Es
docs
Explorar
Iniciar sesión
Crear una nueva cuenta
Download
Report
Art and Diseño
Learning a Case-Based Model of Inverse Trust
Adapting Autonomous Behavior Using an Inverse Trust Estimation
Case-Based Behavior Adaptation Using an Inverse Trust Metric
Competition Rules - t4 - Technology Subjects Support Service
ai.mit.edu - Personal Robots Group
Regulation and Entrainment in Human-Robot Interaction
Sensor Fusion based on Multi-Self-Organizing
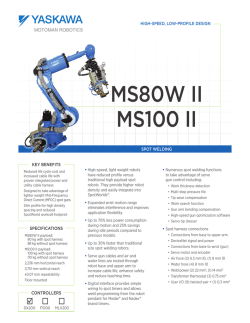
MS80W II MS100 II
1 MB
© Copyright 2026
Acerca de EsDocs
DMCA / GDPR
Alertar