
Informe preTFG Marzo - Universidad Politécnica de Madrid
ETSIDI
universidad politécnica de madrid
Informe pre-TFG
Protocolos de adquisición de imágenes
Métodos de registro no rı́gido
José Marı́a Sanz Sanz
Marzo 2015
Índice
1. Introducción y objetivos
1.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3. Resumen del informe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3
3
3
2. Estado de la técnica
2.1. Protocolos de adquisición de imágenes . . . . . .
2.1.1. ADNI (Alzheimer’s Disease Neuroimaging
2.1.2. Harmonized Hippocampal Protocol . . . .
2.2. Registro no rı́gido . . . . . . . . . . . . . . . . . .
2.2.1. elastix toolbox . . . . . . . . . . . . .
2.2.2. ANTs . . . . . . . . . . . . . . . . . . . .
2.2.3. Patch-labeling . . . . . . . . . . . . . . .
4
4
4
6
7
8
8
9
3. Localización de
3.1. Objetivo . .
3.2. Metodologı́a
3.3. Resultados .
atlas para
. . . . . . .
. . . . . . .
. . . . . . .
. . . . . .
Initiative)
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
AD
12
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4. Técnicas de patch-labeling
14
4.1. Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.2. Metodologı́a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.3. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5. Desarrollos futuros
17
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
1.
1.1.
Introducción y objetivos
Introducción
Actualmente, las enfermedades neurodegenerativas se sitúan como uno de los grandes desafı́os de la sociedad.
Enfermedades como el Alzheimer o la esquizofrenia son cada vez más comunes, y sus efectos son devastadores para
aquellos que las sufren. A dı́a de hoy, el método más eficaz para lidiar con este tipo de enfermedades pasa por un
diagnóstico precoz que detecte la enfermedad en sus primeras fases de desarrollo.
Se ha comprobado que la obtención de bio-marcadores asociados a la volumetrı́a y morfologı́a del hipocampo es
una ayuda fundamental a la temprana detección de enfermedades neurodegenerativas, en las que la atrofia del
hipocampo permite determinar el avance de la enfermedad.
Sin embargo, el proceso de segmentación del hipocampo para obtener la volumetrı́a y la morfologı́a es muy largo y
complejo para que un radiólogo lo lleve a cabo de forma manual. Por este motivo, en los últimos años se está llevando
a cabo una intensa labor de automatización de este proceso para poder realizarlo de forma rápida y eficaz con un
ordenador.
El proceso de segmentación automatizada requiere del uso de una base de imágenes de resonancia magnética en las
que la región a localizar ha sido previamente segmentada por segmentación manual. A estas imágenes se las conoce
como atlas. Los atlas pueden pasar por una etapa de preprocesamiento en la que se lleve a cabo la eliminación
de la imagen el cráneo y todos aquellos elementos que no formen parte del cerebro (skull-stripping), ası́ como la
corrección del sesgo magnético que provoca faltas de homogeneidad en las imágenes (bias correction).
Posteriormente, los atlas de la base de imágenes son registrados a la imagen paciente que hay que segmentar
utilizando alguna de las metodologı́as de registro disponibles. De esta forma, obtenemos varios etiquetados para la
imagen paciente, cada uno producido por el registro de un atlas. Finalmente, se realiza un proceso de fusión de los
etiquetados en los que se pone en común la información de cada etiquetado para obtener la segmentación definitiva
de la imagen paciente. Una vez obtenida la segmentación definitiva del hipocampo, es sencillo contar el número de
vóxeles de que consta y multiplicar por el tamaño del vóxel (Spacing) para calcular el volumen del hipocampo.
Como se puede ver, el proceso es muy complejo, por lo que se divide en varias etapas que se pueden mejorar de
forma individual. En este informe nos centraremos en la adquisición de una base de atlas completa que nos permita
probar diferentes algoritmos y en la etapa del registro de los atlas.
1.2.
Objetivos
El principal objetivo de este Proyecto Fin de Grado es la implementación de técnicas de fusión de etiquetas basadas
en la combinación de patches y registro no rı́gido. Este proyecto está dentro del marco de las técnicas de segmentación
de subestructuras corticales desde imágenes T1-MRI. La segmentación de imágenes se basa en el registro de los
atlas sobre la imagen paciente.
Se implementarán las técnicas de fusión de etiquetas empleando patches de forma convencional y mediante combinación de los patches con métodos de fusión basados en registro no rı́gido.
Por otra parte, se llevará a cabo un estudio de los protocolos de adquisición de imágenes procedentes de resonancia
magnética, ası́ como una búsqueda de atlas para su posterior uso en otros algoritmos.
1.3.
Resumen del informe
El presente informe se ha estructurado en cinco capı́tulos.
En el capı́tulo 1 se ha realizado una introducción al tema de la segmentación de imágenes del hipocampo con idea
de exponer el objetivo final de la investigación y los motivos por los que se lleva a cabo.
En el capı́tulo 2 se presentan los principales avances en técnicas y algoritmos relacionados con la adquisición de
imágenes de resonancia magnética y con las técnicas de registro no rı́gido.
En el capı́tulo 3 se trata la localización y adquisición de atlas con el objetivo de conseguir una base de atlas más
completa que las actualmente disponibles para poder probar con ellos los nuevos algoritmos desarrollados.
