
Elasticidad 5.1 Bases Atómicas del Comportamiento Elástico 5.1.1
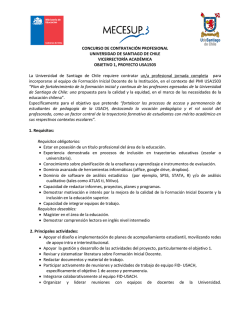
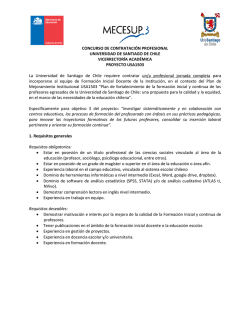
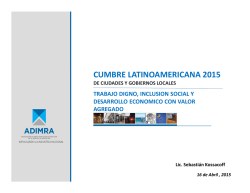
Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Elasticidad 5.1 Bases Atómicas del Comportamiento Elástico 5.1.1 Energía y Fuerza de Enlace La Energía Potencial V de un par de átomos puede expresarse como una función de la distancia de separación entre ellos, r: V A B rn rm A, B son constantes de proporcionalidad para atracción y repulsión. m, n son exponentes que determinan la variación apropiada de V con r. La fuerza de atracción y repulsión que existe entre dos átomos se obtiene de F F Por tanto: V r nA mB r n 1 r m1 Redefiniendo constantes: nA a n 1 N F mB b m 1 M a b M N r r Fuerza Energía Potencial Repulsión V B rm r0 V A B rn rm V Atracción distancia interatómica F Repulsión distancia interatómica r0 F A rn b rM a b rN rM Mínimo Atracción Figura 1. Diagramas de energía potencial y fuerza de interacción frente a la distancia interatómica. Departamento de Ingeniería Metalúrgica – USACH. 5-1 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad La separación de equilibrio entre dos átomos r0, está dada por el valor de r que corresponde al mínimo de energía potencial. La fuerza neta es cero para r = r0 y un desplazamiento en cualquier dirección provocará la acción de fuerzas que restauran el equilibrio. Por lo tanto los átomos en una red cristalina tienden a estar arreglados en un patrón definido, con respecto a sus vecinos. Las deformaciones macroscópicas elásticas son el resultado de un cambio en el espaciado interatómico. Por lo tanto, las deformaciones se pueden expresar como: r r0 r0 2V F E 2 r r r0 r r r0 F a rN Fuerza F a b M N r r r r0 dF dr Figura 2. Diagrama de fuerza frente a distancia interatómica. Ind. 5-2 Recordar que F kr y E Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad V r0 r F Rep ulsión r V 0 r Atracción Figura 3. Diagramas de energía potencial y fuerza de interacción frente a la distancia interatómica. Observaciones. De los análisis anteriores se desprende que: a) F es cero a la distancia de separación r0 b) Si los átomos son alejados o acercados una distancia r r0 , aparece una fuerza que se opone a este cambio en la distancia. c) La fuerza es aproximadamente proporcional a r - r0 si r - r0 es pequeño, tanto en tensión como en compresión. d) La rigidez (stiffness) del enlace es S F 2V 2 r r e) Cuando la perturbación es pequeña, S es constante e igual a Departamento de Ingeniería Metalúrgica – USACH. 5-3 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad 2V S 0 2 r r r0 De esto se deduce que el enlace se comporta de manera elástica – lineal. Esto significa que la fuerza entre pares de átomos, separados una distancia r es F S 0 r r0 r0 F F r Figura 4. Esquema de las fuerzas de interacción entre dos átomos. Dado un sólido con un número muy grande de pares de átomos por plano la fuerza por unidad de área será: NS0 r r0 N: Nº de enlaces/área = 1 r02 r02 : área promedio por átomo Si r-r0 se divide por r0 n S0 se calcula a partir de r r0 r0 S0 n r0 E S0 r0 2V r 2 La curva de esfuerzo versus deformación en compresión es la extensión de la curva a tracción. 5-4 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Zona Elástica Zona Elástica Figura 5. Diagrama - para un material en general. 