
Puente H - Tec. Armando Lima Choque
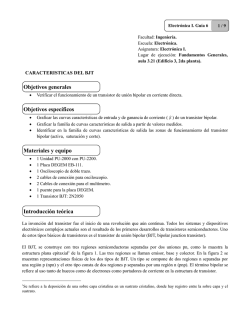
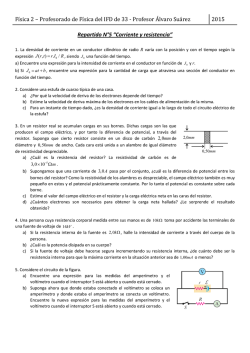
Puente H El conocimiento de los sistemas de control de motores de corriente continua C.C. (o DC) de pequeña potencia es fundamental para cualquier aficionado que quiera realizar proyectos con micro controladores. El primer problema a considerar es la forma de alimentar el motor ya que la corriente máxima que puede proporcionar cualquier línea de salida de un micro controlador está limitada a 25 mA como máximo. Esta corriente es demasiado pobre para alimentar un motor DC directamente. Por ello, se hace necesaria la utilización de transistores que pueden ir configurados en diferentes disposiciones, siendo la más utilizada el puente en H. Es conocido que el sentido de giro de motor de corriente continua depende de la polaridad que se aplica sus terminales, en consecuencia para cambiar el giro es necesario intercambiar los terminales de motor o bien cambiar la polaridad de la alimentación. La forma más sencilla de controlar un motor de corriente continua de baja potencia, en velocidad y sentido de giro, es mediante la conmutación electrónica de unos circuitos realizados básicamente con transistores que reciben el nombre de puente en H., como se describe en la figura. Este circuito está formado por cuatro transistores que trabajan en conmutación y se comportan como interruptores controlados por la señal que les llega a las entradas 1 y 2. Su funcionamiento es el siguiente: * Cuando se activa la entrada 1 a nivel alto y la entrada 2 a nivel bajo los transistores Q3 y Q4 (PNP y NPN) entran en saturación simultáneamente, mientras que Q5 y Q6 están en corte por ser de signo contrario (NPN y PNP despectivamente). En estas condiciones el motor gira en un sentido, por ejemplo en el contrario a las agujas del reloj. * Cuando se vierten las señales de entrada, es decir 1 a nivel bajo y 2 a nivel alto, los transistores que se saturan son Q3 y Q6, mientras que los que entran en estado de cortes son Q4 y Q5. Esto hace que motor gire en sentido contrario. El problema de este tipo de circuitos es la caída de tensión real que hay en los transistores y que habrá que recompensarla con la tensión de alimentación. Lista de componentes Semiconductores Q1, Q2 – BC548 – Transistor 500mA Q3, Q4 – TIP31 – Transistor 40W Q5, Q6 – TIP32 – Transistor 40W D1 – D4 – 1N4148 – 100PRV Resistencias R1, R4 – 1KΩ – Resistor de ¼ W R2, R3 – 100Ω – Resistor de ¼ W R3 – 1Ω – Resistor de 1W Otros Motor DC 40W Max Varios Mica Aislante, Arandelas, Tornillos, Disipador para TO220 www.alcircuits.net16.net/pcb/puente_h.pdf Tec. Armando Lima Ch. : 79648843 - 74866399






© Copyright 2026