En el capı́tulo 4 se presenta la técnica de patch-labeling propuesta, ası́ como las mejoras que se han aplicado para
incrementar su eficiencia.
El capı́tulo 5 expone las conclusiones a las que se ha llegado ası́ como los próximos pasos que se van a dar en la
elaboración del Proyecto Fin de Grado.
ETSIDI - UPM
3
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
2.
2.1.
Estado de la técnica
Protocolos de adquisición de imágenes
Ya hemos visto que la segmentación del hipocampo es de vital importancia en el diagnóstico de enfermedades
neurodegenerativas como la enfermedad de Alzheimer (AD) y que es necesario contar con una base de atlas cuyas
segmentaciones se hayan hecho manualmente.
A la hora de hacer estas segmentaciones surge un nuevo problema, que es cómo se define el hipocampo in vivo.
Según las estructuras que se incluyan en la segmentación manual del hipocampo, los resultados de la volumetrı́a
del paciente pueden variar considerablemente, dando lugar a distintos diagnósticos según la definición tomada.
Existen diversos protocolos de definición del hipocampo y de las estructuras que se consideran en su segmentación.
Nestor et al. [1] llevaron a cabo una comparación entre cinco protocolos de adquisición de imágenes, realizando
segmentaciones manuales con todos ellos y comparando los resultados de segmentar una imagen paciente con las
bases de atlas de cada protocolo. Los protocolos utilizados fueron: Haller et al. (P1), Killiany et al. (P2), Malykhin
et al. (P3), Pruessner et al. (P4) y Pantel et al. (P5).
El experimento se realizó un método de validación leave-one-out en el que se segmenta una imagen procedente de
la base de atlas utilizando el resto de atlas y se compara el etiquetado obtenido con la segmentación auténtica
correspondiente a la imagen (ground-truth).
Los resultados obtenidos demostraron que se obtenı́an mejores valores del coeficiente de similitud DICE utilizando
los protocolos más inclusivos, en concreto P3, P4 y P5, que incluyen gran parte de la cola del hipocampo, el alveus
y la fimbria. Los valores de similitud obtenidos con estos protocolos llegan a 0.88, mientras que los otros protocolos
alcanzaban valores de 0.86 (P2) y 0.85 (P1).
Además de los cinco protocolos estudiados por Nestor et al. [1], existen muchas otras metodologı́as de obtención de
los atlas, pudiendo variar no sólo las estructuras consideradas, sino también el espacio en el que están registradas
las imágenes, la intensidad de campo utilizada en la resonancia o el tamaño de los vóxeles de la imagen. En estos
casos, es posible aplicar transformaciones a las imágenes para adaptarnos a un protocolo determinado, pero hay
que tener estos datos muy en cuenta para llegar a obtener el diagnóstico correcto para la imagen paciente.
Como consecuencia, actualmente hay varias iniciativas en desarrollo cuyo objetivo es unificar los protocolos de
adquisición y segmentación de imágenes para conseguir establecer bases de atlas más robustas. En concreto, para la
enfermedad de Alzheimer, las iniciativas más importantes son ADNI y el Protocolo Armonizado para el Hipocampo
(HarP).
2.1.1.
ADNI (Alzheimer’s Disease Neuroimaging Initiative)
ADNI es una iniciativa consistente en un amplio estudio observacional de pacientes de más de 50 años, con diagnósticos desde saludable (“Normal”) hasta enfermo de Alzheimer (“AD”), pasando por deterioro cognitivo leve (Mild
Cognitive Impairment, MCI). ADNI incluye datos en varios formatos, incluyendo MRI, PET y biomarcadores de
CSF (Fluido cerebroespinal).
El objetivo de ADNI es crear una gran base de datos variados relativos al cerebro para poder utilizarlos en estudios
posteriores, tales como la segmentación del hipocampo que tratamos en este informe.
Como ya hemos visto en Nestor et al. [1], la definición de los protocolos de segmentación resulta vital para poder
interpretar adecuadamente los datos y obtener los resultados correctos. Ocurre exactamente lo mismo en la adquisición de las imágenes, por lo que en Jack et al. [2] se ha definido un protocolo especı́fico para la toma de datos. En
concreto, para la adquisición de imágenes de MRI, las especificaciones son las siguientes:
1. Las imágenes MRI de ADNI deben ser consistentes a lo largo del tiempo, consiguiendo caracterı́sticas similares
para todas las imágenes.
2. Las imágenes deben ser tomadas con un aparato de resonancia de GE Healthcare, Philips Medical Systems o
Siemens Medical Solutions y que haya sido aprobado por ADNI.
3. Se permite la modificación de la secuencia de pulsos de una máquina, pero sólo si beneficia al proyecto.
4. Las imágenes deben ser de tipo T1. Es deseable pero no imprescindible que los vóxeles sean isotrópicos para
reducir el sesgo direccional. El volumen aproximado del vóxel es de 1mm3.
5. Se debe adquirir todo el cerebro.
6. El tiempo de adquisición no será superior a 10 minutos.
ETSIDI - UPM
4
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
7. Es preferible mejorar otros campos antes que reducir el tiempo de adquisición.
8. Con un campo de 3T, el ratio señal-ruido (SNR) se utiliza para incrementar la resolución espacial y compensar
la rápida variación de la susceptibilidad con 3T.