5.1.2 Propiedades que dependen del enlace a) La fuerza del enlace (temperatura de fusión) es proporcional a la profundidad del pozo de potencial. b) El coeficiente de expansión térmica está relacionado con la asimetría de la curva de energía potencial versus distancia interactiva. c) El módulo de Young, es inversamente proporcional al radio de curvatura del mínimo de la curva de energía potencial versus distancia interatómica. Ejercicio: En los siguiente ejemplos ordenar los materiales por punto de fusión, coeficiente de dilatación lineal y módulo de Young. V V r r V V r Departamento de Ingeniería Metalúrgica – USACH. Figura 6. Diversos casos de curva de energía potencial versus difracción interatómica. r 5-5 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Tabla 1. Propiedades de diversos materiales. Elemento Coeficiente de dilatación lineal (1/° C) Temperatura de fusión(°C) Módulo de Young (GPa) Pb 29,3X10-6 327,4 14 Zn 39,7X10-6 419,5 43 Mg 26,1X10-6 650 41 Al 23,6X10-6 660 69 Ag 19,6X10-6 960,8 76 Cu 16,4X10-6 1083 124 Fe 12,2X10-6 1536,5 196 Cr 6,2X10-6 1875 289 W 4,6X10-6 3410 406 5.2 Introducción a la teoría de la elasticidad En la teoría elástica existen dos requerimientos: i) La teoría debe predecir la conducta de los materiales bajo la acción de las fuerzas aplicadas. ii) La teoría debe ser simple de tal manera que la matemática pueda ser aplicada en un amplio rango de problemas para permitir la solución de las ecuaciones planteadas. Para cada tipo de esfuerzo existe una deformación correspondiente. La propiedad que le permite a un cuerpo recuperar su forma inicial, al dejar de actuar la carga, se denomina ELASTICIDAD. Un cuerpo es perfectamente elástico si recupera completamente su forma inicial. 5.3 Supuestos de la teoría de la elasticidad En la teoría de la elasticidad se asume que el material es: i) Perfectamente elástico ii) Continuo iii) Homogéneo (las propiedades son las mismas en todos los puntos) iv) Isotrópico (todas las propiedades son iguales en todas las direcciones alrededor de un punto dado). 5-6 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad El material, desde el punto de vista atómico dista mucho de cumplir estas condiciones Ej. Materiales Anisótropos Laminados Texturas 5.4 Formulación tensorial de la ley de Hooke C La ley de Hooke se puede generalizar como Esto debe interpretarse como una consecuencia de la aseveración siguiente: extensión es proporcional a la fuerza” “La En notación de subíndice, se puede escribir: ij Cijkl kl Cijkl : Es un tensor de cuarto orden y representa una constante elástica (34 = 81 componentes) Dado que i) El tensor esfuerzo es simétrico ij ji Cijkl C jikl 6·3·3 = 54 componentes. ii) El tensor deformación es simétrico kl lk 36 componentes iii) Aplicando el teorema de reciprocidad. ij kl kl Cijkl Cklij 21 componentes. ij Indicación: Un tensor de orden 2 y dimensión n posee n2 elementos. Al ser simétrico n( n 1) el número de componentes es 2 iv) Planos de simetría. x C11 C12 y C12 C22 . z yz . . xz C . xy 16 . . . . . . C16 x y z yz xz C66 xy Al existir un plano de simetría xy C14 = C15 = C24 = C25 = C16 = C56 = 0 Departamento de Ingeniería Metalúrgica – USACH. 