
TRABAJO Título
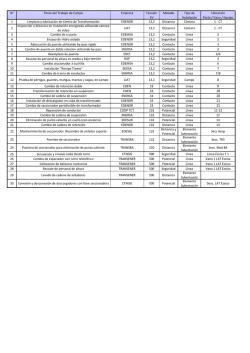
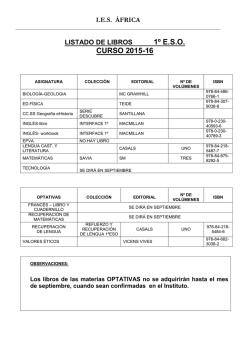
TRABAJO Título 1/5 Reforma de elementos de maniobra para su integración a Telecontrol Nº de Registro: (Resumen) Empresa o Entidad EDENOR S.A. Nombre Basile, Luis Alberto Autores del Trabajo País Argentina e-mail [email protected] Chiocconi, Darío Nestor Argentina [email protected] Celso, Belisario Argentina [email protected] Fernandez, Federico Alan Argentina [email protected] Scuncia, Guillermo Argentina [email protected] Palabras Clave Telecontrol de Seccionalizadores y Reconectadores MT RESUMEN En el presente trabajo se describen las distintas reformas realizadas en equipos de protección y maniobra de Media Tensión para su incorporación al staff de elementos telecontrolados del Centro de Control Red de Edenor S.A. Las mencionadas reformas se llevaron a cabo en equipos de protección ampliamente utilizados en la red de media tensión, que debido a la época de su diseño no presentaban la posibilidad de telecontrol y/o telesupervisión nativa. 1 Los equipos sobre los cuales se efectuaron las reformas son los siguientes: • • • • Cooper TVS-15 Cooper TVS-27 Cooper Form 3A GN3-F2 INTRODUCCIÓN El área de concesión de nuestra empresa comprende zonas de difícil acceso, las cuales en condiciones climáticas adversas son prácticamente inaccesibles. En estos casos es importante contar los elementos telecontrolados a fin de poder reestablecer el servicio en el menor tiempo posible. Dada la gran cantidad de reconectadores y seccionalizadores sin posibilidad de maniobra a distancia instalados en toda la extensión del territorio que atiende Edenor S.A. y en particular en las zonas mencionadas, se presentó la necesidad de tener telecomando en dichos puntos de la red. 1/5 TRABAJO Inicialmente se planteó reemplazar los equipos, hasta ese momento considerados obsoletos, por elementos de maniobra modernos con telecontrol nativo. El estudio realizado sobre este planteamiento arrojó un costo económico con una amortización muy extendida en el tiempo. A partir de esto y con la experiencia que se tenía en el campo de la electrónica y la mecánica, se comenzó a analizar caso por caso si era factible técnica y económicamente la reforma de los equipos de maniobra existentes de modo tal que cumplieran con las necesidades de operación de la Red MT. 2 RESEÑA Y FUNDAMENTOS Los avances tecnológicos en el sector de las protecciones, han conllevado a la integración de interfaces para telecontrol a los equipos de protección de media tensión. El telecontrol encontró lugar fuera de las puertas de las subestaciones para abarcar ahora los reconectadores y seccionalizadores que se distribuyen geográficamente por toda el área de concesión. La idea fuerza fue entonces la de otorgarle al centro de control de red, la mayor cantidad de estados, medidas y comandos posibles de estos equipos con interface de comunicación compatibles con los protocolos estándares de los Sistemas SCADA. Fue así que se logró con éxito la implementación de la totalidad de los 20 equipos (Schneider RL-27, Cooper Form 5 y Cooper Form6). Figura 2.1: protocolizado Comunicación de un 2/5 Dada la funcionalidad que adquirió la red en las zonas, en las cuales se hallaban los equipos antes mencionados se planteó la necesidad de incorporar otros elementos de maniobras existentes en la red que no están diseñados para ser telecontrolados. La investigación se centró en seccionalizadores y reconectadores cuya confiabilidad está comprobada por el área especializada en protecciones. El principal desafío consistía en mantener las cualidades de la protección y a la vez dotarla de telemandos. A continuación se presentan las modificaciones/adaptaciones realizadas para cada elemento; en cada caso se realizaron los ensayos de las distintas variantes que podrían afectar el funcionamiento tanto de la protección como de las adecuaciones realizadas, siendo los resultados satisfactorios. 3 CASOS DE ÉXITO 3.1 COOPER TVS 15/27 Para estos equipos ,se realizó un análisis circuital tanto de la etapa de potencia como del control electrónico, en busca de las señales que reflejen el estado del seccionador de potencia, y también de aquellos puntos del circuito sobre los cuales se pueda actuar para ejecutar los comandos de cierre y apertura. La modificación tecnológica se puede dividir en 3 etapas. equipo 2/5 TRABAJO 3/5 Figura 3.1: Diagrama en bloques de la adecuación • La etapa inicial o Interface de adaptación de señales, convierte la señales existentes en el circuito de control original del equipo, en estados legibles por la unidad terminal remota, también es la placa encargada de inyectar las señales para realizar los comandos en dicho control. • La unidad terminal remota, toma por un lado los estados que le otorga la etapa de interface, y por otro lado de ella salen las señales que pasando por dicha placa ejecutaran los comandos. La funcionalidad de esta etapa es concentrar los estados y protocolizarlos para ser interpretados por el sistema SCADA. • La Interface de comunicación establece el vínculo bidireccional entre el centro de control de red (CCR) y la unidad terminal remota, la cual le otorga a esta interface las tramas de datos protocolizadas a través de un puerto RS-232. Asegurando la compatibilidad con cualquier interface sea esta fibra óptica, enlace de radio o comunicación celular. Figura 3.4: Fotografía de un seccionalizador adaptado a telecontrol. Actualmente hay en servicio una cantidad de 40 equipos . 