
INSTITUTO POLITÉCNICO NACIONAL
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA. UNIDAD PROFESIONAL AZCAPOTZALCO. “INTEGRACIÓN DE UN ROBOT EN UNA LÍNEA DE PRODUCCIÓN AUTOMOTRIZ APLICANDO SOLDADURA MIG.” TESIS PARA OBTENER EL TITULO DE: INGENIERO EN ROBÓTICA INDUSTRIAL. PRESENTA: LUIS OMAR GUTIERREZ MIRANDA México D.F. 2011. 1 AGRADECIMIENTOS: A DIOS: Por guiarme en un buen camino, ayudándome a tomar buenas decisiones y poder recuperarme de las adversidades que se me han presentado durante este tiempo. A MIS PADRES: Jose Luis Gutiérrez Almaguer, Yolanda Miranda Arredondo. Que en todo momento y sin esperar nada a cambio me brindaron todo su apoyo incondicionalmente, siempre impulsándome a seguir adelante para terminar los proyectos que he comenzado. A MIS HERMANOS: Iván Gutiérrez Miranda, Sandra Gutiérrez Miranda por haberme brindado su apoyo cuando más lo necesitaba. A MI ESPOSA: Karina Silva Palacios, Por darme su apoyo para poder terminar mi carrera profesional A MI ESCUELA: E.S.I.M.E. U.P.A. Por haberme brindado la oportunidad de realizar mi formación académica, esperando no defraudarla. 2 INTRODUCCION. El ciudadano industrializado que vivía a caballo en el siglo XX y el XXI se ha visto en la necesidad de aprender en escasos 25 años, el significado de un buen numero de términos marcados por su alto contenido tecnológico. De ellos sin duda el más relevante ha sido el de la computadora (ordenador). Este, esta introducido hoy en día en su versión personal en multitud de hogares y el ciudadano medio va conociendo en creciente proporción, además de su existencia, su modo de uso y buena parte de sus posibilidades. Pero dejando de lado esta verdadera revolución social, existen otros conceptos procedentes del desarrollo tecnológico que han superado las barreras impuestas por las industrias y centros de investigación, incorporándose en cierta medida al lenguaje coloquial. Es llamativo como entre estas destaca el concepto de robot. Aun sin tener datos reales, no parece ser muy aventurado suponer que de preguntar al ciudadano medio sobre que es un robot industrial, este demostraría tener, cuando menos, una idea aproximada de su aspecto y utilidad. Esta familiaridad con la que nuestra sociedad trata al robot es más llamativa cuando se compara con el amplio desconocimiento que se puede tener de otras maquinas o aparatos, aun siendo de mayor antigüedad o utilidad, como por ejemplo seria el osciloscopio o los parientes cercanos de los robots: las maquinas de control numérico. El mito ha rodeado y rodea al robot, a pesar de las más de 600,000 unidades instaladas en el mundo a principios de 1995. Sus orígenes de ficción, su controvertido impacto social, su aparente autonomía y notorio contenido tecnológico originan que, a pesar de su popularidad, siga siendo admirado y en ocasiones temido. La tesis que a continuación presento, reúne los conocimientos necesarios para conocer a fondo que es, como funciona y para qué sirve un robot. Tras la lectura esperamos desmentir al robot, quedando a la altura de cualquier otra máquina compleja, como otras muchas que nos rodean (automóvil, televisión, etc.). Tras su estudio, el robot será la síntesis de un importante bagaje de conocimientos científicotécnicos, adecuadamente conjuntados para dar como resultado un dispositivo destinado a mejorar la producción en el ensamblaje de partes automotrices utilizando soldadura MIG. 3 INDICE. MARCO LEGAL. JUSTIFICACIÓN. INTRODUCCIÓN. CAPITULO I. ANTECEDENTES. 1 1.1. ANTECEDENTES HISTÓRICOS. 1 1.2. ORIGEN Y DESARROLLO DE LA ROBÓTICA. 3 1.3.1 CLASIFICACIÓN DEL ROBOT INDUSTRIAL. 6 1.3.2. Estructura mecánica de un robot. 6 1.3.3. Transmisiones y reductores. 7 1.4.1. Actuadores. 8 1.4.2 Sensores. 13 1.5.1 Elementos terminales. 16 CAPITULO II. MARCO TEORICO 17 2.1. CORDONES DE SOLDADURA. 17 2.1.2 La penetración de un cordón de soldadura. 19 2.2. Sistema de soldadura MIG, MAG. 19 2.3. PARAMETROS DE SOLDADURA. 20 2.3.1. Mezcla para soldadura mag. 21 2.3.2 Forma de los cordones. 22 2.3.3 Definición de los cordones de soldadura. 22 4 2.4 Corrección de robot por coordenadas. 24 2.5 La transferencia en modo spray. 24 2.6 Soldadura regulada por escalones. 25 CAPITULO III. ELEMENTOS INTEGRADORES DEL PROCESO. 26 3.1 DISPOSITIVOS. 26 3.2.1 Cilindros neumáticos (clamps). 26 3.2.2 Electroválvulas. 27 3.2.3 Conexiones multicontacto. 3.3. TABLERO DE CONTROL. 27 28 3.3.1. Selección de entradas y salidas. 28 3.3.2 El procesador. 28 3.3.3 El dispositivo de programación. 29 3.4. SOFTWARE RSLOGIX 500™ (SOFTWARE DE PROGRAMACIÓN). 29 3.5 Limpiador de boquillas. 29 3.6 MAQUINA DE SOLDADURA MILLER. 30 3.7 ALIMENTADOR DE MICROALAMBRE. 31 CAPITULO IV INTEGRACION DEL ROBOT EN LA LINEA DE PRODUCCION. 32 4.1 ROBOT SSA2000. 32 4.2 MASTERIZACION DEL ROBOT. 32 4.3 CENTRO DE HERRAMIENTA (TCP). 33 4.4 PROGRAMACION DEL ROBOT. 34 5 4.4.1 Movimientos del robot. 34 4.5. CABLEADO DE DISPOSITIVOS Y PLC AL ROBOT. 35 4.6. PROGRAMACION DE MOVIMIENTOS DEL ROBOT. 36 4.7 PROGRAMAS DEL ROBOT. 38 4.7.1 Programa mesa 1. 39 4.7.2 Programa mesa 2. 40 4.7.3 Programa mesa 3. 41 4.7.4 Programa mesa 4. 43 4.7.5 Programa mesa 5. 45 4.8 PROGRAMACION DEL CONTROLADOR LOGICO PROGRAMABLE (PLC). 4.8.1 Instrucciones utilizadas en el programa. 48 72 CONCLUSIONES. 75 BIBLIOGRAFIA. 76 6 MARCO LEGAL. A través del tiempo y con la renovación de la tecnología es necesario implementar automatismos que nos ayuden a simplificar un poco el trabajo, desde luego tomando en cuenta que lo primordial en este tipo de ensamblaje de partes automotrices, utilizando soldadura mig. Es elaborar piezas con calidad y que cumplan con los más estrictas normas de seguridad en cuanto a la calidad del punto de soldadura se refiere. Ya que la seguridad de las personas es lo primordial, es por ello que como empresa ensambladora de partes automotrices debemos seguir ciertos lineamientos que las plantas ensambladoras como Volkswagen, Ford Motor Company y Daimler Chrysler nos proponen para poder ser proveedora de partes ensambladas y estampadas. Así también debemos cumplir con reglas de calidad internas, tanto en la automatización como en el ensamblaje asistido por robots industriales. JUSTIFICACIÓN. La realización de este tema es por la gran importancia que tiene y seguirá teniendo la robótica en todas sus diferentes áreas y es por ello que en esta tesis es basada mi experiencia profesional, ponemos al descubierto cuán grande es el campo de acción de la robótica industrial en este caso en el ensamblaje de componentes utilizando soldadura mig. El ingeniero en robótica industrial tiene una amplia relación y conocimiento en la diferentes áreas de la industria y en esta se debe de llevar a cabo un control del proceso que se adecue a las necesidades de producción de la planta logrando calidad y altos estándares de producción, en donde la automatización del proceso juegue el papel más importante. Ejemplo de este proceso es en la industria automotriz en donde el número de autos ensamblados requiere de procesos eficaces y únicamente con la más alta tecnología podríamos lograr un proceso automatizado de ensamblaje con esas características. De aquí el interesen la elaboración del tema además de ser nuestra campo de trabajo. 7 CAPITULO I. ANTECEDENTES 1.1. Antecedentes históricos. A lo largo de la historia el hombre ha sentido la necesidad de construir maquinas y dispositivos capaces de imitar la funcionalidad y los movimientos de los seres vivos. Antiguamente los griegos tenían un término específico para denominar a estas maquinas: autómatas. Durante los siglos XVII y XVIII se crearon ingenios mecánicos que tenían características similares a los de los robots actuales, estos dispositivos mecánicos fueron creados en su mayoría por artesanos del gremio de la relojería. Su misión principal era la de entretener a las gentes de la corte y servir de atracción en las ferias. Jaques Vacauson (1709-1782), autor del primer telar mecánico, construyó varios muñecos animados, entre los que destaca un flautista capaz de tocar varias melodías y un pato (1738) capaz de beber comer y digerir la comida. La palabra Robot fue utilizada por primera vez en el año 1921, cuando el escritor checo Carel Cape (1890-1938) estrena en el teatro nacional de Praga su obra Rossum's Universal (R.U.R.). Su origen es la palabra eslava Rabota (trabajador), que se refiere al trabajo realizado de manera forzada. Los robots de R.U.R. eran maquinas androides fabricadas a partir de la “formula” obtenida por un brillante científico llamado Rosan. Estos robots servían a sus jefes humanos desarrollando todos los trabajos físicos, hasta que finalmente se rebelan contra sus dueños, destruyendo toda la vida humana, a excepción de uno de sus creadores, con la frustrada esperanza que les enseñe a reproducirse. El termino posiblemente hubiera caído en desuso si no hubiera sido por los escritores del género literario de la ciencia ficción, algunos de los cuales retomaron la palabra. Pero sin duda alguna, fue el escritor americano de origen ruso Isaac Asimov (19201992) el máximo impulsor de la palabra robot. En octubre de 1945 publico en la revista Galaxia Science Ficción una historia en la que por primera vez anuncio las Tres leyes de la robótica. 1.- Un robot no puede perjudicar a un ser humano, ni con su inacción permitir que un ser humano sufra daño. 2.- Un robot debe obedecer las órdenes recibidas de un ser humano, excepto si tales órdenes entran en conflicto con la primera ley. 8 3.-Un robot puede proteger su propia existencia mientras tal protección no entre en conflicto con la primera o segunda ley. Se le atribuye a Isaac Asimos (fig. A) la creación del término robotics (robótica) y sin lugar a duda, desde su obra literaria, ha contribuido decisivamente a la divulgación y difusión de la robótica. En la Fig. 1.1. Podemos ver un ROBOT industrial actual. Ejemplo físico del término que nos dejaría como legado el escritor americano de origen ruso. Fig. A. Isaac Asimov, creador del término robótica. Fig. 1.1. Robot Motoman ASS 2000 de 6 GDL utilizado en el proyecto de integración. 9 1.2. ORÍGEN Y DESARROLLO DE LA ROBÓTICA. La primera patente de un dispositivo robótico fue solicitada en marzo de 1945 por el inventor británico C.W. Kenward Dicha patente fue emitida en el Reino Unido en 1957 con el numero 781465. Sin embargo, fue George C. Devol, Ingeniero norteamericano, inventor y autor de varias patentes, el que estableció las bases del robot industrial moderno. En 1954 Devol concibió la idea de un dispositivo de transferencia programada de artículos que se patento en los Estados Unidos en 1961 con el numero 2988237. En 1956 pone esta idea en conocimiento de Joseph F. Engelberger (1925- ), ávido lector de Asimov y director de ingeniería de la división aeroespacial de la empresa Manning Maxwell y Moore en Standford, Conneticut, Juntos, Devol y Engelberger comienzan a trabajar en la utilización industrial de sus maquinas, fundando la Consolidated Controls Corporation, que mas tarde se convierte en Unimation (Universal Automation), e instalando su primer maquina Unimate (1960) similar al de la figura 1.2 en la fábrica de General Motors de Trenton, Nueva Jersey, en una aplicación de fundición por inyección. Fig. 1.2. Robot Unimate 2000. Unos de los primeros modelos comerciales de Unimation. 