
pendulo invertido y su respectivo sistema de control
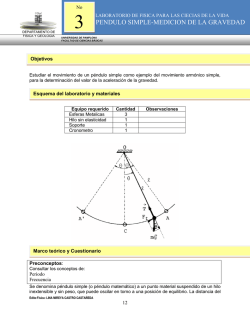
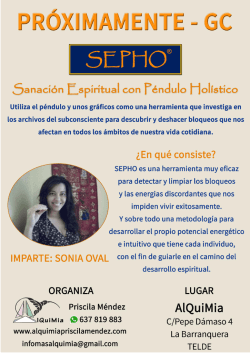
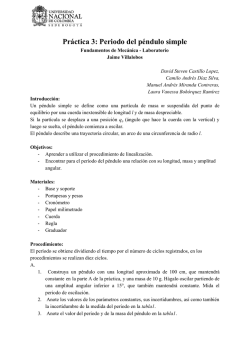
XIV Jornadas de Ingeniería Tecnología e Innovación Universidad de Caldas, 20 a 22 de Octubre de 2015 PENDULO INVERTIDO Y SU RESPECTIVO SISTEMA DE CONTROL a Cárdenas Espinosa Rubén Daríoa, Daza Henryb PhD Technology Information, Líder Sistema de Investigación, Desarrollo Tecnológico e Innovación, SENA Regional Caldas, Centro de Automatización Industrial. Manizales, Colombia b Esp Informática y Computación, Instructor, SENA Regional Caldas, Centro de Automatización Industrial. Manizales, Colombia. [email protected] Resumen En este artículo se presenta un diseño no convencional de un prototipo de péndulo invertido, el proceso de análisis, diseño, simulación e implementación de su respectivo sistema de control como resultado de los proyectos de Investigación aplicada que se adelantan en el Centro de Automatización Industrial del SENA Regional Caldas, para que de manera didáctica puedan analizar, validar y confrontar la Teoría de Control en una aplicación Real, empleando software CAD Solidworks, MATLAB y Labview. La aplicabilidad práctica del sistema de control del Péndulo Invertido la podemos encontrar en ramas de la ingeniería como grúas, brazos robóticos, puente grúas, y en el área de la biología en el caminar bípedo en autómatas planares, (Máquina que imita la figura y los movimientos de un ser animado en un espacio geométrico que es bidimensional o plano) así como los conceptos básicos para el desarrollo de un modelo físico de caminante bípedo, el cual tiene la característica fundamental de abordar el problema del avanzar hacia delante de forma individual, evitando las complicaciones que van enlazadas con las producidas del balance lateral; Por intuición puede saberse que el péndulo posee un punto de equilibrio en la posición recta y se acelerará en la dirección en la que caiga, sabiendo que mientras más lejos de la vertical se encuentre, más rápido se acelerará Introducción: Este proyecto de investigación aplicada se basará en la aplicación de técnicas de control para un sistema mecánico diseñado de forma no convencional, está soportado bajo la plataforma National Instruments, el Leguaje de Programación Labview y los Programas MATLAB y Solidworks. Materiales y métodos: Herramientas e instrumentos de medición del laboratorio de electrónica como son fuentes, voltímetros, cautín, tarjeta de adquisición de datos, entre otros. Documentación de la biblioteca del SENA Regional Caldas. Los Software de Solidworks, Matlab y Labview estos son licenciados por el SENA. De acuerdo con los objetivos propuestos para el proyecto descrito en este artículo, se inscribe en el enfoque empírico analítico, carácter descriptivo y corte transversal. Resultados y Discusión: En la figura 1 encontraremos el diseño mecánico realizado, el ensamble de la parte inferior o base del péndulo y su parte superior permiten la realización de varios análisis que se implementaron en MATLAB para determinar el modelo matemático (Ecuación) del sistema para realizar su respectivo análisis de estabilidad y diseño de su sistema de control. XIV Jornadas de Ingeniería Tecnología e Innovación Universidad de Caldas, 20 a 22 de Octubre de 2015 Figura 1 Diseño Mecánico del Péndulo Invertido Para el prototipo visualizado en la figura 2, se encuentran factores que influyen al momento de realizar el análisis correspondiente. La parte móvil es de polímero, lo que produce fricción y en las llantas sobre las que se desliza el vehículo, el torque del motor no lo logra impulsar, provocando de esta manera deslizamiento entre las llantas y la superficie. Figura 2 Primer Prototipo Péndulo Invertido La Figura 3 ilustra el prototipo de péndulo invertido implementado. Figura 3 Prototipo implementado Péndulo Invertido Conclusiones: 1. El primer prototipo diseñado, la salida del motor pierde adherencia con la superficie que hace contacto con la rueda, su respuesta presenta retraso referente al lado de reacción y por más que se XIV Jornadas de Ingeniería Tecnología e Innovación Universidad de Caldas, 20 a 22 de Octubre de 2015 sintonice el diseño mecánico no responde al control planteado. Esto es porque el motor esta acoplado en una rueda en una relación directa y en la otra rueda no, esto hace que ocurra el desfase porque no es lo mismo arrastrar que empujar. 2. El análisis de elementos finitos de cada pieza dio como resultado que el diseño cumple con las condiciones para las que fue diseñado como prototipo de péndulo invertido siendo una novedad y demostrando que el torque que eran un factor relevante en este diseño se corrigió y se mejoró dándole un aspecto inusual en diseño de un péndulo invertido. 3. Los controladores PID desarrollados en MATLAB ofrecen mejor controlabilidad que los sistemas desarrollados en Labview debido a que son sistemas simulados virtualmente y ofrecen condiciones ideales de trabajo. Palabras clave: Péndulo Invertido, Solidworks, MATLAB y Labview. Referencias: CARDENAS ESPINOSA, Rubén Darío, Orozco Osorio Pérez Cardona Pineda Palacio, 2009, Diseño, Análisis y Simulación de un Prototipo de Péndulo Invertido y su respectivo Sistema de Control para el Laboratório de Control de la UAN Sede Manziales, Múnich, Editorial GRIN GmbH, http://www.grin.com/es/ebook/164094/diseno-analisis-y-simulacion-de-un-prototipo-de-pendulo-invertido-y-su OGATA KATSUHIKO, “Ingeniería de Control Moderna”, Tercera edición, Prentice-Hall Hispanoamérica, México D.F., 1998 OGATA KATSUHIKO, “Sistemas de Control en Tiempo Discreto”, Segunda edición, Prentice-Hall Hispanoamérica, México D.F., 1996. Archivos de Solidworks. (2009) productos de Solidworks. http://www.solidworks.com/sw/products/free-cadsoftware-downloads.htm [Visitado el 22 septiembre 2012] Rodamientos. Disponible en http://es.wikipedia.org/wiki/Rodamiento [Visitado el 29 de septiembre de 2013] Selección de cojinetes de rodamientos. Disponible en http://www2.ing.puc.cl/~icm2312/apuntes/roda/roda5.html [Visitado el 7 de octubre del 2014] Productos skf. Disponible en http://www.skf.com/portal/skf_co/home/products?contentId=187840&lang= [Visitado el 7 octubre del 2014]

© Copyright 2026