
Temario
Temario
PARTE 1: SISTEMAS DE RADAR
TEMA 1: INTRODUCCIÓN
1. Orı́genes del radar
2. Diagrama de bloques de un radar
3. Aplicaciones del radar
TEMA 2: LA ECUACIÓN RADAR
1. Detección de señales bajo ruido
2. Probabilidades de detección y falsas alarmas
3. Sección recta radar
TEMA 3: TIPOS DE RADAR
1.
2.
3.
4.
MTI, Doppler pulsado
Radar de seguimiento
Radar meteorológico
Radar de observación de la Tierra
PARTE 2: SISTEMAS TERRESTRES
TEMA 1: INTRODUCCIÓN
1. Fundamentos de navegación terrestre
2. Errores de posicionamiento
3. Propagación de Ondas
TEMA 2: SISTEMAS DE NAVEGACIÓN HIPERBÓLICOS
1.
2.
3.
4.
Introducción
Sistema OMEGA
Sistema DECCA
Sistema LORAN-C
TEMA 3: RADIOFAROS
1. VOR (Very High Frequency Omnidirectional Range)
2. DME (Distance Measuring Equipment)
1
2
3. TACAN (TACtical Air Navigation)
TEMA 4: SISTEMAS DE APROXIMACIÓN Y ATERRIZAJE
1. Sistema ILS (Instrument Landing System)
2. Sistema MLS (Microwave Landing System)
PARTE 3: SISTEMAS SATELITALES
TEMA 5: INTRODUCCIÓN
1. Geometrı́a y órbita de un satélite
2. Principios de navegación por satélite
3. Señales de espectro ensanchado
4. Errores de posicionamiento en sistemas satelitales
TEMA 6: TRANSIT
1. Principios
2. Exactitud
3
TEMA 7: GPS
1.
2.
3.
4.
5.
6.
7.
Señal GPS
Antenas y sistemas receptores GNSS
Adquisición y seguimiento de la portadora y el código
Procesado de señal y posicionado
GPS diferencial
Sistemas GPS extendidos
Integración del GPS con otros sensores
TEMA 8: GALILEO
1. Señal Galileo
2. Interoperabilidad entre GPS y Galileo
3. Servicios y Aplicaciones basados en el sistema Galileo
4
Prefacio
La radiodeterminación, es la determinación de la posición, la velocidad u otras caracterı́sticas de un objeto, o de cierta información relacionada con esos parámetros mediante
el uso de ondas de radio.
Dentro de la radiodeterminación, hay dos campos principales: la radiolocalización,
que es actúa sobre objetos pasivos y se refiere fundamentalmente a sistemas radar, y la
radionavegación, básicamente activa.
La palabra radar es un acrónimo que significa Radio d etection and r anging. Un radar
es un sistema electromagnético que sirve para detectar y localizar objetos reflectantes
tales como aviones, barcos, naves espaciales, vehı́culos, gente o elementos del medio, desde
la lluvia a una montaña. La energı́a electromagnética que retorna al radar no solamente
indica la presencia de un “blanco” sino que mediante la comparación de la señal eco recibida
con la enviada se pueden obtener otros datos sobre el citado blanco. Actualmente el campo
de la tecnologı́a radar es enormemente variado y cubre desde los radares incoherentes de
costa a los meteorológicos, los de apertura sintética, los de seguimiento o los de control
aéreo.
En cuanto a la radionavegación, se trata de una disciplina de gran interés dada la
necesidad de disponer de ayudas para la navegación y el posicionamiento tanto en tierra
como en mar o aire. Un ejemplo de esa necesidad ha sido la de las compañı́as petrolı́feras
para tener buenas guı́as de geolocalización en el mar, y que proporcionó una fuente de
financiación de la tecnologı́a previa al GPS. En cuanto a este último, se engloba dentro
de los llamados Global Navigation Satellite System (GNSS) y engloba tanto al Global
Positioning System (GPS) americano, en estos momentos el único funcional, como el
Global’naya Navigatsionnaya Sputnikovaya Sistema, o GLONASS, que es el sistema ruso
que dejó de serlo con la caida del bloque soviético, el GALILEO europeo, el Indian Regional
Navigational Satellite System (IRNSS) indio o el COMPASS chino.
5
6
Chapter 1
Introducción a los Sistemas Radar
El principio básico del radar consiste en generar una señal electromagnética de una cierta
energı́a que es radiada y posteriormente interactúa con un objeto que llamamos blanco y
reflejada en un cierto rango de direcciones. Esta reflexión se puede detectar si una antena
la capta y la entrega a un receptor. La función básica es detectar el retraso entre la señal
emitida y la detección del eco y calcular ası́ la distancia o alcance.
1.1
1.1.1
Conceptos básicos
Alcance del blanco
La señal radar más simple es una serie de pulsos cuadrados (lógicamente no complemente
rectangulares en la práctica, ya que se trata de una idealización matemática) cada uno
de una duración muy pequeña y modulados a través de una portadora sinusoidal. Esta
configuración se llama habitualmente tren de pulsos. El alcance del blanco se determina
por el tiempo TR que transcurre entre la emisión de un cierto pulso y la recepción de su
retorno. Este tiempo es igual a 2R/c donde c es la velocidad de la luz en el medio. Por
tanto, podemos calcular el alcance como
R=
c TR
2
(1.1)
Si el medio es el vacı́o, un viaje de ida y vuelta de un pulso de una duración de 1 µs
corresponde a una distancia de 150 m. Inversamente, recorrer 1 km en ida y vuelta
significa un retraso de 6.7 µs.
1.1.2
Alcance máximo no ambiguo
En la configuración de un tren de pulsos, es necesario que entre pulso y pulso haya tiempo
suficiente para recibir el eco, de manera que se pueda identificar cada eco como resultante
del último pulso enviado. Si el tiempo entre pulsos Tp es demasiado corto, entonces el eco
de un blanco lejano pero detectable llegará después de la emisión de un pulso posterior al
que le originó y podrı́a asociarse incorrectamente con el citado pulso posterior. El alcance
7
8
Introducción a los Sistemas Radar
Figure 1.1: Ciclo de trabajo de un radar
a partir del cual esto puede ocurrir, dada un cierto Tp , se denomina alcance máximo no
ambiguo, y viene dado por
cTp
c
Run =
=
(1.2)
2
2fp
donde Tp se denomina periodo de repetición del pulso o PRP y fp es la frecuencia de
repetición del mismo o PRF (pulse repetition frequency).
1.1.3
Forma de Onda
Un radar tı́pico utiliza una forma de onda pulsada. Un ejemplo, ya mencionado antes, es
el de una onda cuadrada con una cierta potencia de pico Pt en banda base, una anchura
de pulso τ , y una PRP Tp . La potencia promedio Pav de un tren de pulsos, cuadrados
o no, es Pt τ /Tp = Pt τ fp si estamos en banda base. El ciclo de trabajo o duty cycle de
una cierta forma de onda se define como el cociente entre el tiempo total durante el cual
el radar está radiando y el tiempo total transcurrido entre el primer y el último pulso
considerado. Su valor se calcula con la fórmula
τ
Pav
= τ fp =
Tp
Pt
Si un pulso tiene una anchura de τ = 1 µs, la forma de onda se extiende en el espacio una
distancia de cτ = 300 m. Dos blancos iguales se puede distinguir, por tanto, si la distancia
entre ellos es la mitad de este valor, cτ /2, dado que el valor del tiempo transcurrido entre
la emisión del pulso y la recepción de los dos ecos estará separada por el doble del que
tarda la señal en ir de un blanco al otro. Este valor determina la resolución espacial del
radar.
Normalmente se necesitan pulsos largos para radares de largo alcance de manera que
la energı́a reflejada sea detectable. Un pulso largo, como hemos visto, tiene la desventaja
de una mala resolución espacial. Para solventar este problema se suele modular la fase
o la frecuencia del pulso, de modo que en el procesado de recepción se pueda utilizar la
llamada compresión del pulso, que se describirá más tarde.
José Luis Álvarez Pérez
9
También se han usado formas de onda continua, donde la caracterı́stica detectable es
el desplazamiento Doppler motivado por el movimiento relativo del blanco y el radar. Si la
onda continua o CW (continuous wave) no está modulada, entonces no es posible obtener
la distancia o alcance del radar al blanco. Sin embargo, podemos modular la frecuencia
de la señal de manera que el tiempo de dicha modulación juegue el papel del periodo de
repetición. Efectivamente, durante este tiempo de modulación podemos identificar cuánto
tiempo ha transcurrido desde que la frecuencia tomó un cierto valor de inicio a través del
desplazamiento en frecuencia entre señal emitida y recibida. Estos sistemas se denominan
FM-CW.
Aquellos radares pulsados que extraen el desplazamiento Doppler pertenecen a la clase
llamada MTI (moving target indication) o a la de radares Doppler pulsados, dependiendo
de los valores de la PRF y el ciclo de trabajo. Un radar MTI tiene una PRF y un ciclo de
trabajo bajos, mientras que un radar Doppler pulsado se caracteriza por valores altos en
ambos parámetros. Estos tipos de radar se describirán más adelante y solamente anticipamos que un radar MTI utiliza el desplazamiento Doppler de los blancos en movimiento
para eliminar aquello que no está sujeto a dicho Doppler, es decir, el retorno de blancos
estacionarios en los que no estamos interesados. De esta manera, un radar MTI detecta
el Doppler pero no lo utiliza para medir la velocidad de los mismos, mientras que el radar
Doppler pulsado sı́ lo hace.
1.2
La forma simple de la ecuación del radar
La ecuación radar relaciona la potencia recibida o, alternativamente, la relación señalruido con las caracterı́sticas del transmisor, el receptor, la antena, el blanco y el entorno
de propagación. Es útil no solamente para saber el alcance máximo del radar sino para
entender los factores que afectan al rendimiento del sistema.
Supondremos que la misma antena funciona como transmisora y como receptora. Si
tuviésemos una antena isotrópica (es decir, que radia igualmente en todas direcciones) de
potencia total Pt 1 , la densidad de potencia a una distancia R será
Pt
4πR2
Sin embargo, una antena genérica no es isotrópica sino que reparte su energı́a de manera
diferente en diferentes direcciones según lo que se llama el diagrama de radiación, caracterizado por una función ganancia G(θ, φ), donde θ y φ son los ángulos que indican una
dirección en un sistema de referencia esférico. La densidad de potencia recibida en un
punto visto desde la antena con ángulos θ y φ es entonces
Pt G(θ, φ)
4πR2
1
Es indiferente usar valores de pico o promedio siempre y cuando seamos consistentes y más adelante
usemos el mismo tipo de valor para Pr o Smin
10
Introducción a los Sistemas Radar
con
Densidad angular de potencia radiada en una dirección dada por θ y φ
Densidad angular de potencia radiada si la antena si fuese isotrópica
Densidad angular de potencia radiada en una dirección dada por θ y φ
= 4π
Potencia total emitida por la antena
(1.3)
G(θ, φ) =
El blanco se caracteriza por devolver parte de esa energı́a como eco. La cantidad de
energı́a que refleja la representamos por la llamada sección recta radar, que denotamos
como σ y tiene unidades de área, y se puede interpretar como el área ideal equivalente de
un material perfectamente reflector -es decir, un conductor perfecto- colocada de manera
perpendicular a la dirección de propagación que produjese el mismo eco. La densidad de
energı́a potencialmente detectable del eco una vez que haya llegado a la posición de la
antena es
Pt G(θ, φ) σ
4πR2 4πR2
donde hemos tenido en cuenta de nuevo la ley inversa del cuadrado de la propagación de
las ondas electromagnéticas. Por otro lado, la antena tiene unas ciertas dimensiones y
una cierta forma, de tal manera que no detecta la densidad de energı́a en un punto sino
una cantidad de energı́a que depende de su área, su eficacia frente a pérdidas óhmicas y
su forma. Todo esto queda reflejado en la llamada área efectiva, que, de manera parecida
a la explicación que dábamos para la sección recta radar, es el área equivalente de una
antena de apertura que recogiese toda la energı́a disponible en su superficie. Denotamos
este área como Ae , de manera que la potencia recogida por la antena será
Pt G(θ, φ) Ae
σ
(4πR2 )2
Pr =
(1.4)
El alcance máximo de un radar Rmax es la distancia máxima que produce un eco
detectable. Si la potencia detectable mı́nima es Smin , el alcance máximo será
h P G(θ, φ) A i1/4
t
e
Rmax =
σ
(1.5)
(4π)2 Smin
Esta ecuación se llama ecuación del alcance del radar.
La teorı́a de antenas nos dice que, si usamos la misma antena y en recepción, G y Ae
están relacionadas a través de la ecuación
G=
4πAe
λ2
(1.6)
donde λ es la longitud de onda de la señal radiada. Esto permite poner (1.5) como
Rmax =
h P G(θ, φ)2λ2 i1/4
t
σ
(4π)3 Smin
(1.7)
i1/4
Pt A2e
σ
4πλ2 Smin
(1.8)
o como
Rmax =
h
José Luis Álvarez Pérez
11
En estas ecuaciones vemos que en un caso el alcance es proporcional a la raı́z cuadrada de
la longitud de onda y en otro inversamente proporcional. Esta contradicción es solamente
aparente ya que cada caso supone dejar los otros parámetros fijos, pero realmente dependen
de la longitud de onda también. Es decir, que tanto G como Ae dependen de ella.
Esta ecuación de antena es una versión simplificada que sobreestima el nivel de señal
recibido. En un capı́tulo próximo veremos la versión completa, que tiene en cuenta todos
los factores involucrados en la recepción y procesado del eco.
1.3
Diagrama de bloques de un radar
El modo de operar de un radar se puede describir con la ayuda de un diagrama de bloques
como el de la figura. El transmisor puede ser un amplificador de potencia, como por
ejemplo un klystrón, un tubo de ondas progresivas, un amplificador con transistores o un
magnetrón.
La eficiencia de las fuentes de radiofrecuencia (RF) tı́picamente es de un 10 a un 60
por ciento. La eficiencia de conversión RF se define como el cociente entre la potencia RF
disponible a la salida del aparato y la potencia en continua usada para hacerlo funcionar.
Un medida más adecuada es la eficiencia del sistema transmisor, que es cociente de la
potencia RF final disponible del transmisor y la potencia total necesaria para operar el
transmisor. Esta última consiste en toda la energı́a necesaria para generar los electrones
que serán atraı́dos hacia el cátodo, la energı́a necesaria para mantener los electrones de la
cavidad confinados, la potencia necesaria para enfriar el dispositivo y para cualquier otra
operación destinada al correcto funcionamiento del sistema. Si la eficiencia de conversión
RF es del 40 o 50 por ciento, la del sistema transmisor puede reducirse al 20 o 25 por ciento.
Por ello, no es conveniente comenzar con un valor bajo de la eficiencia de conversión RF.
Para conseguir la máxima eficiencia muchas fuentes de potencia RF operan en régimen
de saturación, es decir, que están encendidas o apagadas, sin término medio. Esto es
adecuado para un radar que genera pulsos cuadrados. Sin embargo, cuando se desea tener
cierta modulación en amplitud se utilizan amplificadores de estado sólido, de los llamados
de clase A por ejemplo. Pulsos de una modulación en amplitud muy marcada no son
habituales en radar por su baja eficiencia.
Un transmisor no es solamente la fuente de potencia RF. Incluye los controladores
del amplificador o el generador de la forma de onda que luego se amplificará, la fuente de
alimentación en continua, los mecanismos de enfriamiento que pueden incluir algún tipo de
lı́quido refrigerante, dispositivos de protección que eviten la formación de arcos voltaicos
entre superficies de gran diferencia de potencial, dispositivos de monitorización, aislantes,
cables de alto voltaje, y mecanismos de blindaje para los rayos X que se pueden producir
en amplificadores del tipo klystrón u osciladores del tipo del magnetrón. No todos estos
elementos están presentes a la vez en un transmisor radar.
Una fiabilidad alta y una vida media larga son factores de gran importancia para
un transmisor. La vida media de la mayor parte de las fuentes de potencia RF es de
varios miles o decenas de miles de horas. Si un transmisor tiene un tiempo intermedio
entre fallos (MTBF, mean time between failures) más pequeño, las causas suelen deberse
12
Introducción a los Sistemas Radar
Figure 1.2: Diagrama de bloques de un radar. Contiene los elementos descritos en el texto
pero se ha elegido un diagrama que no sigue al pie de la letra lo ahı́ detallado con el fin de
recordar al lector que encontrará diferentes “estilos pictóricos” a la hora de representar el
diagrama de bloques de un radar.
a otros elementos del transmisor, a menudo los relacionados con mantener una temperatura controlada o los conectores RF. Se suele optar por un diseño eléctrico y mecánico
conservadores por este motivo.
En los años cuarenta y cincuenta el magnetrón fue el dispositivo por excelencia, usado
de manera casi exclusiva. De hecho hizo posible el uso de radares en la segunda guerra
mundial. Fue la opción de los aliados frente a Alemania que se inclinó por el klystrón.