5-7 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Al existir un plano de simetría yz C46 = C26 = C34 = C35 = C36 = C45 = 0 Un tercer plano de simetría no agrega nada nuevo por tanto, con dos o tres simetrías, se tiene 0 0 C11 C12 C13 0 0 0 C12 C 22 C 23 0 C C 23 C 33 0 0 0 13 0 0 C 44 0 0 0 0 0 0 0 C55 0 0 0 0 0 0 C 66 9 Ctes. Esto quiere decir que para materiales ortótropos (3 planos de simetría), Cijkl se reduce a nueve constantes. v) Isotropía: Mismo comportamiento en todas las direcciones La base del comportamiento isotrópico es que al rotar el sólido, deben preservarse las propiedades. En la figura 7 se muestran tres giros posibles que pueden imponerse al sólido. y I y y x' y' II y' x y' z x x' z z z' III Figura 7. Giros para un material isótropo. CASO I: Giro respecto del eje x 1 0 0 Matriz de Transformación a 0 0 1 0 1 0 5-8 Departamento de Ingeniería Metalúrgica – USACH x Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Nota: Cada elemento de la matriz de transformación aij cosx' i , x j en que la (’) se usa para denotar el nuevo eje. por ejemplo corresponde a11 cosx' , x 1 a13 cosx' , z 0 a32 cosz' , y 1 x xy xz ij xy y yz xz yz z x 'ij a ij a xz xy xz z yz xy yz y x 'ij a ij a T xz xy xz z yz xy yz y T x C11 C12 C13 0 y C12 C 22 C 23 0 C C 23 C33 0 z 13 yz 0 0 0 C 44 0 0 0 xz 0 0 0 0 xy 0 0 x 0 y 0 z 0 yz 0 xz C 66 xy (1) 0 0 x x C11 C12 C13 0 0 0 z z C12 C22 C23 0 C C23 C33 0 0 0 y y 13 0 0 C44 0 0 yz yz 0 0 0 0 0 C55 0 xy xy 0 0 0 0 0 C66 xz xz (2) de (1) x C11 x C12 y C13 z 0 0 0 0 C55 0 de (2) (*) x C11 x C12 z C13 y (**) de (*) y (**) se tiene C12 = C13 Departamento de Ingeniería Metalúrgica – USACH. 5-9 a Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad y C12 x C22 y C23 z (***) z C13 x C23 y C33 z z C12 x C22 z C23 y (****) y C13 x C23 z C33 y (***) con C22 C33 yz C44 yz yz C44 yz xz C55 xz xy C55 xy xy C66 xy xz C66 xz C55 C66 CASO II: Giro respecto del eje z 0 1 0 Matriz de transformación a 1 0 0 0 0 1 C11 C 22 C13 C 23 C 44 C55 La matriz de coeficientes queda 0 0 A C11 C12 C12 0 0 0 B C12 C11 C12 0 C C12 C11 0 0 0 B 12 0 0 C 44 0 0 0 0 0 0 0 0 C 44 0 0 0 0 0 0 0 C 44 0 0 A B 0 0 0 B A 0 0 0 0 0 C 0 0 0 0 0 C 0 0 0 0 0 C B B 0 0 CASO III. Giro con respecto al eje z en un ángulo cualquiera a cos sen cos sen sen x xy cos cos xy y sen ' xy y x 5 - 10 sen cos sen ' x ' xy cos ' xy ' y sen 2 xy cos 2 2 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Además, al aplicar la matriz de coeficientes xy C xy x A x B y z y A y B x z ' xy B A x A B y sen22 C Además ' xy xy cos 2 C ' xy ' xy C ' xy pero ' xy y x B A x y sen2 xy cos 2 2 sen 2 sen 2 C xy cos 2 C y x C xy cos 2 2 2 C A B Esto significa que al haber una relación entre C, A, y B, el número de constantes independientes es únicamente dos. 5.5 Constantes de Lamé , De acuerdo a lo deducido anteriormente, las dos constantes independientes pueden ser y , las que se denominan constantes de Lamé. Por lo tanto, se puede definir: C 2 B A 2 x 2 x y z xy 2 xy z x y 2 z xz 2 xz yz 2 yz y x 2 y z O bien, escrito en forma indicial: ij kk ij 2 ij Departamento de Ingeniería Metalúrgica – USACH. 