10 En 1968 J.F. Engelberger visito Japón y poco más tarde se firmaron acuerdos con Kawasaki para la construcción de robots tipo Unimate. El crecimiento de la Robótica en Japón aventajo en breve a los Estados Unidos gracias a Nissan, que formo la primera asociación robótica del mundo, la Asociación de Robótica Industrial de Japón (JIRA) en 1972. Dos años más tarde se formo el Instituto de Robótica de América (RIA), que en 1984 cambio su nombre por el de Asociación de Industrias Robóticas, manteniendo las mismas siglas (RIA). Por su parte Europa tuvo un despertar más tardío. En 1973 la firma sueca ASEA construyo el primer robot con accionamiento totalmente eléctrico, el robot IRb6 (Fig.1.3). En 1980 se fundó la Federación Internacional de Robótica con sede en Estocolmo Suecia. Fig. 1.3. Robot IRb6 de la firma sueca ASEA. La configuración de los primeros robots respondía a las denominadas configuraciones esféricas y antropomórficas, de uso especialmente valido para la manipulación. En 1982 el profesor Makino de la Universidad Yamanashi de Japón, desarrolla en concepto de robot SCARA (Selective Compliance Assembly Robot Arm) que busca con un número reducido de grados de libertad (3 o 4), un coste limitado y una configuración orientada al ensamblado de piezas. La evolución de los robots industriales desde sus primero balbuceos ha sido vertiginosa. 11 En poco más de 30 años las investigaciones y desarrollo sobre la robótica industrial han permitido que los robots tomen posiciones en casi todas las áreas productivas y tipos de industria. Los futuros desarrollos de la robótica apuntan a aumentar su movilidad, destreza y autonomía de sus acciones. La mayor parte de los robots actuales son de base estática, y se utilizan en aplicaciones industriales tales como ensamblado, soldadura, alimentación de maquinas herramientas, etc. Sin embargo, hay otro tipo de aplicaciones que han hecho evolucionar en gran medida tanto la concepción de los robots como su propia morfología. Entre estos robots dedicados a aplicaciones no industriales destacan los robots espaciales (brazos para lanzamiento y recuperación de satélites, vehículos de exploración lunar, robots para la construcción y mantenimiento de Hardware en el espacio);robots para aplicaciones submarinas y subterráneas (exploración submarina, instalación y mantenimiento de cables telefónicos submarinos, limpieza e inspección de tuberías y drenaje subterráneos); robots militares (desactivación de bombas);robots móviles industriales; robot agrícolas(sembrado y cosecha); robots móviles industriales; prótesis para los discapacitados; etc. Un Robot es un manipulador automático servocontrolado, reprogramable, polivalente, capaz de posicionar y orientar piezas, útiles o dispositivos especiales, siguiendo trayectorias variables reprogramables, para la ejecución de tareas variadas. Normalmente tiene la forma de uno o varios brazos terminados en una muñeca. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es el de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su material. Por último, la Federación Internacional de Robótica (IFR) en su informe técnico ISO/TR 83737 (septiembre de 1988) distingue entre robot industrial de manipulación y otros robots. Por robot industrial de manipulación se entiende a una maquina de manipulación automática, reprogramable y multifuncional con tres o más ejes que pueden posicionar y orientar materias, piezas, herramientas o dispositivos especiales para la ejecución de trabajos diversos en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento. En esta definición se debe de entender que la reprogramabilidad y multifunción se consigue sin modificaciones físicas del robot. 12 1.3.1. Clasificación del robot industrial. La IFR distingue entre cuatro tipos de robots: 1. 2. 3. 4. Robot secuencial. Robot de trayectoria controlable. Robot adaptativo. Robot tele manipulado. Un robot está formado por los siguientes elementos: estructura mecánica, transmisiones, sistema de accionamiento, sistema sensorial, sistema de control y elementos terminales. Examinaremos las partes constitutivas de un robot. Primeramente la estructura mecánica, haciendo referencia a los distintos tipos de articulaciones posibles entre dos eslabones consecutivos y a las configuraciones existentes. Seguidamente analizaremos los sistemas de transmisión y reducción necesarios para transmitir a cada una de las articulaciones el movimiento generado por los actuadores, que como elementos con capacidad para desplazar la estructura mecánica, analizaremos a continuación. Los sensores internos son necesarios para el control de los movimientos del robot. Fig. 1.4. Servomotor de un robot. 1.3.2 ESTRUCTURA MECANICA DE UN ROBOT. Mecánicamente, un robot está formado por una serie de elementos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. 13 La constitución física de la mayor parte de los robots industriales guarda cierta similitud con la anatomía del brazo humano, por lo que en ocasiones parece hacer referencia a los distintos elementos que componen el robot, se utilizan términos como cuerpo, brazo, codo y muñeca. El movimiento de cada articulación puede ser de desplazamiento, de giro o de combinación de ambos. Aunque, en la práctica, en los robots solo se emplean la de rotación y la prismática. Cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior se le denomina grado de libertad (GDL). El número de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que la componen. Puesto que, como se ha indicado, las articulaciones empleadas son únicamente las de rotación y prismática con un grado de libertad cada una, el número de GDL del robot suele coincidir con el número de articulaciones de que se compone. 1.3.3 TRANSMISIONES Y REDUCTORES. Las transmisiones son los elementos encargados de transmitir el movimiento de los actuadores hasta las articulaciones. Se incluyen junto con las transmisiones a los reductores, encargados de adaptar el par y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los elementos del robot. Tabla 1.1. Sistemas de transmisión para un robot. Entrada-Salida Denominación Engranaje Correa dentada Circular-Circular Cadena Paralelogramo Cable Ventajas Inconvenientes Holguras Pares altos Ruido Distancia grande Giro limitado Distancia grande Deformabilidad Circular-Lineal Tornillo sin fin Cremallera Poca holgura Holgura media Lineal-Circular Paralelogramo articulado Holgura media Cremallera Rozamiento Rozamiento Control difícil Rozamiento 14 1.4.1. ACTUADORES. Los actuadores tienen por misión generar los movimientos de los elementos del robot según las órdenes dadas por la unidad del control. Los actuadores utilizados en robótica pueden utilizar energía neumática, hidráulica o eléctrica. Cada uno de estos sistemas presenta características diferentes, siendo preciso evaluarlas a la hora de seleccionar el tipo de actuador más conveniente. Las características a considerar son entre otras: Potencia. Precisión. Velocidad. Controlabilidad. Peso y volumen. Actuadores neumáticos; En ellos la fuente de energía es aire a presión entre 5 y 10 bar. Existen dos tipos de actuadores neumáticos. Cilindros neumáticos. Se consigue el desplazamiento de un émbolo encerrado en un cilindro, como consecuencia de la diferencia de presión a ambos lados de aquel. Los cilindros neumáticos pueden ser de simple o doble efecto. En los primeros, el embolo se desplaza en un sentido como resultado del empuje ejercido por el aire a presión, mientras que en el otro sentido se desplaza como consecuencia del efecto de un muelle (que recupera al embolo a su posición de reposo). En los cilindros de doble efecto el aire a presión es el encargado de empujar al embolo en las dos direcciones, al poder ser introducido de forma arbitraria en cualquiera de las dos cámaras. En la fig.1.5 se muestra la estructura mecanica de un cilindro neumatico Fig. 1.5. Esquema de un cilindro neumático. En los motores neumaticos se consigue el movimiento de rotacion de un eje mediante aire a presion. Los dos tipos mas usados son los motores de aletas rotativas y los mortores de pistones axiales. Sobre el rotor excéntrico están dispuestas las aletas de longitud variable. Al entrar aire a presión en uno de los compartimentos formados por dos aletas y la carcasa estas tienden a girar hacia una situación en el que el comportamieto tenga mayor volúmen. 15 Los motores de pistones axiales tienen un eje de giro solidario a un tambor que se ve obligado a girar por las fuerzas que ejercen varios cilindros, que se apoyan sobre un plano inclinado. En las figuras 1.6, 1.7 se muestra el funcionamiento de un motor neumatico. Fig. 1.6. Motor de paletas. Fig. 1.7. Motor de pitones axiales. Otro método común más sencillo de obtener movimientos de rotación a partir de actuadores neumáticos, se basa en el empleo de cilindros cuyo embolo se encuentra acoplado a un sistema de piñón-cremallera. El conjunto forma una unidad compacta que pueden adquirirse en el mercado. En general y debido a la compresibilidad del aire los actuadores neumáticos no consiguen una buena precisión de posicionamiento. Sin embargo, su sencillez y robustez hacen adecuado su uso en aquellos casos en los que sea suficiente un posicionamiento en dos situaciones diferentes (todo o nada). Por ejemplo, si son utilizados en manipuladores sencillos, en apertura y cierre de pinzas o en determinadas articulaciones de algún robot. Actuadores hidráulicos. Este tipo de actuadores no se diferencian funcionalmente en mucho de los neumáticos. En ellos, en vez de aire se utilizan aceites minerales a una presión comprendida normalmente entre los 50 y 100 bar, llegándose en ocasiones a superar los 300 bar. Existen, como en el caso de los neumáticos, actuadores del tipo cilindro y del tipo motores de aletas y pistones. Sin embargo, las características del fluido utilizado en los actuadores hidráulicos marcan ciertas diferencias con los neumáticos. 16 En primer lugar, el grado compresibilidad de los aceites usados es considerablemente inferior al del aire, por lo que la precisión obtenida en este caso es mayor. Por motivos similares, es más fácil en ellos realizar un control continuo, pudiendo posicionar su eje en todo un rango de valores (haciendo uso del servocontrol) con notable precisión. Por otra parte, este tipo de actuadores presenta estabilidad frente a cargas estáticas. Esto indica que el actuador es capaz de soportar cargas, como el peso o una presión ejercida sobre una superficie, sin aporte de energía (para mover el embolo de un cilindro sería preciso vaciar este de aceite). También es destacable su elevada capacidad de carga y relación potencia-peso, así como sus características de autolubricación y robustez. Frente a estas ventajas existen también ciertos inconvenientes. Por ejemplo, las elevadas presiones a las que se trabajan propician la existencia de fugas de aceite a lo largo de instalación. Asimismo, para los eléctricos, necesitando de equipos de filtrado de partículas, eliminación de aire, sistemas de refrigeración y unidades de control de distribución. Los accionamientos hidráulicos se usan con frecuencia en aquellos robots que deben manejar grandes cargas. Así, este tipo de accionamiento ha sido usado por robots como el UNIMATE 2000 y 4000 con capacidades de carga de 70 y 205kg, respectivamente. Para que se pueda dar la conversión de energía eléctrica en energía mecánica de forma continua es necesario que los campos magnéticos del estator y del rotor permanezcan estáticos entre sí. Esta transformación es máxima cuando ambos campos se encuentran en cuadratura. El colector de delgas es un conmutador sincronizado con el rotor encargado de que se mantenga el ángulo relativo entre el campo del estator y el creado por las corrientes rotóricas. De esta forma se consigue transformar automáticamente, en función de la velocidad de la maquina, la corriente continua que alimenta al motor en corriente alterna de frecuencia variable en el inducido. Este tipo de funcionamiento se conoce con el nombre de autopilotado. Al aumentar la tensión del inducido aumenta la velocidad de la maquina. Si el motor está alimentado a tensión constante, se puede aumentar la velocidad disminuyendo el flujo de excitación. Pero cuanto más débil sea el flujo, menor será el par motor que se puede desarrollar para una intensidad de inducido constante, en el caso de control por inducido, la intensidad del inductor se mantiene constante, mientras que la tensión del inducido se utiliza para controlar la velocidad de giro. En los controlados por excitación se actúa al contrario. Además, en los motores controlados por inducido se produce un efecto estabilizador de la velocidad de giro originado por la realimentación intrínseca que posee a través de la fuerza contra electromotriz. Por estos motivos, de los dos tipos de motores DC es el controlado por inducido el que se usa en el accionamiento con robots. 