Sin embargo tienen sus limitaciones: gran ruido térmico, producen gran potencia de pico
pero una baja potencia media, y su señal no puede ser modulada adecuadamente para
producir formas de onda que se puedan comprimir. El magnetrón sigue siendo una buena
solución cuando se necesita una fuente de energı́a en radiofrecuencia de pequeño tamaño
y coste. Su modo de funcionamiento se basa en calentar un filamento para que los electrones del mismo tengan una energı́a cinética alta que facilite su salida del filamento si
se ha creado un campo electrostático suficientemente fuerte entre un cátodo y un ánodo.
Estos electrones se confinan dentro de una cavidad gracias a un campo magnético y su
movimiento produce una onda electromagnética que dado que se produce en una cavidad
de unas ciertas dimensiones resuena a una determinada frecuencia, según el diseño de la
misma. Parte de esa onda resonante se extrae a través de una antena conectada con la
cavidad a través de una guı́a de onda. Si la diferencia de potencial que excita la salida
de los electrones del filamento se activa y se interrumpe de manera alternante gracias a
la operación de un modulador 2 , se generará un tren de pulsos. Dado que la frecuencia
queda fijada por la resonancia generada en la cavidad en un régimen casi transitorio, dicha
frecuencia no es realmente una constante sino que presenta una cierta deriva. Por ello se
2
Un modulador es una red capaz de generar pulsos cuadrados de alto voltaje DC en lo que en nuestro
contexto es la banda base.
José Luis Álvarez Pérez
13
suelen generar pulsos muy cortos, ya que los pulsos largos en el tiempo tienen un ancho
de banda inferior y esa deriva resulta mucho más notoria. Los magnetrones tienen la capacidad de producir ası́ potencias de pico muy altas pero potencias promedio bajas. Las
potencias de pico varı́an entre 1 kW y varios MW. En caso de no usar señales pulsadas,
un magnetrón de onda continua CW puede alcanzar una potencia de hasta 2 kW para el
caso de los hornos microondas 3 o 25 kW para instrumentos industriales.
Los magnetrones se usaron originalmente en los primeros radares de búsqueda de los
aviones. En un primer momento los radares se adaptaron a lo que un magnetrón podı́a
hacer. Un ejemplo clásico es el denominado 5J26, que se ha usado surante más de cuarenta
años. Opera en banda L y se puede ajustar mecánicamente para emitir entre 1.25 y 1.35
GHz. Su potencia de pico es de 500 kW con una duración de pulso de 1 µs con una PRF de
1kHz, o 2 µs de duración y una PRF de 500 Hz, donde cualquiera de las dos corresponde
a un ciclo de trabajo de 0.001 y proporciona 500 W de potencia promedio. Una eficiencia
del sistema del 40% es un valor tı́pico para un magnetrón. Las duraciones de 1 o 2 µs
proporcionan una resolución en alcance de 150 y 300 metros respectivamente. Cuando
se hablaba de volar bajo para no ser detectado por los radares se aludı́a al hecho de que
volando a 100 metros del suelo, por ejemplo, no era posible distinguir el retorno del suelo
del correspondiente al avión 4 . Sin embargo, un radar MTI está ideado para separar la
señal que tiene un cierto desplazamiento Doppler y, por lo tanto, corresponde a un blanco
en movimiento y cual no. Aunque un magnetrón no es en absoluto una fuente RF ideal
para un radar MTI, se han usado magnetrones para MTIs y se ha conseguido con ellos una
cancelación de hasta 30 o 40 dBs de retorno de blancos de fondo no deseados (en inglés,
a esta componente se la llama clutter). Podrı́a parecer sorprendente que los magnetrones
se puedan usar como fuentes RF suficientemente estables para utilizar la fase y ası́ medir
el desplazamiento Doppler. La fase de comienzo de cada pulso es totalmente arbitraria
en un magnetrón, de manera que la solución consiste en utilizar un oscilador coherente o
equivalente que sea capaz de permitir registrar el valor de la fase emitida en cada pulso
de manera que se pueda utilizar para corregir la medida en recepción o, mejor dicho, en
el procesado de recepción. Los magnetrones aún se utilizan en los radares de navegación
marina por su bajo coste y sus pequeñas dimensiones.
Las limitaciones del magnetrón hicieron que se buscasen soluciones basadas en la generación de una señal a un nivel bajo de potencia, y que posteriormente fuese amplificada.
El magnetrón no es un amplificador sino un tipo de oscilador 5 cuyo input es simplemente
una potencia Dc y no una forma de onda. Una cadena de amplificadores proporciona
coherencia de fase entre pulsos y estabilidad y exactitud en la frecuencia de trabajo con la
que facilita la codificación y compresión de pulsos. El klystrón 6 es una cavidad basada en
3
Es interesante resaltar el hecho de que si se usa un horno microondas vacı́o, las ondas generadas por la
antena sobre el horno se reflejan en este y vuelven al magnetrón dañándolo potencialmente. Si la masa del
agua del objeto calentado es muy baja conviene poner un vaso de agua en el interior del horno para evitar
esas reflexiones. Los hornos microondas funcionan tı́picamente a 2.45 GHz, que es una de las frecuencias
de absorción del agua.
4
Además, lógicamente, el otro motivo para volar bajo es estar cubierto por la lı́nea del horizonte
5
De hecho, un magnetrón alimenta lo que llamamos un POT (Power Oscillator Transmitter), frente a
lo que es un transmisor que utiliza un amplificador y que llamamos PAT (Power Amplifier Transmitters)
6
No confundir con el krytrón, que es un conmutador de gran velocidad usado en la activación de los
14
Introducción a los Sistemas Radar
un principio como el magnetrón, es decir, en la aceleración de electrones excitados fuera
de un filamento caliente por la presencia de un cátodo y un ánodo, en un confinamiento
magnético de los mismos y en la presencia de cavidades resonantes. Sin embargo, añade un
elemento: la velocidad de los electrones cuyo movimiento produce las ondas RF estacionarias en la cavidad resonante es modulada por la introducción de la señal de baja potencia
que queremos amplificar. Como se ha dicho antes, Alemania desarrolló su tecnologı́a radar
basándose en el klystrón durante la II Guerra Mundial, y se puede decir que a fecha de
1940 era la nación involucrada en el conflicto con la tecnologı́a radar más avanzada. Sin
embargo, no le dieron la debida importancia estratégica y los ingleses sacaron más partido
de su tecnologı́a, aunque esta fuese más limitada.
El klystrón es usado modernamente por su alta ganancia y gran eficiencia, que permiten
que sea la fuente de RF de mayor potencia de pico y promedio. Su limitación desde un
principio fue la estrechez de su ancho de banda, que en los años 50 aún no sobrepasaba el
1%. Sin embargo, gracias al uso de software de optimización para el diseño de la cavidad
resonante y del uso de más de una cavidad en un mismo klystrón, de manera que se
alcanzan valores del 8 al 10%. La buena estabilidad frecuencial lo hacen adecuado para el
procesado Doppler. Cuando los potenciales DC usados son muy altos, es necesario aplicar
un aislante contra los rayos X. De hecho, se pueden utilizar también como parte de los
aceleradores lineales empleados en medicina nuclear o radiologı́a y en fı́sica de partı́culas.
Más en la lı́nea de las aplicaciones más semejantes al radar, se usa en los satélites de
comunicaciones 7 .
Los tubos de ondas progresivas o TWT (travelling wave tubes) tienen unos valores
inferiores de potencia de trabajo, ganancia y eficiencia. Sin embargo, tienen anchuras de
banda superiores a los klystrones, del orden incluso de una octava. Si se usan para sus
valores más altos de potencia posibles, el ancho de banda disminuye aunque sigue siendo
bastante considerable, del 10 al 15%. Un hı́brido entre un TWT y un klystron recibe
el nombre de twystron. Otro tipo de amplificadores que se pueden describir como una
combinación de los principios del magnetrón en este caso y de los TWTs son los CFAs
(cross-field amplifiers).
Los amplificadores de estado sólido son capaces de producir fácilmente anchos de banda
grandes, funcionan con voltajes DC bajos, son muy estables en su output frecuencial,
son más fáciles de mantener que los anteriores y tienen una larga vida. Dado que son
dispositivos de baja potencia es necesario utilizar muchos combinados para que el output
tenga suficiente potencia en el caso de alimentar un radar. Además, para conseguir una
eficiencia razonable 8 , han de funcionar según ciclos de trabajo altos, lo que implica la
generación de pulsos largos, que necesitarán compresión. Mientras los amplificadores u
detonantes de armas nucleares y en las fotocopiadoras.
7
En la página divulgativa ”Best of What’s New 2007”, se incluı́a una empresa que hace uso de un
klystron para convertir los hidrocarburos que se encuentran en los deshechos de la industria del automóvil,
carbón de tipo hulla, pizarras bituminosas o arenas de alquitrán en gas natural o gasóleo
8
La eficiencia en dispositivos de estado sólido en alta potencia es en principio baja, ya que el problema
de disipación de calor presente, por ejemplo, en un chip, se acrecienta ya que aquı́ se está trabajando a
potencias más altas. Esto obliga a mantener una cierta separación entre los transistores, muy superior a
la propia de los circuitos integrados de uso lógico, y por tanto la disipación en las lı́neas de transmisión
que los conectan aumentan
José Luis Álvarez Pérez
15
osciladores de tubo trabajan normalmente en regimen de saturación, los de transistores
operados en lo que se llama clase A por ejemplo permiten utilizar las caracterı́sticas de
linealidad para modular la amplitud o utilizar antenas activas. Los mismos transistores
que operan en la configuración circuital de clase C por contra son no lineales pero también
se encuentran a menudo ya que son auto pulsados y no necesitan modulador. Cuando no
hay linealidad, también aquı́ se suele trabajar en régimen de saturación.
La tecnologı́a de los dispositivos de estado sólido se ha impuesto a la de los tubos de
vacı́o en el campo de la baja potencia claramente, incluso y últimamente en el último en
el caso de los tubos de rayos catódicos CRT (cathodic-ray tubes), superados por los TFTs
(thin film transistors). Aunque los dispositivos basados en tubos de vacı́o se siguen usando
en muchı́simos radares operacionales, la tecnologı́a basada en dispositivos de estado sólido
se ha convertido en una alternativa completamente viable en el campo del radar.
La señal RF del transmisor se entrega a la antena a través de una guı́a de onda u
otra forma de lı́nea de transmisión. Las antenas suelen ser reflectores parabólicos de giro
mecánico, agrupaciones planas de giro igualmente automático o agrupaciones de antenas
controladas por fase 9 y capaz de girar el diagrama de antena electrónicamente.
Lo más frecuente es emplear la misma antena en transmisión y recepción. Este reparto
temporal de funciones se consigue con la operación temporal de un duplexador. El duplexador es habitualmente un dispositivo gaseoso que produce un cortocircuito o arco voltaico
cuando el transmisor está transmitiendo. Este arco voltaico se produce gracias a la alta
potencia del transmisor y al uso de un gas cuyo valor de ruptura dieléctrica es relativamente bajo. En recepción, el duplexador dirige la señal hacia el receptor y no hacia el
transmisor. Este tubo de transmisión-recepción (T/R) se desioniza rápidamente una vez
el pulso del transmisor ha cesado, de manera que las señales recibidas no llegan al transmisor. El sistema incluye un limitador 10 para proteger al receptor de cualquier filtración
de potencia a través de los tubos T/R durante la transmisión. El limitador también protege el receptor de señales de otros radares que pueden no ser tan fuertes como disparar
la ionización de los tubos pero sı́ para dañar el receptor. Junto a los duplexadores de
tubo, existen duplexadores basados en circuladores de ferrita. Debido a las reflexiones en
la antena que también vuelven sobre el receptor es necesario complementar el circulador
de ferrita con un tubo T/R y un limitador.
El receptor es casi siempre un receptor superheterodino 11 .Ası́, los receptores, después
9
La tecnologı́a de los phased-arrays fue desarrollada con la contribución de Luis Walter Álvarez, fı́sico
estadounidense nieto de un médico asturiano emigrado a EEUU. Además de desarrollar esta tecnologı́a
como parte de un sistema de aterrizaje de aeronaves en condiciones de niebla, dirigió la construcción del
primer acelerador lineal de protones, es autor de la teorı́a de extinción de los dinosaurios por la colisión
de un meteorito en Méjico, desarrolló un sistema de rayos X para observar el interior de las pirámides de
Egipto y voló en un avión de apoyo del Enola Gay sobre Hiroshima al mando de los instrumentos que
midieron las consecuencias de la detonación y consiguiente masacre. En 1968 recibió el premio Nobel de
Fı́sica
10
Un limitador es un circuito que permite, mediante el uso de resistencias y diodos, eliminar tensiones
que no nos interesa que lleguen a un determinado punto de un circuito, en este caso aquellas que superan
un determinado valor de tensión.
11
El nombre completo en inglés es supersonic heterodyne receiver y a veces se usa la abreviación superhet.
Los receptores superheterodinos mezclan o heterodinan la señal entrante con una de frecuencia ligeramente
desplazada generada en un oscilador local. Un receptor homodino mezcla la señal entrante con una generada
16
Introducción a los Sistemas Radar
de amplificar la señal RF 12 la mezclan con la del oscilador, trabajaran con una frecuencia
intermedia (IF, intermediate frequency), donde los filtros pueden alcanzar un factor de
calidad Q más alto, es decir, seleccionar un ancho de banda más estrecho y donde una
segunda etapa de amplificado no se acoplará con la primera 13 Además, en el caso de usar
un conversor analógico-digital al final de la cadena, conviene trabajar a IF donde la señal
se puede muestrear mejor con tecnologı́a más accesible. Una limitación a la hora de bajar
la frecuencia es la presencia del llamado ruido de fase, que es inversamente proporcional
a la frecuencia y que precisamente hace conveniente en primer lugar transmitir en altas
frecuencias.
El primer tramo de la cadena del receptor, previa al mezclador, y que llamamos de
bajo ruido, puede omitirse en el radar. Un receptor que arranca con un mezclador tendrá
menor sensitividad radiométrica, es decir, tendrá más ruido, ya que la figura de ruido es
más alta en el mezclador que en el amplificador RF, y como veremos el dispositivo que más
influye en la figura de ruido de una cadena es el primero. Por otro lado ası́ se consigue
aumentar el rango dinámico y será menos susceptible a las interferencias debidas a las
contramedidas a las que un radar militar puede verse sometido. El motivo por el que el
rango dinámico aumenta es porque el filtro IF limita mucho más el ancho de banda que el
que precede al de RF, de manera que es más difı́cil saturar dicho amplificador IF que el
de RF. La saturación del segmento de la cadena posterior al mezclador se podrı́a producir
también, además de por la entrada de energı́a en la ventana frecuencial que permite el
filtro que precede al amplificador RF, por la distorsión de intermodulación que se produce
por la mezcla no deseada de armónicos de las señales que están presentes en la cadena.
Un ejemplo es la mezcla de un armónico de la señal del oscilador con un armónico de la
señal recibida y se llama respuesta espúrea del mezclador. Otro ejemplo es la mezcla de
los armónicos dos frecuencias, f1 y f2 , dentro del paso-banda de la señal tales que 2f1 − f2
está también en ese rango frecuencial. Este tipo de intermodulación se denomina de tercer
orden.
El mezclador es un elemento clave del receptor, pues como hemos dicho, nos permite
hacer la llamada down-conversion de RF a IF. Si esta conversión se produce en un solo
paso, se dice que es simple, pero a veces se produce en dos pasos, con lo cual hay dos
mezcladores y dos amplificadores IF y se denomina conversión dual. Esta última nos
permite trabajar finalmente con un ancho de banda más estrecho, en el cual disminuye la
probabilidad de intermodulación y hace posible por tanto que el rango dinámico sea mayor
al disminuir la probabilidad de saturación. Si la frecuencia entrante en el mezclador tiene
un valor fRF , y el mezclador funciona con un oscilador a frecuencia fosc , las frecuencias
resultantes serán fRF ± fosc , siendo la frecuencia fIF = fRF − fosc la elegida como IF a
través del subsiguiente filtro. Sin embargo es posible obtener fIF como mezcla de una señal
en el oscilador local a la misma frecuencia que la portadora.
12
Los amplificadores RF de estado sólido son transistores bipolares de sı́lice para las frecuencias más
bajas y de efecto campo para las frecuencia más altas.
13
Si realizamos la amplificación a una misma frecuencia, dado que habrá que realizarla con una cadena
de amplificadores -es necesario obtener una ganancia de más de 100 dB, algo que no está al alcance de un
solo amplificador-, tendrı́amos una potencia reflejada a aquellas frecuencias en las que la adaptación no es
perfecta.
José Luis Álvarez Pérez
17
de inferior frecuencia finterf y la del oscilador local si fIF = fosc − finterf . Esta frecuencia
finterf se denomina imagen y a veces se coloca un filtro delante del amplificador RF que
elimina esta componente y entonces se dice que el filtro es de rechazo de imagen. Otra
manera de rechazar la imagen es en el propio mezclador, que entonces se llama de rechazo
de imagen 14 .
