulo entre A y B y entre C y D.
5) La proyección de A sobre B.
6) ¿Son los vectores A, B, C, D coplanares?
7) Encuentre (A + B) · (C + D)
8) Los productos A × B, B × C, C × D y los ángulos que estos forman con D.
9) C · (A × B).
ad
o
rP
2. Auguste Bravais10 se dio cuenta que replicando un arreglo geométrico muy simple, se puede describir
una estructura cristalina. Dicho de otro modo, que conociendo una celda simple, podemos conocer la
estructura cristalina. Esto es que las posiciones de los átomos en una red cristalina puede ser descrita por
un vector R = a + b + c = n1 a1 + n2 a2 + n3 a3 = ni ai donde los ai son vectores no coplanares (vectores
primitivos o, simplemente en nuestro lenguaje, vectores base). Los ni son números enteros (negativos,
cero o positivos). La posición de cada átomo de un cristal puede ser descrita como reescalamientos
(discretos) de este vector genérico o, de manera más precisa, la traslación del origen de coordenadas
por un vector. Ese concepto se conoce como redes de Bravais11 . En cada red puede haber varios vectores
primitivos12 . Se puede definir la celda primitiva como la estructura mı́nima que replicada reproduce
todo el cristal. Vale decir la estructura cristalina es invariante bajo traslaciones espaciales del tipo
R0 = R + T con T = mi ai .
Bo
rr
a) Redes de Bravais bidimensionales. Tal y como muestra la Figura 1.7 existen 5 tipos distintos
de redes de Bravais bidimensionales.
1) Dada la red bidimensional de la Figura 1.8 encuentre todos los posibles vectores primitivos y
celdas primitivas asociadas.
2) La humanidad ha estado seducida por la geometrı́a desde que empezó a representar figuras.
A partir de las cuatro imágenes que se ilustran en la Figura 1.9, encuentre todos los posibles
vectores y celdas primitivas asociadas.
10 http://en.wikipedia.org/wiki/Auguste_Bravais
11 http://en.wikipedia.org/wiki/Bravais_lattice
12 http://www.engr.sjsu.edu/rkwok/Phys175A/Chapter%201.pdf
59
re
lim
in
ar
1.11. EJERCICIOS PROPUESTOS
Figura 1.7: Las 5 redes de Bravais bidimensionales fundamentales: 1 Oblicuas, 2 rectangular, 3 rectangular centrada (rómbica), 4 hexagonal, y 5 cuadrada. Figura tomada de http://en.wikipedia.org/wiki/
Bravais_lattice
rP
3) Maurits Cornelis Escher13 fue un fenomenal dibujante holandés, quien se interesó por las
simetrı́as de los grupos de imágenes de papel tapiz. Berend, hermano de Maurits, era cristalógrafo y le mostró la belleza de las simetrı́as de la naturaleza. En las cuatro obras del
género de Teselado14 de M.C. Escher, presentadas en la Fig 1.10 encuentre todos los posibles
vectores y celdas primitivas asociadas.
ad
o
b) Redes de Bravais Tridimensionales. Este tipo de redes complica un poco mas el escenario.
Se puede demostrar que existen 14 de estas redes, tal y como se muestran en la Figura 1.11
Bo
rr
Muestre que los volúmenes de ocupación atómica, para los sistemas Monoclı́nico, Triclı́nico,
Ortorómbico, Tetragonal, Romboédrico, exagonal y cúbico, corresponden a las expresiones
que se muestran en la Figura 1.11.
El sistema cúbico, el más simple, corresponde a un sistema con un único parámetro de red
a = |a|, ya que a = b = c. Además, una posible descripción, para el caso más simple, es
a = i; b = j; c = k, los tres vectores cartesianos ortogonales. Existen otros sistemas que
también están asociados al cúbico. Estos son el sistema cúbico cara centrada (fcc por sus
siglas en inglés) y cúbico cuerpo centrado (bcc). En el primero existen átomos en el centro de
cada una de las caras del cubo definido por la trı́ada, a = b = c. En el sistema fcc se añade
un átomo la centro del cubo simple.
1) Muestre que un sistema bcc también puede ser descrito por los vectores primitivos: a = ai,
b = aj y c = a(i + j + k)/2. Dibuje la celda primitiva y calcule su volumen.
13 http://en.wikipedia.org/wiki/M._C._Escher
14 http://en.wikipedia.org/wiki/Tessellation
60
Figura 1.8: Red cristalina bidimensional.
in
ar
1.11. EJERCICIOS PROPUESTOS
b×c
;
a · (b × c)
b0 =
c×a
;
a · (b × c)
rP
a0 =
re
lim
2) Muestre que un sistema bcc también puede ser descrito por los vectores primitivos: a =
a(j + k − i)/2, b = a(k + i − j)/2 y c = a(i + j − k)/2. Dibuje la celda primitiva y calcule
su volumen.
3) Muestre que un sistema fcc también puede ser descrito por los vectores primitivos: a =
a(j + k)/2, b = a(i + k)/2 y c = a(i + j)/2. Otra vez, dibuje la celda primitiva y calcule
su volumen.
Se puede definir la red recı́proca como
y
c0 =
a×b
;
a · (b × c)
ad
o
De esta manera es claro que, por construcción, a0 · b = a0 · c = 0 y además a0 · a = 1. Con
0
0
lo cual podemos generalizarlo como êi · êj = δji . Exprese los vectores y las celdas recı́procas
para los sistemas cúbico simple, y los distintos bcc y fcc. Calcule además el volúmen de cada
celda recı́proca.
3. Considerando que
r = x i + y j + z k = xm im ,
A = A(r) = A(x, y, z) = Ai (x, y, z)ii y B = B(r) = B(x, y, z) = B i (x, y, z)ii
y ψ = ψ(r) = ψ(x, y, z)
Bo
rr
φ = φ(r) = φ(x, y, z)
usando la notación de ı́ndices e inspirándose en las secciones 1.7.2, 1.8.5 y 1.10, muestre las siguientes
identidades vectoriales
a) ∇(φψ) = φ∇ψ + ψ∇φ
b) ∇ · (φA) = φ∇ · A + (∇φ) · A
c) ∇ × ∇φ = 0, también ∇ · (∇ × A) y ¿qué puede decir de ∇ × (∇ · A)?
d ) ∇ · (A × B) = (∇ × A) · B + A × (∇ × B)
e) ∇ × (∇ × A) = ∇(∇ · A) − ∇2 A
61
re
lim
in
ar
1.11. EJERCICIOS PROPUESTOS
Figura 1.9: Cuatro detalles geométricos. Cuadrante I: Mural egipcio. Cuadrante II: Mural Mural Asirio.