17 Para mejorar el comportamiento de este tipo de motores, el campo de excitación se genera mediante imanes permanentes, con lo que se evalúan fluctuaciones del mismo. Estos imanes son de aleaciones especiales como samario-cobalto. Además, para disminuir la inercia que poseería un rotor bobinado, que es el inducido, se construye este mediante una serie de espiras serigrafiadas en un disco plano, este tipo de rotor no posee apenas masa térmica lo que aumenta los problemas de calentamiento por sobrecarga. Las velocidades de rotación que se consiguen con estos motores son del orden de 1000 a 3000 rpm con un comportamiento muy lineal y bajas constantes de tiempo. Las potencias que pueden manejar pueden llegar a los 10KW. Como se ha indicado, los motores DC son controlados mediante referencias de velocidad. Estas normalmente son seguidas mediante un bucle de realimentación de velocidad analógico que se cierra mediante una electrónica específica (accionado del motor). Sobre este bucle de velocidad se coloca otro de posición, en el que las referencias son generadas por la unidad de control (microprocesador). El motor de corriente continua presenta el inconveniente del obligado mantenimiento de las escobillas. Por otra parte, no es posible mantener el par con el rotor parado más de unos segundos, debido a los calentamientos que se producen en el colector. Para evitar estos problemas, se han desarrollado en los últimos años motores sin escobillas. En estos, los imanes de excitación se sitúan en el rotor y el devanado de inducido en el estator, con lo que es posible convertir la corriente mediante interruptores estáticos, que reciben la señal de conmutación a través de un detector de posición del rotor. Motores pasó a paso. Los motores paso a paso generalmente no han sido considerados dentro de los accionamientos industriales, debido principalmente a que los pares para los que estaban disponibles eran muy pequeños y los pasos entre posiciones consecutivas eran grandes. En los últimos años se han mejorado notablemente sus características técnicas, especialmente en lo relativo a su control, lo que ha permitido fabricar motores paso a paso capaces de desarrollar pares suficientes en pequeños pasos para su uso como accionamientos industriales. Existen tres tipos de motores paso a paso: -De imanes permanentes. -De reluctancia variable. -Híbridos. En los primeros, de imanes permanentes, el rotor, que posee una polarización magnética constante, gira para orientar sus polos de acuerdo al campo magnético creado por las fases del estator. En los motores de reluctancia variable, el rotor está formado por un material ferro-magnético que tiende a orientarse de modo que facilite el camino de las líneas de fuerza del campo magnético generado por las bobinas de estator. Los motores híbridos combinan el modo de funcionamiento de los dos anteriores. En los motores paso a paso la señal de control son trenes de pulsos que van actuando rotativamente sobre una serie de electroimanes dispuestos en el estator. Por cada pulso recibido, el rotor del motor gira un determinado número de grados. 18 Para conseguir el giro del rotor en un determinado número de grados, las bobinas del estator deben ser excitadas secuencialmente a una frecuencia que determina la velocidad de giro. Las inercias propias del arranque y parada (aumentadas por las fuerzas magnéticas en equilibrio que se dan cuando está parado) impiden que el rotor alcance la velocidad nominal instantáneamente, por lo que esta, y por tanto la frecuencia de los pulsos que la fija, debe ser aumentada progresivamente. Para simplificar el control de estos motores existen circuitos especializados que a partir de tres señales (tren de pulsos, sentido de giro e inhibición) generan, a través de una etapa lógica, las secuencias de pulsos que un circuito de conmutación distribuye a cada fase. Motores de corriente alterna (c.a). Este tipo de motores no ha tenido aplicación en la robótica hasta hace unos años, debido fundamentalmente a la dificultad de su control. Sin embargo, las mejoras que se han introducido en las maquinas síncronas hacen que se presenten como un claro competidor de los motores de corriente continua. Esto se debe principalmente a tres factores: 1. La construcción de los motores síncronos sin escobillas. 2. Uso de convertidores estáticos que permiten variar la frecuencia (y así la velocidad de giro) con facilidad y precisión. 3. Empleo de la microelectrónica que permite una gran capacidad de control. El inductor se sitúa en el rotor y está constituido por imanes permanentes, mientras que el inductor situado en el estator, está formado por tres devanados iguales decalados 120° eléctricos y se alimenta con un sistema trifásico de tensiones. En los motores síncronos la velocidad de giro depende únicamente de la frecuencia de la tensión que alimenta el inducido. Para poder variar esta con precisión, el control de velocidad se realiza mediante un convertidor de frecuencia. Para evitar el riesgo de pérdida de sincronismo se utiliza un sensor de posición continuo que detecta la posición del rotor y permite mantener en todo momento el ángulo que forman los campos del estator y rotor. Este método de control se conoce como autosíncrono o autopilotado. El motor síncrono autopilotado excitado con un imán permanente, también llamado motor senoidal, no presenta problemas de mantenimiento debido a que no posee escobillas y tiene una gran capacidad de evacuación de calor, ya que los devanados están en contacto directo con la carcasa. El control de posición se puede realizar sin la utilización de un sensor adicional, aprovechando el detector de posición del rotor que posee el propio motor. En la actualidad diversos robots industriales emplean este tipo de accionamientos. 19 1.4.2. SENSORES. Para conseguir que un robot realice su tarea con la adecuada precisión, velocidad e inteligencia, será preciso que tenga conocimiento tanto de su propio estado como del estado de su entorno. La información relacionada con su estado (fundamentalmente la posición de sus articulaciones) la consigue con los denominados sensores internos, mientras que la que se refiere al estado de su entorno, se adquiere con los sensores externos. Sensores de Posición. Para el control de posición angular se emplean fundamentalmente los denominados encoders y resolvers. Los potenciómetros dan bajas prestaciones por lo que no se emplean salvo en contadas ocasiones (robots educacionales, ejes de poca importancia). Codificadores angulares de posición (encoders). Los codificadores ópticos o encoders increméntal, en su forma más simple, de un disco transparente con una serie de marcas opacas colocadas radialmente y equidistantes entre sí; de un sistema de iluminación en el que la luz es colimada de forma correcta, y de un elemento foto receptor. El eje cuya posición se quiere medir va acoplado al disco transparente. Con esta disposición a medida que el eje gire se irá generando pulsos en el receptor cada vez que la luz atraviese cada marca, y llevando una cuenta de estos pulsos es posible conocer la posición del eje. Existe, sin embargo, el problema de no saber si en un momento dado se está realizando un giro en un sentido o en otro, con el peligro que supone no estar contando adecuadamente. Una solución a este problema consiste en disponer de otra franja de marcas, desplazada de la anterior de manera que el tren de pulsos que con ella se genere este desplazado 90° eléctricos con respecto al generado por la primera franja. De esta manera, con un circuito relativamente sencillo es posible obtener una señal adicional que indique cual es el sentido de giro, y que actué sobre el contador correspondiente indicando que incremente o decremente. Es necesario además disponer de una marca de referencia sobre el disco que indique que se ha dado una vuelta completa y que, por tanto, se ha de empezar la cuenta de nuevo. Esta marca sirve también para poder comenzar a contar tras recuperarse de una caída de tensión. La resolución de este tipo de sensores depende directamente del número de marcas que se pueden poner físicamente en el disco. Un método relativamente sencillo para aumentar esta resolución es, no solamente contabilizar los flancos de subida de los trenes de pulsos, sino contabilizar también los de bajada, incrementando así la resolución del captador, pudiéndose llegar, con ayuda de circuitos adicionales, hasta 100,000 pulsos por vuelta. El funcionamiento básico de los codificadores o encoders absolutos es similar al de los increméntales. Se tiene una fuente de luz con las lentes de adaptación correspondiente, un disco graduado y una foto receptoras. 