
S2_02_Calidad Metrica RPAS_Ruben Buron
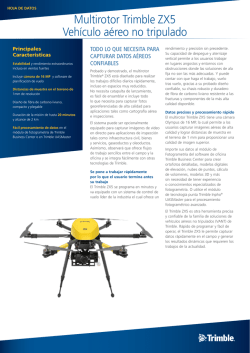
1/07/2015 RPAS/UAV: Análisis de los factores que influyen en la calidad métrica de los resultados. Rubén Burón GEOTRONICS Foco Mostrar un mejor conocimiento de los elementos clave a considerar al elegir un UAS cuyo objetivo sea la precisión – Todos los UAS del mercado vuelan y tienen cámaras – Intentaremos ir más allá de la comparación de especficaciones técnicas e intentar entender los elementos diferenciales Determinando los elementos clave que influyen en la calidad de los datos Comparativa de proyectos ilustrando esas influencias 1 1/07/2015 Foco Elementos importantes a considerar para obtener una buena calidad métrica Flight Behavior Sensor Size Processing Optimized Software Camera RPAS: Definiciones y Orígenes GEOTRONICS: Soluciones Trimble UAS Aerial Imaging 2 1/07/2015 ¿Qué es UAS/RPAS? Un vehículo aéreo no tripulado (UAV), comúnmente conocido como dron, es una aeronave sin piloto. El término Sistema aéreo no tripulado (UAS) resalta la importancia de otros elementos aparte de la aeronave. Un UAS standard está compuesto por: – Aeronave – Sistema de control, por ejemplo Ground Control Station(GCS) – Sistema de comunicaciones RPAS (REMOTELY PILOTED AIRCRAFT SYSTEMS). Su vuelo es controlado automáticamente por una unidad de control situada en la aeronave o por control remoto desde el terreno. Los Inicios Primera fotografía aérea (1858) Gaspard Tournachon, “Nadar”(1820-1910) 3 1/07/2015 Los Inicios Palomas Los Inicios Ala fija, 1979 Przybilla & Wester- Ebbinghaus Altura de vuelo 150 m. Velocidad 11 m/s Helicóptero, 1980 Wester-Ebbinghaus Altura de vuelo 10-100 m. 4 1/07/2015 Clasificación de los UAVs GEOTRONICS: Soluciones Trimble UAS Aerial Imaging Clasificación UAVs según motorización y peso Más pesados que el aire Ala flexible Ala fija Ala giratoria Sin energía Balones Ala Delta Parapente Cometa Planeador Cometa giratoria Con energía Más ligeros que aire Dirigibles Parapente Hélice Motor propulsión Helicóptero Coaxial Quadrotor Multi-rotor Van Blyenburgh, 1999. 5 1/07/2015 UAV de Ala Fija Sistemas de Lanzamiento UAV de Ala Fija Sistemas de Aterrizaje 6 1/07/2015 UAV de Ala Fija Características Vuelan en condiciones meteorológicas adversas Fiabilidad en condiciones extremas Gran autonomía de vuelo. Levantamiento de grandes extensiones. Facilidad de control y guiado UAV de Ala Rotatoria Clasificación 7 1/07/2015 UAV de Ala Rotatoria Características Quadrotor / Multirotor: Mayor versatilidad y portabilidad. 1 rotor / Coaxial: Experiencia en pilotaje y problemas con las vibraciones Quadrotor / Multirotor: Menor capacidad de carga. Quadrotor / Multirotor: Menor velocidad y autonomía Tipos de Sensores GEOTRONICS: Soluciones Trimble UAS Aerial Imaging 8 1/07/2015 Sensores Sensores pasivos y activos RGB Multiespectral Térmicos Características de las cámaras RGB Resolución Focal Fijadel sensor Tamaño full frame full frame APS-C 1/1.7” 1/1.7” 7.60 x 5.70 mm APS-C 23.40 x 15.60 mm 9 1/07/2015 Tamaño del Sensor Relación señal / ruido 1/1.7” 6.16 x 4.62 mm APS-C 23.40 x 15.60 mm Tamaño del Sensor Rango Dinámico 1/1.7” 6.16 x 4.62 mm APS-C 23.40 x 15.60 mm 10 1/07/2015 Tamaño del Sensor