Cuadrante III: Tejido Tahitı́. Cuadrante IV: Ilustración en pieza de porcelana china. Tomado de http:
//en.wikipedia.org/wiki/Wallpaper_group
4. Una partı́cula se mueve bajo la ley r(t) = x(t)i + y(t)j + z(t)k con
y(t) = t2 − 4t;
z(t) = 3t − 5.
rP
x(t) = 2t2 ;
El parámetro t representa el tiempo. Encuentre las expresiones para la aceleración y la velocidad de la
partı́cula, para t = 1 y en la dirección del vector i − 3j + 2k.
ad
o
5. Suponga ahora el caso general de una partı́cula que se mueve en una curva descrita por r(t) = x(t)i +
y(t)j + z(t)k. Muestre que el vector velocidad es tangente a la trayectoria descrita
6. Encuentre la ecuación vectorial para una trayectoria recta que pasa por los puntos P → (1, 2, 3) y
Q → (1, 1, 1)
7. Encuentre el ángulo entre los siguientes planos x + y + z = 9 y x + y − z = 3.
Bo
rr
8. Un fluido se considera irrotacional si su campo de velocidades v = v(r) = v(x, y, z) cumple con la
ecuación ∇ × v = 0. Suponga, ahora que v = (x + 2y + az)i + (bx − 3y − z)j + (4x + cy + 2z)k.
a) Encuentre el valor de a, b y c para que este campo de velocidades sea irrotacional
b) Es intuitivo convencerse que si ∇ × v = 0 ⇒ v = ∇ψ. Encuentre expresión para la función
potencial ψ = ψ(r) = ψ(x, y, z)
R
c) Considere la siguiente integral I = C dr · v. Donde C es el circuito a recorrer.
1) Calcule el valor de la integral I a lo largo del trayecto: (0, 0, 0) → (1, 1, 0) mediante una segmento de recta. Luego, de (1, 1, 0) → (2, 0, 0) a lo largo de otro segmento de recta. Finalmente
regresando (2, 0, 0) → (0, 0, 0) también siguiendo una recta.
62
re
lim
in
ar
1.11. EJERCICIOS PROPUESTOS
Figura 1.10: Teselados de M.C. Escher, tomados de http://www.wikipaintings.org/en/
paintings-by-genre/tessellation?firstArtist=m-c-escher#artist-m-c-escher
rP
2) Calcule el valor de la integral I de (0, 0, 0) → (2, 0, 0) a lo largo de un arco de circunferencia
que cumple con la ecuación (x−1)2 +y 2 = 1. Ahora regresando de (2, 0, 0) → (0, 0, 0) también
a través de una recta.
3) ¿Qué puede concluir del campo v?
9. Dos funciones complejas Z1 (t) y Z2 (t) cumplen con las siguientes ecuaciones
ad
o
dZ1∗
−i
==
dt
Z1 − Z2
−i
dZ2∗
==
dt
Z2 − Z1
y
Muestre que las siguientes cantidades son constantes.
Bo
rr
Z1 + Z2
|Z1 − Z2 |
|Z1 |2 + |Z2 |2
10. Considere la siguiente ecuación
z 7 − 4z 6 + 6z 5 − 6z 4 + 6z 3 − 12z 2 + 8z + 4 = 0
Encuentre sus raı́ces sabiendo que z 3 = 2.
11. Muestre que la expansión binomial puede ser escrita como
(1 + x)n =
n
X
m=0
Am (n) xm
con Am (n) =
n!
m!(n − m)!
63
rP
re
lim
in
ar
1.11. EJERCICIOS PROPUESTOS
ad
o
Figura 1.11: Las 14 Redes de Bravais Tridimensionales y las estructuras cristalinas asociadas. Tomado de
http://en.wikipedia.org/wiki/Bravais_lattice
Bo
rr
Si está convencido de la expansión anterior, considere ahora una parecida: 1 + eiθ
n
X
n
n
X
n
n
y muestre que
θ
nθ
Am (n) cos(nθ) = 2 cos
cos
2
2
m=0
n
y
θ
nθ
Am (n) sen(nθ) = 2 cos
sen
2
2
m=0
n
12. Las funciones hiperbólicas se definen como
cosh(x) =
ex + e−x
2
y
senh(x) =
ex − e−x
2
64
1.11. EJERCICIOS PROPUESTOS
y de manera análoga a las funciones trigonométricas tendremos el resto de funciones
tanh(x) =
senh(x)
;
cosh(x)
sech(x) =
1
;
cosh(x)
csech(x) =
1
;
senh(x)
ctanh(x) =
1
;
tanh(x)
a) Muestre las siguientes equivalencias
cosh(x) = cos(ix),
i senh(x) = sen(ix),
cos(x) = cosh(ix)
y
i sen(x) = senh(x)
b) Muestre las siguientes identidades
sech2 (x) = 1 − tanh2 (x);
cosh(2x) = cosh2 (x) + senh2 (x)
c) Resuelva las siguientes ecuaciones hiperbólicas
cosh(x) − 5senh(x) − 5 = 0,
2 cosh(4x) − 8 cosh(2x) + 5 = 0
y
in
ar
cosh2 (x) − senh2 (x) = 1;
cosh(x) = senh(x) + 2sech(x)
re
lim
d ) La posición de una partı́cula vista desde dos observadores relativistas O y Õ puede expresarse en
término de funciones hiperbólicas como
cosh(φ) −senh(φ)
µ
µ
µ
x̃ = Lν xν con {µ, ν} = 0, 1 y Lν =
senh(φ) cosh(φ)
Bo
rr
ad
o
rP
Encuentre la matriz L̄µν tal que xν = L̄νµ x̃µ
Muestre que ds2 = (x0 )2 − (x1 )2 = (x̃0 )2 − (x̃1 )2 .
65
in
ar
Bibliografı́a
[1] Arfken, G. B.,Weber, H., Weber, H.J. (2000) Mathematical Methods for Physicists 5ta Edición
(Academic Press, Nueva York)
re
lim
[2] Borisenko, A.I, y Tarapov I.E. (1968) Vector and Tensor Analisys (Dover Publications Inc, Nueva
York)
[3] Dennery, P. y Krzywicki, A. (1995) Mathematics for Physicists (Dover Publications Inc, Nueva York)
[4] Harper, C. (1971) Introduction to Mathematical Physics (Prentice Hall, Englewood Cliff, N.J:)
[5] Hassani, S. (1991) Foundations of Mathematical Physics (Prentice Hall, International Edition,
London:
rP
[6] Riley, K.F., Hobson, M.P. y Bence, S.J. (2002) Mathematical Methods for Physics and Engineering (Cambridge University Press)
[7] Santaló, L.A (1969) Vectores y Tensores (Editorial Universitaria, Buenos Aires)
Bo
rr
ad
o
[8] Spiegel, M. (1959) Vector Analysis (Schaums Outline Series, McGraw Hill New York )
66
2
in
ar
Capı́tulo
Bo
rr
ad
o
rP
re
lim
Apéndice
67
2.1. INTRODUCCIÓN A LOS CAS
2.1.