Después del mezclador se sitúa un filtro IF que elimina la frecuencia fRF +fosc , seguida
de un amplificador IF. Como hemos dicho, esta etapa podrı́a estar duplicada en un receptor
de conversión dual. El amplificador en IF se diseña para que funcione como un filtro
adaptado, es decir, un filtro que optimice la relación señal-ruido. Ası́ se consigue maximizar
la detectabilidad del eco, muy débil, frente a la presencia de otras componentes no deseadas
en la señal. Después del amplificador o amplificadores IF encontramos el demodulador o
segundo detector 15 que nos permite separar la modulación de la señal de la portadora,
seguido de otro amplificador, este ya sobre la señal en banda base o señal de video. En
lugar de un detector de la portadora, en otros casos como el radar MTI, el detector lo es
de la fase, como veremos más adelante. En los primeros radares el resultado era observado
en una pantalla de rayos catódicos. En los radares modernos la fase de detección se realiza
después de introducir un conversor analógico digital (A/D converter) que transforme la
señal de video analógica en una señal discreta. El rendimiento del conversor A/D depende
14
El principio del mezclador de rechazo de imagen consiste en utilizar dos mezcladores, uno desfasado 90
grados con respecto al otro -en el diagrama se denomina a este segmento de la cadena RF unión hı́brida-,
de manera que si la señal entrante
ŝ(t) = s(t) + sim (t)
s(t) = a(t) cos[2πfRF t + φ(t)] = sI (t) cos(2πfRF t) + sQ (t) sin(2πfRF t)
sim (t) = sI im (t) cos(2πfim t) + sQim (t) sin(2πfim t)
sI (t) = a(t) cos[φ(t)]
sQ (t) = a(t) sin[φ(t)]
se reparte por dos caminos, al mezclarse con las dos señales desfasadas, produce
im
ŝ(t)IF
(t)] sin(2πfIF t) − [sQ (t) + sQim (t)] cos(2πfIF t)
+π/2 = [sI (t) − sI
ŝ(t)IF = [sI (t) + sI im (t)] cos(2πfIF t) + [sQ (t) − sQim (t)] sin(2πfIF t)
fIF = fRF − fosc = fosc − fim
Una segunda unión hı́brida introduce ahora un desfase de −π/2 en la lı́nea donde antes se mezclaba la
señal entrante con la del oscilador desfasado +π/2, lo que produce
im
ŝ(t)IF
(t)] cos(2πfIF t) + [sQ (t) + sQim (t)] sin(2πfIF t)
+π/2,−π/2 = [sI (t) − sI
ŝ(t)IF = [sI (t) + sI im (t)] cos(2πfIF t) + [sQ (t) − sQim (t)] sin(2πfIF t)
donde hemos utilizado
sin(ψ − π/2) = cos ψ
cos(ψ − π/2) = − sin ψ
Evidentemente, si sumamos ahora las dos señales de las dos lı́neas conseguimos eliminar la señal imagen.
15
El detector más simple serı́a un rectificador de tipo diodo. Antiguamente se denominaba primer
detector al mezclador. Aunque esto ya no es común, el demodulador se sigue llamando segundo detector.
18
Introducción a los Sistemas Radar
del número de bits con el que se cuantiza la señal y de la velocidad de muestreo que posee.
El número de bits decrece con el ancho de banda, es decir, con la velocidad de muestreo.
Esto se debe a que el ruido es proporcional al ancho de banda y por tanto la sensibilidad
para detectar un pequeño cambio de la señal disminuye.
Otro aspecto importante que hay que tener en cuenta es lo que se denomina control
de ganancia. En un receptor radar, la señal entrante puede variar mucho en intensidad y
esto dificulta saber cómo regular la ganancia. Existen diversos métodos de controlar este
valor de ganancia. La primera manera se llama control temporal de sensitividad (STC,
sensitivity time control), que consiste en un crecimiento de la ganancia en el receptor con
el tiempo una vez que el pulso ha sido transmitido. Ası́, los pulsos que tarden más tiempo
se amplificarán más. De acuerdo a la ecuación de radar tal y como la hemos visto, la ley
que sigue la atenuación que sufre la señal del retorno depende del alcance R como R4 , lo
que da una primera indicación del tipo de ley exponencial que se puede implementar. En
la práctica, muchas veces es el hardware el que decide la ley de ganancia. Por ejemplo, si
utilizamos la carga de un condensador la ley será del tipo exp(k t). Otra opción es usar
un mecanismo de control automático de ganancia (AGC, automatic gain control), donde
un circuito más complejo regula la ganancia de los amplificadores dependiendo del nivel
de señal. Un tercer método es el uso de un amplificador logarı́tmico, que no se puede
saturar a cambio de perder sensibilidad según elevamos la intensidad 16 . Por último, otro
ejemplo es el de un método aplicable al caso de radares fijos que rotan cubriendo una
zona determinada. Estos radares pueden regular su nivel de ganancia dependiendo de la
zona que están barriendo en un momento dado, de acuerdo a las medidas efectuadas de
la llamada señal de clutter, es decir, de la señal de fondo debida a las montañas y demás
objetos fijos. Se pretende en este caso que estas señales de retorno fijas no saturen nuestro
receptor.
Con respecto al problema de la saturación del receptor, un último comentario en esta
sección lo dedicamos a la posible saturación de la parte del receptor que trata con la señal
de video. Incluso si las ganancias de la parte de IF se regulan para impedir la saturación,
es posible que esta ocurra a nivel de la de video. Por ello se suele introducir un limitador
IF delante del detector. También se protege ası́ el conversor analógico digital.
La última parte de un sistema radar es la pantalla donde se refleja el resultado de las
medidas de los ecos que realiza el receptor. La salida más primitiva de resultados en los
primeros radares era simplemente un indicador del nivel de la señal de video directamente.
Una manera clásica de representar la señal es el indicador de plan de posición (PPI, plan
position indicator). Se trata de una pantalla circular que representa de manera polar el
alcance y el ángulo de acimut y una lı́nea que rota siguiendo la rotación del radar. La
pantalla, originalmente un tubo de rayos catódicos, tenı́a un material de fósforo de larga
permanencia, de manera que la señal del eco persistı́a un tiempo después del paso de la
lı́nea rotatoria. Otro ejemplo de representación es el A scope, que permite ver un eje
cartesiano donde la coordenada x corresponde al alcance y la y a la intensidad de la señal.
El B scope despliega información, también en coordenadas cartesianas, pero de las dos
16
En el campo de la acústica, el oı́do es un receptor logarı́tmico, lo que permite a los animales ser
sensibles a un rango enorme de diferentes grados de ondas de presión
José Luis Álvarez Pérez
19
a)
b)
d)
e)
c)
f)
Figure 1.3: (a) En esta representación del tipo A scope vemos los retornos de un blanco
que se mueve; (b) Entfernungsmarke= Lı́neas de distancia fija, Winkelmarke= lı́neas de
acimut fijo, Ziele= Blancos, Festziele= Puntos reflectores de fondo; (c) Representación del
RHI scope; (d),(e),(f) Tres ejemplos de representaciones PPI
variables del PPI, esto es, el acimut y el alcance. El RHI scope (range height indicator)
representa de nuevo en cartesianas el alcance y la altura del blanco, y es útil en radares
dedicados a obtener la información de altura. En los radares modernos que se benefician
de la computerización del radar despliegan una gran cantidad de datos si el movimiento
de la antena lo permite. Esta última categorı́a de representación se denomina raster scan
monitor.
1.4
Frecuencias radar
Los radares convencionales funcionan en lo que se llama la región de microondas, un
término con cierta flexibilidad. Las frecuencias más usadas se encuentran en el rango que
va de los 100 MHz a los 36 GHz, lo que cubre más de ocho octavas. Algunos radares
operan a unas frecuencias tan bajas como unos pocos megaherzios y otros superan los 240
GHz 17
Durante la II Guerra Mundial se dieron nombres como S, X o L a las distintas ban17
Estos operan a frecuencias que corresponden a una longitud de onda de unos cuantos milimetros. Estos
encuentran aplicación, por ejemplo, en el estudio de las nubes, formadas por gotas de agua, que tienen
tı́picamente diámetros de que van de la micra a 0.1 mm.
20
Introducción a los Sistemas Radar
das de frecuencia. Aunque la motivación era mantener un lenguaje clasificado, su uso ha
perdurado hasta hoy. En la tabla incluimos la designación oficial de acuerdo al estándar
IEEE. Están relacionadas con las asignaciones dadas por la ITU (International Telecommunications Union), que es la que administra el uso del espacio electromagnético. Ası́ por
ejemplo, la banda L abarca de 1 a 2 GHz, pero solamente se puede usar para aplicaciones
radar dentro del margen que va de 1.215 a 1.4 GHz. Esto siempre viene motivado por el
conflicto de intereses tecnológicos o cientı́ficos con otros dispositivos o fenómenos 18 . Otro
convenio de letras se emplea a veces en el contexto de guerra electrónica 19 .
Veamos ahora un pequeño resumen del uso de las frecuencias:
• HF (3 a 30 MHz). Estas fueron las frecuencias que utilizaron los británicos justo
antes de la II Guerra Mundial para sus radares operacionales. Tiene bastantes
desventajas, como la necesidad de utilizar antenas muy grandes para conseguir que
las anchuras de haz de los diagramas de radiación fuesen suficientemente estrechos,
la gran cantidad de ruido ambiental que existe actualmente a estas frecuencias y la
reducida sección recta radar que suelen tener muchos blancos comparada con la que
tienen a frecuencias de microondas.
Los británicos emplearon estas frecuencias ya que a pesar de sus limitaciones la
tecnologı́a de generación de potencias altas estaba disponible. Consiguieron alcances
en torno a los 300 km y el uso de estos radares fue decisivo en la batalla de Inglaterra.
Una ventaja que sı́ existe a estas frecuencias es la posibilidad de aprovechar la reflexión de estas ondas en la ionosfera para su uso en la detección de blancos más
allá del horizonte. De todas maneras, como la reflexión se produce más allá de un
cierto ángulo de incidencia (para ángulos muy próximos a la vertical las ondas electromagnéticas atraviesan la ionosfera), hay una cierta zona de salto que no se puede
ver.
• VHF (30 a 300 MHz). Se empezó a trabajar en estas frecuencias desde los años 30.
Su desarrollo supuso un gran impulso a la tecnologı́a. Actualmente, nos encontramos
con los mismos problemas que con HF: esta zona del espectro está muy utilizada
para otras finalidades, los anchos de haz no son demasiado estrechos, el ruido externo
es grande y las anchuras de banda son pequeñas. Tiene también ventajas, como
por ejemplo la insensibilidad a la lluvia. Gracias a la onda de superficie, podemos
conseguir alcances muy grandes. Además la ionosfera es transparente y permite que
se usen radares a esta frecuencia para detectar la posición de satélites, por ejemplo.
Otra ventaja es que resulta muy difı́cil reducir la sección recta radar de un avión a
estas frecuencias con lo que son adecuadas para la detección de los mismos. El coste
18
En el caso de la banda L la frecuencia de 1.57542 GHz se usa para la señal civil de GPS -aunque la
señal militar, de 1.2276 cae en el dominio que hemos trazado para el radar- y la frecuencia 1.42040575
GHz es una frecuencia de interés cientı́fico en radioastronomı́a porque corresponde una cierta emisión de
los átomos de hidrógeno en el universo.
19
Por ejemplo, existen inhibidores en banda J a pesar de que no hay radares en banda J. Se trata de
una dispariedad en el uso de las denominaciones, ya que obviamente hay radares que operan en la banda
que se denomina J en el campo de las contramedidas de guerra electrónica o EW (electronic warfare)
José Luis Álvarez Pérez
21
Figure 1.4: Caracterı́sticas de propagación a diferentes frecuencias. Existe una skip zone
que no se puede alcanzar mediante el uso de la reflexión ionosférica.
tecnológico a la hora de construir un radar a VHF es bajo. Sin embargo, no se usan
mucho.
• UHF (300 a 1000 MHz. La mayor parte de las cosas que hemos dicho para VHF
se aplican también para UHF, pero aquı́ el ruido es inferior y es más fácil conseguir
haces más estrechos. Los efectos meteorológicos son bajos también. Con una antena
suficientemente grande, son adecuados para la detección de objetos que se mueven
fuera de la atmósfera, como por ejemplo misiles balı́sticos o sondas espaciales. Aquı́
se pueden usar de manera conveniente amplificadores de estado sólido que permiten
conseguir anchos de banda mayores.
• Banda L (1 a 2 GHz). Esta es la banda preferida para radares de tierra de
vigilancia a grandes distancias, como por ejemplo los de control aéreo. Existen
radares militares de los denominados 3D 20 a esta frecuencia.
• Banda S (2 a 4 GHz). Según se sube en frecuencia, el alcance es inferior ya que el
efecto de la Tierra y de la ionosfera están ausentes -si actuaran ambas conjuntamente
tendrı́amos un fortalecimiento del tipo del que existe en una guı́a de onda. Además
la atmósfera se convierte en un medio que dificulta la propagación en la medida en
que, por ejemplo, la lluvia refleja parte de la señal y esto también reduce el alcance.
Por contra, precisamente, esto la hace de interés para detectar esta misma lluvia y
es una elección tı́pica para los radares meteorológicos. La mayor estrechura del haz
hace posible que se consiga muy buena resolución angular. Es también adecuada
para la vigilancia aérea de corto alcance, por ejemplo, en los aeropuertos. También
a esta frecuencia se construyen radares militares 3D.
En general las frecuencias por debajo de la banda S se usan para vigilancia aérea y
la detección de objetos sin intención de obtener información más allá del alcance y la
posición, mientras que las frecuencias a partir de la banda S permiten obtener más
información, como el reconocimiento de blancos individuales o de sus caracterı́sticas
20
Los radares 3D proporcionan información en las tres dimensiones (elevación, alcance y acimut), en
lugar de en dos solamente como muchos radares
22
Introducción a los Sistemas Radar
geométricas y eléctricas. Un equilibrio entre ambas aplicaciones, vigilancia aérea y
mayor precisión en la caracterización de la señal, se consigue precisamente en esta
banda S.
• Banda C (4 a 8 GHz). A esta frecuencia se construyen radares que permiten el
seguimiento preciso de misiles a gran distancia ası́ como radares a bordo de satélites
para la observación de la Tierra. A estas frecuencias resulta tecnológicamente
accesible y práctico el uso de agrupaciones de antenas con control electrónico de
movimiento de haz.
• Banda X (8 a 12.5 GHz). Esta banda se utiliza mucho en el campo militar, por su
buena resolución (recordemos que la resolución espacial es proporcional al cociente
longitud de onda/dimensiones de la antena), ası́ como navegación marı́tima, aérea y
control de velocidad en tráfico. Los radares a esta frecuencia son más pequeños que
a frecuencias inferiores y esto los hace muy adecuados para aplicaciones donde la
movilidad y el bajo peso son condiciones necesarias. Sus dimensiones varı́an desde a
tamaños que permiten sujetarlos en la mano hasta radares con antenas de 30 m de
diámetro. Se pueden conseguir anchos de anda muy grandes lo cual permite procesar
la señal del eco de manera más compleja (p. ej.: mediante compresión del pulso).
Estas frecuencias son bastante sensibles a la lluvia.
• Bandas Ku , K y Ka (12.5 a 40 GHz). En la II Guerra Mundial se experimentó
con la frecuencia de 24 GHz pero resultó ser una mala elección, dada su cercanı́a a
los 22.2 GHz, que es una frecuencia de absorción del agua. Posteriormente, dejando
la banda K entre 18 y 27 GHz, se dividió el espectro en las bandas Ku y Ka como
las bandas que quedaban por debajo y por encima de 22.2 GHz. El interés de estas
frecuencias es su alta resolución, pero es dificil generar y transmitir altas potencias.
Los efectos de atenuación en lluvia son grandes en banda K. Se suelen usar radares
en banda Ku para el control de tráfico rodado en los aeropuertos por la necesidad
de alta resolución y porque no se requiere un gran alcance.
• Longitudes de onda milimétricas (¿ 40 GHz). Aunque la longitud de onda
de la banda Ka llega a 8.5 mm si la frecuencia es de 35 GHz, la tecnologı́a implicada en la banda K es la tı́pica de microondas, mientras que a longitudes de onda
milimétricas las soluciones tecnológicas para conseguir fuentes de potencia altas y
lı́neas de transmisión de bajas pérdidas. A estas frecuencias que van de 40 a 300
GHz la atenuación es muy alta debido a la absorción por parte de las moléculas de
oxı́geno de la atmósfera, que tiene un pico a 60 GHz. Se suele experimentar en la
zona de los 94 GHz pero incluso a esta frecuencia la atenuación es más alta que a
22.2 GHZ donde hay una lı́nea de absorción del agua. Su interés se debe a su alta
resolución y se puede pensar en aplicaciones de muy corto alcance.
• Frecuencias laser. El laser es un tipo de sensor basado en los mismos principios del
radar pero implementado en una tecnologı́a muy diferente, que trabaja a frecuencias
infrarojas, visibles y ultravioletas. Se puede alcanzar un alto grado de coherencia y
potencia transmitida. Permiten lógicamente una resolución muy alta que les hace
José Luis Álvarez Pérez
23
muy adecuados para aplicaciones de alta precisión. No tienen utilidad en aplicaciones
de vigilancia por la extrema estrechura de su haz y son muy sensibles a los efectos
de absorción en condiciones de lluvia, nubes o niebla, pero precisamente por eso son
útiles en las aplicaciones de perfilado atmosférico.