9. Las imágenes T1 deben poder utilizarse con métodos y algoritmos que ya se hayan empleado.
10. Se deben incluir phantoms para monitorizar y calibrar el aparato. De hecho, se aplica el phantom después de
cada resonancia.
11. Se implementará la post-corrección de las imágenes siempre que sea necesario.
Las principales opciones para la adquisición fueron: magnetization prepared rapid gradient echo (MP-RAGE) y
spoiled gradient echo (SPGR) o similares. Sin embargo, rápidamente se comprobó que MP-RAGE producı́a los
mejores resultados, por lo que se adoptó como parte del protocolo de adquisición. Finalmente, las fases del protocolo
de ADNI son:
1. Procedimiento de escaneado previo determinado por el fabricante del equipo.
2. Adquisición de la imagen 3D MP-RAGE sagital.
3. Repetición de la imagen 3D MP-RAGE sagital.
4. Calibración B1 sagital (phased array)
5. Calibración B1 sagital (bobina para el cuerpo)
6. Contraste dual FSE/TSE para detección de patologı́as
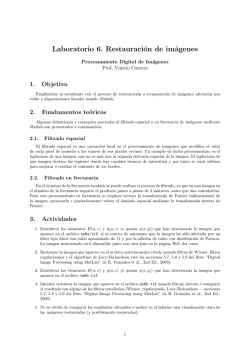
Actualmente, ADNI cuenta con una gran base de imágenes MRI utilizadas en múltiples estudios y proyectos de
imagen médica gracias a su versatilidad y consistencia. En la imagen 1 podemos ver la distribución de pacientes
por sexo y edad, estando la mayorı́a entre los 70 y los 80 años.
Figura 1: Distribución de pacientes de ADNI por edad y sexo
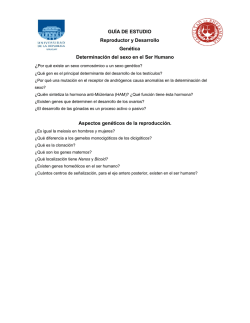
Como ya hemos comentado, los pacientes de ADNI presentan una amplia variedad de diagnósticos, desde los sujetos
saludables hasta los enfermos de Alzheimer. En la imagen 2 podemos ver los distintos tipos de diagnóstico: “CN”,
“SMC”, “EMCI”, “MCI”, “LMCI” y “AD”. En la figura 3 podemos ver la distribución de los pacientes por edades
ETSIDI - UPM
5
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
y por diagnóstico. En el gráfico de la derecha tenemos el número de sujetos para cada tipo de diagnóstico (puesto
que el SMC es bastante reciente y aún no tiene demasiada representación se ha omitido en los gráficos), mientras
que en el de la derecha podemos ver la distribución de las etapas de la enfermedad por edades.
Figura 2: Diagnósticos de los pacientes de ADNI
Figura 3: Distribución por edades y por diagnóstico de los pacientes de ADNI
2.1.2.
Harmonized Hippocampal Protocol
En la misma lı́nea de trabajo que Nestor et al. [1], el Consorcio Europeo de Enfermedad de Alzheimer (EADC),
investigadores de ADNI y la Alzheimer’s Association comienzan a trabajar en el desarrollo de un protocolo armonizado para la segmentación manual de imágenes de resonancia magnética, en concreto imágenes T1-MRI. Para ello
se pretende llegar a acuerdo en la delimitación del hipocampo y en la forma de segmentarlo. Las bases del estudio
son los 12 protocolos de segmentación manual más influyentes en la literatura, entre los que se encuentran los 5
protocolos que comparaba Nestor.
Boccardi et al. [3] describe el proceso seguido. Se utiliza un procedimiento Delphi, que se basa en realizar sucesivas
sesiones de votación con el objetivo de que las opiniones acaben convergiendo. En el proceso de votación participaron
16 expertos en anatomı́a del hipocampo y segmentación manual, ası́ como los autores de los principales protocolos.
El procedimiento Delphi constó de cinco rondas, en la primera de las cuáles se preguntaba a los panelistas por
la inclusión de determinadas estructuras en la definición del hipocampo, solicitando que razonaran su posición.
En las siguientes rondas se mostraban de forma anónima los resultados de las rondas anteriores, ası́ como los
ETSIDI - UPM
6
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
razonamientos presentados, con el objetivo de que las opiniones convergieran a un punto de mutuo acuerdo a
mediad que los participantes fuesen adquiriendo más información sobre otros puntos de vista.
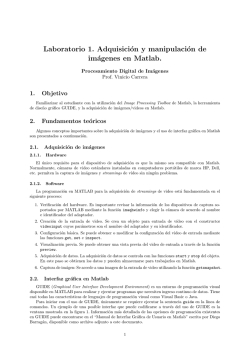
Una de las cuestiones principales del proceso consistı́a en establecer las regiones del hipocampo que se incluirı́an
en el modelo armonizado (Figura 4), puesto que los protocolos anteriores habı́an sido muy dispares en este punto.