Introducción a los CAS
Los sistemas algebraicos computacionales o sistemas de álgebra computacional (CAS: Computer Algebra
System) son sistemas o calculadoras avanzadas, que permiten realizar operaciones de manera simbólica. Esto
significa que el computador puede efectuar operaciones con ecuaciones y fórmulas simbólicamente, es decir,
a + b = c se interpreta como la suma de variables y no como la suma de números previamente asignados.
Estos sistemas permiten operar de manera exacta con sı́mbolos que representan objetos matemáticos
tales como:
Polinómios, Funciones Racionales, Sistemas de Ecuaciones.
Grupos, Anillos, Algebras . . .
A diferencia de los sistemas tradicionales de computación numérica:
FORTRAN, Basic, C, C++, Java => Precisión fija (Punto Flotante)
in
ar
Números (Enteros, racionales, reales, complejos...)
re
lim
Otra caracterı́stica principal radica en el hecho de que son interactivos (interpretados o ejecutados al momento
de proveer una instrucción), es decir, trabajan de la forma:
Input : solve(problema);
Output : respuesta
Los CAS se pueden clasificar en dos grandes grupos:1
rP
Sistemas de Propósito Especial (Creados para hacer cálculos en un área especı́fica): FORM, GAP,
CAMAL, SHEEP, STENSOR, LiE, KANT.
ad
o
Sistemas de Propósito General (¡Especies de navajas suizas!): Axiom, Derive, Reduce, Maple, MatLab,
Mathematica, Maxima, MuPAD. Recientemente, lenguajes como Python comienzan a incorporar bibliotecas que permiten generar formas de cálculo simbólico2 que ofrecen una perspectiva interesante
para integrar ambientes algebráicos-numéricos-visuales.
Los CAS modernos de propósito general son ambientes completamente integrados de computación para
la investigación y la educación conformados por:
Interfaz gráfica (worksheet) o ambiente interactivo:
Bo
rr
Procesador de texto, de fórmulas y de gráficas.
Con salidas en Latex, RTF, HTML, FORTRAN y C; o hyperlinks a otros documentos.
Manuales en lı́nea.
Enlaces a otros programas y bibliotecas
Capacidades para cálculo numérico
Capacidades para visualización, con salidas gráficas en diferentes formatos: PostScript, GIF,JPG, . . .
Pensado para usuarios no especializados en computación
68
re
lim
in
ar
2.1. INTRODUCCIÓN A LOS CAS
Figura 2.1: Ventana gráfica de vxMaxima
rP
La principal ventaja de estos programas radica en la enorme capacidad para realizar cálculos algebraicos
largos y tediosos. Por ejemplo, se puede demostrar que la función:
√
nz x2 +y 2 +z 2
√ 2 2
sen
y +z
p
f=
2
x + y2 + z2
ad
o
es solución de la ecuación diferencial:
2
∂4f
∂4f
∂2f
∂4f
2 ∂ f
+
+
+
n
+
=0
∂x4
∂y 2 x2
∂z 2 x2
∂x2
∂y 2
Bo
rr
y la realización de éste cálculo le puede tomar a un PC estándar un tiempo de CPU relativamente corto:
tiempo de cpu =
1,065 seg
Un ejemplo de un CAS es Maxima que básicamente consta de una hoja de trabajo (worksheet) que es
una interfaz tipo procesador de textos. Las hojas de trabajo constan de dos modos básicos de funcionamiento:
el modo texto y el modo cálculo. Maxima opera en la celda de cálculos de la manera siguiente:
Input (Instrucción de entrada)
Output (respuesta del programa)
1 Una comparación de los diferentes CAS puede verse en: https://en.wikipedia.org/wiki/List_of_computer_algebra_
systems
2 http://docs.sympy.org/
69
2.2. MAXIMA: SINTAXIS BÁSICA
Existe la posibilidad de introducir textos de la misma manera que en un procesador de textos estándar
y de generar gráficas en 2D y 3D a través de los respectivos comandos.
La interacción con la hoja de trabajo se hace a través de lo que denominamos la celda del Input, que
aparece señalado por un aviso de espera o PROMPT
[ -->
Maxima: Sintaxis básica
re
lim
2.2.
in
ar
El código fuente de Maxima, código de software libre, puede ser compilado sobre diferentes sistemas operativos: Windows, Linux, MacOS X y Android, y puede obtenerse en: http://sourceforge.net/projects/
wxmaxima o en http://andrejv.github.io/wxmaxima, con la respectiva documentación.
Utilizaremos la versión gráfica wxMaxima para los fines pedagógicos del desarrollo de estas notas.
También existe una versión que funciona sólo en modo texto para ser ejecutada en una consola o terminal.
En la Figura 2.1 se puede apreciar el despliegue de una hoja de cálculo con algunos instrucciones sencillas,
notemos que cada instrucción (en azul) termina con un punto y coma, de esta manera se le dice al programa
la finalización del comando a ejecutar. Luego de escribir la instrucción y presionar la tecla Enter el Output
aparecerá a continuación en color negro.
Es necesario familiarizarse con los comandos básicos del programa, para ello iremos desarrollando algunos
cálculos sencillos a manera de conocer la filosofı́a de cómo funciona Maxima, y durante el transcurso de
este curso iremos haciendo un despliegue de las aplicaciones del programa para cálculos más especı́ficos.
(%i1) 3!+3^5;
( %o1) 249
rP
Veamos ahora la diferencia entre el igual = y los dos puntos :
(%i2) a=b+c;
( %o2) c+b
( %o3) a
(%i4) a:b+c;
( %o4) c+b
Bo
rr
(%i5) a;
ad
o
(%i3) a;
( %o5) c+b
Al usar “=”no asignamos a la variable lo que está del lado derecho mientras que con “:”si le asignamos
el objeto a la nueva variable.
Los cálculos se pueden hacer tanto con números enteros como en Punto Flotante:
(%i6) 15+5^(50);
( %o6) 88817841970012523233890533447265640
70
2.2. MAXIMA: SINTAXIS BÁSICA
(%i7) 15.0+5^(50);
( %o7) 8,881784197001253 × 1034
Pero el énfasis radica en los cálculos exactos:
y si queremos el valor numérico podemos escribir
(%i9) float(%);
( %o9) 1,180812852661949
in
ar
(%i8) cos(%pi/12)^2 + log(2/3+5)/7;
π log 17 2
3
+
( %o8) cos
12
7
re
lim
Aquı́ hemos hecho uso de varios sı́mbolos nuevos. Las constantes matemáticas en Maxima se escriben
de la siguiente manera:
La unidad imaginaria i: %i
El número π: %pi.
