
Control de seguimiento de trayectoria en el espacio del error para el
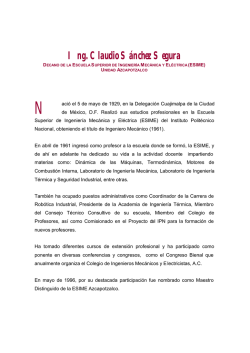
ARTÍCULO No. MEC-05 ARTÍCULO: ACEPTADO POR REFEREO . 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) Control de seguimiento de trayectoria en el espacio del error para el helicóptero tándem 3DOF. J. G. Alonso Alfaro, S.A. Rodríguez Paredes, B.B. Salmerón García, J. Martínez Martínez. I. INTRODUCCIÓN Resumen— En este artículo se presenta un análisis del sistema no lineal correspondiente al helicóptero tándem 3DOF, se propone un cambio de variable en el control con el fin de desacoplar las ecuaciones que describen la dinámica del helicóptero. Posteriormente se realiza una prueba en el sistema desacoplado y se verifica que el sistema se puede linealizar de manera exacta. También se presenta un análisis del sistema en el espacio del error, donde el sistema es lineal e inestable, por lo que se recurre a una retroalimentación estática del vector de estados que permite estabilizar el sistema. Se propone un controlador que permite al sistema seguir una trayectoria previamente definida. Palabras Clave— Linealización Controlador, Espacio del error. exacta, L a investigación y el desarrollo de los Vehículos Aéreos no Tripulados es muy importante, ya que son sistemas que pueden contribuir a la realización de gran variedad de actividades de la vida diaria y de esta manera reducir costos, tiempo, accidentes y recursos tanto humanos como materiales. Además de que estos vehículos pueden contribuir al desarrollo tecnológico y económico del país. Actualmente los Vehículos Aéreos no Tripulados forman son pieza clave para desarrollar tareas de aplicación civil como monitoreo, patrullaje, inspección, etc. El helicóptero tándem 3DOF, es un prototipo de estudio en el cual se pueden implementar diversas estrategias de control que permitan manipular los ángulos de navegación viaje, traslación y elevación, de esta manera poder controlar el vuelo del helicóptero. Las ecuaciones diferenciales que describen la dinámica del helicóptero [10] están acopladas por lo que un cambio de variable adecuada en el control permite desacoplar dichas ecuaciones, así poder diseñar un controlador para el sistema no lineal desacoplado. Desacoplar, Abstract— This paper presents an analysis of the system nonlinear for the tandem helicopter 3DOF, a change of variable proposed in control in order to decouple the equations describing the dynamics of helicopter. Subsequently a test is performed in the decoupled system and verifies that the system can be linearized exactly. A system analysis is also presented in the space of error, where the system is linear and unstable, so it uses a static state vector feedback that stabilizes the system. A controller allowing the system to follow a predefined path is proposed. II. DESARROLLO Y/O CAMPO TEÓRICO Keywords— Linearization exactly, Découpler, Controller, Space of error. 