20 En este caso, el disco transparente se divide en un número determinado de sectores (potencia de 2), codificándose cada uno de ellos según un código binario cíclico (normalmente código Gray) que queda representado por zonas transparentes y opacas dispuestas radialmente. No es necesario ahora ningún contador o electrónica adicional para detectar el sentido del giro, pues cada posición (sector) es codificado de forma absoluta. Su resolución es fija, y vendrá dada por el número de anillos que posea el disco graduado. Resoluciones habituales van desde 28 29 bits (desde 256 a 524,288 posiciones distintas). Normalmente los sensores de posición se acoplan al eje del motor. Considerando que en la mayor parte de los casos entre el eje del motor y el de la articulación se sitúa un reductor de relación N, cada movimiento de la articulación se verá multiplicado por N al ser medido por el sensor. Este aumentara así su resolución multiplicándola por N. Este problema se soluciona en los encoders absolutos con la utilización de otro encoder absoluto más pequeño conectado por un engranaje reductor al principal, de manera que cuando este gire una vuelta completa, el codificado adicional avanzara una posición. Son los denominados encoder absolutos multivuelta. Esta misma circunstancia originara que en el caso de los codificadores increméntales la señal de referencia o marca de cero, sea insuficiente para detectar el punto origen para la cuenta de pulsos, pues habrá N posibles puntos de referencia para un giro completo de la articulación. Para distinguir cuál de ellos es el correcto se suele utilizar un detector de presencia denominado sincronismo, acoplado directamente al eslabón del robot que se considere. Cuando se conecta el robot desde una situación de apagado, es preciso, ejecutar un procedimiento de búsqueda de referencias para los sensores (sincronizado). Cuando se detecta la conmutación de presencia o ausencia de pieza, o viceversa, se atiende al encoder incremental, tomándose como posición de origen la correspondiente al primer pulso de marca de cero que aquel genere. Los encoders pueden presentar problemas mecánicos debido a la gran precisión que se debe tener en su fabricación. La contaminación ambiental puede ser una fuente de interferencias en la transmisión óptica. Son dispositivos particularmente sensibles a golpes y vibraciones, estando su margen de temperatura de trabajo limitado por la presencia de componentes electrónicos. Sensores lineales de posición (LVDT). Entre los sensores de posición lineales destaca el transformador diferencial de variación lineal (LVDT) debido a su casi infinita resolución, poco rozamiento y alta repetibilidad. Su funcionamiento se basa en la utilización de un núcleo de material ferromagnético unido al eje cuyo movimiento se quiere medir. Este núcleo se mueve linealmente entre un devanado primario y dos secundarios, haciendo con su movimiento que varié la inductancia entre ellos. Los dos devanados secundarios conectados en oposición serie ven como la inducción de la tensión alterna del primario, al variar la posición del núcleo, hace crecer la tensión de un devanado y disminuirá en el otro. Además de las ventajas señaladas, el LVDT presenta una alta linealidad, gran sensibilidad y una respuesta dinámica levada. 21 Su uso está ampliamente extendido, a pesar del inconveniente de poder ser aplicado únicamente en la medición de pequeños desplazamientos. Otros sensores lineales que también se emplean con relativa frecuencia son las denominadas reglas ópticas (equivalentes a los codificadores ópticos angulares) y las reglas magnéticas. En el funcionamiento del Inductosyn el rotor se desliza linealmente sobre el estator. El estator se encuentra excitado por una tensión conocida que induce en el rotor dependiendo de su posición relativa una tensión podemos ver físicamente un sensor lineal de posición. Sensores de velocidad; La captación de la velocidad se hace necesaria para mejorar el comportamiento dinámico de los actuadores del robot. La información de la velocidad de movimiento de cada actuador (que tras el reductor es la de giro de la articulación) se realimenta normalmente a un bucle de control analógico implementado en el propio accionado del elemento motor. No obstante, en ocasiones en las que el sistema de control del robot lo exija, la velocidad de giro de cada actuador es llevada hasta la unidad de control del robot. Normalmente, y puesto que el bucle de control de velocidad es analógico, el sensor usado es una tacogeneratriz que proporciona una tensión proporcional a la velocidad de giro de su eje (10 mili volts por rpm).Otra posibilidad, usada para el caso de que la unidad de control del robot precise valorar la velocidad de giro de las articulaciones, consiste en derivar la información de posición que esta posee. Sensores de presencia; Este tipo de sensor es capaz de detectar la presencia de un objeto dentro de un radio de acción determinado. Esta detección puede hacerse con o sin contacto con el objeto. En el segundo caso se utilizan diferentes principios físicos para detectar la presencia, dando lugar a los diferentes tipos de sensores. En el caso de detección con contacto, se trata siempre de un interruptor, normalmente abierto o normalmente cerrado según interese, actuando mecánicamente a través de un vástago u otro dispositivo. Los detectores de presencia se utilizan en robótica principalmente como auxiliares de los detectores de posición, para indicar los límites de las articulaciones y permitir localizar la posición de referencia de cero de estos en el caso de que sean increméntales. Además de esta aplicación, los sensores de presencia se usan como sensores externos, siendo muy sencillos de incorporar al robot por su carácter binario y su costo reducido. Los detectores inductivos permiten detectar la presencia o contar el número de objetos metálicos sin necesidad de contacto. Presentan el inconveniente de distinto comportamiento según del tipo de metal del que se trate. El mismo tipo de aplicación tiene los detectores capacitivos, más voluminosos, aunque en este caso los objetos a detectar no precisan ser metálicos. En cambio presentan problemas de trabajo en condiciones húmedas y con puestas a tierra defectuosa. Los sensores basados en el efecto Hall detectan la presencia de objetos ferromagnéticos por la deformación que estos provocan sobre un campo magnético. 22 1.5.1 ELEMENTOS TERMINALES Para las aplicaciones industriales, las capacidades del robot básico deben aumentarse por medio de dispositivos adicionales. Podríamos denominar a estos dispositivos como los periféricos del robot, incluyen el herramental que se une a la muñeca del robot y a los sistemas sensoriales que permiten al robot interactuar con su entorno. En robótica, el término de efector final se utiliza para describir la mano o herramienta que está unida a la muñeca. El efector final representa el herramental especial que permite al robot de uso general realizar una aplicación particular. Este herramental especial debe diseñarse específicamente para la aplicación. Los efectores finales pueden dividirse en dos categorías: pinzas y herramientas. Las pinzas se utilizarían para tomar un objeto, normalmente la pieza de trabajo, y sujetarlo durante el ciclo de trabajo del robot. Hay una diversidad de métodos de sujeción que pueden utilizarse, además de los métodos mecánicos obvios de agarrar la pieza entre dos o más dedos. Estos métodos suplementarios incluyen el empleo de casquetes de sujeción, imanes, ganchos, y cucharas. Tabla 1.2. Herramientas terminales para robots. Tipo de herramienta Pinza de soldadura por puntos Comentarios Dos electrodos que se cierran sobre la pieza de soldar Aportan el flujo de electrodo que se funde Soplete soldadura de arco Para trabajos de fundición Cucharón para colada Atornillador Fresa-lija Pistola de pintura Cañón láser Cañón de agua a presión Suelen incluir la alimentación de tornillos Para perfilar, eliminar rebabas, pulir, etc. Por pulverización de la pintura Para corte de materiales Para corte de materiales 23 Una herramienta se utilizaría como efector final en aplicaciones en donde se pide al robot realizar alguna operación en la pieza de trabajo. Estas aplicaciones incluyen la soldadura por puntos, la soldadura por arco, pintura por pulverización y las operaciones de taladro. En cada caso, la herramienta particular está unida a la muñeca del robot para realizar la operación. Se puede establecer una clasificación de los elementos terminales atendiendo así si se trata de un elemento de sujeción o de una herramienta. Los primeros se pueden clasificar según el sistema de sujeción empleado. En la fig. 1.9 se muestra la imagen de un robot con una antorcha de soldadura mig como efector final. Fig. 1.8. Robot aplicando soldadura MIG. Los elementos de sujeción se utilizan para agarrar y sostener los objetos y se suelen denominar pinzas. Se distingue entre las que utilizan dispositivos de agarre mecánico y las que utilizan algún otro tipo de dispositivo (ventosas, pinzas magnéticas, adhesivas, ganchos, etc.) CAPITULO 2 MARCO TEORICO 2.1 Cordones de Soldadura Al inspeccionar visualmente, los cordones de soldadura se pude detectar si están bien soldados o pegados. Si un cordón esta desviado, implica que en una de las piezas este bien soldado y en otra mal soldado, o pegado, tenemos un ejemplo claro de un cordón desviado, en la fig.2.1 el cordón de soldadura esta poco agarrado. 24 Fig. 2.1 Boquilla de soldadura Esto se debe a que, una que el robot está mal corregido, que no tiene el ángulo correctamente orientado, que la antorcha está tocando en alguna parte, que el tubo de contacto tiene holgura causada por el rozamiento del hilo, o que la pieza está mal cargada. Para que los cordones de soldadura este bien soldado, lo fundamental sea, entre otras muchas cosas da al Robot los ángulos de soldadura correctamente (45°) En la fig. 2.2 se da un ejemplo del ángulo correcto para la aplicación de soldadura mig. Fig.2.2 Ángulos de aplicación de soldadura mig Es también muy importante, hacer una selección de los cordones de soldadura por programas, según el tipo de cordones. En un programa podemos tener los horizontales, en otro programa los que se suelden en descendente, y en otro programa los que se suelden a solape, y en otro programa los que se suelden con distintos espesores. Esto hace que cuando modifiquemos algún parámetro de soldadura solo afecte a cordones similares. En la fig. 2.3 se observa las diferentes técnicas de soldadura, y la distancia a la que se debe soldar. 25 Fig. 2.3 Tipos de cordones de soldadura 2.1.2 La penetración de un cordón de soldadura En descendente es menor que en horizontal, es por esto que siempre que sea posible se debe soldar en posición horizontal. En excedente la pistola de soldar debe formar un ángulo de 65° aproximadamente en el sentido del avance de la soldadura. Se muestra una soldadura en descendente, con la pistola formando un ángulo contrario al sentido del avance se soldadura. Si se soldara en descendente con este ángulo 65°, el metal de aportación se descuelga, pasa delante del punto de fusión y la soldadura queda pegada, no tiene ninguna penetración. 2.2. Sistema de soldadura. MIG, MAG. Es un proceso semiautomático, automático o robotizado de soldadura que utiliza un electrodo consumible y continuo que es alimentado a la pistola junto con el gas inerte en soldadura MIG o gas activo en soldadura MAG que crea la atmósfera protectora. Hace que no sea necesario estar cambiando de electrodo constantemente. El método MIG (Metal Inerte Gas) utiliza un gas inerte (Argón, Helio o una mezcla de ambos. Una función que tiene mucha importancia en la penetración de la soldadura es la distancia se tiene entre el tubo de contacto, o boquilla, y las piezas a soldar, cuanto mayor sea la distancia, menor será la penetración de la soldadura, y también será más las proyecciones que se esta aportando a las piezas, una distancia correcta seria entre tobera y pieza de 15mm. Esta distancia, en muchos casos no es posible por la conformación de la pieza, que es lo que tenemos que tener en la cuenta al corregir un Robot en un cordón de soldadura. Muchas veces los parámetros de soldadura, está bien, y los cordones mal, les falta espesor, están rugosos, parece que el metal de aportación está pegado, es fácil de separar las piezas, los cordones están llenas de escoria, los motivos pueden 26 ser varios, los arrastres están muy apretados, esto hace que estemos laminando el recubrimiento del hilo, y el polvo que produce la laminación nos está haciendo dos cosas, una atascar el tubo de contacto, y la sirga, y otra que la función sea peor. Para regular bien los arrastres del hilo de soldar, y que estos no laminen el hilo, se deben apretar poco, y comprobar tirando a la salida del tubo de contacto, con el alicate de cortar el hilo hasta que este no patine en los arrastres. La falta de fusión puede ser: Porque la masa está deteriorada, y se calienta; porque por alguna fase no llega la corriente necesaria para soldar; y esto también generan muchas escorias; así como una distancia entre pieza y tubo de contacto excesivo. 