El sı́mbolo ∞: inf.
El número e: %e.
En cuanto a los logaritmos:
rP
ex = exp(x).
log(x): la función logaritmo en base e
log(x)/log(b) el logaritmo de x en base b.
(%i10)3^12$
Bo
rr
(%i11)%;
ad
o
Para las funciones trigonométricas es lo estándar: sin(x), asin(x), cos(x), acos(x), tan(x), atan(x), csc(x),
sec(x), cot(x).
También hemos utilizado % para introducir la última salida en la siguiente instrucción, veamos nuevamente como funciona, pero ahora pondremos al final del comando el sı́mbolo $ en lugar de ; para decirle al
programa que ejecute la instrucción sin escribir la salida.
( %o11) 531441
Veamos otro ejemplo:
(%i12)alpha;
( %o12) α
(%i13)%+sqrt(beta);
71
2.2. MAXIMA: SINTAXIS BÁSICA
( %o13)
p
β+α
(%i14)%o12+2*gamma^2;
( %o14) 2 γ 2 + α
Es importante tener cuidado a la hora de poner los paréntesis en las expresiones:
(%i15)1+2*3^2;
(%i16)(1+2)*3^2;
( %o16) 27
El volumen de un cilindro V = π(radio)2 × altura
(%i17)radio:5$
re
lim
(%i18)altura:50$
in
ar
( %o15) 19
(%i19)area:%pi*radio^2;
( %o19) 25 π
(%i20)volumen:area*altura;
( %o20) 1250 π
(%i21)volumen;
( %o21) 1250 π
( %o22) done
ad
o
(%i22)kill(all);
rP
Para limpiar la memoria del programa de todas las variables utilizadas se puede usar el comando kill(all)
(Existen otras opciones que veremos más adelante). Esta es una manera de reiniciar la hoja de trabajo.
(%i23)volumen;
( %o23) volumen
Cálculos elementales
Bo
rr
2.2.1.
Se puede definir, evaluar y derivar funciones abstractas utilizando := como se muestra a continuación
(%i1) f(x,y):=exp(x^2+y^2)/(x-y);
exp y 2 + x2
( %o1) f (x, y) :=
x−y
(%i2) f(2,3);
( %o2) − e13
72
2.2. MAXIMA: SINTAXIS BÁSICA
(%i3) %,numer;
( %o3) − 442413,3920089205
(%i4) f(alpha^(1/2),beta^(1/2));
( %o4) √
eβ+α
√
α− β
Derivando respecto a x y y;
2
( %o5)
2
2
2 y ey +x
2 x ey +x
+
x−y
x−y
2
(%i6) f(x):=3*sin(x+1)+2*sqrt(x);
√
( %o6) f (x) := 3 sin (x + 1) + 2 x
(%i7) F:3*sin(x+1)+2*sqrt(x);
√
( %o7) 3 sin (x + 1) + 2 x
(%i8) f(8); F(8);
5
rP
( %o8) 3 sin 9 + 2 2
√ ( %o9) 3 sin (x + 1) + 2 x (8)
re
lim
Aquı́ es bueno acotar que una expresión NO es una función:
in
ar
(%i5) diff(f(x,y),x) + diff(f(x,y),y);
Por lo tanto, F es únicamente una expresión que no puede ser evaluada como la función f . Pero se le
puede dar la vuelta para evaluarla con ev()
(%i10)ev(F,x=8);
5
ad
o
( %o10) 3 sin 9 + 2 2
Consideremos los siguientes cálculos básicos:
(%i11)kill(all)$
Bo
rr
(%i1) sigma(x):=2*x/sqrt(x^2+1);
( %o1) σ (x) := √
2x
x2 + 1
La primera derivada:
(%i2) diff(sigma(x),x);
( %o2) √
2
x2 + 1
−
2 x2
3
(x2 + 1) 2
La cuarta derivada:
73
2.2. MAXIMA: SINTAXIS BÁSICA
(%i3) diff(sigma(x),x,4);
90 x
( %o3)
(x2 + 1)
5
2
−
300 x3
(x2 + 1)
7
2
210 x5
+
9
(x2 + 1) 2
Si queremos reutilizar la derivada para definir una nueva función, en este caso la función derivada, lo
podemos hacer utilizando dos apóstrofos ” (No es la doble comilla)
(%i4) dsigma(x):=’’ %o2;
2
x2 + 1
2 x2
−
3
(x2 + 1) 2
in
ar
( %o4) dsigma (x) := √
(%i5) dsigma(2);
2
3
52
(%i6) integrate(sigma(x),x);
p
( %o6) 2 x2 + 1
re
lim
( %o5)
La misma integral, pero definida para x entre 0 y 1.
(%i7) integrate(sigma(x),x,0,1);
√
( %o7) 2
2−1
rP
Lı́mites:
(%i8) limit(sigma(x),x,1/2);
( %o9) 2
Sumatorias:
ad
o
2
( %o8) √
5
(%i9) limit(sigma(x),x,inf);
(%i10)sum(sigma(i),i,0,6);
Bo
rr
√
10
8
6
4
12
( %o10) √ + √ + √ + √ + √ + 2
37
26
17
10
5
Podemos calcular series de Taylor, digamos, alrededor de x = 1 y hasta orden 4.
(%i11)taylor(sigma(x),x,1,4);
( %o11)
1
1 1
−1 1 1 1
−1 1 4
3
2
5 2 2 (x − 1) +
3 2 2 (x − 1) +
3 2 2 (x − 1) + 2 2 (x − 1) + 2 2 + · · ·
128
16
8
2
Al rededor de x = 0 es más simple todo:
74
2.2. MAXIMA: SINTAXIS BÁSICA
(%i12)taylor(sigma(x),x,0,6);
( %o12)
3 5
x + (−1) x3 + 2 x + · · ·
4
Y por supuesto, también podemos hacer una gráfica de la función. Para ello utilizaremos el comando
wxplot2d que nos generará un gráfico embebido dentro de la misma hoja de trabajo.
(%i13)wxplot2d(sigma(x),[x,-10,10]);
rP
re
lim
in
ar
( %o13)
Los cálculos anteriores se pueden repetir para que queden de una manera más elegante usando una
camilla, esto hará que no se efectúe la evaluación de las operaciones.
