
automatizacion y control industrial
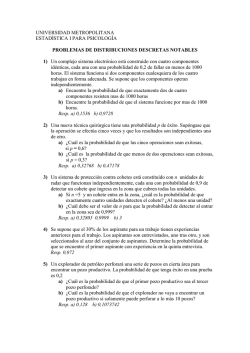
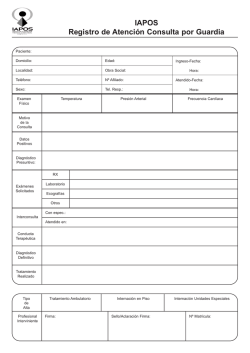
ESCUELA POLITÉCNICA NACIONAL Laboratorio de Sistemas de Control Automático PRÁCTICA Nº 7: 1. ANÁLISIS DE RESPUESTA TRASITORIA Y PERMANENTE OBJETIVO: Analizar el comportamiento de sistemas de primer y segundo orden en estado estable y permanente. Analizar los errores en estado estacionario de sistemas de distinto orden. Conocer las características permanentes y transitorias de sistemas continuos lineales. 2. TRABAJO PREPARATORIO 2.1 Para el sistema mecánico de la Figura 1, donde la entrada es la fuerza F y las salidas son las velocidades y a. Obtener el modelo a espacios de estado del sistema b. Calcular las funciones de trasferencia y c. Si M1 = 1 kg.; M2 = 0.5 kg.; f1= f2 = 1 N/m/seg.; k=1 N/m. i. Encontrar analíticamente los errores en estado estable para entradas de prueba: paso, rampa y parábola. ii. Obtener analíticamente las salidas del sistema y si F es una función paso unitario, una rampa con pendiente 1 y parábola con constante de crecimiento 1. Figura 1 2.2 En la Figura 2, se presenta el diagrama de bloques del sistema de control de posición y velocidad de una de las articulaciones de un brazo robótico industrial. DEPARTAMENTO DE AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Pág. 1 ESCUELA POLITÉCNICA NACIONAL Laboratorio de Sistemas de Control Automático Figura 2 Dónde: i. ii. iii. Encontrar la función Calcular los errores de estado estacionario que tendrá la posición y velocidad del brazo robótico, cuando C(s) es una ganancia de valor unitario y la señal de perturbación es nula, si la entrada es tipo: a) escalón unitario y b) rampa. ¿Cuáles serán los nuevos valores de los errores anteriores si la señal de perturbación es un escalón unitario? 2.3. Consultar el comando stepinfo de Matlab 3. TRABAJO PRÁCTICO 3.1 En el archivo “DatosPract7.mat” encontrará los datos de tres sistemas distintos (primer y segundo orden) según el esquema representado en la Figura 3. Las salidas de los sistemas son: resp_s1, resp_s2, resp_s3; y los tiempos correspondientes a cada una de las salidas son t_s1,t_s2,t_s3. La entrada u(t) es una señal paso unitario para los tres sistemas. u(t) resp_sj(t) Gj(s) Figura 3 DEPARTAMENTO DE AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Pág. 2 ESCUELA POLITÉCNICA NACIONAL Laboratorio de Sistemas de Control Automático i. ii. Graficar las tres respuesta y establecer el orden de cada uno de los sistemas que ellas representan. Encontrar a partir de cada una de las respuestas de los tres sistemas los parámetros que caracterizan la respuesta transitoria y la ubicación de los polos de cada sistema, la ganancia en estado estable, y su respectiva función de transferencia : 3.2 Si al sistema que se obtuvo a partir de resp_s3 y t_s3, se cierra el lazo con una realimentación unitaria, determinar los parámetros de la respuesta transitoria y en estado estable. Comente sus resultados. 3.3 Si al sistema que se obtuvo a partir de resp_s3 y t_s3, se agrega un polo en el origen y se cierra el lazo con una realimentación unitaria, determinar los parámetros de la respuesta transitoria y en estado estable. Comente sus resultados. 3.4 Utilizando Matlab/Simulink encontrar parámetros que caracterizan la respuesta transitoria y los errores en estado estable del problema 2.1. 3.5 Utilizando Matlab/Simulink encontrar parámetros que caracterizan la respuesta transitoria y los errores en estado estable del problema 2.2 (ii) y 2.2 (iii). 4. INFORME 4.1 Presentar una tabla comparativa de los datos obtenidos matemáticamente y los implementados en Matlab/Simulink de los parámetros: tiempo de levantamiento, tiempo pico, máximo sobreimpulso, tiempo de establecimiento y error en estado estable. 4.2 Analice la respuesta transitoria y en estado estable del problema 2.2 del trabajo preparatorio si . 4.3 Conclusiones y recomendaciones. NOTA: La práctica inicia el lunes 15 de junio de 2015 DEPARTAMENTO DE AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Pág. 3
© Copyright 2026