El procedimiento Delphi dio como resultado un modelo muy inclusivo del hipocampo, introduciendo el alveus y
la fimbria (zona amarilla), la cola completa (zonas azules) y el borde medio siguiendo la morfologı́a (SubiculumMorphology), utilizando la lı́nea horizontal (Subiculum-Horizontal) como segunda opción cuando la morfologı́a no
sea clara.
Figura 4: Izquierda: SUs (Segmentation units que forman el hipocampo. Derecha: Desglose de las SUs.
También se aprobaron la separación del alveus/fimbria del fórnix, y la orientación siguiendo la lı́nea AC-PC, entre
otras elecciones que conformaron el modelo definitivo del hipocampo para segmentación manual. Con esta iniciativa,
se pretende homogeneizar las segmentaciones realizadas en los diferentes estudios y proyectos para garantizar que los
resultados de un proyecto no dependan de las imágenes que se han utilizado para probarlo, sino que esos resultados
sean extrapolables a cualquier otra imagen.
2.2.
Registro no rı́gido
Como ya se ha comentado anteriormente, uno de los pasos en el proceso de segmentación de imágenes de resonancia
magnética es el registro de las imágenes. Con esta etapa se pretende convertir todas las imágenes, tanto los atlas
como la imagen paciente a un espacio común para poder compararlas directamente.
El registro se lleva a cabo aplicando transformaciones a los atlas y a la imagen paciente. La transformación a
aplicar se obtiene estableciendo una relación entre la imagen a transformar y el espacio al que se quiere llevarla. Si
transformamos todos los atlas y la imagen paciente a un espacio común, podremos después compararlas directamente
para obtener la segmentación objetivo. Sin embargo, habremos obtenido el etiquetado en el espacio común, por lo
que para devolverlo al espacio de la imagen paciente habrı́a que aplicar una transformación inversa al etiquetado.
Una forma de evitar tener que aplicar la transformación inversa es mediante el registro de los atlas a la imagen
paciente. De esta forma, los etiquetados asociados a cada atlas ya estarán en el espacio de la imagen paciente, por
lo que se podrá realizar directamente una fusión de los etiquetados para obtener la segmentación definitiva. Existen
muchos métodos para realizar el registro de las imágenes, aunque los más comunes se pueden agrupar en registro
rı́gido y registro no rı́gido. El registro rı́gido busca aplicar transformaciones afines, esto es, traslaciones, rotaciones
y escalado, entre otros, para alcanzar la máxima similitud posible entre las imágenes.
En cuanto al registro no rı́gido, utiliza además otras técnicas como B-Splines para establecer deformaciones locales
y adaptar mejor la imagen transformada a la imagen de referencia.
En este informe se analizan tres métodos de registro no rı́gido: elastix, Advanced Normalization Tools (ANTs) y
el etiquetado basado en patches. Se estudiará este último método en mayor profundidad en la sección 4.
ETSIDI - UPM
7
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
2.2.1.
elastix toolbox
elastix es una toolbox de código abierto que se maneja mediante comandos propuesta por Klein et al. [4]. elastix
tiene un diseño modular e incluye múltiples métodos y modelos de optimización, interpolación y transformación,
con un software basado en la biblioteca de procesamiento de imágenes médicas Insight Toolkit (ITK).
Con elastix, el problema del registro de imágenes queda reducido a la optimización de una función de coste C
minimizada respecto de la transformación T. El problema de la optimización quedarı́a de la siguiente forma:
µ = argminC(Tµ ; IF , IM )
(1)
Donde μrepresenta el vector de parámetros de la transformación, Tμ la transformación parametrizada, IF la imagen
de referencia (Fixed image) e IM la imagen a transformar (Moving image).
Como se ha comentado anteriormente, elastix es un software modular dividido en componentes que pueden tomar
distintos valores, permitiendo trabajar y comparar de forma sencilla diferentes métodos y técnicas. Podemos ver la
estructura de los componentes principales de elastix en la imagen 5.
Figura 5: Componentes de elastix para registro
Función de coste: Mide la similitud entre la imagen fija (IF ) y la imagen móvil (IM ). Algunas de las medidas que
incluye elastix son la media de diferencias cuadradas (MSD), información mutua (MI) o MI normalizada
(NMI).
Transformación: elastix admite como modelos de transformación la traslación, rı́gida (traslación y rotación), similitud (transformación rı́gida más escalado isotrópico), afı́n y no rı́gida (permite variar el número de
parámetros).
Optimización: Permite resolver el problema del registro. Se incluyen muchos métodos, pero uno de los que
mejores resultados ofrece es el gradient descent.
Muestreo: Se utiliza para calcular la función de coste. Los métodos disponibles son muestreo de todos los
vóxeles, de un conjunto de vóxeles en una cuadrı́cula uniforme, muestreo aleatorio y muestro aleatorio fuera
de la cuadrı́cula de vóxeles.
Interpolación: También se usa en el cálculo de la función de coste. Algunos de los métodos más utilizados son
nearest neighbours, lineal y B-Splines de orden N.
Estrategias jerárquicas: elastix soporta pirámides gaussianas con y sin reducción de escala, entre otros
métodos.
ETSIDI - UPM
8
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
2.2.2.