5 - 11 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad 5.6 Relación entre los coeficientes elásticos y los valores obtenidos experimentalmente En tracción, se puede plantear x E x y x en que es el coeficiente de Poisson z x A partir de la última ecuación de la sección anterior, se puede plantear que: ij Si i = j, se tiene con lo cual kk Por tanto ij kk 1 ij kk ij 2 2 1 kk ·3 kk 2 2 kk 2 1 3 2 kk 1 ij ij 2 2 2 1 3 2 Finalmente : ij 1 ij kk ij 2 2 2 3 En el caso de un ensayo de tracción y z 0 i jx por lo que x 1 x x 2 2 2 3 x 1 2 3 1 x x 2 2 3 E E 5 - 12 2 3 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Lo cual de una relación entre las constantes de Lamé y el módulo de elasticidad y z 0 Dado que (tracción uniaxial) y x 2 2 3 z x 2 2 3 x 2 x 2 2 3 Así, el módulo de Poisson, se puede plantear como: y x 2 2( ) lo cual entrega una relación entre los constantes de Lamé y el módulo de Poisson. En un ensayo de cortadura simple, se cumple que: xy 0 ya que ij xy G xy xy xy 2 xy 2G xy 1 ij kk ij 2 2 2 3 xy xy 2 xy 2 entonces xy G y dado que xy 2G xy que es la relación entre el módulo de corte y la constante de Lamé 5.7 Relación entre E y v y las constantes de Lamé A partir de las relaciones anteriores se puede demostrar que E 1 1 2 E 21 G E 21 Esta última ecuación permite demostrar que G<E. Departamento de Ingeniería Metalúrgica – USACH. 5 - 13 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad En notación indicial, se puede escribir: ij kk ij 2 ij ij E E kk ij ij 1 1 2 1 ij 1 ij kk ij E E Finalmente ij en función de E y 1 x y z E 1 y y x z E 1 z z x y E x xz yz xy xz G yz G xy G Estas son las relaciones de Hooke más aplicadas, conviene recordarlas 5.8 Módulo compresibilidad El módulo de compresibilidad se define como K m v V Corresponde al cambio de volumen en un material al aplicársele una carga. V 0 Si K V K 0 m 2 1 3 2 3 m K m 2 3 m 3 5.9 Energía de deformación Sea un sólido que en t 0 está sin deformar. Considérese el sólido en t dt u Si u es el desplazamiento u dt es el desplazamiento final. t Considerar dW : Incremento de trabajo, dW puede deberse a fuerzas de superficie o fuerzas de volumen. 5 - 14 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad ui ui dt ui ui dt t ij i dA ui dt xi dV ui dt trabajo desplaz. dF dWu dWu ij j dA u i xi dV u i dt dW ij j u i dA xi u i dV dt A V ij , j xi 0 Teorema de Gauss F F d S d F i S dV xii dV dW ij ui , j dV ij , j ui dV dt V ij ui , j dV ijij dV V V dW ijij dV dt V Densidad de energía de deformación dU 0 ijij dU 0 ij d ij dt dU 0 ij d ij 2 ij 3 m ij d ij 2 ij d ij 3 m ij d ij 2 ij d ij 9 m d m ij t dU 0 0 0 U 0 ij ij 9 2 m2 Departamento de Ingeniería Metalúrgica – USACH. 5 - 15 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad ij 3 m 9 1 U 0 ij ij m2 ij ij 2 2 2 2 2 3 1 U 0 ij ij 2 5 - 16 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Ejercicios resueltos 1. Se considera un prisma regular cuyo material tiene un módulo de elasticidad E 2,8 105 kg / cm 2 y coeficiente de Poisson v = 0,1. La longitud del lado de la sección recta es a = 20 cm. En ambas bases del prisma se colocan dos placas perfectamente lisas y rígidas de peso despreciable, unidas entre sí mediante cuatro cables de sección 1 cm2 y módulo de elasticidad E1 2 10 6 kg / cm 2 de longitudes iguales a la altura del prisma l = 1 m, simétricamente dispuestos como se indica en la figura. Sobre las caras laterales opuestas del prisma se aplica una fuerza de compresión uniforme p 750 kg / cm 2 . p a a a) Calcular la tensión en los cables. El alargamiento en la dirección del eje z provocado por la compresión p sobre las caras laterales somete a tracción a los cables que, a su vez, por el principio de acción y reacción, comprime al prisma en la dirección del eje z con una fuerza de valor 4 a1 . Las tensiones normales en las caras del prisma son: Departamento de Ingeniería Metalúrgica – USACH. 