2.1 Modelado matemático. Considere la Figura 1 y denote los siguientes ángulos 𝜃𝑒 como elevación, 𝜃𝑟 traslación (por rate en inglés) y𝜃𝑝 como inclinación (por pitch en inglés). Jorge Alonso estudiante del Instituto Politécnico Nacional/ SEPI ESIME unidad Azcapotzalco, D.F. México, correo: [email protected]. Salvador Rodríguez adscrito al Instituto Politécnico Nacional/ SEPI ESIME unidad Azcapotzalco, D.F. México, correo: [email protected]. Bernardino Salmerón adscrito al Instituto Politécnico Nacional/ SEPI ESIME unidad Azcapotzalco, D.F. México, correo: [email protected]. Jesús Martínez estudiante del Instituto Politécnico Nacional/ SEPI ESIME unidad Azcapotzalco, D.F. México, correo: [email protected]. México D.F., 19 al 23 de octubre 2015 1 ARTÍCULO No. MEC-05 ARTÍCULO: ACEPTADO POR REFEREO 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) El sistema de ecuaciones (1) - (3) es un sistema no lineal de ecuaciones que están acopladas, por lo que se propone un cambio de variables que permita desacoplar el problema en dos dinámicas. Primero los términos de fuerza se reescriben en términos de voltajes: 𝑓𝑓 = 𝑘𝑓 𝑣𝑓 , 𝑓𝑏 = 𝑘𝑏 𝑣𝑏 , con 𝑘 = 𝑘𝑓 = 𝑘𝑏 . Luego se usa una transformación simétrica en términos de 𝑢𝑓 y 𝑢𝑏 , dos nuevas variables de control: − 1�2 𝑣𝑓 �𝑣 � = � 1� 𝑏 2 1� 𝑢 2� � 𝑓 � 1� 𝑢𝑏 2 Las cuales permiten reescribir el sistema de la manera siguiente: 𝐽𝑒 𝜃̈𝑒 = 𝑙𝑎 𝑘𝑢𝑏 − 𝑙𝑎 𝑓𝑔 cos 𝜃𝑒 𝐽𝑟 𝜃̈𝑟 = −𝑙𝑎 𝑓𝑔 sin 𝜃𝑝 𝐽𝑝 𝜃̈𝑝 = 𝑙ℎ 𝑘𝑢𝑓 Figura 1. Diagrama de cuerpo libre helicóptero 3 DOF 2.2 Sobre la linealización exacta. Del diagrama de cuerpo libre se obtienen las siguientes ecuaciones que describen la dinámica del helicóptero [10]: Proponiendo un cambio de variable adecuado en el control 𝑢𝑏 de la ecuación (4) se puede linealizar de manera exacta sin problema alguno. 𝐽𝑒 𝜃̈𝑒 = 𝑙𝑎 �𝑓𝑓 + 𝑓𝑏 � − 𝑙𝑎 𝑓𝑔 cos 𝜃𝑒 (1) (2) 𝐽𝑟 𝜃̈𝑟 = −𝑙𝑎 𝑓𝑔 sin 𝜃𝑝 (3) 𝐽𝑝 𝜃̈𝑝 = 𝑙ℎ �𝑓𝑓 − 𝑓𝑏 � Las ecuaciones (5) y (6) se pueden reescribir como: 𝜃̈𝑟 = −𝑘𝑝 sin 𝜃𝑝 𝜃𝑝̈ = 𝑢 donde 𝐽𝑒 , 𝐽𝑟 y 𝐽𝑝 denotan los momentos de inercia con respecto a los ejes de elevación, traslación e inclinación; 𝑙𝑎 , 𝑙ℎ son longitudes que se muestran en la Figura 1; 𝑓𝑓 , 𝑓𝑏 y 𝑓𝑔 son fuerzas que se ejercen sobre el helicóptero en la