2.3 Parámetros de soldadura Los parámetros para hacer una buena soldadura son los que necesitan, y para esto nadie tiene una receta justa, se puede tener orientación aproximada, pero quien dice que los parámetros se necesitan en cada equipo de soldadura son las personas que saben que es una soldadura: Que tiene criterios claros , es casi imposible que dos equipos de soldar realicen una soldadura igual, en sitios y momentos distintos, los parámetros de un equipo de soldadura se ajustan en el puesto trabajando , y nunca haciendo comparaciones con otros equipos iguales o similares. Tengamos presente, que los arrastres para sacar el hilo del tambor trabajan a tracción, y para hacer que el hilo salga por la sirga de la antorcha, trabajan a compresión, es por esto, la importancia, de la longitud de las antorchas, cuanto más larga sea las antorchas mas se doblan, y se deterioran en los movimientos que hace el robot cuando suelda y limpia la tobera, las sirgas limpias, los tubos de contacto sin holguras ni proyecciones, hacen que los cordones de soldadura tengan Calidad. En las toberas también se pegan proyecciones, y estas hacen que se desvié el gas de protección, en la zona que estamos soldando, y salgan poros en el cordón de soldadura. Las proyecciones que muchas veces se pegan en el orificio del tubo de contacto, hacen unas veces que el hilo salga con dificultad, y otras que el hilo no esté en la zona y con el ángulo que nosotros habíamos corregido. El gas de protección, tiene que estar bien ajustado para la consecución de una buena soldadura; por la tobera no debe de salir menos de 12 litros/minuto, menos de esta cantidad puede hacer, que en el cordón de soldadura salgan poros, la mezcla del gas también es importante, tiene que estar ajustada a la Calidad de la soldadura que queremos conseguir. 27 2.3.1 mezcla para soldadura MAG Es 87% de argón, y 13% de CO2, es una mezcla capaz de conseguir soldaduras de mucha calidad: cuanto mayor sea la cantidad de CO2, mayor será la penetración de la soldadura, una mezcla rica en CO2 produce más proyecciones que si es rica en argón. Algunas veces salen poros en las soldaduras, que son debidos a fugas de aire en el sistema neumático de la paleta, a corrientes de aire, que entra por alguna puerta que está abierta: Si la fuga o la corriente están orientadas a la zona de soldadura del cordón queda sin proteger, y salen los poros. Si la mezcla de Argón es muy alta, la soldadura aparece estrecha, esto es debido a que no tiene penetración, también aparecen las piezas, limpias de proyecciones, una mezcla muy alta de Argón se puede emplear para uniones soldadas a tope, donde las piezas a unir tengan mucho aire: O que se empleen sistemas de soldadura tándem o doble hilo donde el aporte de calor es grande, y la mezcla del gas puede ser, 96% de Argón y 4% de CO2. De una forma general la posición del hilo de soldar esta situada en el plano de la junta, debe formar un ángulo de 45° con la chapas a unir y formando un ángulo de 60° a 65° con respecto a la línea de la unión en el sentido del avance de la soldadura. También se tiene que tener en cuenta si se suelda arrastrando, o empujando, empujando, arrastrando. La diferencia entre ascendente y descendente, es que arrastrando la penetración de la soldadura es un 15 % superior que empujando. Al tener diferencias de penetración según el método que empleamos al soldar, (empujando o arrastrando) podemos cambiar el método según nos beneficie la soldadura. Si una soldadura nos está perforando las piezas con unos parámetros determinados, y estamos soldando arrastrando, podemos hacer que suelden empujando, y al contrario, esto lo podemos conseguir, de dos formas, una, si en la especificación no nos dice nada de la dirección de la soldadura, podemos cambiar las instrucciones de soldadura, donde termina de soldar, que comience, y así mantenemos la corrección del robot , otra cambiando el ángulo de la antorcha podemos trasformar lo que antes era arrastrando, ahora es empujando. Si soldamos arrastrando, tenemos que tener en cuenta que las proyecciones quedan encima del cordón de soldadura, si soldamos empujando, las proyecciones saltan de la parte de la pieza, que esta sin soldar, y el cordón queda limpio de proyecciones. Es muy importante tener en cuenta: Que si un robot se para, por colisión o anomalía, no se ponga en marcha, sin antes comprobar la causa que ha producido dicha anomalía, o colisión. Si un robot se para por colisión es que algún obstáculo se interfiere en su camino, puede ser que el hilo se queda pegado al metal de aportación, que la paleta no esté bien cerrada, quela pieza este mal cargada, algún cable de detectores, o tubos de 28 aire que se soltó de las de las bridas de sujeción, y se enredo con la antorcha: Por lo que es un riesgo, poner el robot en marcha, sin antes comprobar la posición. 2.3.2Formas de los cordones Mientras que en las soldaduras en ángulo exterior el espesor de la soldadura queda limitada por el grueso de las planchas a unir. En las soldaduras en ángulo interior esta limitación no existe, y el espesor de metal depositado debe determinarse considerando la resistencia que se desea para la unión soldada. Ya que se consigue una mayor penetración de la soldadura, en el vértice de la unión de las piezas a soldar, y al mismo tiempo se traduce en una mayor resistencia de la unión soldada: Por lo que la pieza se rompería si está sometida a esfuerzos de fatiga . En las soldaduras a solape, letra D, de la el mejor cordón es el plano, cualquier otro tipo de cordón debilitaría la resistencia de la soldadura. En la sección de la zona fundida , se aprecian diferencias de estructuras y otras modificaciones que son debidas a la diferencia de temperatura que alcanzan las piezas soldadas, y a la diferencia de velocidad de enfriamiento que hay entre las distintas zonas, donde T, es la temperatura que alcanzan las distintas zonas, y V, es la velocidad de grados , que disminuye la temperatura , por minuto, que es menor, a la medida que se aleja del cordón de soldadura. 2.3.3 Definiciones de los cordones de soldadura. Cordones frontales Son aquellos cordones que se presentan perpendicularmente a la dirección de la fuerza. Cordones laterales: Son aquellos cordones que se presentan en la misma dirección de la fuerza. Cordones oblicuos, Son los cordones cuya dirección no es perpendicular ni igual que la de la fuerza sino que presentan una posición intermedia de manera que el eje del cordón y la dirección del esfuerzo forman un ángulo comprendido entre 0 y 90°. Garganta de un cordón. La dimensión principal de un cordón de Soldadura es la garganta; la longitud. También es importante de la longitud del lado del cordón La que más se suele usar, es el valor porque es longitud menor. Cordones sometidos a esfuerzos de tracción y cortadura: 29 Reglas que se debe tener en cuenta al proyectar uniones de soldadura; 1) Evitar los cambios bruscos de sección, en el lugar de la soldadura. 2) Si hay un cambio brusco de sección, es probable que se inicie en ese lugar una grieta del cordón de soldadura, que terminara rompiendo la pieza. 3) Se tiene que evitar, la unión de piezas de diferentes espesores, si esto no se hace así, en cuanto estas estén sometidas a esfuerzos variables, se iniciara la rotura del cordón de soldadura. Cuando se tiene que soldar un cordón, que tiene la longitud de 50mm. La especificación dice que la longitud eficaz del cordón, tiene que tener 50 mm. No queda otra solución que hacer al cordón, entradas, y salidas, lo que se conoce como cordones con bigote: Y así los cráteres de cebado y extinción, quedan en las entradas y salidas. Se deben evitar las soldaduras entre piezas de diferentes espesores. Si se soldán piezas, de diferentes espesores , la velocidad de enfriamiento, es distinta en ambas, por lo que se crean tensiones que pueden llegar a la rotura de la soldadura , incluso en piezas estáticas. Desnivelación de los bordes: Tenemos un ejemplo de cómo suele ocurrir muy a menudo, los bordes a soldar no se encuentran a la misma altura, esto puede ser debido a una mala sujeción en la mesa de soldadura. Se da una orientación de cómo un robot, teniendo bien el ángulo de soldadura, esta soldando al límite: Esto puede ser porque los componentes no están bien cargados, o no son iguales, la corrección del robot, no se realizo correctamente, el tubo de contacto esta gastado, o tiene escoria en la salida. No está correctamente cargada, por lo que es fácil comprender tres cosas, una que el robot al estar golpeándose la tobera contra la pieza, no está bien soldada y la tercera que el conjunto no estará dentro de medidas. El robot está mal corregido, la tobera está pegando en un tope, o cierre de la paleta, esto hace que la soldadura se este desviando. 30 2.4 Corrección de robot por coordenadas Los robots se pueden corregir por coordenadas, es más rápido, limpio, no es necesario entrar en la maquina, se puede hacer desde la maleta de programación: Pero en ningún caso es aconsejable corregir un robot por coordenadas, se tiene que estar muy seguro de en qué posición se encuentra el robot, y a qué distancia de los útiles y amarres de la paleta de soldadura; Y es desaconsejable, por que cuando un cordón sale mal, lo que podemos saber es, si el robot esta desviado de la unión de las piezas por una mala corrección, si el ángulo de soldadura está mal, o si está pegando la antorcha en alguna parte. Se tiene que hacer una pequeña corrección, levanta, acercar, separa, o bajar, lo debemos hacer en coordenadas rectas, no se deben mover los ángulos de soldadura: Cuantas veces, cuando corregimos un robot en una soldadura recta, y le rodamos vemos como se desplaza moviendo varios ejes, y al mismo tiempo los ángulos de soldadura. La penetración de un cordón de soldadura, la profundidad que alcanza el metal de aportación, por debajo de la superficie del metal base. Altura de un cordón de soldadura: Es la altura que el metal de aportación alcanza por encima del metal base. Es la máxima distancia que el metal de aportación alcanza sobre la superficie del metal base. Se pueden presentar fisuras en la soldadura: La fisuracion de la soldadura en frio, o retardada ocurre desde la temperatura ambiente hasta 250 grados centígrados y puede tardar meses en producirse. Ocurre en el metal depositado en la zona de transición. Área de soldadura de sección insuficiente, presencia de impurezas, altas velocidades de soldadura a bajas intensidades. 2.5 La transferencia en modo spray Produce gotas de diámetro inferiores al diámetro del hilo, y genera una gran cantidad de calor y buena penetración; Por lo que se debe emplear para soldar espesores superiores a 3mm. En la fig. 2.4 se muestra diferentes técnicas para la aplicación de soldadura mig. 31 Fig.2.4 Aplicaciones de soldadura La transferencia en modo globular, es de modo irregular, el cambio irregular de las gotas hace que estas se conecten con el hilo y la pieza, formando un corto circuito, que momentáneamente hace que el arco se apague. 