ANTs
Otra metodologı́a para realizar el registro no rı́gido de las imágenes consiste en utilizar los recursos que nos proporciona la biblioteca de procesamiento de imágenes Insight Toolkit (ITK).
Dentro del software ANTs (Advanced Normalization Tools) existe una aplicación que actúa como interfaz con las
herramientas de registro de ITK y que permite un alto grado de configuración de las mismas.
En [5], Avants et al. explican las mejoras introducidas en la versión 4 de ITK. Algunas de las más importantes
se refieren al registro de imágenes, como el hecho de que todo el registro se puede realizar en un único paso
(itkCompositeTransform), permitiendo varias etapas de registros de diferente tipo sin aumentar por ello la
complejidad. Además, con ITKv4 las transformaciones afines y deformables se usan de forma similar, facilitando
su uso, y se implementa multi-threading en la medida de similitud, la actualización del gradiente y la etapa de
optimización. En la figura 6 podemos comprobar la estructura de ITKv4 y algunas de las mejoras que aparecen.
Figura 6: Estructura para registro con ITKv4
Una de las ventajas del software ANTs es que es un framework muy versátil que, al igual que ocurrı́a con elastix,
puede adaptarse a diferentes situaciones. Esto le ha llevado a ser ampliamente utilizado en estudios de relevancia
internacional. Uno de los estudios en los que se ha utilizado este framework es AHEAD (Automatic Hippocampal Estimator using Atlas-based Delineation). Este proyecto, desarrollado por Suh et al. [6] tiene por objetivo la
segmentación automática de imágenes MRI T1 usando segmentación multi-atlas.
Las etapas seguidas en el programa son:
Preparación del directorio de trabajo en el que se guardarán los resultados.
Registro rı́gido utilizando FSL FLIRT.
Registro no rı́gido utilizando ANTs.
Preparación del proceso de votación.
Votación con pesos.
Corrección de la segmentación basada en aprendizaje.
Copia de los resultados finales al fichero.
ETSIDI - UPM
9
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
2.2.3.
Patch-labeling
La segmentación basada en patches es otro de los métodos que utilizan registro no rı́gido, y es el método en el que
nos vamos a centrar en la segunda parte de este informe (sección 4).
Se define un patch como un conjunto de pı́xeles (o vóxeles) próximos. Un patch queda representado por las coordenadas de su centro y los valores del radio en todas las dimensiones de la imagen (tres, en el caso de MRI). A
pesar de la simplicidad del concepto, las técnicas basadas en patches han producido excelentes resultados, puesto
que permiten estudiar la similitud entre vóxeles aprovechando también el entorno, y no sólo el propio vóxel.
Siguiendo esta lı́nea de pensamiento, Coupé et al. [7] proponen un método basado en patches e inspirado en los
filtros de nonlocal means utilizados en técnicas de denoising. Partiendo de un conjunto de atlas de referencia con
sus correspondientes segmentaciones manuales, realizan un análisis en intensidad de los patches, considerando que
dos vóxeles forman parte de la misma estructura si tienen entornos de vecindad (representados por los patches)
con intensidades similares. En función de la similitud de los patches, se asocia una ponderación a los vóxeles que
forman el patch. Finalmente, se hace la fusión de los etiquetados utilizando las ponderaciones calculadas.
Para el método propuesto por Coupé et al., las imágenes pasan por etapas de denoising y corrección de la nohomogeneidad, y son registradas de forma afı́n al espacio estereotáctico. Por último, se normaliza la intensidad y se
reducen las imágenes a una región de interés (ROI). Una vez preparados los atlas, ya se puede empezar el proceso
de segmentación (Figura 7).
Figura 7: Método propuesto por Coupé et al. [7]
En primer lugar, se realiza una preselección de los vóxeles que van a aportar más información para reducir el tiempo
de ejecución. Para ello, se define una máscara de inicialización que es la unión de todas las segmentaciones de los
atlas. Después se eligen los mejores atlas aplicando suma de diferencias al cuadrado (SSD). Finalmente, se hace una
preselección de los patches que se van a comparar aplicando una medida de similitud:
ETSIDI - UPM
10
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
ss =
2σi σs,j
2µi µs,j
∗
2
µ2i + µ2s,j σi2 + σs,j
(2)
Donde µ es la media y σ la desviación estándar, el subı́ndice i representa el vóxel objetivo y el subı́ndice s,j los
vóxeles de referencia. Si la medida de similitud ss es mayor que un umbral predefinido th, se considera el patch y
se calcula su ponderación de la siguiente forma:
w(xi , xs,j ) = exp(
−||P (xi ) − P (xs,j )||22
)
h2 (x)
(3)
La fusión de las ponderaciones obtenidas se realiza con la siguiente expresión:
N P
P
v(xi ) =
w(xi , xs,j )ys,j
s=1 j∈vi
N P
P
(4)
w(xi , xs,j )
s=1 j∈vi
Si el valor de v(xi ) es superior a 0.5, se asigna la etiqueta 1. En caso contrario, se asigna 0. Coupé expone diversos
experimentos y comprueba que el método basado en patches propuesto obtiene mejores resultados que otros como
los basados en apariencia.