Sensibilidad 1/1.7” 6.16 x 4.62 mm APS-C 23.40 x 15.60 mm Proyecto Comparativo GEOTRONICS: Soluciones Trimble UAS Aerial Imaging 11 1/07/2015 Condiciones del Proyecto Vientos: 6 km/h Tiempo: Soleado Área: 500 x 500 m Recubrimiento: 80 % (longitudinal y trasnversal) Nº de puntos de control: 7 Puntos de chequeo: 13 Ground Sample Distance (GSD): 2.4cm Vuelo Velocidad 80 km/h Alta velocidad Estabilidad en la adquisición de imágenes • Datos consistentes Velocidad inferior Baja velocidad “Dancing in the air” • Reducción del recubrimiento • Huecos sin datos 12 1/07/2015 Vuelo Velocidad inferior “Shaky Image blur” Velocidad 80 km/h Estabilidad en la toma Tamaño del sensor Gran tamaño de sensor • • • Alta sensibilidad High dynamic range (alto contraste en zonas de luz y sombra y reducción de zonas con sobreexposición) Relación señal/ruido Tamaño de sensor menor • • Baja calidad de colores de la ortofoto Zonas con sobreexposición (carretera y tejado) Menos tie points Peor precisión 13 1/07/2015 Data acquisition system Distorsión de un terreno horizontal sin usar GCPs Sistema Optimizado para Fotogrametría • • • Otra Solución • • • Estabilidad en el vuelo Tamaño de sensor Geometría de la cámara optimizada Vuelo inestable Sensor pequeño Cámara convencional PRECISIÓN FINAL Errores en x GSD 5.2 XY - Average Z - Average 1.7 Z - Max 2 1.1 1 1.3 UAS Trimble UX5 Otro UAS Project GSD: 2.4cm 14 1/07/2015 Calidad de los datos DSM Solución UX5 Otra solución Artificial ‘steps’ son creados en zonas de bajo recubrimiento y pocos tie points 1 UAS Comparison Ejemplos Trimble UAS Aerial Imaging & Trimble Business Center Photogrammetry Module 15 1/07/2015 Corredor – Obra Lineal Trimble UX5: Las Palmas Gran Canaria. Nube de puntos (2,4cm) 16 1/07/2015 Trimble UX5: Las Palmas Gran Canaria. Nube de puntos (2,4cm) Trimble UX5: Las Palmas Gran Canaria. Nube de puntos (2,4cm) 17 1/07/2015 Trimble UX5: Las Palmas Gran Canaria. Nube de puntos (2,4cm) Trimble UX5: Las Palmas Gran Canaria. Nube de puntos (2,4cm) 18 1/07/2015 Trimble UX5: Las Palmas Gran Canaria. Ortofoto 2,4cm Trimble UX5: Las Palmas Gran Canaria. Ortofoto 2,4cm 19 1/07/2015 Trimble UX5: Las Palmas Gran Canaria. Ortofoto 2,4cm Trimble UX5: Las Palmas Gran Canaria. Ortofoto 2,4cm 20 1/07/2015 Trimble UX5: Las Palmas Gran Canaria. Ortofoto 2,4cm Industrial Park, Denmark 139 Images 100 m Flight Height 3.3 GSD 300 x 600 m 21 1/07/2015 Industrial Park, Denmark 139 Images 100 m Flight Height 3.3 GSD 300 x 600 m Landfill, Colorado 588 Images 175 m Flight Height 6 cm GSD 1.2 km2 22 1/07/2015 Landfill, Colorado 588 Images 175 m Flight Height 6 cm GSD 1.2 km2 Landfill, Colorado 588 Images 175 m Flight Height 6 cm GSD 1.2 km2 23 1/07/2015 Antártida 2014 Base Antartica Española Juan Carlos I 410 m Alt. Vuelo Antártida 2014 24 1/07/2015 25 1/07/2015 1ª Zona Crítica 26 1/07/2015 1er Corte de la Carretera Central Colapso del cauce Votadero 27 1/07/2015 Corte de la calle, daños en el Badén y acumulación de roca y lodo Corte de la carretera Central por acumulación de roca y lodo Cisterna con Agua potable Volquete Pala Cargadora RPAS/UAV: Análisis de los factores que influyen en la calidad métrica de los resultados. Rubén Burón GEOTRONICS 28


© Copyright 2026