2.6 Soldadura regulada por escalones Se debe intentar cebar y extinguir el arco en una zona donde la distancia entre la pieza y la tobera sea más o menos el normal. En la fig. 2.5 se muestra como ajustar la distancia de la tobera cuando la superficie a soldar es irregular. Fig.2.5 Soldadura por escalones Si el arco en una distancia con la tobera en la pieza es superior a 20mm, se producirán fallas de cebado y proyecciones. Al extinguir el arco se debe procurar hacer la extinción a una distancia que no sea superior a los 15mm. Si esto no se hace así, la siguiente soldadura que realiza el robot hace el cebado a la distancia de 15mm, y tiene un sobrante de la soldadura anterior de 50mm, el robot se estará golpeando continuamente con la punta del hilo contra la pieza, dando fallos y produciendo proyecciones. 32 CAPITULO 3 ELEMENTOS INTEGRADORES DEL PROCESO 3.1 DISPOSITIVOS Estos dispositivos están diseñados para que el ensamble este a prueba de errores, ya que solo hay una forma de acomodar las piezas a soldar y así garantizar que el componente esta bien hecho. En la fig. 3.1 se muestra el dispositivo de ensamble, así como un componente de la pieza. Fig. 3.1-Mesa de trabajo del robot Por medio de clamp y cilindros neumáticos controlados por válvulas y un plc, se sujetan los componentes para que el proceso automatizado sea confiable, que siempre se va a repetir la misma posición. En la fig. 3.2 se muestran los clamps y cilindros neumáticos. Fig.3.2 Clamp y cilindros neumáticos 3.2.1 CILINDROS NEUMÁTICOS (CLAMPS). Son los elementos mecánicos – neumáticos que sujetan las piezas a ensamblar. Estos se localizan sujetos al dispositivo y forma parte del mismo dispositivo de ensamble. 33 3.2.2 ELECTROVÁLVULAS. Estas se ubican en la parte inferior del dispositivo y son las encargadas de activar el cierre y apertura de los cilindros neumáticos que en este caso llamaremos CLAMP. En la fig. 3.3 se muestra la imagen de un modulo de electroválvulas. Fig. 3.3 Ejemplo de una electroválvula 3.2.3. CONEXIONES MULTICONTACTO. De gran importancia ya que son los encargados de llevar las señales al PLC y también con ello se logra alimentar todos nuestros elementos eléctricos, electrónicos y electromecánicos. En la fig. 3.4 se muestran las Conexiones utilizadas para comunicación de señales y voltajes. Fig.3.4. Conexiones multicontacto. 34 3.3. TABLERO DE CONTROL. Es aquí en donde se localiza el PLC, el cual está conformado por tres partes: La sección de entrada/salidas, el procesador y el dispositivo de programación. En la fig.3.5 Se muestra como esta distribuido el tablero de control, Plc, tarjetas de entradas/salidas fuente de alimentación Fig. 3.5. Tablero del PLC. 3.3.1. Sección de entradas/salidas. La sección de entradas/salidas de un controlador lógico programable tiene a su cargo la función de interconectar los dispositivos industriales de alta potencia, al sistema de circuitos electrónicos de baja potencia que almacena y ejecuta el programa de control. El chasis de entradas/salidas es un contenedor mecánico con ranuras para sostener tarjetas de circuitos impresos (modulo) que contiene 16 convertidores de señales de entrada o 16 amplificadores de salida. Una ranura del chasis de E/S contiene un modulo de entrada diseñado para una entrada de 120 V. Otra ranura del chasis de E/S contiene otro módulo de entrada. Este módulo de entrada contiene 16 amplificadores de salida de acoplamiento óptico diseñado para activar cargas de 120V. c.a 3.3.2. El procesador. El procesador de un PLC mantiene y ejecuta el programa. Para llevar a cabo este trabajo, el procesador debe almacenar las condiciones de entrada salida más actualizadas. 35 3.3.3. El dispositivo de programación. La tercera parte esencial de un PLC es el dispositivo de programación, el cual es también denominado terminal de programación. Para poder programar el PLC utilizaremos un cable de comunicación serial que se conecta a la tarjeta de la interface, uniéndola con el procesador del PLC. Lógicamente debemos tener instalado en nuestra computadora portátil el software de programación, en este caso sería el RSLogix. 3.4. SOFTWARE RSLOGIX 500™ (SOFTWARE DE PROGRAMACIÓN). RSLogix 500, es un paquete de software para Microsoft® Windows 95® y Windows NT® de 32-bit, para Allen-Bradley SLC 500 y familias de procesadores de MicroLogix. RSLogix 500 es diseñado para ofrecer gran funcionalidad, diagnósticos superiores, comunicación fiable, y una interfaz fácil de usar. RSLogix 500 proporcionará todo lo que se necesita para nuestra integración en un paquete de software de programación, desde la vista del proyecto terminado hasta la edición del arrastrar y dejar. Más, RSLogix 500 es parte de la familia de productos de RSLogix que comparten: Una interfaz de usuario común y grupo de características Flexible, edición fácil-de-usar Apunte y pulse para la configuración de I/O Poderosa base de datos para la edición Herramientas de diagnóstico y solucionador de problemas Comunicaciones seguras La familia de RSLogix™ de paquetes de programación lógica de escalera nos ayudará a aumentar el desempeño, salvar el proyecto en pleno desarrollo, y mejorar la productividad. Esta familia de productos se ha desarrollado para operar en sistemas operativos de Microsoft® Windows®. Apoyando al Allen-Bradley SLC™ 500 y las familias de procesadores de MicroLogix™, RSLogix™ 500 fue el primer PLC® en programarse con este software para ofrecer la productividad insuperable con una interfaz industrial principal de usuario. 3.5 Limpiador de boquillas Este dispositivo tiene como finalidad mantener limpia la boquilla de la antorcha en el robot ya que se queda pegada la escoria de la soldadura y si no se limpia se tienen problemas de penetración y poros en los cordones. En la fig. 3.6 se muestra el limpiador de boquillas. 36 Fig.3.6. Limpiador Boquilla para robot El robot está programado para que después de cierto tiempo o número de piezas soldadas, salga del trabajo para hacer la auto limpieza de la boquilla por medio de un cilindro, impulsado por un motor el cual al girar quita la escoria que se le queda pegada, y al final se le aplica un polímero por medio de aire a presión para que se le pegue la menor escoria posible. En la fig.3.7 se muestra la limpieza de la tobera y la aplicación del polímero antiadherente. Fig. 3.7. Ejemplo de la autolimpieza del robot mig 3.6 MAQUINA DE SOLDADURA MILLER La maquina de soldar es un complemento indispensable ya que es la que funde el micro alambre para genera la soldadura. 37 Por medio de una interface se conecta al robot para que se puedan manipular los parámetros de soldadura. En la fig. 3.8 Se muestra la maquina de soldar con las siguientes características; Modelo 450 amp, salida nominal de la corriente 300 A at 32 (29) voltios CD 100% ciclo de trabajo, gama de voltaje de CD 10-38, máximo voltaje de circuito abierto CD 48, nomina de ip 21m, entrada de amperios a la salida nominal de corriente, 50 o 60 hz trifásica 33. Fig. 3.8 Maquina de soldadura 3.7 ALIMENTADOR DE MICROALAMBRE Este elemento que a continuación se menciona su objetivo es dar el avance al micro alambre, este modelo de robot que se utiliza para la integración (ssa2000) ya tiene integrado el alimentador. En la fig. 3.9 se muestra el mecanismo con el cual se le da el avance al microalambre. Fig. 3.9 Alimentador de Micro alambre 38 CAPITULO 4 INTEGRACION DEL ROBOT EN LA LINEA DE PRODUCCION 4.1 ROBOT SSA2000 El robot ssa2000 de motoman esta ya diseñado para la aplicación de soldadura mig, ya que su anatomía es esbelta, cuenta con seis grados de libertad y el alimentador de micro alambre. En la fig. 4.1 se muestra el control del robot, así como el teach pendant; en la fig. 4.2 se muestra el cuerpo del robot y la antorcha de soldadura. Fig. 4.1 Control NX100 robot SSA2000 Fig.4.2 Robot SSA2000 El control del robot cuanta con las siguientes características; modelo nx100/Motoman-ssa2000, type ercr ea1400n-ab60, power supply 480 v 60 hz 3 phase 5.0 kva, interrupt current 100ka, serial numero 586ª01-2-4-m, date 5-2008, yaskawa electric corporation, made in Japón. 4.2 MASTERIZACION DEL ROBOT La masterizacion del robot es el primer paso para la integración del proyecto ya que es la forma de configurar los ejes del robot dándoles la posición de cero. Para masterizar al robot se mueve los ejes uno por uno hasta llegar a las marcas del fabricante y ahí se configura el cero. En la fig.4.3 se muestra la posición del robot eje por eje. Fig. 4.3 Posición del robot para masterizar 39 4.3 CENTRO DE HERRAMIENTA (TCP) Cada vez que grabamos un punto, éste se nos puede representar en grados y en coordenadas cartesianas. En coordenadas cartesianas, las cotas grabadas, son, de hecho, las del TCP (Tool CenterPoint = Punto Central de la Herramienta), respecto del origen del sistema de coordenadas cartesianas activo en ese momento y elegido previamente por el usuario. (WORLD por defecto). En la fig. 4.4 se muestra el centro de la placa del eje 6 del robot por defecto el TCP. Fig4.4 Punto de ubicación del TCP El TCP es el origen de la referencia herramienta. La referencia herramienta por defecto esta orientada. Cuando se crea una referencia de herramienta, el TCP se desplaza al extremo de la herramienta utilizada. La referencia herramienta puede ser orientada según el eje de ataque de esa herramienta. En la fig. 4.5 se muestran los ejes y movimientos del robot para calibrar el tcp. Fig4.5 Ubicación de ejes del robot 40 4.4 PROGRAMACION DEL ROBOT La programación del robot se hace con el teach pendant, con el cual puedes mover el robot y guardas sus trayectorias. En la fig.4.6 se muestras las características del teach pendant. Fig. 4.6 teach pendant 4.4.1 MOVIMIENTOS DEL ROBOT JOINT. En el sistema de coordenadas específicas JOINT, cada eje puede desplazarse en forma individual, en dirección positiva o negativa del eje. Se puede mover ejes simultáneamente. El movimiento en JOINT se mide en “grados º”. CARTESIANAS: XYZ WORLD (Coordenadas Absolutas fijas). El sistema de coordenadas WORLD es un sistema de coordenadas cartesianas, tridimensional, estático, universal, cuyo origen, se encuentra en un punto conceptual, no físico, sobre cada unidad mecánica. Es un sistema definido por el propio software. Es origen para todo movimiento cartesiano. Viene definido de fábrica. Es fijo e inamovible. CARTESIANAS: XYZ USER (Coordenadas relativas móviles). El sistema de coordenadas USER es un sistema de coordenadas cartesianas, cuyo origen viene definido por el usuario. Se disponen de 9 sistemas de coordenadas USER programables. 41 CARTESIANAS: XYZ JOGFRM (Coordenadas relativas fijas). El sistema de coordenadas JOGFR es un sistema de coordenadas cartesianas cuyo origen viene definido por el usuario. Se utiliza para mover linealmente de manera eficaz el robot respecto de un área de trabajo. CARTESIANAS: TOOL. El sistema de coordenadas TOOL es un sistema de coordenadas cartesianas, cuyo origen es definible por el usuario y programable, es decir, puede ser móvil. Se disponen de 9 sistemas de coordenadas TOOL programables. En la fig.4.7 se muestran los 6 grados de libertan y sus direcciones del robot. Fig. 4.7 Movimientos del Robot eje por eje 4.5. CABLEADO DE DISPOSITIVOS Y PLC AL ROBOT Las mesas de trabajo van conectadas a los módulos de entradas y salidas del plc, una vez conectadas las mesas, se configuran las entradas y salidas del robot, para así poder hacer el enlace entre los dispositivos el plc y el robot. En la fig.4.8 se muestra las tarjetas de entradas/salidas del robot. 