1
√
x
Bo
rr
Z
ad
o
(%i14)’diff(sigma(x),x)=diff(sigma(x),x);
d
2x
2
2 x2
√
( %o14)
=√
−
3
dx
x2 + 1
x2 + 1 (x2 + 1) 2
(%i15)’integrate(sigma(x),x,0,1)=integrate(sigma(x),x,0,1);
( %o15) 2
dx = 2
√
2−1
x2 + 1
(%i16)’limit(sigma(x),x,inf)=limit(sigma(x),x,inf);
x
=2
( %o16) 2 lı́m √
x→∞
x2 + 1
(%i17)’sum(sigma(i),i,0,6)=sum(sigma(i),i,0,6);
0
( %o17) 2
6
X
i=0
√
i
i2
√
12
10
8
6
4
=√ +√ +√ +√ +√ + 2
37
26
17
10
5
+1
75
2.2. MAXIMA: SINTAXIS BÁSICA
Anteriormente mencionamos que uno de las ventajas de los programas de manipulación simbólica es la
gran capacidad de llevar a cabo cálculos largos y tediosos, veamos entonces como se hace para demostrar
que la función antes mencionada:
(%i18)f(x,y,z):=sin(n*z*sqrt(x^2+y^2+z^2)/sqrt(y^2+z^2))/sqrt(x^2+y^2+z^2);
√
n z z 2 +y 2 +x2
√ 2 2
sin
z +y
p
( %o18) f (x, y, z) :=
2
z + y 2 + x2
2
∂4f
∂4f
∂4f
∂2f
2 ∂ f
+ 2 2 + 2 2 +n
+ 2 =0
∂x4
∂y x
∂z x
∂x2
∂y
in
ar
es solución de la ecuación diferencial
(%i19)diff(f(x,y,z),x,4)+diff(diff(f(x,y,z),x,2),y,2)+diff(diff(f(x,y,z),x,2),z,
( %o19) (( Expression too long to display! ))
re
lim
2)+n^2*(diff(f(x,y,z),x,2)+diff(f(x,y,z),y,2));
(%i20)ratsimp(%);
( %o20) 0
rP
Aquı́ Maxima no hace un despliegue en la pantalla de los cálculos porque la expresión matemática
es muy larga. Existen opciones para que muestre en pantalla los que nos interese que iremos viendo más
adelante.
Necesitamos entonces decirle al programa que la expresión anterior sea simplificada, es decir, que minimice
la expresión a su valor más simple. Para simplificar expresiones que contienen radicales, exponenciales o
logaritmos es conveniente utilizar el comando ratsimp. También existe la opción fullratsimp
ad
o
En la mayorı́a de los casos Maxima no factoriza ni desarrolla automáticamente las expresiones, por
lo tanto, debemos indicarle al programa que haga las respectivas simplificaciones. Veamos un ejemplo con
polinomios:
(%i21)kill(all)$
(%i1) p:(x+2)*(x-1);
Bo
rr
( %o1) (x − 1) (x + 2)
(%i2) q:(x-3)^2;
2
( %o2) (x − 3)
(%i3) p-q;
( %o3) (x − 1) (x + 2) − (x − 3)
2
(%i4) expand(p-q);
( %o4) 7 x − 11
76
2.2. MAXIMA: SINTAXIS BÁSICA
(%i5) expand(p/q);
( %o5)
x2
x
2
x2
+
−
− 6 x + 9 x2 − 6 x + 9 x2 − 6 x + 9
Si queremos dividir usando fracciones simples podemos hacer lo siguiente:
(%i6) partfrac(p/q,x);
( %o6)
7
10
+
+1
x − 3 (x − 3)2
in
ar
Las funciones logexpand y radexpand permiten controlar si queremos simplificar logaritmos y radicales
cuando contienen productos. Veamos:
(%i7) log(x*y);
(%i8) sqrt(x*y);
√
( %o8) x y
(%i9) sqrt(x^2);
( %o9) |x|
(%i10)radexpand:all$ logexpand:all$
(%i11)log(x*y); sqrt(x*y); sqrt(x^2);
rP
( %o11) √
log y + log x
√
( %o12) x y
( %o13) x
re
lim
( %o7) log (x y)
Lo inverso a la expansión de expresiones es la factorización:
( %o14) 23 52
ad
o
(%i14)factor(200);
(%i15)factor(x^2+x-2);
Bo
rr
( %o15) (x − 1) (x + 2)
(%i16)p:x^3-1;
( %o16) x3 − 1
(%i17)factor(%);
( %o17) (x − 1) x2 + x + 1
La evaluación de expresiones se realiza de la manera siguiente
77
2.2. MAXIMA: SINTAXIS BÁSICA
(%i18)ev(p,x=8);
( %o18) 511
O también
(%i19)p,x=%pi;
( %o19) π 3 − 1
in
ar
(%i20)ev(x+(x+y)^2-3*(x+y)^3,x+y=t);
( %o20) x − 3 t3 + t2
Para finalizar con esta guı́a rápida de Maxima veamos el uso de uno de los comandos más comunes de
estos programas, y que tiene que ver con la solución de ecuaciones.
( %o21) x3 + 2 x2 + 2 x = 2 x2
(%i22)sol:solve(ecu,x);
h
i
√
√
( %o22) x = − 2 %i, x = 2 %i, x = 0
re
lim
(%i21)ecu:3*x^2+2*x+x^3-x^2=2*x^2;
Recordemos que %i es la notación para el imaginario i.
Si necesitamos aislar una de las soluciones usamos el comando rhs (de right-hand side):
rP
(%i23)rhs(part(sol,1)); rhs(part(sol,2));
√
( %o23) √
− 2 %i
( %o24) 2 %i
Para un sistema de ecuaciones, digamos, dos ecuaciones con dos incógnitas:
ad
o
(%i25)ecu1:x^2+y^2=1;
( %o25) y 2 + x2 = 1
(%i26)ecu2:(x-2)^2+(y-1)^2=4;
2
2
Bo
rr
( %o26) (y − 1) + (x − 2) = 4
(%i27)solve([ecu1,ecu2],[x,y]);
4
3
( %o27) x = , y = − , [x = 0, y = 1]
5
5
Cuando el sistema no tiene solución Maxima responde de la siguiente manera
(%i28)solve([x+y=0,x+y=1],[x,y]);
78
2.2. MAXIMA: SINTAXIS BÁSICA
( %o28) [ ]
En el caso de un sistema que tiene más incógnitas que ecuaciones el programa utiliza los sı́mbolos
%r1 , %r2 ... para indicar los parámetros arbitrarios
(%i29)solve([x+y+z=9,x-y=2*z],[x,y,z]);
3 %r1 − 9
%r1 + 9
,y = −
, z = %r1
( %o29) x =
2
2
(%i30)ecus:[x+y+z+w=1,x-y+z-w=-2,x+y-w=0];
( %o30) [z + y + x + w = 1, z − y + x − w = −2, y + x − w = 0]
re
lim
(%i31)linsolve(ecus,[x,y,z]);
4w − 3
2w − 3
( %o31) x =
,y = −
,z = 1 − 2w
2
2
in
ar
En lugar de solve se puede recurrir a un comando diferente que hace lo mismo, pero que es más eficiente
desde el punto de vista de los recursos usados por el computador, el comando es linsolve para ecuaciones
lineales.