Por otra parte, Rousseau et al. [8] también proponen un método basado en intensidad con patches, aunque en este
caso se basan en un grafo con pesos que une los vóxeles de la imagen paciente con los vóxeles de los atlas, y en el que
los pesos representan la similitud entre los patches. Rousseau propone un método pair-wise en el que se registra cada
atlas a la imagen paciente para después fusionar los resultados, y un método group-wise en el que se combinan todos
los atlas para formar un etiquetado borroso que aplicar a la imagen paciente. Estos métodos son pointwise, es decir,
ofrecen una estimación para cada vóxel. Sin embargo, también es posible obtener una estimación del etiquetado de
todo el patch (multipoint), resultando en varios etiquetados para cada vóxel, que luego hay que fusionar (Rousseau
et al. usan votación por mayorı́a). Por último, proponen reducir el tiempo de ejecución del multipoint reduciendo
la cantidad de operaciones a realizar (fast-multipoint).
En vista de los resultados, queda claro que el método multipoint ofrece mejores resultados que el resto, mientras
que el fast-multipoint mejora en gran medida los tiempos de ejecución, superando incluso a ANTs.
En la sección 4 estudiaremos otro método que combina las técnicas de patch-labeling con el registro no rı́gido.
ETSIDI - UPM
11
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
3.
Localización de atlas para AD
3.1.
Objetivo
En este capı́tulo nos hemos centrado en la localización de atlas especı́ficos para la enfermedad de Alzheimer (AD).
El objetivo ha sido la búsqueda de dichos atlas para formar una base de datos robusta y versátil que poder aplicar
a los algoritmos de que utilizamos en las otras fases del proceso se segmentación de las imágenes de hipocampo.
3.2.
Metodologı́a
Ya hemos visto en la sección 2.1 la importancia de seguir una metodologı́a concreta tanto en la adquisición (Jack et
al. [2]) como en la segmentación de las imágenes (Nestor et al. [1] y Boccardi et al. [3]), por lo que para establecer
nuestra nueva base de atlas era preciso que tuviéramos en cuenta los protocolos seguidos.
En vista de los estudios analizados, resulta fácil ver el motivo por el que nos hemos decantado por establecer nuestra
base de atlas como una combinación de ADNI y el protocolo armonizado (HarP).
ADNI es un estudio que contiene una gran cantidad de imágenes adquiridas siguiendo un protocolo muy especı́fico
(Jack et al. [2]), lo que implica que todas las imágenes están tomadas en condiciones similares y que son directamente
comparables entre sı́. Además, ofrece una población muy variada, de más de 1500 sujetos de diferentes edades, sexos
y etapas de la enfermedad.
En cuanto al protocolo armonizado (HarP), unifica las segmentaciones manuales del hipocampo después de haber
realizado un procedimiento Delphi (Boccardi et al. [3]) en el que expertos en el hipocampo y la segmentación manual
llegaron a una acuerdo acerca de cómo debe segmentarse el hipocampo. Posteriormente, Boccardi et al. [9] llevan a
cabo la segmentación siguiendo el protocolo armonizado de 135 imágenes MRI-T1 de ADNI, para las que segmentan
en todos los casos los hipocampos izquierdo y derecho, y en la mayorı́a de casos el fluido cerebroespinal izquierdo
y derecho.
Nosotros hemos utilizado las segmentaciones de Boccardi et al. junto con sus correspondientes imágenes de ADNI
para conformar nuestra base de atlas. Puesto que la gran mayorı́a de nuestros algoritmos funcionan en MATLAB,
hemos tenido que guardar las imágenes y los etiquetados como un fichero .mat que pueda leer el programa.
Para poder leer las imágenes desde MATLAB hemos utilizado las funciones de las librerı́as ITK (Insight Toolkit)
desde una función MEX. De este modo, nuestro programa de MATLAB ejecuta la función MEX loadADNIVolume,
la cual carga las imágenes mediante funciones de ITK. La función que lee el volumen dentro de la MEX se muestra
a continuación:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
v o i d getVolumeFloat32 ( c h a r ∗ InputFile , PixelFloat32 ∗ OutputMatlabVolume )
{
CounterType ImagePixelCounter = 0 , ImageDimensionCounter =0;
/∗ ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
∗
ITK Image r e a d i n g .
∗
∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ ∗/
ReaderFloat32 : : Pointer reader = ReaderFloat32 : : New ( ) ;
reader−>SetFileName ( InputFile ) ;
reader−>Update ( ) ;
reader−>UpdateLargestPossibleRegion ( ) ;
ImageFloat32 : : Pointer image = reader−>GetOutput ( ) ;
ImageFloat32 : : RegionType region ;
region = image−>GetLargestPossibleRegion ( ) ;
/∗ ∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
∗
Output v a r i a b l e g e n e r a t i o n .
∗
∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗ ∗/
// Matlab masked volume g e n e r a t i o n .
ConstIteratorFloat32 OutputImageIterator ( image , region ) ;
f o r ( OutputImageIterator . GoToBegin ( ) ; ! OutputImageIterator . IsAtEnd ( ) ; OutputImageIterator++)
OutputMatlabVolume [ ImagePixelCounter++] = OutputImageIterator . Get ( ) ;
}
3.3.
