
Radar Primario de Vigilancia (PSR)
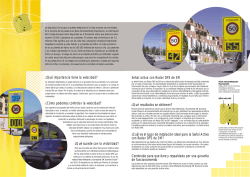
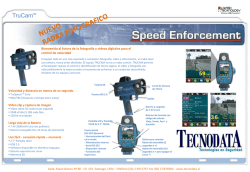
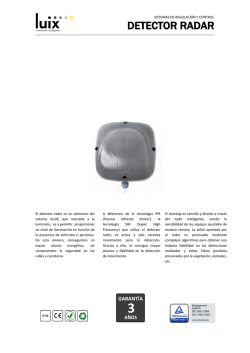
Radar Primario de Vigilancia (PSR) 1. Introducción En 1887 el físico Alemán Heinrich Hertz descubrió las ondas electromagnéticas y demostró que tienen las mismas propiedades de las ondas de luz. A comienzo de los años 1900s, Telsa en los Estados Unidos y Hülsmeyer en Alemania propusieron la detección de objetos usando las ondas electromagnéticas. El principio del RADAR (Radio Detection And Ranging), se basa en la propagación de estas ondas. El Radar se desarrolló durante la Segunda Guerra Mundial, especialmente en Inglaterra y Alemania como la técnica ideal para detectar al enemigo. 2. Principios Básicos El Radar es un sistema que transmite ondas electromagnéticas en distintas direcciones y que al ser reflejadas por un determinado objeto, son detectadas para determinar la posición de ese objeto. En el diagrama simplificado del Radar de la figura 1, el transmisor genera una señal que es llevada a la antena a través del circulador. Este elemento se usa en casos donde la antena es común para la transmisión y recepción. El circulador solo permite el paso de señal en el sentido indicado, es decir de 1 a 2 y de 2 a 3. Esto evita que la señal del transmisor vaya directamente al receptor (de 1 a 3). La señal es emitida al espacio y si hay objetos móviles (aeronaves) en un determinado rango, esta señal es reflejada de vuelta a la antena y pasa de nuevo a través del circulador hacia el receptor. Allí la señal es detectada y de acuerdo con el método de medida se determina la posición del objeto, la cual se presenta en el display. Fig. 1. Circuito básico del Radar La potencia de los radares primarios varía de 10 a 100 Kw, con un alcance de 80 a 100 millas náuticas. La frecuencia varía de 1 y 3 GHz de acuerdo con el modo de operación y la polarización es circular. 3. Rango de Medida Si la transmisión de Radar es una onda continua, con frecuencia f0, la señal reflejada tendrá la misma frecuencia (si la velocidad relativa entre el radar y el objeto es igual a cero). Sin embargo cuanto mayor la distancia del objeto y cuanto menor su tamaño, la señal reflejada será más débil. 1 La distancia al objeto se puede obtener por medio de uno de los siguientes métodos: • • Mediante el cálculo del tiempo entre el eco del objeto detectado y la señal trasmitida. Mediante el cálculo de la diferencia en frecuencia entre el eco recibido y la señal transmitida, en el caso de modulación lineal en frecuencia. 3.1 Medida del tiempo Para obtener la distancia al objeto por medio del cálculo de tiempo entre la señal transmitida y el eco detectado, el radar debe emitir pulsos cortos como se muestra en la figura 2. Fig. 2. Modulación de pulso. El radar que usa este tipo de transmisión se denomina radar de pulso. El transmite periódicamente pulsos con potencia pico Pt, el tiempo entre pulsos se denomina periodo TR. El tiempo que tarda el pulso en regresar to determina la distancia R al objeto mediante la siguiente fórmula: R= c ⋅ to 2 Donde c es la velocidad de propagación de las ondas electromagnéticas. Se divide por 2 ya que to es el tiempo de propagación de la onda en el camino recorrido desde el radar hasta el objeto y de vuelta al radar. 3.2 Medida del cambio de frecuencia Para obtener la distancia al objeto por este método, la transmisión debe ser linealmente modulada en frecuencia (ver figura 3). Ignorando el efecto Doppler, la distancia entre el radar y el objeto está dada por: R = c⋅ TR ∆f ⋅ 2 fm Donde: fm = frecuencia máxima de modulación ∆f = diferencia entre las frecuencias de transmisión y recepción 2 c·TR/2= Rango de Distancia sin ambigüedad Por ejemplo: Si TR = 100µs y ∆f = 0.2 fm , tendríamos: R = 3 km. Fig. 3. Modulación de pulso. Radar Secundario de Vigilancia (SSR) A diferencia del radar primario donde el objeto es pasivo, y es detectado por reflexión de la señal enviada por el radar, con el radar secundario el objeto juega un papel activo en el proceso de detección, capturando la interrogación y devolviéndola con información de respuesta. Esto tiene 4 efectos importantes: 1. No se requieren potencias de pico tan elevadas (es suficiente con potencias pico del orden de 1 kilovatio) 2. El receptor no requiere sensibilidades tan grandes (basta con unos -87 dBm). 