En el caso de polinómios de orden superior el resultado estará dado de forma aproximada:
(%i32)ec:x^7+x^5-x^3+x-2;
( %o32) x7 + x5 − x3 + x − 2
rP
(%i33)allroots(ec);
ad
o
[ x=0.766414088337633 %i+0.5507199727230275 ,
x=0.5507199727230275-0.766414088337633 %i ,
x=0.4922671445862202 %i - 0.9637112977011089 ,
x=-0.4922671445862202 %i -0.9637112977011089 ,
x=1.381985877916414 %i -0.08700867502191806 ,
x=-1.381985877916414 %i -0.08700867502191806 ,
x=0.9999999999999988 ]
(%i34)realroots(ec);
Bo
rr
( %o34) [x = 1]
Otro tipo de ecuaciones a resolver son las ecuaciones diferenciales. Veamos como funciona con la ecuaciones
diferenciales ordinarias
(%i35)ecd:(2*x+1)*’diff(y,x)+y*(x-1)=0;
d
y + (x − 1) y = 0
( %o35) (2 x + 1)
dx
(%i36)ode2(ecd,y,x);
79
2.2. MAXIMA: SINTAXIS BÁSICA
( %o36) y = %c e
3 log(2 x+1)
−x
4
2
Por ser una ecuación diferencial de primer orden debe aparecer una constante en la solución. La constante
aquı́ es denotada por “ %c”.
(%i37)ecd2:’diff(y,x,2)-3*’diff(y,x)+2*y=x;
d
d2
y−3
( %o37)
y + 2y = x
d x2
dx
(%i38)ode2(ecd2,y,x);
in
ar
2x + 3
4
( %o38) y = %k1 e2 x + %k2 ex +
Para el caso de que se tengan condiciones iniciales utilizamos ic2 para indicar las condiciones
( %o39) y =
5 e2 x
2x + 3
− 2 ex +
4
4
Y para valores de contorno bc2
re
lim
(%i39)ic2(%o38,x=0,y=0,diff(y,x)=1);
(%i40)bc2(%o38,x=0,y=0,x=1,y=0);
3 e2 − 5 ex
2x + 3
(3 e − 5) e2 x
−
+
( %o40) y =
4 e2 − 4 e
4 e2 − 4 e
4
rP
Existe el comando desolve para resolver también ecuaciones o sistemas de ecuaciones diferenciales ordinarias lineales utilizando transformadas de Laplace. Trabaja de manera parecida a ode2 pero se necesita
especificar la dependencia de las funciones con las variables independientes.
(%i41)ecd3:’diff(y(x),x,2)-y(x)=2*x;
d2
y (x) − y (x) = 2 x
d x2
(%i42)desolve(ecd3,[y(x)]);
ex ddx y (x)x=0 + y (0) + 2
e−x
( %o42) y (x) =
−
2
ad
o
( %o41)
d
dx
y (x)x=0 − y (0) + 2
− 2x
2
Si tenemos condiciones iniciales en x = 0 entonces podemos escribir:
Bo
rr
(%i43)atvalue(y(x),x=0,1); atvalue(diff(y(x),x),x=0,2);
( %o43) 1
( %o44) 2
(%i45)desolve(ecd3,[y(x)]);
( %o45) y (x) =
5 ex
3 e−x
−
− 2x
2
2
Si desolve no encuentra una solución, entonces devuelve “false”.
80
2.2. MAXIMA: SINTAXIS BÁSICA
Veamos un ejemplo de un sistema de ecuaciones diferenciales
(%i46)ecd_1: ’diff(f(x),x)=’diff(g(x),x)+sin(x);
d
d
f (x) =
g (x) + sin x
dx
dx
(%i47)ecd_2: ’diff(g(x),x,2)=’diff(f(x),x)-cos(x);
( %o46)
d
d2
g (x) =
f (x) − cos x
2
dx
dx
(%i48)atvalue(’diff(g(x),x),x=0,a)$ atvalue(f(x),x=0,b)$ atvalue(g(x),x=0,c)$
(%i51)desolve([ecd_1, ecd_2], [f(x),g(x)]);
( %o51) [f (x) = a ex + b − a, g (x) = cos x + a ex + c − a − 1]
(%i52)kill(all)$
Operaciones básicas con matrices:
in
ar
( %o47)
rP
re
lim
(%i1) A:matrix([1,2,3],[4,5,6],[7,8,9]);B:matrix([9,8,7],[6,5,4],[3,2,1]);
1 2 3
( %o1) 4 5 6
7 8 9
9 8 7
( %o2) 6 5 4
3 2 1
(%i3) A+B;
10 10 10
( %o3) 10 10 10
10 10 10
(%i4) A.B;
30
( %o4) 84
138
ad
o
El producto ordinario de matrices:
24
69
114
18
54
90
El producto elemento a elemento
Bo
rr
(%i5) A*B;
9 16 21
( %o5) 24 25 24
21 16 9
El cociente elemento a elemento
(%i6) A/B;
81
2.2. MAXIMA: SINTAXIS BÁSICA
1
( %o6)
9
2
3
7
3
1
4
1
4
3
7
3
2
9
El producto por un escalar:
(%i7) n*A;
n 2n
( %o7) 4 n 5 n
7n 8n
3n
6 n
9n
in
ar
Podemos generar matrices de muchas maneras
(%i9) A:genmatrix(a,4,4);
2
5 10 17
5
8 13 20
( %o9)
10 13 18 25
17 20 25 32
También de manera interactiva:
(%i10)n:3$
(%i11)M:entermatrix(n,n)$
4. General
ad
o
(%i12)M;
3
(y + x)
( %o12)
0
0
3. Antisymmetric
rP
Is the matrix 1. Diagonal 2. Symmetric
Answer 1, 2, 3 or 4 : 1;
Row 1 Column 1: (x+y)^n$
Row 2 Column 2: (x-y)^(n+1)$
Row 3 Column 3: (x.y)^(n-1)$
Matrix entered.
re
lim
(%i8) a[i,j]:=i^2 + j^2$
0
4
(x − y)
0
0
0
2
(x · y)
Bo
rr
La matriz identidad de tamaño n x n usamos el comando ident(n), como mostramos a continuación
(%i13)ident(4);
1 0 0
0 1 0
( %o13)
0 0 1
0 0 0
0
0
0
1
82
2.2. MAXIMA: SINTAXIS BÁSICA
2.2.2.