Resultados
Tomando los etiquetados del protocolo armonizado (HarP) y las imágenes correspondientes de ADNI, hemos formado
una base de atlas de 134 sujetos con edades comprendidas entre los 60.4 y los 89.7 años, donde tenemos 70 hombres
y 64 mujeres. Como podemos ver, tenemos un grupo de sujetos muy heterogéneo, lo que nos beneficiará a la hora
de probar nuevos algoritmos en las condiciones más exigentes.
ETSIDI - UPM
12
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
Entre los pacientes de nuestra base, tenemos 69 para los que se ha realizado MRI con intensidad de campo 1.5T,
mientras que los otros 65 tienen una intensidad de 3T. En las tablas 1 y 2 podemos ver un desglose de los datos de
los sujetos.
60-65
65-70
70-75
75-80
80-85
85-90
Hombres
10
12
16
11
11
10
Mujeres
5
11
18
12
9
Total
15
23
34
23
20
19
Tabla 1: Distribución por edades de los pacientes de la base de atlas
NC
MCI
LMCI
AD
Hombres
23
18
8
21
Mujeres
21
11
8
24
Total
44
29
16
45
Tabla 2: Distribución por diagnóstico de los pacientes de la base de atlas
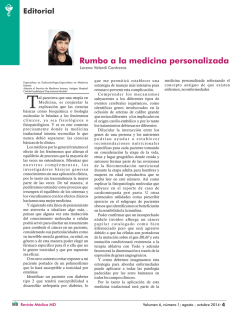
En la imagen 8 podemos ver un ejemplo de las imágenes obtenidas a partir de ADNI-HarP.
(a) Imagen de ADNI
(b) Segmentación de HarP
(c) Superposición de imagen y atlas
Figura 8: Atlas del paciente 002 S 0295 en sagital
ETSIDI - UPM
13
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
4.
4.1.
Técnicas de patch-labeling
Objetivo
En este capı́tulo nos hemos centrado en un método de registro no rı́gido especı́fico que utiliza técnicas de etiquetado
con patches en combinación con técnicas de registro no rı́gido (atlas-warping). El objetivo del capı́tulo es el estudio
y la optimización del método propuesto por Platero [10] utilizando para ello funciones MEX.
4.2.
Metodologı́a
Platero [10] propone un método de segmentación que combina una primera fase de registro no rı́gido y una segunda
fase de patch-labeling con el objetivo de mejorar las segmentaciones y a la vez reducir el tiempo de ejecución del
algoritmo.
En la primera etapa del algoritmo propuesto, se registran de forma no rı́gida un conjunto de atlas en el espacio de
la imagen paciente usando atlas-warping. Después, se aplica un método de fusión de etiquetas basado en la minimización de una función pseudo-booleana basada en cortes de grafos. Esta función tiene información de apariencia,
forma y contexto, y se define de la siguiente forma:
X
X
E(S) =
ψx (S(x); θ1 (I, A)) + λ
ψxy (S(x), S(y); θ2 (I))
(5)
x∈Ω
x,y∈E
Donde (θ1 , θ2 ) son los parámetros del modelo y λun parámetro ajustable que determina la incidencia relativa de los
potenciales de orden uno y los potenciales de orden dos. El primer término se refiere a los potenciales de orden uno
(ψx ), que contienen información sobre la forma y la intensidad, mientras que el segundo término hace referencia a
los potenciales de orden dos (ψxy ), que recogen información sobre el entorno, actuando como término de suavizado.
En la segunda etapa del algoritmo, se utiliza la segmentación conseguida en el paso anterior en el etiquetado con
patches. Se utiliza otro conjunto de atlas, registrados esta vez de forma afı́n, y se seleccionan los patches más
apropiados utilizando una medida de similitud basada en la intensidad y en el etiquetado. La medida de similitud
se define de la siguiente forma:
Figura 9: Medida de similitud para los patches
Esta medida de similitud considera la media y la desviación tı́pica del patch objetivo y el considerado, tanto en
intensidad como en similitud. El patch se selecciona si ss es mayor que el umbral al cuadrado. En los experimentos,
el umbral toma un valor de 0.85. Una vez seleccionados los patches, se calcula una estimación del etiquetado con
multi-point.
En esta sección se propone realizar una optimización del código original utilizando funciones MEX para reducir el
tiempo de ejecución del programa. La parte del código que vamos a optimizar es la sección en la que se realiza el
multi-point.
Para ello, en primer lugar enviamos todas las variables que nos hagan falta a C++ mediante la MEX (imágenes,
lista de patches, spacing y el umbral, entre otros). Después recorremos la lista de los patches (dados por su punto
central), y obtenemos todos los vóxeles que forman parte del patch utilizando el radio de los patches.
A continuación, recorremos todos los vóxeles del patch y calculamos la medida de similitud. Si es mayor que el
umbral, calculamos la diferencia entre la intensidad del vóxel y la del centro del patch. Hacemos lo mismo para la
segmentación y hacemos la fusión de etiquetas mediante nonlocal means.
Además de intentar optimizar todo el código de C++, se ha utilizado la paralelización con OpenMP del bucle que
recorre todos los centros de los patches, ya que es el bucle con mayor carga computacional de todo el programa.
ETSIDI - UPM
14
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
4.3.