5 - 17 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad nx 0 ny p a 2 nz 4 a1 y Fprisma = Fcable nz 4 a1 (1) a2 Al ser las placas perfectamente rígidas, son iguales los alargamientos unitarios de los cables y del prisma en la dirección del eje z. El alargamiento unitario en los cables es (dirección z) E1 (2) Mientras que el correspondiente a la dirección longitudinal del prisma, reemplazando (1,a,b,c) en (3) queda. z 1 1 4 a nz nx ny 2 1 p (3) E E a Igualando ambas expresiones (2) = (3) z E 1 4 a1 2 4 p E a Se obtiene la expresión de la tensión en los cables. p a 2 E1 a 2 E 4 E1 a1 Sustituyendo valores se tiene: 0,1 750 20 2 2 10 6 kg kg 2 500 2 5 2 6 2,8 10 20 4 2 10 1 cm cm b) Calcular las tensiones principales en el prisma. Las direcciones principales en todos los puntos del prisma coinciden con las direcciones de los ejes del sistema de referencia adoptado. Por lo tanto, los valores de las tensiones principales son: 5 - 18 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad nx 0 ny p nz 4 p E1 a E 4 E1 r1 2 Sustituyendo valores: nx 0 ny 750 kg cm 2 4 0,1 750 2 10 6 1 kg kg 2 5 2 5 2 6 2,8 10 10 4 2 10 1 cm cm Ordenando de mayor a menor, se tiene: 1 0 2 5 kg cm 2 3 750 kg cm 2 c) Calcular la variación de volumen experimentada por el prisma. La deformación cúbica unitaria es: e x y z 1 nx ny nz 1 2 1 0,27505 5 2,157 10 3 E 2,8 10 La variación de volumen experimentada por el prisma es: V eV 86,28cm 3 2. Dos paralelepípedos A y B de distinto material y de las mismas dimensiones a b c, se colocan a uno y otro lado de una placa rígida y lisa adosados a ella por sus caras a c, de tal forma que en sus ejes de simetría perpendiculares a dichas caras sean coincidentes (ver figura). Ambos paralelepípedos, junto con la placa se introducen en una ranura de anchura igual a dos veces la longitud de la arista b más el espesor de la placa. Las paredes de la ranura son planas, rígidas y perfectamente lisas. Los paralelepípedos A y B se calientan, experimentando incrementos de temperatura T1 y T2 respectivamente. Conociendo los módulos de elasticidad E1 y E2, los coeficientes de Departamento de Ingeniería Metalúrgica – USACH. 5 - 19 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad dilatación lineal 1 y 2 y los coeficientes de Poisson v1 y v2 de los bloques A y B respectivamente, se pide: a) Las tensiones principales en ambos bloques b) Las variaciones de longitud de las aristas de los mismos c) Calcular la variación de volumen de los dos bloques si ambos tienen las dimensiones 20 30 20 cm y cada uno de ellos las siguientes características: Cuerpo A (acero) Cuerpo B (aluminio) 0,117 104 º C 1 0,234 104 º C 1 E 2 106 Kgf / cm2 0,69 106 Kgf / cm2 v 0,25 0,23 T 60 50 z a T1 a b c A T2 b c B y x Ayuda: para resolver el problema se deben utilizar las leyes de Hooke generalizadas, teniendo en cuenta las dilataciones térmicas, es decir, debe sumar "T " a las deformaciones principales. 