1.5
Aplicaciones del radar
La mayor parte de las aplicaciones radar se centran en su uso para la detección de blancos
en mar, aire o tierra. Los tipos fundamentales de radar quedan enumerados a continuación:
1. Militar. Tanto en su uso en sistemas de defensa aérea o reconocimiento desde el
aire o el espacio como en la guı́a de misiles este es un instrumento fundamental en
la tecnologı́a de guerra. La mayor parte de las aplicaciones civiles tienen su versión
militar.
2. Observación de la Tierra y los planetas. Se dedican a observar escenas de
interés medioambiental, a cartografiar topografı́as o caracterizar los llamados observables geofı́sicos. Un ejemplo de su uso en el estudio de otros planetas es el uso
que se hizo del uso de un radar de apertura sintética en la misión Magallanes a
Venus entre los años 1990 y 1992 o del SAR a bordo de la sonda Cassini-Huygens
para el estudio de la superficie del satélite Titan de Saturno que se está usando
actualemente.
3. Control del tráfico aéreo. Se usan en el control aéreo en la vecindad del aeropuerto y en el seguimiento de la ruta de un aeropuerto a otro desde el suelo ası́ como
en tráfico sobre las pistas y el trayecto llamado de taxi.
4. Control de tráfico rodado. Se usa para vigilar la velocidad de tránsito de los
vehı́culos en las carreteras. El tipo más moderno dentro de esta categorı́a es el de
los radares a bordo de los vehı́culos para apoyar en la navegación y prevención de
accidentes.
5. Seguridad aérea y navegación. Se trata de los radares a bordo de las aeronaves
de aviación civil que permiten asistir al piloto en su navegación. Se incluye en esta
categorı́a el radar de tipo altı́metro, que indica la altura del aparato. En el campo
militar esto permite asistir en el vuelo rasante.
6. Seguridad naval. Los radares de navegación naval son fundamentales bajo condiciones de niebla o de poca visibilidad. Permiten detectar la cercanı́a de otros barcos
o la orientación localizando boyas.
7. Meteorologı́a.
8. Espacio. Los vehı́culos espaciales hacen uso del radar para las maniobras de
acoplamiento. También se utilizan radares desde el suelo para seguir la trayectoria de los mismos.
24
Introducción a los Sistemas Radar
9. Astronomı́a. La astronomı́a radar ha ayudado para comprender la naturaleza de
los meteoritos, en el ámbito más cercano a la Tierra, y para estudiar la Luna y
los planetas más cercanos antes de que fuese posible el envı́o de sondas espaciales.
También se han usado para medir las distancias dentro del sistema solar.
10. Otros. El radar se utiliza también en la industria para medir distancias y velocidades sin establecer contacto fı́sico con el objeto. También se emplea en labores
de prospección petrolı́fera o de gas natural. Un uso curioso es el de detección del
movimiento de enjambres de insectos o bandadas de pájaros.
Chapter 2
La ecuación radar
La ecuación radar tal y como la hemos introducido en el capı́tulo anterior tiene la forma
Pr =
Pt G(θ, φ) Ae
σ
(4πR2 )2
(2.1)
y nos daba el alcance máximo
Rmax =
h P G(θ, φ) A i1/4
t
e
σ
(4π)2 Smin
(2.2)
a partir de la potencia transmitida Pt , la ganancia de la antena G, la apertura eficaz de
la antena Ae , la sección recta radar σ y el nivel de potencia mı́nimo detectable Smin . El
interés de esta ecuación es triple:
• permite evaluar el rendimiento de un determinado sistema radar a partir de sus
caracterı́sticas y las del blanco que pretende identificar o describir,
• permite comprender los factores que condicionan y limitan diferentes objetivos no
siempre compatibles,
• permite definir los requisitos de un sistema necesarios para obtener determinadas
prestaciones
Esta ecuación no produce realmente el valor del alcance máximo real tal y como anticipamos en el capı́tulo anterior. Hay cuatro causas fundamentales que motivan este carácter
inexacto de la ecuación:
• El nivel mı́nimo de señal detectable es en realidad una cantidad estocástica, que
depende del ruido del receptor, y por tanto no se puede caracterizar con un valor
único y constante,
• También la cantidad σ tiene una naturaleza estocástica, además de un cierto factor
de incertidumbre, ya que al no pertenecer al sistema no tiene tampoco un valor
perfectamente determinado,
25
26
La ecuación radar
• Existen pérdidas en el sistema que no han sido incluidas en la ecuación,
• Los efectos de propagación tampoco han sido tenidos en cuenta.
Todo esto hace que la detección de una cierta potencia de eco sea una variable estocástica
ella también que no se puede representar con un valor único sino a través de una cierta
función estadı́stica. Ası́ pues, hablaremos de probabilidad de detección y probabilidad
de falsa alarma cuando nos refiramos a la recepción de un determinado eco que nosotros
hubiésemos supuesto que correspondı́a a un cierto blanco de una cierta respuesta reflectiva
dada por σ.
Partiremos en este capı́tulo de la ecuación (2.2) e incluiremos los factores que hemos
descrito brevemente arriba y que no forman parte de la misma.
2.1
Detección de señales bajo ruido. Relación señal-ruido
La operación de detección en una radar se basa en el establecimiento de un valor umbral
de señal de manera que si la potencia de eco recibida es superior a este valor, denominado
umbral de detección, se considera que se ha detectado un blanco. Dado que existe un
valor fluctuante de ruido en el circuito del receptor, es posible que blancos más débiles de
lo que en realidad se pretendı́a detectar superen este umbral si el ruido actúa de manera
constructiva y, por otro lado, motiven que un blanco que deberı́amos haber detectado se
pierda por una interferencia destructiva con el ruido, como se ve en la figura. Este último
fenómeno se denomina error de detección.
Desde el punto de vista de una señal con ruido, no tiene sentido hablar de una potencia
mı́nima detectable, como hemos visto, ya que no se trata de tener en cuenta la señal más
débil posible sino aquella que supera el umbral de detección definida arriba. Lo primero,
pues, es caracterizar de alguna manera cuánto ruido contiene el sistema. En realidad
existen varios tipos de ruido, pero de momento nos fijamos en el ruido térmico, que suele
dominar sobre los otros. El ruido térmico se debe a que el circuito tiene una temperatura
finita que hace que los electrones tengan una energı́a cinética asociada a su agitación
térmica. Este ruido también se llama de Johnson o de Nyquist. El ruido térmico se
caracteriza por ser un proceso estocástico ergódico y estacionario. Ahora veremos lo que
significan estos términos. Ser un proceso estocástico significa que no se puede representar
como una función analı́tica, es decir, que no tendrá una forma como un seno, por ejemplo.
Por el contrario, se puede describir solamente por una función de probabilidad, que es
un descriptor estadı́stico de primer orden, y por otras funciones como la correlación del
proceso entre dos puntos o dos instantes, que es un descriptor de segundo orden, junto con
descriptores de orden superior. Ya que la función del ruido no es analı́tica, como hemos
dicho, su espectro habrá que definirlo de manera diferente a como se hace para una señal
que sı́ lo es. De hecho, se define como la transformada de Fourier no de esa forma analı́tica,
que no existe, sino de la función de correlación estadı́stica que acabamos de mencionar y
que se define como
Z T
1
Cn (τ ) = lim
vn (t) vn (t + τ ) dt = hvn (t) vn (t + τ )i
(2.3)
T →∞ 2T −T
José Luis Álvarez Pérez
27
donde vn es la señal de voltaje medida debida a las fluctuaciones térmicas de los electrones
que estamos llamando ruido térmico. La transformada de Fourier por tanto es la que define
el espectro, o más exactamente densidad espectral de potencia
Z ∞
Cn (τ ) exp(−jwτ ) dτ
(2.4)
Sn (w) = F{Cn (τ )}(w) =
−∞
El ruido térmico tiene un espectro constante hasta frecuencias de 1000 GHz, y decrece por
encima de esta frecuencia. Esta constancia con la frecuencia hace que lo llamemos ruido
blanco. Y si Sn (w) es constante, entonces es que
Cn (τ ) = Cn δ(τ )
(2.5)
si atendemos a (2.4), donde Cn es esa constante independiente de la frecuencia. Se puede
demostrar que este valor es tal que
Sn (w) = Cn = hvn2 (t)i = 4kB T R
(2.6)
donde kB es la constante de Boltzmann y vale 1.38 10−23 Jul/K, T es la temperatura del
dispositivo resistivo y R es la resistencia del mismo. Esto significa que si T = 0 o si los
conductores son perfectos y R = 0.
Por ejemplo, si tenemos un componente con una resistencia de 1kΩ a una temperatura
de 300 K, la desviación estándar del voltaje del ruido térmico, que tiene media cero, es de
p
p
√
σn = hvn2 (t)i = 4 × 1.38 10−23 Jul/K × 300K × 1kΩ = 4.07 nV/ Hz
Para un determinado ancho de banda, el voltaje de ruido será
√
Vn = σn B
(2.7)
donde B es el ancho de banda. La potencia entregada a una carga por este “generador”
de ruido, será
Vn2
V2
P = In Rcarga =
Rcarga = n = kB T B
(2.8)
Zcarga + Z
4R
donde In es la intensidad de corriente generada por el ruido térmico y donde hemos
particularizado el caso para la condición de adaptación Zcarga = Z ? .
Existen otros tipos de ruido menos relevantes en general que reseñamos a continuación:
• Ruido de impulso o disparo (shot noise). 1 Consiste en las fluctuaciones de
la corriente en un conductor debidas al hecho de que la corriente consiste de cargas
discretas, los electrones, y ha de tener por tanto valores discretos o cuantizados. El
espectro de este ruido es semejante al del ruido término en que es constante con la
frecuencia. Es caracterı́stico de tubos de vacı́o, transistores y diodos. Este ruido
viene dado por la fórmula siguiente
p = 2qI RB
1
La International Telecommunication Union (UTI) lo registra como ruido de “granalla”
(2.9)
28
La ecuación radar
donde q = 1.6 × 10−19 culombios es la carga del electrón, I es la intensidad de la
corriente, R es la resistencia y B es el ancho de banda. Esta fórmula es válida para
frecuencias mucho menores que el recı́proco del tiempo de tránsito de un portador de
carga en el dispositivo. El tiempo de tránsito es el perı́odo que tarda un portador de
carga en pasar por dicho dispositivo. Dependiendo del dispositivo, la ecuación (2.9)
es válida para frecuencias de hasta unos cuantos MHz o incluso de hasta unos cuantos
GHz.
• Ruido de tiempo de tránsito. Enlazando con lo que describı́amos sobre el tiempo
de tránsito, precisamente cuando las frecuencias de trabajo se hacen comparables
con las correspondientes al recı́proco de este tiempo de tránsito, aparece un ruido
adicional que se debe a que los portadores de carga pueden pasar alternativamente
de un lado al otro del dispositivo, una unión p-n por ejemplo, durante su tránsito.
• Ruido de centelleo (flicker noise). Es un ruido inversamente proporcional a la
frecuencia (ruido rosa 2 ) que también está presente en los tubos de vacı́o y sobre todo
en los transistores y es mayor en los MOSFET que en los JFET o los transistores
bipolares. Sin embargo, no suele ser relevante por encima de frecuencias de 1 kHz.
• Ruido de fase. Es un tipo de ruido rosa tı́pico de los osciladores, que hace que la
frecuencia que generan no sea una frecuencia pura sino que contenga una modulación
de carácter ruidoso en la fase.
• Ruido de partición. Es similar al ruido de disparo en su espectro y en los mecanismos de generación, pero se presenta solamente en dispositivos donde una sola
corriente se separa en dos o más trayectorias. Un ejemplo son los transistores de
juntura bipolares (BJT), en donde la corriente del emisor es la suma de las corrientes
del colector y de la base. También ocurre en los tubos de vacı́o. No es, sin embargo,
un problema en los transistores de efecto campo (FET).
• Ruido de ráfaga (burst noise). Es tı́pico en los amplificadores monolı́ticos y
puede llegar a ser de varios microvoltios, manifestándose en forma de saltos que duran
unos milisegundos. Se presenta en materiales semiconductores. No es relevante por
encima de unos pocos kHz.
• Ruido de avalancha (avalanche noise). Es un tipo de ruido que se presenta
básicamente en aquellos dispositivos donde se generan voltajes muy altos que provocan colisiones de los portadores de carga con los electrones de valencia (más exteriores) de los átomos, que se separan de los mismos y se convierten en portadores de
corriente adicionales. Es caracterı́stico de los llamados diodos de avalancha.
Ahora que hemos visto que el ruido puede deberse básicamente al componente térmico
pero no exclusivamente, podemos definir la llamada figura de ruido como la relación entre
2
Se denomina rosa porque proporcionalmente tiene más energı́a en las frecuencias más bajas, de igual
manera que el rosa tiene una proporción más alta de rojo (extremo de frecuencias bajas del espectro visible)
que de blanco.
José Luis Álvarez Pérez
29
el ruido real de un dispositivo y el ruido ideal de origen únicamente térmico que ese mismo
dispositivo tendrı́a a una temperatura de 290 K
Fn =
Ruido real del dispositivo
Nout
=
Ruido térmico en el dispositivo a T=290 K
kB T0 BGa
(2.10)
donde Nout es el ruido presente a la salida del dispositivo, T0 = 290 K y Ga es la ganancia
disponible (available) del dispositivo, es decir, la que se produce cuando toda la cadena
está adaptada. Con una temperatura de 290 K, la cantidad kB T0 es 4 × 10−21 W/Hz, que
es más fácil de recordar que el valor de kB . Teniendo en cuenta que el ruido presente en la
entrada del dispositivo es kB T0 B si los dispositivos están en equilibrio térmico, es decir,
si están a la misma temperatura y que Ga = Sout /Sin , tenemos que (2.10) se puede poner
como
Sin /Nin
Fn =
(2.11)
Sout /Nout
lo que demuestra que el factor de ruido lo que mide es, en condiciones de equilibrio térmico,
cómo el dispositivo varı́a la relación señal-ruido. Arreglando la ecuación (2.11) podemos
poner que la señal mı́nima detectable es
Smin = k T0 B Fn
S
out
Nout
min
(2.12)
Ahora podemos poner la ecuación del alcance máximo en términos de la relación señalruido mı́nima detectable
4
Rmax
=
Pt G Ae σ
2
(4π) kB T0 BFn (S/N )min
(2.13)
por conveniencia se ha dejado el exponente a la cuarta y hemos eliminado los subı́ndices
de S y N . Cuando tomamos G por G(θ, φ) suponemos que consideramos la dirección de
máxima ganancia. Lo que hemos conseguido con (2.13) con respecto a (2.2) es que en
vez de Smin tenemos como parámetro S/N )min que contiene la imprescindible información
sobre el ruido. Un comentario sobre B es el siguiente: el detector de la portadora deja
pasar la modulación y rechaza la portadora. Las condiciones de que la anchura de banda
de la señal video sea la mitad de la anchura de banda IF (que es redundante en un factor
2 por ser la señal una señal real) y que el centro frecuencial fIF es mucho mayor que el
ancho de banda en IF. El ancho de banda B del receptor es el ancho de banda en IF.
La figura de ruido del sistema se puede poner en función de las figuras de ruido de los
componentes y de sus ganancias
Fsistema = F1 +
F4 − 1
F 2 − 1 F3 − 1
+
+
+ ...
G1
G1 G2
G1 G2 G3
(2.14)
donde Fn es el n-ésimo elemento de la cadena y Gn es su ganancia. Es evidente que el
elemento que marca más la figura de ruido es el que se coloca en primer lugar. La G de
un atenuador se pueden poner como 1/L, siendo L la atenuación. Si un atenuador está
colocado en la posición tercera de nuestra fórmula su contribución será de (F3 −1)/(G1 G2 )
30
La ecuación radar
y la del elemento subsiguiente (F4 − 1)L/(G1 G2 G3 ), de modo que su efecto se manifiesta
realmente en la figura de ruido de este elemento que lo sigue. La L hace que el numerador
aumente, pero se espera que las ganancias G1 y G2 compensen el efecto de L, por lo que
F1 sigue dominando.
Problema: Supongamos que tenemos una antena donde el campo incidente
que llega es de 19 µV/m, que tiene una directividad de 20 dBi, una eficacia
de 0.9 y cuya temperatura de ruido es de 200 K. La frecuencia de la señal que
llega tiene una portadora de 2 GHz y un ancho de banda de 10 MHz. Esta
antena está seguida de un preamplificador que tiene una ganancia de 20 dB
y una figura de ruido de 6 dB. La temperatura del sistema es de 17 grados
centı́grados. Después del preamplificador hay una lı́nea de transmisión con
unas pérdidas de 3 dB que une dicho preamplificador con un amplificador de
23 dB y una figura de ruido de 10 dB. Calcúlese la relación señal-ruido de la
cadena
Queda ahora vincular este parámetro a cierta distribución estadı́stica que permita hacer
uso explı́cito del carácter estocástico del ruido.