parte frontal, trasera (estas fuerzas son las variables de entrada o de control) y de gravedad respectivamente. La tabla 1 muestra los valores a asignar para los parámetros del sistema [14]. Símbolo 𝐽𝑒 𝐽𝑟 𝐽𝑝 𝑙𝑎 𝑙ℎ Descripción Momento de inercia elevación. Momento de inercia de traslación. Momento de inercia de inclinación. Distancia de 0 al centro de masa del helicóptero. Distancia de 0’ a cualquiera de los centros de masa de los rotores. Donde 𝑘𝑝 = 𝑙𝑎 𝑓𝑔 𝐽𝑟 y𝑢 = (7) (8) 𝑙ℎ 𝑘𝑢𝑓 �𝐽 . 𝑝 Su representación en variables de estado es: 𝜃̇ 𝜔𝑟 𝜃𝑟 0 ⎡ 𝑟⎤ 𝜔𝑟 −𝑘𝑝 𝑠𝑖𝑛𝜃𝑝 ⎢ 𝜔̇ 𝑟 ⎥ 0 � + � � 𝑢, 𝑥 = � 𝜃 � ⎢ 𝜃̇ ⎥ = � 𝜔𝑝 0 𝑝 ⎢ 𝑝⎥ 𝜔 1 0 𝑝 ⎣𝜔̇ 𝑝 ⎦ Valor 0.83 𝑘𝑔 ∙ 𝑚2 0.83 𝑘𝑔 ∙ 𝑚2 Si el sistema compuesto por las ecuaciones (7) y (8) Lema 4.2.2 ∃ 𝜆en 𝑢 de 𝑥0 [ver [16]]. 0.034 𝑘𝑔 ∙ 𝑚2 i. 𝑟𝑎𝑛𝑘�𝑔(𝑥0 ), 𝑎𝑑𝑓 𝑔(𝑥0 ), … , 𝑎𝑑𝑓𝑛−1 𝑔(𝑥0 )� = 𝑛 ii. 𝑠 = 𝑠𝑝𝑎𝑛�𝑔, 𝑎𝑑𝑓 𝑔, … , 𝑎𝑑𝑓𝑛−2 �𝑒𝑠 𝑖𝑛𝑣𝑜𝑙𝑢𝑡𝑖𝑣𝑜. 0.660 𝑚 Entonces 0.178 𝑚 Tabla 1. Parámetros helicóptero 3DOF. México D.F., 19 al 23 de octubre 2015 (4) (5) (6) 2 𝑔 𝑡 = ( 0 0 0 1) 𝜕𝑔 𝜕𝑓 𝑎𝑑𝑓 𝑔 = [𝑓, 𝑔] = 𝑓− 𝑔, 𝑎𝑞𝑢í𝑅 = 0 𝜕𝑥 𝜕𝑥 𝑎𝑑𝑓𝑛 𝑔 = �𝑓, 𝑎𝑑𝑓𝑛−1 𝑔�, 𝑛 ≥ 1 ARTÍCULO No. MEC-05 ARTÍCULO: ACEPTADO POR REFEREO 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) 0 0 0 − 𝑘𝑝 cos 𝜃𝑝 0 0 �� = 𝑟𝑎𝑛𝑘 �� � , � � , � 0 −1 0 0 1 0 0 0 0 0 − 𝑘𝑝 cos 𝜃𝑝 − 𝑘𝑝 sin 𝜃𝑝 0 0 �,� ��=3 𝑟𝑎𝑛𝑘 �� � , � � , � 0 −1 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 −𝑘𝑝 cos 𝜃𝑝 0 0 �� � = � � 𝑎𝑑𝑓 𝑔 = 0𝑓 − � 1 0 −1 0 0 0 0 1 0 0 0 0 𝑎𝑑𝑓2 𝑔 = �𝑓, 𝑎𝑑𝑓 𝑔� 0 0 0 0 0 1 − 𝑘𝑝 cos 𝜃𝑝 0 0 − 𝑘𝑝 cos 𝜃𝑝 0 0 2 𝑎𝑑𝑓 𝑔 = 0𝑓 − � �� � = � � 1 −1 0 0 0 0 0 0 0 0 0 0 𝑎𝑑𝑓3 𝑔 = �𝑓, 𝑎𝑑𝑓2 𝑔�, 𝑛 − 1 = 3 𝜔𝑟 0 0 0 0 0 0 𝑘𝑝 sin 𝜃𝑝 0 −𝑘𝑝 sin 𝜃𝑝 3 �� � 𝑎𝑑𝑓 𝑔 = 0𝑓 − � 𝜔𝑝 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 − 𝑘𝑝 cos 𝜃𝑝 0 −𝑘𝑝 cos 𝜃𝑝 �� �= −� 1 0 0 0 0 0 0 0 0 0 −𝑘𝑝 cos 𝜃𝑝 𝑘𝑝 cos 𝜃𝑝 0 𝑘 𝜔 sin 𝜃𝑝 0 �-� =� 𝑝 𝑝 � = �𝑘𝑝 𝜔𝑝 sin 𝜃𝑝 � 0 0 0 0 0 0 Las condiciones i y ii del Lema 4.2.2 [16] se verifican por lo que se el sistema se puede linealizar de manera exacta. Además a continuación se muestra que el sistema en el espacio del error es lineal. 2.3 Linealización en el espacio del error. Para encontrar un modelo lineal para el control del helicóptero 3DOF, la clave es seleccionar las siguientes variables en el espacio del error: la desviación en la elevación 𝑒𝑟 = 𝜃𝑟 − 𝜃𝑟𝑑 y en la inclinación 𝑒𝑝 = −𝑘𝑝 sin 𝜃𝑝 + 𝑘𝑝 sin 𝜃𝑝𝑑 , donde las señales de referencia de elevación e inclinación son respectivamente 𝜃𝑟𝑑 y 𝜃𝑝𝑑 . Considere las ecuaciones (9) y (10) como el sistema de referencia, donde 𝜑 es la nueva señal del control. Ahora se verifica que se cumple la condición i del