3.2 COOPER FORM3 Figura 3.2: Vista frontal del control de un TVS15 Figura 3.5: Unidad control de un Cooper Form3A Figura 3.3: Unidad de potencia de un TVS15 El proceso de adecuación de este reconectador se realizó en base a esquemas circuitales de módulos de apertura y cierre locales. Es decir, originalmente pensados para realizar maniobras insitu a través de pulsadores. Dada la antigüedad de este reconectador, los módulos fueron imposibles de conseguir, razón por la cual se optó por replicar 3/5 TRABAJO 4/5 estos módulos incorporándolos como etapas de una placa de interface. eficaz y de implementación insitu (es decir, sin ser necesario desmontarlo de la red). La modificación tecnológica se puede dividir en 3 etapas al igual que en el equipo descripto anteriormente, por lo que solo haremos hincapié en la etapa de adaptación o interface. El objetivo fue realizar una reforma no invasiva en el equipo, por lo cual se optó por reproducir la operación con pértiga a través de un mecanismo electroneumático. La unidad de adaptación además de contener los módulos de comandos del seccionador, posee un comando para la habilitación / deshabilitación del recierre. En ella también se concentran las señales del estado del seccionador , recierre y bloqueo de interruptor. La adecuación neumática es modular, la misma se encuentra dentro de un gabinete de pequeñas dimensiones (20cm x 10cm x 60cm) , siendo esta lo suficientemente manipulable como para poder instalarla desde la barquilla de un hidroelevador convencional, con un anclaje simple y fuerte. Actualmente hay en servicio una cantidad de 50 equipos. La misma respeta las distancias dieléctricas que aseguran la exención de riesgos de descarga sobre su chasis. 3.3 GN3F2 La adecuación de este equipo en particular presentó un desafío aún mayor. La dificultad radicaba en que la protección brindada por este seccionalizador es netamente hidráulica, es decir, no existe en el electrónica de control desde donde leer señales ó replicar mando alguno. Dentro del módulo se encuentra dos electroválvulas 3/2 , un compresor de aire, una trampa de humedad y filtros de aire, también un pistón neumático de doble efecto, por sobre el cual se abrazan sensores de efecto hall que permiten determinar la exacta posición del cilindro neumático asociado a la palanca del seccionador y a la palanca de maniobra manual por pértiga, pudiendo así determinar el estado real (abierto/cerrado) de la protección. Básicamente consiste en un movimiento lineal asociado a la palanca del seccionador. No interfiriendo en la operación manual por pértiga ni en la apertura hidráulica por protección gracias a la utilización de dos electroválvulas N/A que así lo garantizan. Figura 3.7: Vista lateral del módulo de adaptación neumático para el GN3F2. Figura 3.6: Fotografía de un GN3F2 colocado en la red aérea de MT. Sin embargo, la gran cantidad de alimentadores protegidos por dichos seccionalizadores (270), impulsó a la búsqueda de un sistema de adaptación 4/5 TRABAJO 5/5 El accionamiento tanto de las válvulas como del compresor es realizado por una electrónica de control ubicada en un gabinete IP65 que es vinculado al módulo neumático por medio de un cable de datos correctamente blindado. Este módulo electrónico explora los sensores de posicionamiento de la palanca en tiempo real, y por consiguiente del seccionador, y los refleja a la unidad terminal remota. También recibe los comandos de maniobra desde el CCR a través de la UTR, ejecutándolos sobre el equipo. En caso de que la maniobra no pueda ser realizada, se alarma y refleja este estado también hacia el centro de control de red. Figura 3.9: Fotografía de un GN3F2 con la adaptación instalada, en este caso siendo maniobrado con pértiga. Conclusiones Figura 3.8: Electrónica de control diseñada para el GN3F2 Dado que el ambiente electromagnético en donde se encuentra inmersa esta electrónica es ruidoso, y que una falla en la ejecución de un mando a este nivel es riesgoso, se realizaron ensayos de laboratorio con el personal del área de protecciones, asegurando que las perturbaciones provocadas por el campo eléctrico y magnético no afectan a su correcto funcionamiento. En una red tan extensa como la que posee Edenor S.A. es importante disminuir los tiempos de atención de fallas a fin de mejorar el servicio de los clientes. El telecontrol y la telesupervisión de los distintos elementos existentes en la red es parte fundamental de esta premisa. Dada la necesidad de incrementar la cantidad de elementos telecontrolados que faciliten la operación de la red de MT, y con la base en la confiabilidad de estas protecciones resulta muy interesante la posibilidad de continuar realizando adaptaciones que mantengan vigentes los equipos ya existentes. 5/5


© Copyright 2026