Resultados
Se han comparado los resultados obtenidos con el programa original y los obtenidos aplicando la función MEX
parDLM. Se ha utilizado un umbral de 0.85, un tamaño de vóxel de 0.9375x1.5x0.9375 mm3 y un radio del patch
de 3x1.5x3. Para esta prueba se han obtenido los DICE de dos regiones de interés para 18 imágenes utilizado en la
fusión 2 atlas.
La llamada a la función parDLM es la siguiente:
Los resultados obtenidos para el programa original y para el programa propuesto con función MEX se muestran en
la figura 10.
Como es lógico, el programa propuesto ofrece los mismos resultados de DICE que el original. En cuanto al tiempo
de ejecución, ambos programas tardan aproximadamente lo mismo en obtener los 36 DICE, por lo que no podemos
considerar que hayamos mejorado el código original.
Se propone seguir trabajando en el tema para reducir más el tiempo de ejecución.
ETSIDI - UPM
15
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
(a) Programa original (sólo MATLAB)
(b) Programa propuesto (con MEX)
Figura 10: Resultados obtenidos
ETSIDI - UPM
16
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
5.
Desarrollos futuros
Las próximas tareas con las que se prevé continuar el presente trabajo suponen mejorar y seguir trabajando con las
lı́neas de investigación que se han presentado en este informe. En concreto, las tareas en las que vamos a centrar
ahora nuestra atención son:
Realizar el procesamiento de las 134 imágenes de la base de atlas de ADNI-HarP (ver sección 3. Esto incluye
realizar una primera iteración de skull-stripping, corrección de bias, una segunda iteración de skull-stripping
y calcular el volumen intracraneal (ICV).
Para la base de atlas de ADNI-HarP, también hay que comprobar si alguno de los atlas está girado y corregir
este giro, puesto que los atlas que no están bien orientados reducen en gran medida la eficacia de los algoritmos
de segmentación.
Mejorar los resultados del algoritmo de patch-labeling (ver sección 4). Para ello se propone utilizar blocks
como método para tratar con las imágenes.
Estudiar el algoritmo AHEAD (ver sección 2.2.2), ver cómo hace el registro de las imágenes y localizar los
parámetros que utiliza para generar las regiones de interés.
ETSIDI - UPM
17
Informe pre-TFG
Protocolos de adquisición de imágenes. Métodos de registro no rı́gido
Referencias
[1] Nestor, S.M., Gibson, E., Gao, F.Q., Kiss, A., Black, S.E., Initiative, A.D.N., et al.: A direct morphometric
comparison of five labeling protocols for multi-atlas driven automatic segmentation of the hippocampus in
alzheimer’s disease. NeuroImage 66 (2013) 50–70
[2] Jack, C.R., Bernstein, M.A., Fox, N.C., Thompson, P., Alexander, G., Harvey, D., Borowski, B., Britson, P.J.,
L Whitwell, J., Ward, C., et al.: The alzheimer’s disease neuroimaging initiative (adni): Mri methods. Journal
of Magnetic Resonance Imaging 27 (2008) 685–691
[3] Boccardi, M., Bocchetta, M., Apostolova, L.G., Barnes, J., Bartzokis, G., Corbetta, G., DeCarli, C., Firbank,
M., Ganzola, R., Gerritsen, L., et al.: Delphi definition of the eadc-adni harmonized protocol for hippocampal
segmentation on magnetic resonance. Alzheimer’s & Dementia (2014)
[4] Klein, S., Staring, M., Murphy, K., Viergever, M.A., Pluim, J.P.: Elastix: a toolbox for intensity-based medical
image registration. Medical Imaging, IEEE Transactions on 29 (2010) 196–205
[5] Avants, B.B., Tustison, N.J., Stauffer, M., Song, G., Wu, B., Gee, J.C.: The insight toolkit image registration
framework. Frontiers in neuroinformatics 8 (2014)
[6] Suh, J.W., Wang, H., Das, S., Avants, B., Yushkevich, P.A.: Automatic segmentation of the hippocampus in
t1-weighted mri with multi-atlas label fusion using open source software: Evaluation in 1.5 and 3.0t adni mri.
International Society for Magnetic Resonance in Medicine (ISMRM) conference (2011)
[7] Coupé, P., Manjón, J.V., Fonov, V., Pruessner, J., Robles, M., Collins, D.L.: Patch-based segmentation using
expert priors: Application to hippocampus and ventricle segmentation. NeuroImage 54 (2011) 940–954
[8] Rousseau, F., Habas, P.A., Studholme, C.: A supervised patch-based approach for human brain labeling.
Medical Imaging, IEEE Transactions on 30 (2011) 1852–1862
[9] Boccardi, M., Bocchetta, M., Morency, F.C., Collins, D.L., Nishikawa, M., Ganzola, R., Grothe, M.J., Wolf,
D., Redolfi, A., Pievani, M., et al.: Training labels for hippocampal segmentation based on the eadc-adni
harmonized hippocampal protocol. Alzheimer’s & Dementia (2015)
[10] Platero, C.: Combining patch-based strategies and non-rigid registration-based label fusion methods. (Pending
publication) (2015)
ETSIDI - UPM
18


© Copyright 2026