3. Puede intercambiarse información entre los equipos de tierra (interrogación) y en vuelo (transponder). 4. La diferencia entre las frecuencias de interrogación y de respuesta evita la presencia de las señales provenientes de blanco pasivos indeseados. Fig. 4. Sistema SSR 3 Los dos primeros aspectos, hacen que, desde el punto de vista tecnológico, el SSR no sea tan complejo, mientras el tercero abre la vía para establecer un enlace de datos con fines distintos a la detección, entre el centro de control y la aeronave. El cuarto aspecto mejora la protección a interferencias. La desventaja es que es necesario que la aeronave coopere activamente en el proceso, de forma que la inoperatividad del transponder a bordo implica la no detección de esa aeronave. Como se puede observar en la figura 4 el SSR es similar al DME, con los papeles de interrogación y respuesta invertidos. En este caso el equipo de tierra, produce interrogaciones codificadas por la separación entre pulsos Ti ,(ver tabla 1), utilizando una frecuencia de portadora común para todos los equipos de tierra de fo = 1030 MHz, modulada en pulsos de ancho de 0.8 µs. La separación entre los dos pulsos de interrogación determina el modo o el tipo de información que es requerida al equipo a bordo. MODO APLICACION FUNCION TIEMPO TI ENTRE P1 Y P3 1 Militar IFF 3 µs 2 Militar IFF 5 µs 3/A Militar / Civil Identificación 8 µs B Civil Identificación 17 µs C Civil Altitud 21 µs D Civil No asignada 25 µs S Civil Otros datos 16 µs Tabla 1. modos del Sistema SSR Los pulsos de interrogación se denominan P1 y P3 y se radian a través de una antena directiva, mientras que un tercer pulso no mostrado en la figura, denominado P2 , se emite 2 µs después que el pulso P1 y se radia de forma omnidireccional para la cancelación de respuestas producidas por lóbulos laterales. Fig. 5. Formato de la señal de respuesta del SSR El formato de respuesta utiliza una portadora de 1090 MHz y está constituido por: - 2 pulsos de encuadramiento del mensaje (F1 y F2). - Hasta 12 pulsos de información binaria. 4 - 1 pulso de identificación (SPI). La posición central, denominada (X), es siempre 0 y fue ideado para futuras aplicaciones del formato de respuesta. La configuración temporal de estos se representa en la figura 5. Para el ejemplo dado el código corresponde a: 1 1 0 0 1 0 1 0 0 1 1 1 = (6247)8 A4 A2 A1 B4 B2 B1 C4 C2 C1 D4 D2 D1 Los 12 bits de información correspondientes a los pulsos dentro del encuadramiento formado por F1 y F2 pueden adoptar 212 = 4096 valores distintos. Durante el plan de vuelo el controlador asigna uno de estos 4096 códigos para que el piloto lo seleccione en su transpondedor a bordo y de esta manera en la pantalla radar del centro o torre de control se identifique todo el tiempo. Fig. 6. Foto de un transpondedor a bordo Sin embargo existen unos códigos reservados para situaciones anormales como por ejemplo: 7500 – El vuelo está siendo secuestrado 7600 – Fallo en las comunicaciones 7700 – La situación se presenta deseperada Normalmente en el control de tráfico aéreo se emplean los modos de interrogación 3/A que es sólo identificación y C que además envía datos de altitud. Estos son los dos modos convencionales de ATC. El modo S incrementa el intercambio de información entre la estación terrestre y el transpondedor, ya que permite enviar y recibir paquetes de datos en general entre la estación radar y las aeronaves, llegando incluso a la posibilidad de establecer un enlace de datos. Su principal característica es que permite la interrogación selectiva, evitando así la saturación del espacio radioeléctrico. El sistema puede elegir a que aeronave interrogar usando su Dirección Modo S, y evitando que el resto de traspondedores que reciben la interrogación respondan. En la figura 6 se puede observar un sistema de radar en tierra primario y secundario, La antena con forma de parábola es la del radar primario y la rectangular ubicada en la parte superior corresponde al radar secundario. 5 Fig. 7. Antenas de Radar Primario (inferior) y Radar Secundario (superior) 6
© Copyright 2026