42 Fig.4.8 Interface robot SSA2000 4.6. PROGRAMACION DE MOVIMIENTOS DEL ROBOT La programación de movimientos del robot se hace directamente a pie de maquina se van gravando movimiento por movimiento, en primera instancia se hace la simulación del programa paso a paso y posteriormente ya que se está segura de las trayectorias del robot se puede simular la programación en modo automático. En la fig.4.9 se muestra la programación del robot a pie de maquina. Fig. 4.9 Programación de movimientos del robot SSA2000 Una vez lograda la trayectoria deseada se incorporan los parámetros de soldadura estos para metros ya están estandarizados por la empresa Chrysler. 43 En la figura 4.10 se muestran los componentes que forman la pieza a producir, Para poder realizar este ensamble se necesitan 5 mesas de trabajo debido al grado de complejidad de la pieza. Los componentes se van uniendo por medio de las mesas hasta llegar al ensamble final. Pieza(a) Pieza (b) Pieza (d) Pieza (g) Fig.4.10 Pieza (e) Pieza (h) Pieza (c) Pieza (f) Pieza (i) Componentes y pieza ensamblada para la conducción derecha de un automóvil 44 4.7 PROGRAMAS DEL ROBOT En la figura 4.11 se muestra la pantalla del teach pendant, en al cual se pueden ver la instrucciones para realizar una secuencia en el robot. Fig. 4.11 Pantalla de programación del teach pendant robot SSA2000 Para la realización del programa se le graba el primer paso que comúnmente es llamado home, (0001 MOVJ VJ=25.OO) porque es el punto donde se iniciara la secuencia posterior mente se van grabando varias posiciones hasta llegar al área de trabajo. Estando el robot en posición se inserta al programa la instrucción de soldadura (0004 ARCON AC=160 ampers AV=19.0 volts T=0.20 cm/min V=30), una vez realizado el cordón de soldadura se coloca en el programa el fin del ciclo. (0009 ARCOF AC=160 AV=18.0 T=0.01), así con este procedimiento se realizan los cordones de soldadura deseados. Otra instrucción utilizada en el programa es: 0012 PULSE OT# (3), la cual es para indicarle al robot que tiene que esperar una salida que en este caso es un válvula, para así continuar con la secuencia. La instrucción 0013 WAIT IN# (4) =ON se utiliza para esperar una entra, esta puede ser un botón pulsador o un sensor. En el capitulo 4.7.1 se muestran los cinco programas del robot, por medio de los cuales se va realizando el ensamble de la pieza. 45 Diagrama de flujo de la programación Robot modo automático Programa máster Mesas de Limpieza de boquilla Trabajo Inicio de Ciclo Fin de Ciclo 46 4.7.1 PROGRAMA MESA 1 000 NOP 0001 MOVJ VJ=25.OO 0002 MOVJ VJ=25.00 0003 MOVJ VJ=25.00 PL=0 0004 ARCON AC=160 AV=19.0 T=0.20 V=30 RETRY REPLAY 0005 WVON WEV# (4) 0006 MOVL 0007 MOVL 0008 WVOF 0009 ARCOF AC=160 AV=18.0 T=0.01 ANTSTK 0010 MOVJ VJ=25.00 0011 MOVJ VJ=25.00 0012 PULSE OT# (3) //MUEVE SEC M1 0013 WAIT IN# (4) =ON //CONTINUA MESA 1 0014 MOVJ VJ=25.00 0015 MOVJ VJ=25.00 0016 MOVJ VJ=25.00 0017 ARCON AC=160 AV=19.0 T=0.20 V=35 RETRY REPLAY 0018 WVON WEV# (4) 0019 MOVL 0020 MOVL 0021 WVOF 0022 ARCOF AC=160 AV=19.0 T=0.01 ANTSTK 0023 MOVJ VJ=25.00 0024 MOVJ VJ=25.00 47 0025 MOVJ VJ=25.00 0026 PULSE OT# (4) // MUEVE SEC M1 0027 RET 0028 END 4.7.2 PROGRAMA MESA 2 0000 NOP 0001 MOVJ VJ=25.00 0002 MOVJ VJ=25.00 0003 MOVJ VJ=25.00 0004 MOVJ VJ=25.00 0005 ARCON AC= 172 AV= 18.5 T=0.02 V= 47 RETRY REPLAY 0006 MOVL 0007 MOVL 0008 MOVL 0009 PULSE OT# (1) // MUEVE SEC M2 0010 MOVL 0011 MOVL 0012 MOVC 0013 MOVC 0014 MOVC 0015 MOVC 0016 MOVC 0017 MOVC 0018 MOVL 0019 WVOF 0020 ARCOF AC=170 AV=18.0 T=0.01 ANTSTK 48 0021 MOVJ VJ=25.00 0022 PULSE OT# (2) // MUEVE SEC M2 0023 WAIT IN# (2) =ON 0024 MOVJ VJ=25.00 0025 CALL JOB: MESA-2-B 0026 RET 0027 END 4.7.3 PROGRAMA MESA 3 0000 NOP OOO1 MOVJ VJ=25.00 0002 PULSE OT# (5) //MUEVE SEC MESA 3 0003 MOVJ VJ=25.00 0004 DIPS-1 0005 MOVJ VJ=25.00 0006 ARCON AC=163 AV=18.4 T=0.02 V=21 RETRY REPLAY 0007 WVON WEV# (5) 0008 MOVL 0009 MOVC 0010 MOVC 0011 MOVC 0012 MOVL 0013 MOVC 0014 MOVC 0015 MOVC 0016 MOVL 0017 WVOF 49 0018 ARCOF AC=165 AV=18.0 T=0.02 V=28 RRETRY REPLAY 0019 MOVJ VJ=50.00 0020 DIPS_2 0021 MOVJ VJ=25.00 0022 MOVJ VJ=25.00 0023 MOVJ VJ=25.00 0024 ARCON AC=160 AV=19.0 T=0.02 V=28 RETRY REPLAY 0025 MOVL 0026 WVOF 0027 ARCOF AC=145 AV=19.0 T=0.01 0028 MOVJ VJ=25.00 0029 PULSE OT# (6) //CIERRA CLAMP DERECHA 0030 WAIT IN# (5) =ON //LLAMAR MESA 3 0031 MOVJ VJ=25.00 0032 MOVJ VJ=25.00 0033 MOVJ VJ=25.00 0034 MOVJ VJ=25.00 0035 ARCON AC=160 AV=19.0 T=0.02 V=28 RETRY REPLAY 0036 MOVL 0037 WVOF 0038 ARCOF AC=145 AV=19.0 T=0.01 ANTSTK 0039 MOVJ VJ=25.00 0040 MOVJ VJ=25.00 0041*DISP3 0042 MOVJ VJ=25.00 0043 MOVJ VJ=25.00 50 0044 MOVJ VJ=25.00 0045 MOVJ VJ=25.00 0046 ARCON AC=176 AV=19.5 T=0.02 V=25 RETRY REPLAY 0047 WVON WEV# (8) 0048 MOVL 0049 MOVL 0050 MOVL 0051 MOVL 0052 MOVL 0053 MOVL 0054 MOVL V=22 0055 WVOF 0056 ARCOF AC=140 AV=18.5 ANTSTK 0057 MOVJ VJ=25.00 0058 PULSE OT-(6) //CIERRA CLAMP DERECHO 0059 WAIT IN# (5)=ON //LLAMAR MESA 3 0060 MOVJ VJ=25.00 0061 PULSE OT# (6) //CIERRA CLAMP DERECHO 0062 WAIT IN# (5) =OFF //LLAMAR MESA 3 0063 END 4.7.4 PROGRAMA MESA 4 0000 NOP 0001 MOVJ VJ=25.00 0002 PULSE OT# (9) // ACTIVAR AIRE 0003 MOVJ VJ=25.00 0004 MOVJ VJ=25.00 51 0005 MOVJ VJ=25.00 0006 MOVJ VJ=25.00 0007 ARCON AC=170 AV 19.0 T=0.01 V=22 RETRY REPLAY 0008 WVON WEV# (9) 0009 MOVL 0010 MOVL 0011 WVOF 0012 ARCOF AC= 165 AV=19.0 0013 MOVJ VJ=25.00 0014 MOVJ VJ=25.00 0015 MOVJ VJ=25.00 0016 MOVJ VJ=25.00 0017 MOVJ VJ=25.00 0018 MOVJ VJ=25.00 0019 MOVJ VJ=25.00 0020 ARCON AC=160 AV=19.0 T=0.01 V=18 RETRY REPLAY 0021 WVON WEV# (10) 0022 MOVL 0023 MOVC 0024 MOVC 0025 MOVC 0026 MOVL 0027 MOVC 0028 MOVC 0029 MOVC 0030 MOVL 52 0031 WVOF 0032 ARCOF AC=160 AV=18.0 0033 MOVJ VJ=25.00 0034 SUB2 0035 MOVJ VJ=25.00 0036 MOVJ VJ=25.00 0037 MOVJ VJ=25.00 0038 MOVJ VJ=25.00 0039 ARCON AC=166 AV=18.0 T=0.20 V=22 RETRY REPLAY 0040 WVON WEV# (11) 0041 MOVL 0042 WVOF 0043 ARCOF AC=165 AV=19.0 0044 MOVJ VJ=25.00 0045 MOVJ VJ=25.00 0046 MOVJ VJ=25.00 0047 PULSE OT# (10) // DESACTIVAR AIRE 0048 MOVJ VJ=25.00 0049 WAIT IN# (6) =OFF //LLAMAR MESA 4 0050 END 4.7.5 PROGRAMA MESA 5 0000 NOP 0001 MOVJ VJ=25.00 0002 PULSE OT# (8) // ABRIR CLAMP 0003 MOVJ VJ=25.00 0004 MOVJ VJ=25.00 53 0005 ARCON AC=142 AV=18.5 T=0.10 V=20 RETRY REPLAY 0006 WVON WEV# (12) 0007 MOVL 0006 MOVL 0009 MOVL 0010 MOVL 0011 MOVL 0012 WVOF 0013 ARCOF AC=160 AV=18.8 ANTSTK 0014 MOVJ VJ=25.00 0015 MOVJ VJ=25.00 0016 PULSE OT# (7) // CIERRA CLAMP IZQ. 0017 WAIT IN# (8) =ON // LLAMAR MESA 5 0018 MOVJ VJ=25.00 0019 MOVJ VJ=25.00 0020 MOVJ VJ=25.00 0021 ARCON AC=170 AV=17.5 T=0.01 V=20 RETRY REPLAY 0022 MOVL V=25 0023 MOVC 0024 MOVC 0025 MOVC 0026 ARCOF 0027 MOVJ VJ=25.00 0028 MOVJ VJ=25.00 0029 ARCON AC=145 AV=17.0 T=0.01 V=22 RETRY REPLAY 0030 MOVL 54 0031 WVOF 0032 ARCOF AC=160 AV=18.5 ANTSTK 0033 MOVJ VJ=25.00 0034 MOVJ VJ=25.00 0035 MOVJ VJ=25.00 0036 MOVJ VJ=25.00 0037 ARCON AC=155 AV=17.0 T=0.10 V=28 RETRY REPLAY 0038 MOVL 0039 WVOF 0040 ARCOF AC=160 AV=18.0 ANTSTK 0041 MOVJ VJ=25.00 0042 MOVJ VJ=25.00 0043 PULSE OT# (8) // CIERRA CLAMP IZQ. 0044 WAIT IN# (8) =OFF // LLAMAR MESA 5 0045 RET 0046 END. En el capitulo 4.8 se presentan los cinco programas del Plc uno para cada mesa de trabajo. Las mesas de trabajo tienen una secuencia lógica, el primer paso debe estar en condiciones iníciales, las cuales son que la pieza este presente, y los clamps estén abiertos, una vez que se cumplió ese paso, el siguiente es oprimir el botón de inicio para que las válvulas se activen y se cierren, ya cumplida esta condición el Plc le manda una señal al robot para que inicie el trabajo, al finalizar el trabajo el robot le manda al Plc el fin de ciclo, el siguiente paso es que los clamps se abran para poder retirar las piezas ya ensamblada, los sensores de presencia indican al Plc que las piezas han sido retiradas, para que así la secuencia vuelva a las condiciones iníciales. 55 Diagrama de flujo del controlador lógico programable Condiciones iniciales Inicio de ciclo Secuenciador Paso 1 Paso 2 Paso 3 Llamado de robot Se inicia Proceso Fin de ciclo 56 4.8 PROGRAMACION DEL CONTROLADOR LOGICO PROGRAMABLE (PLC) 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 4.8.1. INSTRUCCIONES UTILIZADAS EN EL PROGRAMA. INSTRUCCIÓN MOV. Fig.4.12 Instrucción de Movimiento en el programa logix 500 Descripción: Cuando las condiciones del renglón que precede a esta instrucción son verdaderas, la instrucción MOV mueve una copia del origen al destino en cada escaneo. El valor original permanece intacto y sin cambio en su ubicación origen. Origen es la dirección de los datos que desea transferir. El origen puede ser una constante.Destino es la dirección que identifica el lugar al que se van a transferir los datos. Nota: Si desea mover una palabra de datos sin afectar los indicadores matemáticos, use una instrucción Copiar (COP) con una longitud de 1 palabra en lugar de la instrucción MOV. En la fig. 4.12 se muestra como aparece la instrucción en el programa rs logix 500 INSTRUCCIÓN TEMPORIZADOR. Fig. 4.13 Instrucción de un temporizador en logix 500 81 Descripción La instrucción TON se utiliza para activar o desactivar una salida después que el temporizador ha estado activo durante un intervalo de tiempo preseleccionado. Esta instrucción de salida comienza la temporización (a intervalos de un segundo o de una centésima de segundo) cuando el renglón es "verdadero." Espera la cantidad de tiempo especificado (según lo establecido en PRESEL), mantiene control de los intervalos acumulados que ocurrieron (ACUM) y establece el bit DN (terminado) cuando el tiempo ACUM (acumulado) es igual al tiempo PRESEL. Mientas las condiciones del renglón permanecen verdaderas, el temporizador ajusta el valor acumulado (ACUM) en cada evaluación hasta que alcanza el valor preseleccionado (PRESEL). El valor acumulado se restablece cuando las condiciones del renglón pasan a ser falsas, sin importar si el temporizador ha sobrepasado el tiempo de espera. Bits de la instrucción: 13 = DN (efectuado) 14 = TT (bit de temporización del temporizador) 15 = EN (bit de habilitación) Si se pierde la alimentación eléctrica mientras una instrucción TON está temporizando pero no ha alcanzado su valor preseleccionado, los bits EN y TT permanecen establecidos y el valor acumulado (ACUM) permanece igual. Esto también es cierto si el procesador cambia del modo Marcha remota o Prueba remota al modo Programa remoto. Nota: Si el renglón se hace "falso" (pierde continuidad lógica) durante el proceso de temporización, se restablece el valor acumulado y se restablecen los bits DN, EN y TT independientemente de si el temporizador llegó al valor PRESEL. La temporización podría ser inexacta si las instrucciones JMP, LBL, JSR, o SBR se saltan el renglón que contiene una instrucción de temporización mientras el temporizador está temporizando. Ayuda para direccionamiento: Se debe introducir una dirección de TEMPORIZADOR, BASE DE TIEMPO, valor PRESELECCIONADO y valor ACUM (acumulado). Los archivos de temporizador usan tres palabras por elemento, una para los bits de la instrucción (la palabra de control), una para el valor preseleccionado y una para el acumulador.T4:1 representa el archivo de temporizador número cuatro, número de elemento 1. En la fig. 4.13 Se muestra como aparece la instrucción del temporizador en el programa Rs logix 500. 