2.2
Probabilidades de detección y de falsa alarma
Vamos a ver qué valor de S/N )min es necesario para alcanzar un nivel dado de probabilidad
en la detección de un blanco o complementariamente de probabilidad de una falsa alarma.
Suponemos que el ruido en el receptor a la entrada del filtro IF está definido por una
distribución de probabilidad gaussiana de media cero
p(v) = √
1
v2 exp −
2Ψ0
2πΨ0
(2.15)
donde p(v) dv es la probabilidad de encontrar un voltaje de ruido de entre valor v y valor
v + dv y Ψ0 es la potencia media de ruido. Se puede demostrar que si (2.15) describe
el ruido que entra en un filtro IF, la distribución de probabilidad para la envolvente del
ruido a la salida será
R
R2 p(R) =
exp −
(2.16)
Ψ0
2Ψ0
donde R es el valor de voltaje medido como envolvente. A partir de (2.16) podemos
calcular la probabilidad de que un valor del voltaje de ruido sea mayor que un cierto valor
VT
Z ∞
V2 Probabilidad(VT < R < ∞) =
(2.17)
p(R)dR = exp − T
2Ψ0
VT
El porcentaje de tiempo promedio que produce una señal que se puede interpretar como
falsa alarma Tfa es la probabilidad de que se presente este voltaje por la longitud del tiempo
José Luis Álvarez Pérez
31
de recepción τ0 de la señal que se pretende identificar. Ya que esta longitud atribuible a
un pulso en el dominio tiempo es 1/B con B el ancho de banda del receptor, podemos
poner
V2 τ0
1
1
T
=
= exp
Probabilidad(VT < R < ∞)
B Probabilidad(VT < R < ∞)
B
2Ψ0
(2.18)
Ya que τ0 es normalmente muy pequeña, hay muchas oportunidades durante un segundo
para que ocurra una falsa alarma. Por ejemplo, si la probabilidad es de 10−6 y τ0 = 1 µs,
ocurrirá una falsa alarma por segundo.
La presencia de una función exponencial en (2.18) hace que la dependencia en la ocurrencia de una falsa alarma con respecto al umbral VT sea muy grande. Un ejemplo es
que, si B = 1 M Hz un valor de 10 log[VT2 /(2 Ψ0 )] = 13.2 dB significa que se producirá
una falsa alarma cada 20 minutos. Si rebajamos el umbral de detección en 0.5 dB para la
cantidad 10 log[VT2 /(2 Ψ0 )], que nos da el umbral sobre el ruido de fondo en decibelios, de
modo que tenemos 12.7dB, tendremos que Tfa =2 minutos.
Tfa =
Problema: Hágase el cálculo del párrafo anterior en detalle. Dibújese un
gráfico, ya sea por ordenador o con papel milimetrado de la dependencia entre
VT2 /(2 Ψ0 ) en dBs y el tiempo entre falsas alarmas.
En la práctica, es más probable que ocurra una falsa alarma debida a los llamados ecos
de clutter (retornos del suelo, del mar, de fenómenos atmosféricos o hasta de pájaros o
insectos) que son suficientemente intensos como para superar el umbral de detección. En
las especificaciones del sistema radar, sin embargo, lo que se indica es la probabilidad de
falsa alarma debida al ruido del receptor.
Aunque llamamos falsa alarma a un valor del voltaje en el receptor superior a uno
dado y definido como umbral, no significa que por una sola ocurrencia del mismo se
produzca un informe de falso blanco. La declaración de un blanco necesita más de un
episodio de detección, y se basa en múltiples observaciones del radar. En muchos casos,
establecer la trayectoria del blanco es una condición necesaria para que ese blanco se
declare como detectado. Por ello, se puede rebajar el umbral de detección lo que provocará
una probabilidad mayor de falsa alarma, pero no la de un informe de falso blanco.
Si el receptor esta apagado durante un pequeño espacio de tiempo (lo que a veces se
denomina “gating”), como suele ocurrir durante la transmisión de un pulso, la probabilidad
de una falsa alarma crecerı́a si el tiempo entre falsas alarmas permaneciera constante.
En cuanto a la probabilidad de detección, supongamos que tenemos una señal de
amplitud A de carácter sinusoidal a la entrada del detector de la portadora, en presencia
de un ruido gaussiano, entonces la densidad de probabilidad de obtener un valor R3 a la
3
Estamos haciendo la hipótesis de que la portadora solamente está modulada por el ruido, es decir,
que no tenemos modulación en amplitud o frecuencia de la señal entrante. Si existiesen este tipo de
modulaciones serı́a porque el proceso de detección es diferente a la simple identificación de un umbral y
32
La ecuación radar
salida del mismo es
ps (R) =
R2 + A2 RA R
exp −
I0
Ψ0
2Ψ0
Ψ0
(2.19)
donde I0 (Z) es la función de Bessel modificada de orden cero y argumento Z. Para valores
altos de Z, la forma asintótica de I0 (Z) es
exp(Z) 1
I0 (Z) = √
1+
+ ...
8Z
2πZ
(2.20)
La ecuación (2.19) se llama distribución de probabilidad de Rice.
Como antes, la probabilidad de encontrar un valor de R superior a un cierto umbral
VT es
Z
∞
ps (R) dR
Pd =
(2.21)
VT
A diferencia de(2.17), (2.21) no tiene solución analı́tica. Todas estas expresiones aparecen en la teorı́a de Rice en función de A2 /(2Ψ0 ), en lugar de la más conveniente S/N .
Ambas están relacionadas por
√
A
Amplitud de la señal
2 Rms del voltaje de la señal
=
=
1/2
Rms del voltaje de ruido
Rms del voltaje de ruido
Ψ0
Potencia de la señal 1/2 2S 1/2
= 2
=
(2.22)
Potencia del ruido
N
Atendiendo a las fórmulas de Rice que no damos aquı́ y que permiten calcular (2.21) e
introducienso (2.22), se puede ver que para conseguir una probabilidad de detección del
99% necesitamos una SNR (signal-to-noise ratio) de 15.75 dB. Por comaparación, una
señal de televisión analógica necesita una SNR de 40 dB para una buena recepción; si la
SNR es de 35 dB se verá algo de niebla, bastante si es de 30 dB y la imagen está totalmente
cubierta de niebla para un valor de 25 dB. Otro ejemplo es el de una red telefónica, que
necesita una SNR de 50 dB. Por tanto, un radar es un sistema que necesita una SNR
relativamente baja por comparación.
2.3
Integración de pulsos
Recibe el nombre de integración de pulsos el proceso por el cual, siendo la forma de onda
pulsada, varios pulsos son sumados para mejorar la relación señal-ruido. Si este proceso se
realiza antes de que la señal pase por el segundo detector la suma será coherente siempre
y cuando el sistema lo permita y las fases de los pulsos transmitidos se conozcan y se
puedan compensar. Si la integración se produce en banda base, después del segundo
detector, entonces la integración será incoherente. La integración coherente no introduce
teóricamente ninguna pérdida por sı́ misma, mientras que la incoherente sı́ lo hace.
habrı́a que modificar el an’alisis matématico que sigue. El análisis que sigue es válido, no obstante, para el
caso de una señal cuya única modulación es la de la formación de pulsos cuadrados, que es nuestra forma
de onda que estudiamos aquı́ por defecto si no se dice lo contrario.
José Luis Álvarez Pérez
33
En principio, la suma coherente implica que el voltaje se suma sobre la lı́nea del
receptor mientras que el ruido se suma como potencia, lo que implica que, en potencia,
mientras que la S crece como n2 , el ruido N lo hace como n, siendo n el número de pulsos
integrados. Por tanto la SNR aumenta linealmente con el número de impulsos integrados.
Antiguamente se creı́a que la mejora en la SNR en el caso de integración en la fase de
√
postdetección era del orden de n 4 , pero esto no es cierto debido al carácter no lineal del
segundo detector, que convierte parte de la energı́a en energı́a de ruido durante el proceso
de rectificación. En general, se define la eficiencia de integración de postdetección como
Ei (n) =
(S/N )1
n(S/N )n
(2.23)
donde (S/N )1 es la relación señal-ruido de un pulso individual sin integración, y (S/N )n
es el nivel necesario que ha de tener cada pulso si los integramos en grupos de n. El factor
de mejora de la integración se define como
Ii (n) = n Ei (n) =
(S/N )1
(S/N )n
(2.24)
De acuerdo a esta modificamos la ecuación (2.13) que queda como
4
Rmax
=
2.4
Pt G Ae σ n Ei (n)
Pt G Ae σ
=
(4π)2 kB T0 BFn (S/N )n
(4π)2 kB T0 BFn (S/N )1
(2.25)
Sección recta radar de un blanco
La sección recta radar es la propiedad de un blanco dispersor que representa la magnitud
de la señal eco devuelta al radar por el blanco. La sección recta radar σ se dice que es
un área ficticia que, interceptando una parte de la potencia incidente, repartirı́a su eco
igual en todas direcciones. Es una idealización que no se corresponde con ningún caso
real pero sı́ es un concepto matemático válido. La potencia dispersada por un blanco en
una cierta dirección y por tanto su sección recta radar en esa dirección se puede calcular
conociendo exactamente su geometrı́a y sus caracterı́sticas dieléctricas. También se puede
medir empŕicamente en una cámara anecoica, es decir, en una sala donde no se produce
ningún eco que actúe como fuente secundaria de señales reflejadas.
Se definen tradicionalmente tres regı́menes de dispersión electromagnética. Si la longitud de onda es grande comparada con las dimensiones del blanco nos encontramos en
la llamada región de Rayleigh (proúnciese “reilei”). Un ejemplo de esta situación en las
frecuencias hasta banda C es el caso del retorno dado por la lluvia. En el otro extremo
tenemos la llamada región óptica, donde la longitud de onda es muy pequeña comparada
con las dimensiones del blanco. En estas condiciones, la sección recta radar depende sobre
todo de la forma general del objeto, más que de el ángulo según lo observemos. Entre
ambos regı́menes, está la llamada región de resonancia, donde las dimensiones del objeto
4
Esto se deberı́a a considerar la N como una variable estadı́stica estimada n veces y promediada, de
√
modo que la desviación estándar de la misma decrecerı́a como n
34
La ecuación radar
son parecidas al orden de la longitud de onda. Para muchos blancos, la sección recta radar
en regimen resonante es mayor que en cualquiera de los otros dos.
Una esfera, un cilindro o una superficie plana son ejemplos de blancos sencillos. Para
ellos existen expresiones analı́ticas que describen el comportamiento dispersivo completamente y por consiguiente la σ. A veces la sección recta radar de un blanco complejo se
puede calcular a partir de las contribuciones individuales de formas simples.
En cuanto a la sección recta radar de los blancos complejos, tales como aviones, barcos,
vehı́culos terrestres, misiles, edificios, superficies de terreno, pueden variar bastante su
respuesta en términos de σ dependiendo de la frecuencia, el punto de observación . Esta
variabilidad se debe a las diferentes interferencias que haga cada parte del blanco con
las otras. Las fluctuaciones en el valor medido de la σ debidas al cambio de dirección de
observación a veces se denominan fading 5 . Las variaciones debidas al cambio de frecuencia
se suelen llamar efectos de decorrelación en frecuencia 6 . Estas variaciones hacen que si
estamos integrando varios pulsos a la hora de evaluar σ debemos tenerlas en cuenta como
equivalentes a la presencia de cierto ruido, o dicho de otra manera, como una disminución
de nuestra SNR según un cierto factor de pérdidas Lf (fluctuation loss). La ecuación
resultante para el alcance máximo es
4
Rmax
=
Pt G Ae σ n Ei (n)
2
(4π) kB T0 BFn (S/N )1 (Lf )1/ne
(2.26)
donde ne es el número de pulsos no correlados dentro de los n que son integrados. Se
supone en esta fórmula, por tanto, que los pulsos que no están correlados cancelan su
contribución de fading. Los términos de la fórmula (2.26) puede ponerse también en otro
orden en el caso de que lo que se quiera saber sea la relación señal ruido del eco recibido
(S/N )1 =
2.5
Pt G Ae σ n Ei (n)
2
(4πRmax )2 kB T0 BFn (Lf )1/ne
(2.27)
Pérdidas del sistema
Hasta ahora no hemos tenido en cuenta las pérdidas del sistema debidas al efecto de
disipación ohmica en las lńeas de transmisión o a la degradación en el rendimiento del
sistema. La primera de las reseñadas se puede estimar pero la segunda es de carácter
5
Esta palabra inglesa tiene un significado que solamente en otro contexto parece tener sentido aquı́.
Esto se debe a que el fenómeno que motiva la variación de la σ se puede estudiar a diferentes niveles, ya
sea más fı́sico, más matemático o más ingenieril, y muchas veces los términos se mezclan sin que sea obvia
su relación con el fenómeno.
6
La decorrelación de la señal del eco se puede deber t’ipicamente a lo que se denomina diversidad
frecuencial o a la agilidad frecuencial. La diversidad frecuencial es la situación que se presenta cuando se
utilizan dos o más transmisores con diferentes frecuencias cada uno, y la agilidad es debida al uso de dos
o más frecuencias en la forma de señal empleada, por ejemplo, si dos pulsos contiguos tienen tonos más o
menos puros pero distintos. En este último caso se utiliza un solo transmisor pero de banda ancha. En
ambos casos, se usan diferentes frecuencias para compensar, por ejemplo, que el eco puede ser muy débil
en una de las dos frecuencias a ciertos ángulos de posicionamiento relativo, de manera que al integrar estos
pulsos de diferentes frecuencias se compensa el uno con el otro.
José Luis Álvarez Pérez
35
más imprevisible, aunque sea posible definir un margen de valores basados en una serie
de tests. El objetivo, por supuesto, es reducir estas pérdidas lo más posible durante el
diseño y construcción del sistema. Aún ası́, es imposible reducir del todo el valor de las
pérdidas. Este suele oscilar entre 10 y 20 dB (Unas pérdidas de 12 dB reducen el alcance
a la mitad). La falta de un mantenimiento adecuado del radar degradará su rendimiento
y aumentará las pérdidas.
Las pérdidas del sitema se integrarán como un factor Ls en el denominador de la
ecuación radar, ya sea para la Rmax o para la SNR. A veces se habla de eficiencia, que es
la inversa de la Ls .
2.5.1
Pérdidas en la lı́neas de transmisión y en los dispositivos
Siempre existen pérdidas en las lı́neas de transmisión del sistema, que no son ideales.
Además hay pérdidas en los diversos dispositivos de microondas, tales como el duplexador,
el protector del receptor, los limitadores, los acopladores direccionales, etc.
2.5.2
Pérdidas en la antena
Las pérdidas ohmicas de la antena no se incluyen en el término Ls de pérdidas del sistema
sino que está absorbido en el valor de la ganancia G, que es el producto de la directividad
D por la eficiencia de la antena ηa . Sin embargo, existen otros efectos que podemos llamar
pérdidas de la antena que podemos incorporar en la Ls :
• Pérdidas por la forma del haz. Se deben a que si el haz está rotando, por ejemplo,
como en el caso de un radar de control aéreo en una aeropuerto, el tiempo entre los
pulsos que posteriormente serán integrados significa que el haz se ha movido y el
valor correpondiente de la ganancia G(θantena-blanco , φantena-blanco ) ha variado.
Por tanto, esa disminución en la potencia transmitida ha de ser tenida en cuenta.
Este efecto también se manifiesta, no por la integración de pulsos, sino por el uso de
una zona finita del haz principal, como suele ser la definida por los 3 dB de caı́da, a
la hora de integrar una celda de resolución.
• Pérdidas durante el escaneo. En el ejemplo anterior, de una antena giratoria, el valor
de G(θantena-blanco , φantena-blanco ) tampoco será el mismo en el instante de transmisión
y en el de recepción.
• Radomos. Muchas veces el radar está cubierto por una especie de cúpula cerrada
que llamamos radomo, que lo protege de las inclemencias meteorológicas 7 , y que es
electromagnéticamente transparente. Pese a esta transparencia, sı́ que se producen
unas pérdidas del orden 1 dB para frecuencias de la banda X a la banda L.
7
En una antena giratoria, em motor necesitará menos potencia si no tiene que vencer la fuerza del
viento, que además podrı́a alterar la constancia de la velocidad angular
36
2.5.3
La ecuación radar
Pérdidas en el procesado de señal
Los radares modernos se caracterizan por tener un procesado bastante complejo de la señal
que permite la reducción de lo que hemos llamado clutter o parte de la señal no deseada
ası́ como la extracción de la mayor información posible de la parte útil de la señal. Sin
embargo, el procesado de señal puede introducir un cierto nivel de pérdidas, que oscila
entre 0.5 y 2 dB.
2.5.4
Degradación del equipo
No es inusual que los radares operados en condiciones de campo tengan un rendimiento
inferior al de fábrica. La pérdida de rendimiento se puede detectar y corregir testeando
periódicamente el radar, normalmente con dispositivos integrados en el propio radar. Unas
pérdidas tı́picas por este concepto van de 1 a 3 dB, pero las pérdidas por degradación del
equipo son muy variables.