Lema: −𝑘𝑝 cos 𝜃𝑝 0 0 0 − 𝑘𝑝 cos 𝜃𝑝 𝑘𝑝 𝜔𝑝 sin 𝜃𝑝 0 0 �� �,� ↔ �� � , � � , � 0 −1 0 0 0 1 0 0 𝜃̈𝑟𝑑 = −𝑘𝑝 sin 𝜃𝑝𝑑 𝜃̈𝑝𝑑 = 𝜑 Derivando en dos ocasiones la desviación en la elevación se puede determinar 𝑒̈𝑟 como sigue: 𝒓𝒂𝒏𝒌�𝒈(𝒙𝟎 ), 𝒂𝒅𝒇 𝒈(𝒙𝟎 ), 𝒂𝒅𝟐𝒇 𝒈, 𝒂𝒅𝟑𝒇 𝒈(𝒙𝟎 )� = 4 𝒆̈ 𝒓 = 𝜽̈𝒓 − 𝜽̈𝒓𝒅 0 0 0 0 0 − 𝑘𝑝 cos 𝜃𝑝 �� � �� �� 0 −1 0 1 0 0 𝜃𝑝 =0 𝑔 × 𝑎𝑑𝑓 𝑔 = 0 𝜕 𝜕𝑔 2 𝑎𝑑 𝑔 𝑔 × 𝑎𝑑𝑓2 𝑔 = � 𝑎𝑑𝑓2 𝑔� 𝑔 − 𝜕𝑥 𝜕𝑥 𝑓 0 0 0 0 0 0 0 𝑘𝑝 sin 𝜃𝑝 0 0 2 �� � −0 = 0 𝑔 × 𝑎𝑑𝑓 𝑔 = � 0 −1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 − 𝑘𝑝 sin 𝜃𝑝 0 0 𝑘𝑝 sin 𝜃𝑝 0 0 2 �� � = � � 𝑎𝑑𝑓 𝑔 × 𝑎𝑑𝑓 𝑔 = � 1 −1 0 0 0 0 0 0 0 0 0 0 (11) Sustituyendo las ecuaciones (7) y (9) en (11), se puede determinar el error 𝑒̈𝑟 en términos de 𝑒𝑝 . 𝑒̈𝑟 = 𝜃̈𝑟 − 𝜃̈𝑟𝑑 = −𝑘𝑝 sin 𝜃𝑝 + 𝑘𝑝 sin 𝜃𝑝𝑑 = −𝑘𝑝 �sin 𝜃𝑝 − sin 𝜃𝑝𝑑 � (12) ����������� = −𝑘𝑝 𝑒𝑝 𝑒𝑝 (13) La desviación en el error de 𝜃𝑝 se define por 𝑒𝑝 = sin 𝜃𝑝 − sin 𝜃𝑝𝑑 , por lo que derivando en dos ocasiones con respecto del tiempo se puede determinar 𝑒̈𝑝 . 2 2 𝑒̈𝑝 = 𝜃̈𝑝 cos 𝜃𝑝 − 𝜃𝑝̇ sin 𝜃𝑝 − 𝜃̈𝑝𝑑 cos 𝜃𝑝𝑑 + 𝜃̇𝑝𝑑 sin 𝜃𝑝𝑑 (3) Luego 𝛿 = �𝑔, 𝑎𝑑𝑓 𝑔, 𝑎𝑑𝑓2 𝑔� es involutivo 0 0 0 0 − 𝑘𝑝 cos 𝜃𝑝 − 𝑘𝑝 sin 𝜃𝑝 0 0 �,� �� 〈∀𝜃𝑝 〉 ↔ �� � , � � , � 0 −1 0 0 0 1 0 0 México D.F., 19 al 23 de octubre 2015 (1) (2) Si 𝜃̈𝑝 = 𝑢 y 𝜃̈𝑝𝑑 = 𝜑, se tiene que: 2 2 𝑒̈𝑝 = 𝑢 cos 𝜃𝑝 − 𝜃𝑝̇ sin 𝜃𝑝 − 𝜑 cos 𝜃𝑝𝑑 + 𝜃̇𝑝𝑑 sin 𝜃𝑝𝑑 (4) 3 ARTÍCULO No. MEC-05 ARTÍCULO: ACEPTADO POR REFEREO 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) 2 Si se propone 𝑤 = 𝑢 cos 𝜃𝑝 − 𝜃𝑝̇ sin 𝜃𝑝 − 𝜑 cos 𝜃𝑝𝑑 + 2 𝜃̇𝑝𝑑 sin 𝜃𝑝𝑑 , el sistema puede reescribirse como se muestra en las ecuaciones (16) y (17) , el cual es un sistema lineal en el espacio de error. 𝑒̈𝑟 = −𝑘𝑝 𝑒𝑝 𝒆̈ 𝒑 = 𝒘 garantiza la estabilidad del sistema al encontrarse las raíces en el semiplano complejo izquierdo, con está analogía se desarrolla el polinomio de cuarto grado de la ecuación y se iguala a la ecuación (19) para encontrar los valores de 𝑎0 , 𝑎1 , 𝑎2 𝑦𝑎3 . (𝑠 + 10)4 = 𝑠 4 + 4𝑠 3 + 6𝑠 2 + 4𝑠 + 1 = 𝑠 4 + 𝑠 3 𝑎3 + 𝑠 2 𝑎2 + 𝑠𝑎1 + 𝑎0 (5) (6) La representación del sistema en variables de estado se muestra a continuación. 𝒆̇ 𝒓 𝟎 ⎡ 𝒆̈ ⎤ ⎢ 𝒓 ⎥ = �𝟎 𝟎 ⎢𝒆̇ 𝒑 ⎥ 𝟎 ⎣𝒆̈ 𝒑 ⎦ 𝟎 𝟏 𝟎 −𝒌𝒑 𝟎 𝟎 𝟎 𝟎 𝟎 𝟎 𝒆𝒓 𝟎 𝒆̇ 𝒓 � � � + �𝟎� 𝒘 𝟎 𝟏 𝒆𝒑 𝟎 𝒆̇ 𝒑 𝟏 𝑒𝑟 0 0 1 𝑒̇𝑟 −𝑘𝑝 0 0 � �𝑒𝑝 � 0 1 0 4000 −600 −40 𝑒̇𝑝 0 0 =� 0 10000 (18) (20) La figura 2 muestra la respuesta del Sistema en el espacio del error donde puede observarse la señal en azul como la referencia del sistema y las demás señales correspondientes a los errores los cuales tienden a 0. Los polos del sistema de la ecuación (18) se encuentran en el origen por lo que el sistema es inestable. Para estabilizar