82 INSTRUCCION BSL. Descripción: Las instrucciones de desplazamiento de bits desplazan todos los bits dentro de la dirección especificada, una posición de bit, con cada transición de renglón de falso a verdadero. Estas instrucciones son: Desplazamiento de bit izquierda (BSL) Introducción de los parámetros Para programar una instrucción de desplazamiento de bit, se necesita proporcionar la siguiente información al procesador: Parámetro y su definición: File: la dirección del conjunto de bits que se desea manipular. Usted debe empezar el conjunto en un límite de palabra de 16 bits. Por ejemplo, use el bit 0 del número de palabra 1, 2, 3, etc. Se puede terminar el conjunto en cualquier número de bit hasta el 15,999. Sin embargo, no se pueden usar los bits restantes en ese elemento particular porque la instrucción los invalida. Control: La dirección de la estructura de control (48 bits - tres palabras de 16 bits) en el área de control (R) de la memoria, que almacena los bits de estado de la instrucción, el tamaño del conjunto (número de bits), y el señalador de bit. Position: la posición actual del bit a la cual apunta la instrucción. Introduzca un valor sólo si desea que la instrucción empiece en un valor concurrente de desplazamiento, con un desplazamiento de archivo de control para una exploración. Use la dirección de control con un nemónico, cuando direccione este parámetro. Bit Address: la dirección del bit fuente. La instrucción introduce el estado de este bit ya Sea en la primera posición del bit (la más baja) (para la instrucción BSL), o en la última (la más alta) posición del bit (para la instrucción BSR), en el conjunto. Length: el número decimal de bits que van a ser desplazados. Recuerde que los bits En los archivos de E/S están numerados en octal 00-17, pero los bits en todos los otros archivos están numerados en formato decimal 0-15. Use la dirección de control con nemónico cuando direccione este parámetro. 83 CONCLUSIONES. El proyecto antes presentado ayudó a conocer más ampliamente una de las áreas de la aplicación de la robótica industrial, tomando en cuenta que la automatización y el control de cualquier proceso en la actualidad es uno de los grandes retos para la ingeniería, ya que con lo cambiante que resulta la tecnología, cada día se irán implementando mas automatismos aun más complejos, tal es el caso de la soldadura MIG que surgió a raíz de reducir tiempos de ensamble que se realizaban manualmente, con la integración de este proyecto el proceso se mejoró enormemente. En la actualidad este proceso de soldadura MIG es el proceso predominante en las plantas ensambladoras del mundo. Ya que aparte de reducir tiempos y costos evita que el ser humano se exponga a realizar trabajo en las cuales podría sufrir un daño. El ingeniero en robótica industrial tiene la capacidad de adaptar nuevas tecnologías automatizándolas y controlándolas para el mejoramiento de los procesos industriales y mediante la actualización de nuevas tecnologías podremos realizar proyectos de vanguardia. Por la importancia que tiene la robótica industrial en la actualidad y en los años venideros, es por ello, que día con día tendremos que estar capacitándonos para enfrentar las nuevas tecnologías y continuar ayudando a la industria, en automatizar y controlar los procesos y desde luego adecuarnos a las necesidades de la planta. Como se menciona anteriormente la soldadura MIG ocupa un lugar especial en el ensamble de la industria automotriz, así que por un buen tiempo seguirá siendo este tipo de soldadura en especial, inspiración de investigación y de mejoras para los procesos de ensamble. 84 BIBLIOGRAFIA. 1.- FUNDAMENTOS DE ROBOTICA. ANTONIO BARRIENTOS, LUIS FELIPE PEÑIN, CARLOS BALAGUER Y RAFAEL ARACIL EDITORIAL MCGRAW-HILL INTERAMERICANA, ESPAÑA. 2ª. EDICION. 2007. 2.- AUTÓMATAS Y ROBÓTICA. MARCIAL CARROBLES MAESO. EDITORIAL CULTURAL S, A. ESPAÑA 1ª EDICION 2005. 3.- SOLDADURA DE ARCO METALICO CON PROTECCION DE GAS AUTOR: MASSIMO VLADIMIRO PIREDDA EDITORIAL: LIMUSA 4.- FESTO FESTO AG Y CO. AGOSTO DE 2001. MEXICO D.F. EDICION 03/01. 5. - MANUAL DE MANTENIMIENTO ROBOT SSA2000. MOTOMAN ROBOTICS A YASKAWA COMPANY. 805 LIBERTY LANE, WEST CARROLLTON. OH. 2008. 85 INTEGRACIÓN DE UN ROBOT EN UNA LÍNEA DE PRODUCCIÓN AUTOMOTRIZ APLICANDO SOLDADURA MIG. Definición de robot Es un manipulador multifuncional con varios grados de libertad, capaz de manipular cargas, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas. Un robot industrial esta constituido de dos sistemas principales a. b. El primer sistema es el manipulador lo constituyen las partes móviles: el brazo y la muñeca El segundo sistema, es el de control, desde el se procesa la información necesaria para gobernar el movimiento del manipulador 86 Estructura de un robot Un robot esta formado por engranes bandas dentadas , servomotores, sensores, encoder, por mencionar algunas de ellas. Encoder Es un codificador rotatorio, suele ser un dispositivo electromecánico usado para convertir la posición angular de un eje a un código digital. Estos dispositivos se utilizan en robótica Servomotor Un servomotor es un dispositivo actuador que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y de mantenerse estable en dicha posición. Está formado por un motor de corriente continua, una caja reductora y un circuito de control. CONTROLADOR DEL ROBOT NX100 Es el elemento que controla al robot. Un elemento indispensable es el teach pendant ya que este es el enlace entre la maquina y el hombre por medio de este se realizan los movimientos del robot así como toda la programación de las trayectorias, entradas y salidas para controlar la secuencia del robot. 87 SOLDADURA MIG MIG (Metal Inerte Gas) utiliza un gas inerte Argón, Helio o una mezcla de ambos. Se emplea sobre todo para soldar aceros inoxidables, cobre, aluminio, chapas galvanizadas y aleaciones ligeras 1 2 3 4 5 6 7 Antorcha Tubo de contacto Electrodo Gas Metal derretido de soldadura Metal de soldadura solidificado Pieza a soldar ELEMENTOS UTILAZADOS EN LA SOLDADURA MIG Maquina de soldadura MILLER Características: modelo deltaweld 452 Cv, dc welding power source, Entrada de voltaje 230,460,575v a tres faces Salida 38v 450 amp Tanque de gas CO₂ (Dióxido de Carbono) La principal función del gas de protección es aislar tanto el electrodo como el baño de fusión del contacto con gases de la atmosfera circundante. 88 ALIMENTADOR DE MICROALAMBRE El robot Motoman modelo SSA2000 Esta diseñado para la aplicación de soldadura MIG ( Metal Gas Inerte) Por consecuencia ya tiene integrado de fabrica el alimentador del microalambre el cual esta controlado directamente por el robot , cuando al robot se le da la instrucción de soldar por medio de una salida análoga se controla el avance y la velocidad del microalambre. DISPOSITIVOS DE SUJECION Las mesas de trabajo tiene una función muy importante en el proceso, tiene como finalidad asegurar que la posición de las piezas siempre será la misma. La sujeción de los componentes es por medio de clamps, controlados por cilindros neumáticos y válvulas. El enlace entre la mesa de trabajo y el robot es por medio de Plc (controlador lógico programable) utilizando las entradas y salidas del robot. 89 LIMPIADOR DE BOQUILLAS Como su nombre lo dice este dispositivo tiene como objetivo retirar la escoria acumulada en la boquilla. Por medio de un bit (digito binario) al robot se le puede programar cada cuantos ciclos sale del trabajo , para hacer la autolimpieza. Para la autolimpieza, el robot ya tiene la trayectoria grabada , llega a la posición donde se sujeta la boquilla, unas aspas giran para retirar la escoria y con aire comprimido se le aplica un silicón antiadherente para proteger la boquilla . POSICION HOME DEL ROBOT Una vez conectado el robot, lo primero que se debe de hacer es llevar a la posición de home verificar que todos los ejes estén en ceros, si llega a existir alguna variación , el robot tiene en cada eje unas marcas indicando la posición de cero, se mueve el robot hasta esta marca y se realiza la masterizacion del robot. Cual es el objetivo de esto, en ocasiones cuando llega a fallar la energía eléctrica y el robot se encuentra energizado los encoders suelen perder posición, por consecuencia el robot necesita que lo lleves a home para verificar su posición. 90 TCP (punto central de la herramienta) El punto central de la herramienta tiene la finalidad de proporcionarle al robot las dimensiones del dispositivo, para reprogramar los limites de los movimientos del robot y así evitar que se golpe contra el cuerpo del robot, otra característica es para facilitar los movimientos en la programación. En el robot SSA2000 se pueden seleccionar 5 herramientas. PROGRAMACIÓN EN EL TEACH PENDANT Para programar una rutina del robot motoman SSA2000. Se inicia un nuevo proyecto en el teach pendant en la opción de datos se selecciona nuevo trabajo se le asigna un nombre, se mueve el robot a la primer posición, se selecciona un movimiento el cual puede ser lineal, circular, se inserta al programa y se guarda la trayectoria, se mueve el robot al siguiente paso se inserta el otro movimiento y así las veces que se han necesarias para generar una rutina de trabajo. 91 Programación del robot Para realizar un programa en el robot se hace a pie de maquina por medio de una secuencia, grabando paso por paso la trayectoria deseada, utilizando las diferentes modalidades del robot como son movimiento lineal, circular o trabajo de acuerdo a la dificultad del movimiento, una vez grabada la trayectoria del robot se le insertan al programa las instrucciones de soldadura esto se hace por medio de salidas analógicas. Programación a pie de maquina La forma mas común es programar a pie de maquina para verificar movimientos, velocidades y ajustes finos, no es la única ya que también se puede a través de un software en la computadora, pero a un así se tienen que hacer pequeños ajustes. 92 Programación del plc (controlador lógico programable) En la programación se utiliza un plc de la marca Allen Bradley modelo scl 500. Se utiliza el método de diagramas de escaleras. La base de este programa es un secuenciador, su función es que se deben de cumplir el primer paso para que el secuenciador continúe, los pasos de este programa son los siguientes: Paso 1: debe de estar en condiciones iniciales que son que los clamps estén abiertos, que haya piezas en la mesa de trabajo. Paso 2: presionar el botón de inicio de ciclo. Paso 3: Se activan las salidas que en este caso son las válvulas neumáticas que accionan el mecanismo de los clamp para sujetar la pieza. Paso 4: En el programa del robot hay una espera de inicio de ciclo, que por medio del plc le llega la señal para iniciar el trabajo. Paso 5: por medio del programa del robot se le envía la señal al plc que el trabajo a finalizado. Paso 6: se abren los clamps para poder retirar las piezas. Paso 7: por medio de sensores de presencia se garantiza que la pieza sea retirada esto con el objetivo de que no se soldé la misma pieza dos veces Paso 8: El secuenciador regresa a condiciones iniciales 93 Pieza soldada por el robot Esta pieza es el refuerzo para la conducción de una camioneta, esta se ensambla en la planta de Chrysler Toluca. En la imagen se muestran los componentes y la pieza terminada Ensamble de pieza En las imágenes se muestra la pieza ensamblada por el robot y la ubicación en la camioneta. 94 95 96


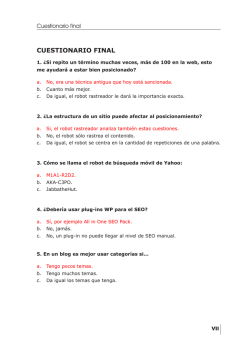
© Copyright 2026