5 - 20 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad a) Los incrementos de temperatura producen dilataciones en todas las direcciones. El alargamiento en las direcciones del eje y está impedido para ambos bloques, lo cual crea tensiones ny en los mismos. Ecuaciones a utilizar: x 1 nx ny nz T E y 1 ny nx nz T E z 1 nz nx ny T E xy xy G ; xz xz G ; yz yz G Distinguiremos con el superíndice 1 a las componentes de las matrices de tensiones y de deformación del cuerpo A, y con el superíndice 2 las correspondientes al cuerpo B. Como la deformación sólo está impedida en la dirección del eje y, tenemos: 1 2 1 2 1 2 ny 0 ; ny 0 ; nx nx nz nz 0 1xy xy2 1xz xz2 1yz yz2 0 Además, las figuras imponen las siguientes condiciones 1 2 ny ny 1y y2 0 De las ecuaciones de Hooke, se deduce: 1y 1 1 ny 1T1 E1 y2 1 2 ny 2T2 E2 Teniendo en cuenta la relación anterior, se tiene: 1y y2 0 1 2 ny ny 1 1 1 ny 1T1 ny2 2T2 E2 E1 1T1 2T2 E1 E2 E1E2 Departamento de Ingeniería Metalúrgica – USACH. 5 - 21 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad 1 2 ny 960 ny Cuerpo A Cuerpo B 1 2 0 1 2 0 3 960 kgf cm 2 3 960 kgf cm 2 b) Las variaciones de longitud de las aristas de los bloques vienen dadas por: Cuerpo A Cuerpo B a a 1x a a x2 b b 1x b b x2 c c 1x c c x2 Cuerpo A 1x 1 1 ny 1T1 8,22 10 4 E1 1y 1 ny 1T1 2,22 10 4 E1 1z 1 1 ny 1T1 8,22 10 4 E1 Cuerpo B x2 1 2 ny 2T2 1,49 103 E2 y2 1 ny 2T2 2,22 10 4 E2 z2 1 2 ny 2T2 1,49 103 E2 5 - 22 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Cuerpo A Cuerpo B a 8,22 104 a a 1,49 103 a b 2,22 104 b b 2,22 104 b c 8,22 104 c c 1,49 103 c c) Calcular la variación de volumen si ambos tienen las mismas dimensiones. 20 30 20 cm Volumen del Cuerpo A inicial = Volumen del Cuerpo B inicial V 12000 cm3 Cuerpo A a 20 a 0,016 a* 20,016 b 30 b 0,007 b* 30,007 VA* 12022 cm3 c 20 c 0,016 c* 20,016 VA 22 cm3 Cuerpo B a 20 a 0,030 b 30 b 0,007 c 20 c 0,030 a* 20,03 b* 29,993 VB * 12033,2 cm3 c* 20,03 VB 33,2 cm3 Demostrar que las tensiones hidrostáticas no cambian el lugar de fluencia. Recordar: dU 0 ij d ij Densidad de energía de deformación. Ahora Trabajo Plástico Total Departamento de Ingeniería Metalúrgica – USACH. 5 - 23 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad dWP ij d ijP ij ij ' ij h dWP ( ij ' ij h )d ijP dWP ij ' d ijP ij h d ijP dWP ij ' d ijP h ij d ijP 1 i j 0 i j ij dWP ij ' d ijP h d iiP donde: d ijP Deformación Plástica d iiP 0 , ya que la deformación plástica ocurre sin cambio de volumen. dWP ij ' d ijP ij d ijP La tensión hidrostática no produce trabajo plástico. En el interior de un cilindro de acero, absolutamente rígido, de radio interno r = 0,1 m, se introduce un cilindro de caucho del mismo radio (coeficiente de Poisson 0.4), según se indica en la figura. Mediante una fuerza de 2 toneladas que actúa sobre un pistón de peso y rozamiento despreciables colocado sobre el caucho, se comprime éste. Calcular la presión entre la goma y el acero. 3.- F 5 - 24 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Solución nz Eje Z F A 2 El área donde actúa la fuerza es ·r nz 2000 Kg F Kg · f 6.37 2 2 2 ·r ·(10) cm cm 2 x y 0 nx P Eje X ny P Eje Y Luego x 1 nx ny nz 0 E P nz 6.37 Reemplazando los valores nx P , ny , tenemos que: P 0.4P 6.37 0 P 0.4 P 2.548 0 0.6 P 2.548 P 4.25 Kg · f cm 2 4.- Un cubo metálico que tiene una longitud de arista a = 25 cm se sumerge en el mar a una profundidad z = 800 m. Conociendo el módulo de elasticidad E 2,1 10 6 Kgf / cm 2 , el coeficiente de Poisson v y el valor de la densidad del agua de mar 1025 Kg/m3, se pide: a) La representación del estado de esfuerzos usando el círculo de Mohr. a = 25 cm. z = 800 m. E 2,1 10 6 Kgf / cm 2 , v = 0,3 La presión hidrostática es p gz 1025 Kg / m3 9,81 m / s 2 800 m Departamento de Ingeniería Metalúrgica – USACH. 