el sistema en el espacio del error se propone 𝑤 = 𝐴𝑒 = 𝑎0 𝑒𝑟 + 𝑎1 𝑒̇𝑟 − 𝑎2 𝑒𝑝 − 𝑎3 𝑒̇𝑝 donde la selección adecuada de los elementos del covector 𝐴 garantiza la estabilidad del sistema en lazo cerrado. Si 𝑒̈𝑝 = 𝑤 = 𝑎0 𝑒𝑟 + 𝑎1 𝑒̇𝑟 − 𝑎2 𝑒𝑝 − 𝑎3 𝑒̇𝑝 (19) Por lo que ahora el sistema en el espacio del error esta dado por: 𝑒̈𝑟 = −𝑘𝑝 𝑒𝑝 𝑒̈𝑝 = 𝐴𝑒 Figura 2. Respuesta del sistema en el espacio del error. Donde 𝑒̈𝑝 = 𝑎0 𝑒𝑟 + 𝑎1 𝑒̇𝑟 − 𝑎2 𝑒𝑝 − 𝑎3 𝑒̇𝑝 𝑒̇𝑟 0 ⎡ 𝑒̈ ⎤ 𝑟 ⎢ ⎥ = �0 0 ⎢𝑒̇𝑝 ⎥ 0 ⎣𝑒̈𝑝 ⎦ 0 0 =� 0 𝑎0 1 0 0 0 0 −𝑘𝑝 0 0 0 0 𝑒𝑟 0 𝑒̇𝑟 � � � + �0� 𝐴𝑒 0 1 𝑒𝑝 0 𝑒̇𝑝 1 Sustituyendo la ecuación (19) en la ecuación (15) y despejando a 𝑢 se encuentra el control diseñado en el espacio del error. 2 0 0 1 0 0 −𝑘𝑝 =� 0 0 0 0 0 0 0 + �0� �𝑎0 𝑒𝑟 + 𝑎1 𝑒̇𝑟 − 𝑎2 𝑒𝑝 −𝑎3 𝑒̇𝑝 � 0 1 𝑒𝑟 0 1 0 𝑒̇𝑟 0 −𝑘𝑝 0 � �𝑒𝑝 � 0 1 0 𝑎1 −𝑎2 −𝑎3 𝑒̇𝑝 2 2 𝑢 cos 𝜃𝑝 − 𝜃̇𝑝 sin 𝜃𝑝 − 𝜑 cos 𝜃𝑝𝑑 + 𝜃̇𝑝𝑑 sin 𝜃𝑝𝑑 = 𝑎0 𝑒𝑟 + 𝑎1 𝑒̇𝑟 − 𝑎2 𝑒𝑝 − 𝑎3 𝑒̇𝑝 Despejando a 𝑢 𝑢= 2 2 𝑎0 𝑒𝑟 +𝑎1 𝑒̇𝑟 −𝑎2 𝑒𝑝 −𝑎3 𝑒̇𝑝 +𝜃̇𝑝 sin 𝜃𝑝 +𝜑 cos 𝜃𝑝𝑑 −𝜃̇𝑝𝑑 sin 𝜃𝑝𝑑 cos 𝜃𝑝 (21) Ahora puede sustituirse la entrada𝑢 del sistema ecuación (21) en el sistema no lineal ecuaciones (7) y (8). La figura 3muestra la estructura para implementar el control 𝑢 al sistema no lineal, siendo la referencia las ecuaciones (9) y Igualando la ecuación (19) al polinomio de cuarto grado deseado de la ecuación (20) y seleccionando 𝑎 = 10 se México D.F., 19 al 23 de octubre 2015 2 𝑒̈𝑝 = 𝑢 cos 𝜃𝑝 − 𝜃𝑝̇ sin 𝜃𝑝 − 𝜑 cos 𝜃𝑝𝑑 + 𝜃̇𝑝𝑑 sin 𝜃𝑝𝑑 0 𝑒𝑟 0 𝑒̇𝑟 �� � 1 𝑒𝑝 0 𝑒̇𝑝 4 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. MEC-05 ARTÍCULO: ACEPTADO POR REFEREO (10). IV. AGRADECIMIENTOS Los autores agradecen al Instituto Politécnico Nacional, a la Sección de estudios de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco, al Consejo Nacional de Ciencia y Tecnología y al Instituto de Ciencia y Tecnología del Distrito Federal por el apoyo brindado y al proyecto SIP 20150607. V. REFERENCIAS [1] KenzoNonami, FaridKendoul, SatoshiSuzukiWei Wang, DaisukeNakaza-wa. Autonomous FlyinRobots, Unmanned Aerial Vehicles and Micro Aerial Vehicles, Springer (2010). [2] Kimon P. Valavanis. Advances in Unmanned Aerial Vehicles, University of South Florida Tampa, Florida, USA, Springer (2007). [3] Gareth D. Padfield. Helicopter .ight dynamics, Editorial Blackwell Publishing 2a edición (2007). [4] Kimon P. Valavanis. Advances in Unmanned Aerial Vehicles, Editorial Springer (2007). Figura 3. Esquema controlador, modelo no lineal, referencia. [5] Salmerón- Quiroz B.B., J. Fermi Guerrero-Castellanos, H. Rodríguez Cortés, W. F. Guerrero-Sánchez. Towards attitude