Bibliotecas
No todos los comandos están disponibles en la memoria cuando el programa es iniciado. Sólo los comandos estándar son cargados automáticamente. Pero podemos contar con funciones adicionales para trabajar
cargando al programa los diferentes paquetes, módulos o librerı́as que dispone Maxima. Por ejemplo, el
paquete vect nos permite introducir vectores y operar con ellos.
El paquete vect debe entonces ser previamente cargado y se hace de la manera siguiente:
(%i1) load(vect)$
in
ar
Las operaciones básicas de suma, resta, multiplicación y multiplicación por escalares de vectores las
podemos ver a continuación, pero primero debemos saber como introducir los vectores al programa.
Por ejemplo, para los vectores a = 2i + 4j + 6k, b = 5i + 7j + 9k y c = i + 3j, tenemos:
(%i2) a:[2,4,6];
( %o2) [2, 4, 6]
(%i3) b:[5,7,9];
re
lim
( %o3) [5, 7, 9]
(%i4) c:[1,3,0];
( %o4) [1, 3, 0]
(%i5) a+b+c;
( %o5) [8, 14, 15]
( %o6) [30, 44, 63]
rP
(%i6) 3*a+5*b-c;
Si queremos calcular el módulo de los vectores podemos hacerlo definiendo una función: la función módulo,
como mostramos a continuación:
ad
o
(%i7) modulo(a):=sqrt(a.a);
√
( %o7) modulo(a) := a.a
Bo
rr
(%i8) modulo(a); modulo(b); modulo(c);
√
( %o8) 2√ 14
( %o9) √155
( %10) 10
Para el producto escalar usamos un punto
(%i11)a.b;
( %11) 92
Mientras que para el producto vectorial debemos usar la tilde ∼ y escribir lo siguiente
83
re
lim
in
ar
2.2. MAXIMA: SINTAXIS BÁSICA
Figura 2.2: Curvas integrales para y 0 = −x + e−y
( %o12) [−6, 12, −6]
(%i13)express(b~a);
ad
o
( %o13) [6, −12, 6]
rP
(%i12)express(a~b);
De manera que el producto triple lo podemos calcular asi:
(%i14)c.(express(a~b));
( %o14) 30
Bo
rr
Otra librerı́a que podemos explorar es plotdf que nos permite realizar gráficos del tipo y 0 = f (x, y) y
hacernos una idea de cómo es la solución de ésta ecuación diferencial.
(%i1) load(plotdf)$
La librerı́a plotdf nos permite estudiar los campos de direcciones y las curvas integrales a través del
estudio de las pendientes. Veamos la siguiente ecuación diferencial
y 0 = −x + e−y
su solución, de manera gráfica, es decir los campos de direcciones lo podemos obtener escribiendo el siguiente
84
re
lim
in
ar
2.2. MAXIMA: SINTAXIS BÁSICA
Figura 2.3: Curva integrales para y 0 = −x + e−y y que pasa por el punto (2, 3)
(%i2) plotdf(-x+exp(-y));
rP
comando.
ad
o
La gráfica que resulta puede verse en la Figura 2.2 y cada curva integral (curvas en rojo) se obtiene
haciendo un “click”sobre un punto de la gráfica, esto generará la curva integral que pasa por ese punto.
Por otra parte, existen varias opciones para el comando plotdf. Supongamos que queremos la trayectoria
que pase por el punto especı́fico (2, 3). Para tal fin escribimos
(%i3) plotdf(-x+exp(-y),[trajectory_at,2,3]);
Bo
rr
Y la gráfica obtenida puede verse en la Figura 2.3.
También nos podemos encontrar con que la ecuación diferencial depende de algún parámetro, digamos
κ. Por ejemplo
y 0 = −x + κe−y
y nos gustarı́a obtener una gráfica para algún valor del parámetro en partı́cular, digamos κ = −0,5. Entonces
podemos escribir
(%i4) plotdf(-x+exp(-kappa*y),[parameters,"kappa=-0.5"]);
O, si queremos recorrer, en una misma figura, los diferentes valores del parámetro usamos la opción
sliders, como se muestra a continuación
85
re
lim
in
ar
2.2. MAXIMA: SINTAXIS BÁSICA
Figura 2.4: Curva integrales para y 0 = −x + κe−y y para diferentes valores de κ.
rP
(%i5) plotdf(-x+exp(-kappa*y),[parameters,"kappa=-0.5"],[sliders,"kappa=-3:3"]);
Bo
rr
ad
o
La gráfica que se obtiene se muestra en la Figura 2.4, y como se puede ver, en la parte inferior aparece un
botón deslizante y el valor del parámetro κ. Al deslizar el botón, estaremos cambiando el valor del parámetro
que en este caso variará entre −3 y 3, podremos apreciar entonces como los campos de direcciones y las curvas
integrales seleccionadas cambian.
86
2.2. MAXIMA: SINTAXIS BÁSICA
2.2.3.
Maxima en modo texto
re
lim
Obatala%maxima
Maxima 5.36.1 http://maxima.sourceforge.net
using Lisp SBCL 1.2.10
Distributed under the GNU Public License. See the file COPYING.
Dedicated to the memory of William Schelter.
The function bug_report() provides bug reporting information.
(%i1) integrate( tan(x), x );
(%o1)
log(sec(x))
(%i2) float(sqrt(%pi));
(%o2)
1.772453850905516
(%i3) quit();
in
ar
Es posible utilizar Maxima en un computador que funcione bajo alguno de los diferentes versiones de
sistemas operativos tipo UNIX, como por ejemplo Linux, esto lo podemos hacer cuando no queremos utilizar
el ambiente gráfico. Podemos recurrir al ambiente de texto escribiendo el comando maxima en un terminal
de nuestro computador, esto hará que entremos en un ambiente de cálculo que funcionará exclusivamente en
modo texto y aparecerá, luego de una bienvenida, el aviso de espera o prompt. Para finalizar una sesión en
Maxima se utiliza el comando quit().
Esta posibilidad que ofrece el programa es muy conveniente a la hora de realizar grandes cálculos ya que
podemos dejar el proceso en modo “background” y utilizar el computador en otra actividad.
Al entrar en este modo al programa tendremos un mensaje como el que se muestra a continuación y
donde aprovecharemos de hacer un par de cálculos a modo de ejemplo.