2.5.5
Efectos de propagación
La propagación de las ondas de radar se produce realmente, no en el espacio libre, sino en
presencia de una Tierra por debajo y la ionosfera por arriba. A frecuencias suficientemente
altas, de la banda L para arriba, estos dos elementos no son fundamentales. En cuanto al
medio entre ambos elementos, tampoco es el vacı́o, sino una troposfera donde el ı́ndice de
refracción es variable y donde ocurren fenómenos meteorológicos.
Estos efectos se tienen en cuenta introoduciendo el factor de propagación F 4 , que por
razones fı́sicas aparece reflejado a traves de su cuarta potencia, o, si se prefiere, se define
como F 4 y no como F . En cuanto a la influencia de la troposfera, su influencia viene dada
por exp (−2αR).
La fórmula de la ecuación radar, depués de introducir todos los efectos mencionados,
queda como
Pt G Ae σ n Ei (n) F 4 exp (−2αRmax )
4
Rmax
=
(2.28)
(4π)2 kB T0 BFn (S/N )1 (Lf )1/ne Ls
o
Pt G Ae σ n Ei (n) F 4 exp (−2αRmax )
(S/N )1 =
(2.29)
2 )2 k T BF (L )1/ne L
(4πRmax
n
s
B 0
f
Esta ecuación de onda, desarrollada para una forma de onda pulsada y basada en la
detección de la intensidad del eco devuelto por una superficie caracterizada por un valor
de sección recta radar comparada con la transmitida, ha de ser modificada si tenemos que
tratar con radares de onda continua, radares Doppler, radares meteorológicos -cuyo blanco
no es una superficie sino un volumen-, radares de apertura sintética, etc.
Chapter 3
Detección de señales en ruido.
Filtro adaptado
3.1
Filtro adaptado sobre ruido blanco
En general, la maximización del cociente entre la potencia de pico y el ruido en un receptor
radar maximiza la detectabilidad de un blanco. Una red lineal que realiza esta funcin se
denomina filtro adaptado y constituye la base de prácticamente cualquier receptor de
radar.
Vamos a calcular cuál ha de ser la forma de la respuesta frecuencial del filtro adaptado.
El cociente que pretendemos maximizar es la relación de la potencia de señal pico máxima
en la salida del receptor|s(t)|2max y la potencia de ruido promedio N 1 dada por
Rf =
|s(t)|2max
N
(3.1)
La magnitud del voltaje de salida de un filtro cuya función de respuesta frecuencial es
H(f ) será
Z ∞
|s(t)|max = S(f )H(f ) exp (j 2πf t) df (3.2)
−∞
donde S(f ) es la transformada de Fourier de la señal recibida como input por el filtro.
Por otro lado, el ruido medio de output será
Z
N0 ∞
|H(f )|2 df
(3.3)
N=
2 −∞
donde N0 es la potencia de ruido de input por unidad de ancho de banda. La presencia
del factor 1/2 se debe a que los lı́mites de la integral son −∞ e ∞, pero N0 está definido
1
La definición de SNR no es esta, ya que estamos utilizando la potencia de pico en la definición mientras
que la potencia de señal incluı́da normalmente en la SNR es la potencia promedio. Si la señal es un sino,
la diferencia es simplemente que la potencia de pico es el doble de la promedio, pero para señales más
complejas, también lo es la relación entre Rf y la SNR.
37
38
Detección de señales en ruido. Filtro adaptado
como la potencia de ruido por unidad de ancho de banda solamente para valores positivos
de frecuencia.
Sustituyendo (3.2) y (3.3) en (3.1), obtenemos
R∞
| −∞ S(f )H(f ) exp (j 2πf tm ) df |2
R∞
Rf =
(3.4)
N0
2
2
−∞ |H(f )| df
donde tm es el instante en el cual la señal toma el valor de pico. Ahora hacemos uso
de la desigualdad de Schwartz, por la cual tenemos que para dos funciones complejas
cualesquiera P (x) and Q(x) se verifica
b
Z
Z
?
dx P (x) P (x)
a
a
b
Z b
dy Q(y) Q(y) ≥ dx P (x)? Q(x)
?
(3.5)
a
donde la igualdad es cierta solamente si P (x) y Q(x) son iguales salvo una consante, es
decir, si P (x) = kQ(x). Si ahora definimos P como
P ? (f ) = S(f ) exp (j 2πf tm )
(3.6)
Q(f ) = H(f )
(3.7)
y Q como
tenemos que, por la desigualdad de Schwartz (3.5),
R
R∞
R∞
2 ∞ df 0 |S(f 0 )|2
2
−∞
−∞ df |H(f )|
−∞ df |S(f )|
R∞
Rf ≤
=
N0
N0
2
2
2
−∞ |H(f )| df
(3.8)
Por otro lado, el teorema de Parseval, que relaciona la energı́a en el dominio de frecuencias y la energı́a en el dominio de tiempo, establece que
Z ∞
Z ∞
df |S(f )|2 =
dt |s(t)|2 = Energı́a de la señal = E
(3.9)
−∞
−∞
De aquı́ podemos poner que
Rf ≤
2E
N0
(3.10)
La relación entre la potencia de pico de la señal de salida y la potencia del ruido por unidad
de ancho de banda solamente depende de la energı́a de la señal recibida y del citado nivel
de ruido por hercio. No depende explı́citamente de la forma de la señal, su duración o el
ancho de banda, que serán por tanto caracterı́sticas de la señal que se pueden seleccionar
para otros fines.
Para que se cumpla la igualdad en (3.4), se ha de verificar, según lo que decı́amos
antes, que P = k Q, es decir, que
H(f ) = Ga S ? (f ) exp (−j 2πf tm )
(3.11)
José Luis Álvarez Pérez
39
donde la constante k = 1/Ga . Si ahora ponemos que H(f ) = |H(f )| exp(−j φh (f )) y
S(f ) = |S(f )| exp(−j φs (f )), tenemos que (3.11) implica la siguientes relaciones
|H(f )| = Ga |S(f )|
φh (f ) = −φs (f )) + 2πf tm
(3.12)
Aquı́ vemos que, salvo el factor Ga , la magnitud de la función de respuesta en frecuencia
del filtro adaptado es la misma que el espectro de amplitudes de la señal de entrada, y
que la fase es la opuesta a la del espectro de la señal más un cierto desfase proporcional
a la frecuencia. El efecto de la fase igual y de signo negativo a la de la señal es la de
cancelar los componentes de fase de esta última y ası́ conseguir que se sumen de manera
completamente constructiva y que la intensidad de señal sea máxima a la salida del filtro.
Veamos ahora cuál es la respuesta impulsional del filtro, que es la transformada de
Fourier inversa de la respuesta en frecuencia que acabamos de calcular
Z ∞
Z ∞
h(t) =
H(f ) exp(j 2πf t) = Ga
S ? (f ) exp[−j 2πf (tm − t)]
(3.13)
−∞
−∞
Haciendo uso de las siguientes propiedades de las transformadas de Fourier
f (−t) *
) F (f )?
* F (f ) exp (−j 2πf t0 )
f (t − t0 ) )
podemos poner (3.13) como
Z
∞
S(f ) exp[j 2πf (tm − t)] = Ga s(tm − t)
h(t) = Ga
(3.14)
−∞
De esta expressión comprobamos cómo las respuestas impulsionales han de ser iguales
pero invertidas (ver figura 3.1) y h(t), para ser un filtro causal, no ha de tener ninguna
respuesta antes de que la señal se reciba, es decir, que se ha de verificar que
h(t) = Ga s(tm − t) ⇒ tm − t > 0
ya que el origen de tiempos se ha tomado en el origen de la señal. Como queda reflejado
en la figura 3.1, el valor de tm es el de la duración del pulso.
El filtro adaptado se implementa en el tramo de IF del receptor superheterodino ya
que la anchura de banda del mismo es la anchura de banda en IF.
Desde el punto de vista matemático, lo que representa la ecuación (3.2) es la correlación
entre la señal de input y el filtro. Esto permite diseñar otro receptor alternativo al del
que se basa en un filtro del tipo que acabamos de describir. Este se basa en correlar el
eco recibido con una réplica de la señal transmitida. El valor máximo de dicha correlación
se produce cuando el retardo aplicado a la generación de la réplica, TR , coincide con el
tiempo de ida y vuelta que necesita el pulso para hacer su viaje de ida y vuelta al blanco.
Todo este análisis es válido bajo la hipótesis de que conocemos la forma de la señal
entrante. Esto es ası́ si la forma de la misma es simplemente la de la señal transmitida
(salvo un factor de pérdida de intensidad).
40
Detección de señales en ruido. Filtro adaptado
Figure 3.1: Ejemplo de a) forma de onda recibida, b) respuesta impulsional del filtro
adaptado correspondiente.
Figure 3.2: a) Pulso rectangular de duración τ y portadora f0 ; b) respuesta impulsional
del filtro adaptado; c) señal a la salida del filtro adaptado; d) envolvente de la señal de
salida del filtro adaptado.
En los primeros tiempos del radar, no se conocı́an los fundamentos del filtro adaptado y
simplemente se utilizó el principio comprobado empı́ricamente de que el ancho de banda del
filtro debı́a ser equivalente al de la señal de entrada. Para el caso de un pulso rectangular
se observó que la relación entre la anchura de banda del filtro B y la duración del pulso τ
era de Bτ ' 1 2 . Esta relación se sigue usando como regla de referencia, pero no es válida
para pulsos que no sean rectangulares modulados en amplitud.
Por otro lado, un filtro adaptado es una solución matemática que no se puede implementar de manera perfecta. La pérdida en la SNR por la falta de comportamiento ideal
se puede acotar aproximadamente como inferior a 0.5 dB.
3.2
Filtro adaptado para ruido que no sea blanco
En la derivación que hemos hecho se ha supuesto que el espectro del ruido que acompaña
la señal es constante, es decir, que es ruido incorrelado o blanco. Si esta hipótesis no se
verifica y el ruido depende de f , la función que maximiza Rf en (3.1) se puede ver que es
H(f ) =
Ga S ? (f ) exp (−j 2πf tm )
|Ni (f )|2
(3.15)
2
El valor exacto desde el punto de vista matemático es de 1.37, y produce unas pérdidas con respecto
al filtro adaptado ideal de 0.88 dB en la SNR.
José Luis Álvarez Pérez
41
donde Ni (f ) es el espectro del ruido de entrada. Esta ecuación se puede reescribir como
H(f ) =
S(f ) 1
Ga
exp (−j 2πf tm )
Ni (f )
Ni (f )
(3.16)
que se interpreta como una cascada de dos filtros: el primero, 1/Ni (f ), que lo que hace
es “blanquear” el ruido, y uno segundo que actúa como un filtro adaptado sobre la señal
S(f )/Ni (f ).
Es muy poco comuún que el ruido haya de ser tratado como no blanco en las aplicaciones radar.
3.3
Sumario de caracterı́sticas del filtro adaptado
Resumiendo lo que hemos visto:
1. El concepto de filtro adaptado hace que la detección en radar sea bastante diferente
al concepto de detección en comunicaciones. El objetivo no es que la señal de salida
conserve la forma del la de entrada, que varı́a sustancialmente (ver figura 3.2), sino
maximizar su detectabilidad.
2. La capacidad de detectabilidad a la salida del filtro adaptado depende únicamente
de la energı́a de la señal recibida y de la densidad espectral del ruido N0 .
3. La forma de la señal transmitida y su ancho de banda, que no influyen en la citada
detectabilidad, se puede optimizar para conseguir otros objetivos como la extracción
de información del blanco.
42
Detección de señales en ruido. Filtro adaptado
Chapter 4
Radares MTI y Doppler
4.1
Introducción
Un radar de pulsos que emplea el desplazamiento Doppler para detectar blancos en
movimiento puede ser un radar MTI (Moving Target Indicator) o un radar Doppler pulsado. También existen radares de onda continua, como enseguida se verá, que hacen uso
del desplazamiento Doppler. Un radar MTI tiene una PRF suficientemente baja para que
no se presenten ambigüedades en alcance según se veı́a en la ecuación (1.2), pero que sin
embargo tendrá muchas ambigüedades en el dominio Doppler. Por contra, el radar pulsado Doppler presenta numerosas ambigüedades en alcance, dada su alta PRF, pero evita,
con este valor precisamente tan alto de la PRF, las ambigüedades en el dominio Doppler.
Existen también radares que tienen una PRF intermedia que no puede evitar ninguno de
los dos tipos de ambigüedades pero las presenta de una manera moderada en ambos casos.
Además de permitir la detección de blancos en movimiento en medio de ecos del llamado clutter, es decir, el retorno de la señal desde blancos no deseados, el fenómeno del
desplazamiento Doppler permite obtener otras datos de interés, como medir la velocidad de un blanco, obtener imágenes radar de alta resolución o permitir que los radares
meteorológicos obtengan información sobre el vector de la velocidad del viento.
4.2
Desplazamiento Doppler en frecuencia
El desplazamiento Doppler en frecuencia de un blanco obedece la siguiente ecuación
fd = −
2ft vr
c
(4.1)
donde fd es el desplazamiento Doppler que sufre la frecuencia ft , vr es la velocidad radial de
alejamiento del blanco respecto al radar y c es la velocidad de la luz. Este desplazamiento
en la frecuencia se debe al movimiento relativo entre el transmisor y el receptor, que hace
que la manera de ver la periodicidad de la señal varı́e.
Vamos a ver tres maneras diferentes de deducir la fórmula (4.1). La primera consiste
43
44
Radares MTI y Doppler
en ver cuál es la componente de fase debida camino de ida y vuelta de propagación
φ = −2π ×
2R
= −4πR/λ
λ
(4.2)
La derivada de esta componente de la fase es la componente adicional de la frecuencia
observada en la señal recibida si R varı́a con el tiempo 1
wd =
dφ
4π dR
4πvr
=−
=−
= 2πfd
dt
λ dt
λ
(4.3)
2ft vr
2vr
=−
λ
c
(4.4)
De esta ecuación se deriva que
fd = −
La segunda manera nos permite hacer el mismo cálculo viendo el problema desde otro
punto de vista. Ası́, ponemos que si la señal transmitida tiene la forma
st = At sin(2πft t)
(4.5)
la señal recibida se puede poner como
sr = Ar sin(2πft (t − TR ))
(4.6)
donde TR es el tiempo que tarda la señal en ser recibida desde que es transmitida, y donde
se está suponiendo que la señal no ve alterada su forma por la reflexión en el blanco 2 . Si
el blanco se mueve tenemos que
TR =
2(R0 + vr t)
2R
=
c
c
(4.7)
lo que implica que (4.6) se puede poner como
h
2vr 4πft R0 i
sr = Ar sin 2πft 1 −
t−
c
c
(4.8)
donde vemos que el desplazamiento Doppler es de −2ft vr /c.
La tercera demostración que se ofrece aquı́ quiere incorporar, por completitud, la
corrección llamada relativista, que añade el efecto debido a que el tiempo no transcurre
de manera igual para el transmisor y para el receptor si el movimiento implicado en el
problema no es despreciable con respecto a la velocidad de la luz. La teorı́a de la relatividad
especial nos dice que un intervalo de tiempo ∆t0 medido sobre la señal transmitida en el
sistema de referencia del transmisor se observa desde un receptor cualquiera con respecto
1
Si esta componente de fase se debe a un R constante en el tiempo, esta componente no depende de t
y se trata de una fase absoluta que no altera la frecuencia.
2
Esta hipótesis está implı́cita en la primera demostración ya que en la misma se analiza la componente
de fase debida al desplazamiento de la señal en una distacia 2R y no se consideran efectos adicionales, por
ejemplo los de una alteración de la forma del pulso.
José Luis Álvarez Pérez
45
al cual el transmisor se mueve a una velocidad vr como un intervalo de tiempo distinto
∆t e igual a
∆t = γ∆t0
γ=
1
(1 − vr2 /c2 )1/2
Ası́, el perı́odo de la señal transmitida Tt y el de la señal recibida Tr estarán relacionados
mediante la igualdad
Tr = γ Tt + γ Tt vr /c
(4.9)
lo que implica
ft = fr
1 + vr /c
(1 − vr2 /c2 )1/2
(4.10)
Esta es la relación exacta para el desplazamiento Doppler. Si vr c, entonces podemos
poner 1/(1 + vr /c) ' 1 − vr /c si hacemos un desarrollo en Taylor a primer orden y
(1 − vr2 /c2 ) ' 1
ft
fr =
' ft (1 − vr /c)
(4.11)
1 + vr /c
Como en el caso del radar el camino del pulso es de ida y vuelta hay que añadir un
factor 2 en esta ecuación.
4.3
Radar Doppler de onda continua
A diferencia de un radar pulsado, en un radar continuo la recepción es simultánea con
la transmisión. El radar permite que la señal transmitida pase tambin directamente al
receptor y se mezcle con la del eco. Lo que se hace exactamente es mezclar la señal recibida
con la que viene del módulo transmisor de tal manera que el resultado sea que la parte
de la señal que proviene del blanco en movimiento quede situada en torno a la frecuencia
fd del desplazamiento Doppler y pueda ser filtrada una vez que se define una velocidad
máxima estimada a priori para el blanco y de acuerdo con ella un ancho de banda para el
filtro. Si el radar se diseña tal que la señal del transmisor pasa directamente al receptor
es adecuado utilizar un filtro logarı́tmico por ejemplo.