5 - 25 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Kgm 2 Kg 8,0442 106 8,0442 106 s 2 2 ms m Kgf Kgf 82 2 m cm 2 820.000 El estado tensional del cubo a partir del círculo de Mohr queda: 82 82 Kgf cm 2 Dado que es sólo un punto. b) Direcciones principales. Cualquier dirección es principal. c) La variación que experimenta el cubo sumergido. 1 1 v 2 3 , pero 1 2 3 E 1 1 v 2 1 2v p 1 2v E E E 82 1 2 0,3 1,56 10 5 2,1 10 6 La deformación unitaria es 1 2 3 3 V V 3V V V 3 1,56 10 5 253 0,73 cm 3 5 - 26 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad 5.- Un bloque de aluminio es comprimido entre paredes de acero perfectamente rígidas y lisas (= 0.3; E=6000 Kg/mm2). Determinar: a) Las dimensiones del agujero si las presiones laterales no deben exceder de 2 kg/mm2 b) El cambio de volumen del bloque. c) Las deformaciones normal y cizallante en un plano cuya normal es . nˆ 1 i 2 j 2k 3 z P=12 Ton 50 mm y y 50 mm 30 mm x a) z 12000 8kP / mm 2 50 * 30 x y 2kP / mm2 x 2 0,3 * (2 8) 1 x 6000 6000 30 Departamento de Ingeniería Metalúrgica – USACH. 5 - 27 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Luego, y x 0,005mm lx 30,005mm 2 0,3 * (2 8) 1 y 6000 6000 50 y 0,0083mm ly 50,0083mm b) Se tiene 1 6000 x y z 8 0,3 * (2 2) 6,8 6000 6000 por lo tanto V V 1 4,8 2 x z (2 6,8) V0 6000 6000 4,8 (50 * 30 * 50) 60mm3 6000 c) 0 1 0 1 1 ij 0 ; nˆ (iˆ 2 ˆj 2kˆ) 0 1 6000 3 0 0 6,8 0 1 1 0 1 1 1 1 0 * 2 0 1 2 6000 3 18000 13,6 0 0 6,8 2 2 1 188,96 (iˆ 2 ˆj 13,6kˆ); 18000 (18000) 2 n nˆ 1 1 (iˆ 2 ˆj 13,6kˆ) * (iˆ 2 ˆj 2kˆ) 18000 3 n 4,111*10 4 2 5 - 28 ; n 2 1,69 *10 7 2 n 2 6,438 *10 4 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad 6.- El esquema muestra una configuración en la cual un material A se comprime con 20 MPa. Este material está inserto dentro de una matriz hecha de un material B, que también puede deformarse. A su vez, todo el conjunto está inserto dentro de un marco de paredes infinitamente rígidas. ¿Cuál es el módulo de elasticidad que debe tener el material B para que el material A no se deforme en la dirección vertical? y A x 20 MPa z B Pared infitamente rígida A Departamento de Ingeniería Metalúrgica – USACH. Pared infitamente rígida 5 - 29 Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Como las paredes son infinitamente rígidas, entonces la deformación total, por el eje X, será cero, por lo que se tiene que: total 0 X A B X X 1 1 x A A YA Z A X B B YB Z B EA EB EB A A x A Y Z A (*1) Pero al no aplicarse ninguna tensión directamente sobre B, entonces Y 0 B E A X B B YB Z B (*2) Como el material A no debe deformase en Y se tiene entonces que: 1 YA A X A Z A 0 EA Y A X Z 0 A A A Pero al no deformarse por Y, entonces YA 0 (*3) Por lo que se tiene que: X Z A (*4) A Ahora analizando el dibujo: Z Z A B X X A B Por lo que se tiene que: 5 - 30 Departamento de Ingeniería Metalúrgica – USACH Comportamiento Mecánico de Sólidos Capítulo V. Elasticidad Z 20MPa A X 20MPa A Z 20MPa (*5) B X 20MPa B Ahora reemplazando (*2),(*3),(*4) y (*5) en (*1) se tiene que: EB E A Departamento de Ingeniería Metalúrgica – USACH. 1 B 1 A 5 - 31


© Copyright 2026