Obatala% maxima < archimax.txt
rP
Sobre UNIX podemos utilizar los archivos de entradas y salidas estándar para leer e imprimir información
en el terminal: <, >, |.
ad
o
Con esta instrucción Maxima ejecutará todos los comandos que se encuentran en el archivo de texto
archimax.txt e irá mostrando los resultados en pantalla
En la siguiente instrucción Maxima ejecutará todos los comandos que se encuentran en el archivo de
texto archimax.txt pero escribirá los resultados en el archivo de salida llamado archimax.out
Obatala% maxima < archimax.txt > archimax.out
También se puede hacer que todos los comandos del archivo sean ejecutados para luego ser enviados al
terminal pero paginados.
Bo
rr
Obatala% maxima < archimax.txt | more
Maxima puede ser detenido temporalmente con el comando “Control Z” de manera que para poner
procesos en “background” se procede de la manera usual:
Obatala% maxima < archimax.txt > archimax.out
^Z
Suspended
Obatala%> bg
[2] maxima < archimax.txt > archimax.out &
Obatala%
87
2.2. MAXIMA: SINTAXIS BÁSICA
O si lo preferimos, y de manera equivalente, podemos escribir la instrucción pero ponemos al final &
Obatala% maxima
[1] 5114
2.2.4.
< archimax.txt > archimax.out &
Invocando la ayuda
El ambiente wxMaxima permite acceder al manual de ayuda fácilmente visible en la barra de herramientas, parte superior de la ventana. Pero también si conocemos el comando podemos escribir, por ejemplo:
0: diff (Functions and Variables for Differentiation)
1: diff <1> (Functions and Variables for Differentiation)
2: diff <2> (Functions and Variables for itensor)
Enter space-separated numbers, ‘all’ or ‘none’:
in
ar
(%i1) describe(diff);
re
lim
Al seleccionar una de las opciones, por ejemplo si escribimos 1 después de los dos puntos, aparecerá la
descripción completa del comando:
Bo
rr
ad
o
rP
-- Function: diff
diff (<expr>, <x_1>, <n_1>, ..., <x_m>, <n_m>)
diff (<expr>, <x>, <n>)
diff (<expr>, <x>)
diff (<expr>)
Returns the derivative or differential of <expr> with respect to
some or all variables in <expr>.
’diff (<expr>, <x>, <n>)’ returns the <n>’th derivative of <expr>
with respect to <x>.
’diff (<expr>, <x_1>, <n_1>, ..., <x_m>, <n_m>)’ returns the mixed
partial derivative of <expr> with respect to <x_1>, ..., <x_m>. It
is equivalent to ’diff (... (diff (<expr>, <x_m>, <n_m>) ...),
<x_1>, <n_1>)’.
’diff (<expr>, <x>)’ returns the first derivative of <expr> with
respect to the variable <x>.
’diff (<expr>)’ returns the total differential of <expr>, that is,
the sum of the derivatives of <expr> with respect to each its
variables times the differential ’del’ of each variable. No
further simplification of ’del’ is offered.
The noun form of ’diff’ is required in some contexts, such as
stating a differential equation. In these cases, ’diff’ may be
quoted (as ’’diff’) to yield the noun form instead of carrying out
the differentiation.....
There are also some inexact matches for ‘diff’.
Try ‘?? diff’ to see them.
También podemos utilizar:
(%i2) apropos("diff");
88
2.3. EJERCICIOS
[covdiff,diff,maxtaydiff,pdiff_diff_var_names,pdiff_prime_limit...]
O pedirle al programa algunos ejemplos
(%i3) example(diff);
kill(f,g,h,x,y)
done
diff(sin(x)+x^3+2*x^2,x)
cos(x)+3*x^2+4*x
diff(sin(x)*cos(x),x)
cos(x)^2-sin(x)^2
diff(sin(x)*cos(x),x,2)
-4*cos(x)*sin(x)
in
ar
(%i4)
(%o4)
(%i5)
(%o5)
(%i6)
(%o6)
(%i7)
(%o7)
.
.
.
2.3.
Ejercicios
1. Calcule:
2. Para la siguiente función
rP
a) los 70 primeros decimales del número e
b) el arco coseno hiperbólico de 1
c) la expansión de sin(2 arctan(x))
re
lim
Las ayudas completas de Maxima se pueden consultar en: http://maxima.sourceforge.net/es/
(x + 1)3
f (x) = √
x2 − 1
Calcule
∂f (x) ∂f (x)
∂x , ∂x2
ad
o
a)
b)
Z
c)
Z
f (x)dx ,
Bo
rr
lı́m f (x) ,
x→∞
4
f (x)dx
2
lı́m f (x) ,
x→−∞
lı́m f (x)
x→0
d ) Haga un gráfico de f (x) para valores de x ∈ [−5, 5].
3. Encuentre las raı́ces de
p = x7 + x5 + 2x + x
4. Resuelva la siguiente ecuación diferencial
x
dy(x)
= y(x) ln(xy(x)) − y(x);
dx
y haga una gráfica del campo de direcciones que muestre algunas curvas integrales.
89
2.3. EJERCICIOS
5. Resuelva la siguiente ecuación diferencial
dy(t)
d2 y(t)
− 1 − y(t)2
+ y(t) = 0 ,
d2 t
dt
con: y(0) = 0 ,
dy(t)
= −0,1
dt
6. Realice los ejercicios de la sección 1.5 con la ayuda de la librerı́a vect de Maxima.
7. En un archivo de texto escriba las siguientes instrucciones que tienen que ver con operaciones de
números complejos:
re
lim
in
ar
z_1=1+2%i;
z_2=3+4%i;
z_1+z_2;
z_1*z_2;
expand(%);
z_1/z_2;
rectform(%);
polarform(%);
guarde el archivo con el nombre pruebamax.txt y en un terminal de su computador, y en el mismo
directorio donde está el archivo escriba:
localhost%
maxima < pruebamax.txt > pruebamax.out &
Bo
rr
ad
o
rP
y verifique que en el archivo pruebamax.out se haya realizado los cálculos.
90


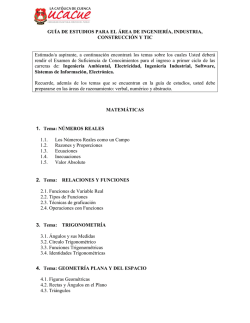

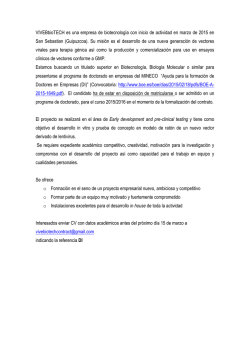
© Copyright 2026