stabilization of pico and micro-satellites using bounded control (2011). La figura 4 muestra la gráfica de la respuesta del sistema, puede observarse que al término de los 3 segundos de simulación la señal correspondiente al sistema no lineal se empalma al sistema de referencia. [6] Salmerón-Quiroz, B.B., Guerrero-Castellanos, Design and implementation of an Attitude and Heading Reference System (AHRS), IEE Electrical Engineering Computing Science and Automatic Control (2011). [7] Guerrero-Castellanos, J.F.; Madrigal-Sastre, H.; GuerreroSanchez, W.F.; Salmeron-Quiroz, B.B.;, A robust nonlinear observer for rigid body attitude estimation, Electrical Engineering Computing Science and Automatic Control (2010). [8] Zhaohui Cen, Hassan Noura, Tri BagusSusilo, Younes Al Younes ,Robust Fault Diagnosis for Quadrotor UAVs Using Adaptive Thau Observer, (2013). [9] Gregor Franz, Actuator fault detection, diagnosis and faulttolerant control of a quadrotorUAV(2013). Figura 4. Respuesta sistema no lineal. [10] Salvador Antonio Rodríguez Paredes, Análisis estructural de un modelo de helicóptero, Tesis de maestría CINVESTAV IPN (1999). [11] Van der Schaft AJ. L2-Gain and Passivity Techniques in Nonlinear Control, Springer-Verlag (1999). III. CONCLUSIONES En este artículo se presentó un análisis del sistema no lineal correspondiente al helicóptero tándem, se propuso un cambio de variable adecuado que permite desacoplar las ecuaciones del modelo matemático. Se realizó un análisis del sistema desacoplado donde se concluyó que el sistema puede lienalizarse de manera exacta, sin embargo el sistema en el espacio del error es lineal por lo que se diseño un controlador y se implementó en el sistema no lineal, el cual permite seguir una trayectoria deseada. México D.F., 19 al 23 de octubre 2015 [12] Ortega R., Arjan J. S. Mareels I, and MaschB.Putting Energy Back in Control. IEEE Control System Magazine, p.p 18-33, (2001). [13] Quanser User Manual Q3/Q4/Q8. [14] Quanser User Manual QUARC Installation Manual. [15] Kahilil H. K.Nonlinear Systems, Prentice Hall (2002). 5 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. MEC-05 ARTÍCULO: ACEPTADO POR REFEREO [16] Alberto Isidori.Nonlinear Controls Systems, Springer 3a edición (1995). Instituto Politécnico Nacional (IPN), en 1996, el grado de Maestría en Ciencias Ingeniería Eléctrica en la especialidad en Control Automático por el Centro de Investigación y Estudios Avanzados (CINVESTAV-IPN), en 1998 y el Doctorado en Automática y Prodúctica por parte del Laboratorio de Automatización del Instituto