Este radar analógico de onda continua, tal y como se ha descrito, no distingue el signo
de la fd , es decir, no distingue el signo de la velocidad relativa del blanco. Este radar ası́
diseñado es bastante poco sofisticado pero nos sirve para ilustrar el principio de detección
Doppler.
4.4
4.4.1
Radar MTI
Principio de funcionamiento
Otra manera de reconocer la presencia de partes de la señal recibida debidas a blancos
en movimiento es considerar el problema en el dominio tiempo y comparar los retornos
46
Radares MTI y Doppler
Figure 4.1: Dos barridos sucesivos en una representación amplitud vs. tiempo de un radas
MTI. Cuando (b) se sustrae a (a) los ecos de blancos estacionarios se cancelan.
de dos barridos (=perı́odos de repetición del pulso=PRP=1/PRF) y utilizar el hecho de
que la fase de los blancos en movimiento varı́a de barrido a barrido (también variarı́a
la intensidad de la señal recibida en tiempos separados por un PRP, si utilizáramos una
pantalla de A scope).
La salida video 3 de un radar MTI es como la ilustrada en la figura 4.1 y se denomina
bipolar si no está rectificada de manera que puede ser positiva o negativa (si estuviese rectificada, la llamarı́amos unipolar). Realizando la sustracción de dos barridos consecutivos
se detecta la presencia de blancos en movimiento y el signo del mismo. Esta sustracción
se realizaba en los primeros radares MTI mediante lı́neas de retardo 4 y aunque modernamente el procesado es digital y la sustracción se realiza mediante el uso de un dispositivo
de memoria esta función se sigue denominando cancelación por lı́nea de retardo. Esta
operación de sustracción se realiza sobre las fases de la señal directamente, en lugar de
sobre las amplitudes, que también varı́an al hacerlo la fase, de manera que el detector de
amplitud que tı́picamente demodula la envolvente se sustituye por un detector de fase.
4.4.2
Diagrama de bloques
Un radar MTI funciona, como acabamos de decir, basado en la detección de la fase, y
por tanto depende en buena medida de la estabilidad del oscilador local del radar. Si
la fase del oscilador local variara entre pulsos de una manera notable, estas variaciones
podrı́an ser interpretadas, de acuerdo a lo expuesto en la sección anterior, como blancos
en movimiento.
3
Recurdese que la señal denominada de video en un radar es la señal a la salida del demodulador o
segundo detector, que en el caso de utilizar un detector de amplitud o demodulador de la envolvente es la
señal en banda base y en el caso de un radar MTI veremos que es la señal de salida de un detector de fase
4
A veces se llaman lı́neas de retardo acústicas, lo que recalca su carácter analógico aunque no tiene
nada que ver con las ondas de sonido.
José Luis Álvarez Pérez
47
Figure 4.2: (a) Representación de un tren de pulsos en el segmento RF O if del receptor;
(b) tren de pulsos en la señal de video si fd < 1/τ ; (c) tren de pulsos en la señal de video
si fd > 1/τ . En (c) se ha exagerado la anchura del pulso con respecto a la longitud del
periodo de repetición del pulso.
Figure 4.3: (a) Diagrama de bloques de un radar Doppler de onda continua sencillo que
muestra además la respuesta en frecuencia del filtro Doppler; (b) Diagrama de bloques de
una radar Doppler pulsado simple.
48
Radares MTI y Doppler
Para recalcar el carácter altamente estable del oscilador local, este se denomina stalo
en un radar MTI, por stable local oscillator. Sin embargo, no basta con que el oscilador sea
muy estable, sino que además es necesario que la fase de la frecuencia intermedia, a la que
realizamos la detección, tenga una fase coherente (=constante) con la de la señal recibida.
Por ello, existe un segundo oscilador que denominamos coho por coherent oscillator, cuya
señal se mezcla con la del stalo antes de ser amplificada y transmitida. De esta manera, el
mezclador en recepción combina la señal del eco con el stalo y la IF tendrá la frecuencia
del coho. El segmento IF se diseña como un filtro adaptado, según lo visto en el capı́tulo
anterior, y a esta frecuencia se realiza la detección de fase en vez de la detección en
amplitud ı́mplicita en la mayor parte de los razonamientos en capı́tulos anteriores. El
detector de fase más directo de idear es un simple mezclador con la señal del coho. Pero
existen otras alternativas analógicas como las mostradas en la figura 4.4. El caso a) es el
de un detector de diodos balanceados, donde la señal de salida viene dada por
Eout = K(cos θ − cos 2wt + términos de orden superior)
(4.12)
y donde θ es el desfase. El caso b) es el de un detector de fase coincidente, que tiene una
función carecterı́stica de salida triangular con el pico en la fase θ. Los detectores digitales
son obviamente otra solución posible. Dentro de el tipo digital, que lógicamente implica
la inserción de un conversor A/D, hay una multiplicidad de detectores que explotan el uso
de una señal en fase I y otra en cuadratura Q. El utilizar estas dos señales en nuestro
receptor era un elemento deseable que ya se conocı́a en la época de tecnologı́a únicamente
analógica pero con inconvenientes a la hora de la implementación. Los detectores digitales
tienen además la posibilidad de ser reprogramados fácilmente.
A la salida del detector de fase se sitúa o bien el cancelador de lı́nea de retardo que
hemos mencionado y que explicamos en detalle más abajo, o bien otros filtros que también
se describen más adelante.
En los primeros radares, aquellos basados en magnetrones, la fase del coho se enganchaba a la de cada pulso transmitido reajustándola posteriormente a la del siguiente y ası́
de manera sucesiva. Este método hacı́a el radar coherente “en recepción”.
4.4.3
Canceladores de lı́nea de retardo, velocidades ciegas, clutter
El cancelador simple de lı́nea de retardo que hemos descrito antes y que está representado
en la figura 4.5 es un tipo de filtro en dominio temporal. Es interesante calcular su
Figure 4.4: (a) Detector de diodo balanceado; (b) Detector de fase coincidente
José Luis Álvarez Pérez
49
Figure 4.5: Diagrama de bloques de un cancelador de lı́nea de retardo simple.
respuesta en frecuencia H(f ). Para ello comparamos las señales a la salida del detector
de fase de dos ecos consecutivos Vi y Vi+1 suponiendo que el detector es un mezclador con
la señal del coho
Vi+1 = k sin(2πfd t − φ0 )
Vi = k sin(2πfd (t − Tp ) − φ0 )
(4.13)
donde φ0 = 4πR0 /λ, Tp = 1/P RF y donde hemos puesto senos en vez de cosenos como
corresponde al resultado de la mezcla por conveniencia.
La acción del cancelador de lı́nea de retardo es la de sustraer ambas señales, lo que
resulta en
i
h
Tp − φ0
(4.14)
V = Vi+1 − Vi = 2k sin(πfd Tp ) cos 2πfd t −
2
donde se ha hecho uso de la igualdad sin A − sin B = 2 sin[(A − B)/2] cos[(A + B)/2]. Este
resultado del cancelador es una señal de la misma frecuencia que la de Vi y en la que la
amplitud ahora es 2k sin(πfd Tp ). Esto significa que la respuesta en frecuencia Doppler del
cancelador, visto como filtro, es
H(f ) = 2 sin(πf Tp )
(4.15)
cuya amplitud está representada en la figura 4.6. Vemos que este filtro elimina la componente de f = 0 como se pretendı́a, de manera que elimina el clutter estático. Sin embargo,
Figure 4.6: Magnitud de la respuesta en frecuencia del filtro temporal de una lı́nea de
retardo. La PRF es fp = 1/Tp .
50
Radares MTI y Doppler
también anula las frecuencias iguales a la PRF y sus armónicos ya que
sin(πfd Tp ) = 0
si fd =
n
Tp
es decir, si vr =
nλ P RF
2
donde hemos sustituido fd = 2vr /λ en la última igualdad. Aparte de ser un resultado
matemático es evidente que la frecuencia del desplazamiento Doppler (o cualquiera de
sus armónicos) no se detecta con un muestreo equivalente a su periodo, ya que la fase
será siempre la misma repetida. Estas velocidades múltiplos de λ P RF/2 se denominan
velocidades de escape a la detección o ciegas (blind speeds). Hay varias maneras de intentar
reducir o eliminar las velocidades ciegas:
• Operar el radar a frecuencias bajas (λs grandes). De esta manera las velocidades
ciegas pueden ser muy altas y no relevantes para nuestro problema de detección. Sin
embargo, esto puede implicar frecuencias de VHF, que corresponden a resoluciones
espaciales bajas y están sujetas a interferencias con las señales de radio y televición.
• Operar con una PRF alta, con el mismo efecto que el uso de longitudes de onda
largas. El problema asociado al uso de PRFs altas es la presencia de ambigëdades
en alcance.
• Uso de más de una PRF. De esta manera las velocidades que no se ven con una PRF
se ven con la otra. El problema es la mezcla de los ecos de una PRF con los de la otra,
o dicho de otra manera, la aparición de nuevas ambigedades en alcance. Una manera
común en control aéreo de implementer varias PRFs es la llamada escalonada pulso
a pulso (staggered PRF), en la que la PRF cambia durante n pulsos consecutivos,
repitiéndose posteriormente. Su análisis es complejo y no lo trataremos aquı́.
• Uso de más de una frecuencia RF. La dificultad en este caso puede ser que la separación entre las dos frecuencias que nos soluciona teóricamente el problema de las
blind speeds sea demasiado grande y se nos presenten dificultades en cuanto a la
anchura de banda del transmisor.
A veces se combinan estas soluciones y se obtiene una buena solución al problema mientras
que en otras ocasiones es más ventajoso tolerar la presencia de velocidades ciegas que
implementar estas soluciones.
Otro problema asociado al filtro temporal del cancelador de lı́nea de retardo es el de
que el clutter no tiene realmente una respuesta espectral en el receptor equivalente a una
delta de Dirac matemática. Esto se debe tanto a la presencia de elementos del clutter con
un componente de velocidad o la pérdida de coherencia temporal del mismo 5 como a la
respuesta impulsional del sistema, que puede tener cierta inestabilidad de fase originada en
el stalo y el coho y que además es finita en frecuencia lo que implica el ensanchamiento de
una teórica delta de Dirac. Otros factores también influyen poderosamente en la respuesta
impulsional del receptor dependiendo del tipo de radar. Por ejemplo, si la antena se mueve,
esta puede modular la señal en tiempo de acuerdo a su diagrama de radiación. De esta
5
El eco procedente del canopio de un bosque da una respuesta cuya fase no es constante, por ejemplo.
José Luis Álvarez Pérez
51
Figure 4.7: Respuestas en frecuencia de un cancelador de lı́nea de retardo simple (curva
continua) frente a un cancelador doble (curva discontinua) y al espectro del clutter (curva
sombreada). Debido a la naturaleza muestreada de la señal, el espectro del clutter aparece
de manera periódica cada PRF.
manera, todos estos efectos contribuyen a que el espectro del clutter se pueda poner como
gaussiano usando o abusando del teorema central del lı́mite
f 2 λ2 f2 W (f ) = W0 exp − 2 = W0 exp −
2σc
8σv2
f ≥0
(4.16)
donde W0 es el valor de pico de la densidad espectral de potencia del clutter o valor a
f = 0, σc es la desviación estándar del valor de la densidad de potencia del clutter en
hercios y σc es la desviación estándar en metros por segundo y se define a través de la
relación fd = 2vr /λ de manera que σc = 2σv /λ. La ventaja de usar σv es que muchas
veces es una cantidad independiente de la frecuencia.
El efecto de un espectro de una cierta anchura frecuencial para el clutter se muestra
en la figura 4.7. Cuanto mayor sea el valor de σc , mayor será la presencia de clutter en el
output.
Se define la atenuación del clutter como
R∞
W (f ) df
CA = R ∞ 0
(4.17)
2
0 W (f ) |H(f )| df
que, sustituyendo el valor de W (f ) en (4.16), queda como sigue
CA =
0.5
1 − exp(−π 2 Tp2 σc2 )
(4.18)
Esta relación se puede aproximar para valores pequeños del argumento de la exponencial
del denominador como
fp2
fp2 λ2
CA ' 2 2 =
(4.19)
4π σc
16π 2 σv2
donde fp =PRF.
La atenuación del clutter proporcionada por un cancelador de lı́nea de retardo simple
no es normalmente suficiente. En la figura 4.7 se ve cómo el uso de un filtro que sea el
cuadrado del simple, es decir,
H(f ) = 4 sin2 (πf Tp )
(4.20)
52
Radares MTI y Doppler
tiene una intersección con el clutter más reducida y por tanto producirá una CA inferior.
Este H(f ) se consigue colocando un segundo cancelador en cascada. De esta manera el
CA será igual a
fp4
fp4 λ4
CA '
=
(4.21)
48π 4 σc4
768π 4 σv4
Colocando n canceladores en cascada el efecto se intensifica exponencialmente
H(f ) = 2n sinn (πf Tp )
(4.22)
El uso de más de dos lı́neas de retardo en tecnologı́a analógica era raro y solamente la
llegada del procesado digital ha hecho fácil y rentable el uso de un número mayor de lı́neas.
El parámetro CA tiene la desventaja de no tener en cuenta la potencial supresión de
la señal. Ası́, se puede obtener una CA infinita apagando el receptor, con lo que el clutter
queda suprimido pero también la señal. Por ello, en lugar de la CA es conveniente definir
un factor de mejora del radar MTI que tenga en cuenta no solamente la atenuación del
clutter sino la ganancia de la señal. Ası́ definimos el factor If de mejora MTI como el
cociente entre la relación señal a clutter a la salida y a la entrada del filtro de clutter,
promediada uniformemente sobre todas las velocidades radiales del blanco de interés que
sean relevantes
D S E
D (señal/clutter) E
Cin
out out If =
×
=
= CA × Ganancia media de la señal
(señal/clutter)in fd
Cout
Sin fd
(4.23)
donde el signo de promedio y el subı́ndice fd significa que se promedia con respecto al
desplazamiento Doppler. Podemos poner que para n canceladores de lı́nea de retardo, la
ganancia media de la señal es
Z 1/Tp
D S E
(2n − 1)!
out sin2n (πf Tp ) df = 2
Ganancia media de la señal =
= 22n
Sin fd
n!(n − 1)!
0
(4.24)
Si definimos como filtro MTI óptimo aquel que maximiza la If , de (4.24) se ve que el filtro
con n canceladores es más óptimo que el filtro con n − 1 ya que (2n − 1)!/(n!(n − 1)!) es
una función creciente con n.
4.4.4
Filtros transversales, bancos de filtros Doppler
La misma respuesta frecuencial de un cancelador de lı́nea de retardo con n elementos en
cascada se puede conseguir con los llamados filtros transversales donde en lugar de sumar
dos ecos procedentes de dos pulsos consecutivos se combinan linealmente N = n+1 pulsos.
Se puede demostrar que estos coeficientes lineales siguen la ley binomial
wi = (−1)i−1
n!
(n − i + 1)!(i − 1)!
i = 1, 2, . . . , n + 1
(4.25)
Se pueden obtener otros filtros MTI con otra elección de coeficientes 6 . Sin embargo, si
definimos como filtro MTI óptimo aquel que maximiza la If , el filtro transversal de pesos
6
Por ejemplo, se puede diseñar el filtro eligiendo los coeficientes de Chebyshev, que reducen ciertas
frecuencias. El caso más sofisticado es aquel en el que se hace uso de la capacidad de diseñar filtros
José Luis Álvarez Pérez
53
binomiales y signo alternante es una buena aproximación a dicho filtro óptimo, con su
respuesta frecuencial proporcional a sinn (πf Tp ).
Otra configuración de utilidad es la de los bancos de filtros Doppler, en la que diversos
filtros se colocan de manera contigua ofreciendo las siguientes ventajas 7 :
• Es posible separar más de un blanco en movimiento, cada uno con una velocidad
distinta, de manera sucesiva. Esto permite identificar varios blancos o eliminar
clutter en movimiento.
• Se puede utilizar para identificar la velocidad radial del blanco. Estára sujeta a
una cierta ambigüedad dado el muestreo a la frecuencia de la PRF 8 , que podemos
resolver variando la PRF.
• Si se utilizan filtros transversales de banda estrecha como elementos de un banco de
filtros se puede conseguir una notable reducción del ruido
La desventaja en el uso de bancos de filtros es su mayor complejidad. Los bancos de
filtros suelen implicar el uso de coeficientes complejos, es decir, con desfases, en los filtros
transversales. De nuevo, es el uso del procesado digital el que ha impulsado los bancos de
filtros, que antes eran de escasa utilización en radares MTI.
4.4.5
Fases ciegas, procesado en I y Q
Un problema que no hemos mencionado aún es el de la existencia de fases ciegas. Este
problema se presenta porque la fase Doppler se detecta a través de una función de dicha
fase y no de la fase misma. Esta función de la fase en el detector puede estar sujeta a una
ambigüedad como las que presenta la función seno o coseno que aparecen en el mezclador
con el coho o en (4.12). De esta manera puede ocurrir que dos pulsos consecutivos non
presenten diferencia de fase aparente y haya que acudir a la comparación del siguiente
par. En el caso b) de la figura 4.8 se ve que habrı́a una pérdida de la mitad de la energı́a
en la detección ya que la sustracción del pulso a2 del a1 da cero y no produce señal (la
sustraciión del a3 del a2 sı́ produce una detección correcta, sin embargo). Por ello el uso de
dos canales, uno en fase y otro en cuadratura permiten usar detectores, como por ejemplo
[I 2 + Q2 ]2 o max{|I| + |Q|/2, |Q| + |I|/2 que permiten eliminar este problema.
El uso de dos canales, como se ve en la figura 4.9, también ha de incluir un análisis
detallado de los errores debidos a desviaciones de los 90 grados entre la I y la Q, desequilibrio de ganancia o desigualdades en general en términos de ruido de cuantización o
linealidad entre ambos canales.
basados no solamente en la selección de los ceros sino también de los polos de la H(f ). Esto se puede
conseguir con otra elección de coeficientes que sea recursiva, donde se emplee algún tipo de feedback.
7
El uso de bancos de filtros incorporados en el procesado de la señal junto con otras mejoras, como
el uso de un mapa de clutter en memoria que permite diferenciar el clutter estático del eco de un blanco
móvil que sigue una trayectoria perpendicular a la lı́nea de visión del radar, permiten el diseño de un tipo
de radar más avanzado que el MTI denominado Moving Target Detector (MTD).
8
Las velocidades que sean múltiplos enteros de una dada vr producen un desplazamiento que también es
un múltiplo entero del que corresponde a 2vr /λ. Si a esta frecuencia le sumamos n PRFs, la fd detectada
será la misma si fd τ 1 (véase figura 4.2)
54
Radares MTI y Doppler
Figure 4.8: (a) Presencia de las velocidades ciegas como consecuencia de las ambigüedades
Doppler; (b) Ejemplo de las fases ciegas: a1 y a2 son indistinguibles desde el punto de
vista de la amplitud y producen fases ambiguas si el detector no utiliza dos canales; (c)
Uso de dos canales, I y Q, para la determinación de la fase y por consiguiente para la
eliminación de las fases ciegas; (d) Otro ejemplo de fases ciegas en I; (e) Canal Q para las
fases ciegas de (d).
José Luis Álvarez Pérez
55
Figure 4.9: Diagrama de bloqques de un receptor MTI digital.
El uso de los dos canales I y Q ya dijimos que está básicamente vinculado al procesado
digital. Aquı́ hay que tener en cuenta, por tanto, el error de cuantización y la necesidad de
encontrar un equilibrio entre el número de bits del conversor A/D que me permite por un
lado tener un error de cuantización bajo y suficiente rango dinámico (=máximo valor de la
señal o la SNR -según el caso tomamos una u otra- que se puede alcanzar sin saturación)
y por otro lado que no haga que el clutter de la señal a la entrada del conversor A/D sea
menor que el error de cuantización. Los dos últimos puntos se contraponen: si tenemos
más bits, es decir, más niveles cuantizados para un mayor rango dinámico en el nivel de
señal, nos aumenta la presencia del clutter no filtrado y considerado por consiguiente como
ruido, con lo que la SNR (o SCR, signal-to-clutter ratio) disminuye en dBs, y perjudica el
rango dinámico en términos de SNR.
4.5
4.5.1
Radar Doppler Pulsado
Principio de funcionamiento
Ya que los pulsos transmitidos son discretos, y necesitamos tener una referencia CW
interna para poder evaluar el desplazamiento Doppler, el que pulsa la señal será el amplificador y no el generador de señal. Si ahora mezclamos el eco con la señal de referencia
tendremos una situación muy semejante en el principio aunque no en la precisión a la
del radar de onda continua descrito en la sección 4.3 si el producto del desplazamiento
Doppler en frecuencia y la duración del pulso es superior a 1 (fd τ > 1), como se ilustra
en la figura 4.2. Sin embargo, lo habitual es que el pulso sea muy corto (τ < 1/fd ) y haya
que estimar fd a través de el procesado de varios pulsos, como de nuevo se ilustra en la
figura 4.2.
Evidentemente, se necesita una PRF suficientemente alta para poder estimar correctamente la fd . Por otro lado, como ya hemos anticipado más arriba, con una PRF alta se
pueden introducir ecos ambiguos procedentes de pulsos anteriores. Precisamente el radar
MTI tiene su PRF escogida de modo que no se presentan estas ambigüedades en alcance.
Sin embargo, presentan ambigüedades Doppler, ya que una PRF baja significa que dos
velocidades vr1 y vr2 tales que vr1 − vr2 = nλ PRF/2, n = 1, 2, 3, . . . no son distinguibles.
Este problema, con vr2 = 0 es el que motiva la presencia de velocidades ciegas, y es
normalmente un problema únicamente con n = 1 ya que ns más altas pueden implicar
velocidades muy grandes que no son relevantes. A frecuencias muy altas, necesarias para
56
Radares MTI y Doppler
Figure 4.10: (a) Espectro transmitido para una forma de onda de pulsos rectangulares de
portadora f0 , anchura de pulso τ y PRF dada por fp = 1/Tp ; (b) Porción del espectro de
la señal recibida en la cercanı́a de f0 y para una PRF alta que deja zonas libres de clutter.
la obtención de una resolución espacial buena, la presencia de velocidades ciegas se vuelve
importante a no ser que se incremente la PRF, lo que a su vez da origen a la aparición de
ambigüedades en alcance. En estas circunstancias, se habla de un radar Doppler pulsado
en vez de un radar MTI. A veces se habla de radar Doppler pulsado de alta PRF frente
al de PRF media, en el que se reduce la presencia de las ambigüedades de alcance y no se
elimina del todo la degradación por las de tipo Doppler, buscando por tanto una situación
intermedia.
En sus orı́genes analógicos los radares MTI y Doppler pulsados presentaban más diferencias: los MTI usaban magnetrones (de manera que estos radares eran coherentes en
recepción, como hemos mencionado anteriormente) mientras que los radares pulsados
Doppler tenı́an un klystrón como transmisor, y en recepción los primeros utilizaban canceladores de lı́nea de retardo frente a los bancos de filtros analógicos de los de segundo
tipo. En estos momentos los transmisores son amplificadores de alta potencia del mismo
tipo para ambos y el receptor funciona con procesado digital, por lo que la única diferencia
está en la PFR y consiguientemente en el ciclo de trabajo.
4.5.2
Espectro de la señal transmitida
En la figura 4.10 a) se muestra el espectro de la señal transmitida. Ya que es una señal
periódica su espectro es básicamente su serie de Fourier 9 . Realmente, ya que la respuesta
9
Si el espectro lo definimos aquı́ como la transformada de Fourier continua tendrı́amos en realidad una
suma de deltas de Dirac multiplicadas por los coeficientes de la serie de Fourier. Sin embargo, en la figura
se representan los coeficientes de Fourier en el eje de ordenadas. La separación en el eje de abscisas es la
correpondiente a la serie, es decir, 1/Tp = P RF . Los coeficientes siguen la forma de una sinc de anchura
1/Semiduración del pulso = 2/τ muestreada y con aliasing
José Luis Álvarez Pérez
57
impulsional del transmisor no es también una delta de Dirac, el espectro transmitido ha de
sustituir las deltas de Dirac que corresponden a los coeficientes de la serie de Fourier por
lı́neas espectrales de una cierta anchura. Si nos ocupamos ahora de analizar el espectro
de la señal en recepción, incluirá la respuesta impulsional del transmisor más el blanco
más el receptor. En la figura 4.10 b) se muestra el espectro para un radar Doppler aerotransportado (ver figura 4.11) del tipo AWACS (Airborne Warning and Control System).
En este caso, hay que tener en cuenta que nuestra plataforma es móvil y por tanto los
blancos estáticos del suelo realmente se observan con un desplazamiento Doppler, el de
la plataforma 10 . Ası́, podemos observar dos picos dentro de cada una de estas lı́neas
espectrales: uno originado por el retorno llamado de nadir, es decir, por el eco más fuerte,
procedente del lóbulo lateral de la antena que apunta al suelo y que se produce a la
frecuencia de la portadora 11 , y el debido a la contribución del clutter que llega por la
dirección del haz principal. En principio, el clutter estarı́a repartido como una gaussiana
centrada en f = 0, si se utiliza el modelo introducido anteriormente y si no se tuviese
en cuenta el diagrama de radiación de la antena, que es máxima en la dirección de lo
que se denomina haz principal y coloca precisamente en esta posición de frecuencias este
segundo máximo. El clutter que entra en el receptor por la dirección del haz principal se
puede eliminar con un filtro ajustable que siga la posición del Doppler correspondiente a
dicho haz principal. Además se observa la presencia del blanco móvil, en principio fuera
de la lı́nea espectral si su velocidad relativa con respecto a la plataforma es superior a la
máxima entre dicha plataforma y el blanco estático. Si el blanco móvil se encuentra en
la zona del espectro Doppler que carece de clutter, podrá detectarse a distancias mayores
que si su desplazamiento Doppler es pequeño y por tanto embebido en la zona del clutter
ensanchado. También, en la figura 4.10, se observa la presencia de ruido blanco.
La detección del blanco en movimiento se realiza a partir de este escenario con un
banco de filtros Doppler estrechos. Como el blanco se puede encontrar dentro de la lı́nea
de anchura finita de la que estamos hablando, es necesario tener lóbulos laterales en la
antena que sean de poca intensidad, de modo que no ensanchen demasiado la respuesta
impulsional del sistema y por consiguiente la influencia del clutter. En cualquier caso,
el clutter que entra por los lóbulos será un factor de degradación considerable dado que
la PRF es alta y esto impide que se pueda regular la ventana de tiempos de recepción
para evitar, por ejemplo, el retorno de nadir. Por tanto, el factor de mejora de un radar
Doppler pulsado ha de ser más alto que el de un MTI para tener un rendimiento parecido
10
Realmente, es bastante común que un radar MTI esté montado sobre una plataforma móvil. Aunque
no hemos considerado este caso en la sección dedicada a esta radar mencionamos aquı́ los dos efectos que
esto produce: (i) el espectro del clutter ya no está centrado en un Doppler cero sino que se haya repartido
desplazado según la velocidad relativa del punto del que procede; esto se puede corregir procesando una
señal únicamente con clutter y reajustando la frecuencia del coho de acuerdo al nuevo centro Doppler, (ii)
el ensanchamiento del espectro debido a la respuesta impulsional del sistema que ahora incluye los efectos
del movimiento; este problema se compensa transmitiendo dos haces principales de radación ligeramente
desplazados el uno del otro y procesando dos canales, uno con la señal suma y otro con la señal resta.
No entramos en más detalle aquı́. Solamente resta añadir que un sistema que corrige el primer efecto se
denomina TACCAR (Time Averaged Clutter Coherent Airborne Radar), uno que corrige el segundo efecto
de la manera indicada recibe el nombre de DPCA (Displaced Phase Center Antenna) y uno que incorpora
ambas correcciones se llama AMTI (Adaptive MTI).
11
El eco vertical o de nadir sigue una trayectoria vertical y la velocidad radial en ese punto es cero.
58
Radares MTI y Doppler
Figure 4.11: Geometrı́a de un radar aerotransportado, que incluye la dirección de la
trayectoria del eco en nadir y del haz principal.
en términos de presencia de clutter 12
La PRF de un radar pulsado Doppler en banda X para un avión militar puede ser de
100 a 300 kHz. Con una PRF tan alta, los pulsos son obligadamente cortos. No es inusual
que el ciclo de trabajo de un sistema de este tipo sea de 0.3 a 0.5.
4.5.3
Pérdidas por eclipsamiento
Se llaman ası́ a la pérdida de información sobre la posición del blanco por el gating, es
decir, por el hecho de que el radar no recibe cuando está en modo de transmisión. Esto es
un problema cuando tenemos PRFs altas. Si el blanco se mueve rápidamente, la pérdida
de cobertura no será de gran duración. Si el blanco se mueve despacio, el tiempo de
eclipsamiento por gating puede durar más de una PRF.
Si se está siguiendo un único blanco, es posible modificar la PRF de manera dinámica o
bien usar dos PRFs diferentes. También se puede simplemente reducir la PRF ligeramente
para disminuir las pérdidas de eclipsamiento de manera genérica.
4.5.4
Resolución de las ambigüedades en alcance
La presencia de un gran número de ambigüedades en alcance tambiı́en puede ser combatida
utilizando PRFs múltiples, o bien modulando la frecuencia o variando otras caracterı́sticas
del pulso.
Existe también el fenómeno denominado ghosting, por el cual es posible que dos blancos
diferentes produzcan cada uno una ambigüedad diferente pero que llega simultáneamente
al receptor, creando un blanco ghost en una posición donde no hay ningún blanco. Para
evitar este efecto, es beneficioso utilizar más de dos PRFs, de manera que sea más difı́cil
que tres, cuatro o más PRFs sean tales que las ambigüedades de cada una tengan estos
puntos de contacto.
12
Esto hace que si comparamos la If de un radar MTI con la de un radar Doppler pulsado y tenemos
un valor más alto para el del segundo, esto no significa que el clutter tenga menor presencia en este. La
relación de contenido de clutter-If es distinta en uno y en otro porque la PRF ha de ser tenida en cuenta.
José Luis Álvarez Pérez
59
Si se emplean tres PRFs diferentes, se toman tres valores que sean coprimos, es decir,
que no tengan divisores comunes excepto 1, y se aplica algún tipo de algoritmo para
calcular el alcance real de un cierto eco. Uno de estos algoritmos posibles es el teorema
chino del resto 13 , que establece lo siguiente: si n números enteros {n1 , n2 , . . . , nk } son
coprimos, es decir, primos dos a dos, cualquier número m que se conozca solamente a través
de los restos que resultan de dividirlo por los mencionados números se puede determinar
dentro de un factor ± n1 × n2 × · · · × nk . Este teorema se puede combinar con el llamado
algoritmo extendido de Euclides para determinar el valor de m. Supongamos por ejemplo
que se toman PRFs que cuya relación mutua sea 7:8:9. Si tenemos un pulso, posiblemente
ambiguo, separado en una unidad 14 de la primera PRF, en dos unidades de la segunda
PRF y en tres unidades de la tercera, haciendo uso del algoritmo extendido de Euclides,
que no explicamos aquı́, encontramos que, siendo 7 × 8 × 9 = 504, el tiempo de llegada del
eco es compatible con un retardo de m = 498 unidades desde el punto de coincidencia de
las PRFs 15 . Al ser m mayor que cualquiera de las PRFs, se trata de un pulso ambiguo
para todas ellas. El efecto de usar estas tres PRFs es por tanto que podemos caracterizar
el tiempo de retardo de los ecos como si estuviésemos trabajando con una PRF que sea el
producto de las tres PRFs.
El uso de varias PRFs tiene el coste adicional, sin embargo, requiere una mayor potencia
transmitida. Las grandes ventajas de trabajar a PRFs altas son la posibilidad de trabajar a
frecuencias altas que producen diagramas de radiación más estrechos y de obtener medidas
precisas de la velocidad de los blancos.
A veces resulta útil que una de las PRFs sea de caracter intermedio entre las que
caracterizarı́an al sistema como propio de un radar MTI y las que lo caracterizarı́an como
un radar Doppler pulsado, a fin de incorporar las caracterı́sticas de menor importancia de
las ambigüedades en alcance y mayor facilidad de distinguir diferentes blancos que se encuentren en una formación de vuelo más compacta. Incluso es posible incorporar también
una PRF baja que nos permita hacer estimaciones no destinadas a la determinación de
velocidades y menos perjudicada por las velocidades ciegas. Un problema muy a tener en
cuenta si se usa una multiplicidad de PRFs es la heterogeneidad de cada canal, debida a
la diferencia en la presencia de clutter en cada una y la diferencia de longitud de los pulsos
en cada caso para mantener el ciclo de trabajo constante, algo muy necesario para el buen
rendimiento del radar, muy dependiente de los ciclos de calentamiento de los transmisores.
El cambio en la longitud de los pulsos ha de ser tenida en cuenta en el diseño de los filtros
adaptados. Todo esto hace que un radar del tipo AWACS sea mucho más complejo que
un AMTI.
13
Este teorema se debe al matemático chino Sun Tzu, del siglo III a.C.
Definimos una unidad como la constante que convierte las PRFs en 7, 8 y 9, respectivamente.
15
Un problema semejante que puede ayudar a comprender mejor la solución es el siguiente: si un número
m de personas es tal que formando grupos de 7 queda 1 sin agrupar, formando grupos de 8 quedan 2 y
formando grupos de 9 sobran 3, se puede comprobar que se trata de 498 personas, o bien de 498 + n × 504.
Si los restos fuesen números reales con decimales en vez de enteros, el problema no varı́a en esencia.
14

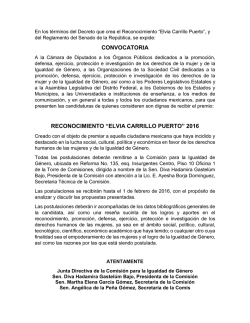


© Copyright 2026