Politécnico de Grenoble (INPG), Francia, en 2003. Sus áreas de interés incluyen investigación sobre la estabilidad y la pasividad de sistemas con parámetros concentrados y distribuidos, teoría y aplicaciones, análisis bajo los enfoques de Lyapunov, Lagrangianos, Hamiltonianos y retardos. [17] Horacio J. Marquez. Nonlinear Control Systems, WileyInterscience (2003). [18] Jing Zhou, ChangyunWen.AdaptiveBackstepping Control of Uncertain Systems, Springer (2008). [19]A. Mokhtari, A.; Benallegue. Dynamic feedback controller of euler angles and wind parameters estimation for a quadrotor unmanned aerial vehicle,ICRA ’04. IEEE International Conference, vol. 3, pp. 2359–2366, April 2004. Bernardino Benito Salmerón García recibió el título de Ingeniero en Robótica Industrial por parte de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Azcapotzalco del Instituto Politécnico Nacional (IPN), en 1998, el grado de Maestría en Control – Automatización Institut Polytechnique de Grenoble-Francia , en 2002 y el Doctorado en Automatique – Productique por parte de la Université Joseph Fourier – GIPSA-lab-Grenoble Francia , en 2007. Es profesor adscrito en Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Azcapotzalco. Sus áreas de interés incluyen investigación sobre el diseño y construcción de vehículos aéreos no tripulados y análisis de sistemas robóticos por medio de quaterniones. [20] KokotovicP.V.The joy of feedback nonlinear adaptative,IEEE control systems magazine (1992). [21] Gareth D. Pad.eld.Helicopter flight dynamics, Editorial Blackwell Publishing 2a edición (2007). [22] John R. Montgomery.Sikorsky helicopter flight theory for pilots and mechanics, Editorial Sikorsky Aircraft, Division of United Technologies, U.S.A. 1964. [23] Bramwell A. R. S.Helicopter Dynamics, Edward Arnold, London (1976). Jesús Martínez Martínez recibió el título de Ingeniero en Robótica Industrial por parte de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Azcapotzalco del Instituto Politécnico Nacional (IPN), en 2009, el grado de Maestría en Ingeniería de Manufactura en el área de Robótica y Control, en la Sección e Estudios de Posgrado e Investigación de la ESIME Unidad Azcapotzalco, en 2013. Actualmente se encuentra realizando el Doctorado en la misma institución. Sus áreas de interés incluyen sincronización, control lineal y no lineal de sistemas, observadores y sistemas robóticos. [24] KuceraV.Analysis and Design of Discrete Linear Control Systems, Editorial Prentice Hall(1991). [25] KuceraV.Analysis and Design of Discrete Linear Control Systems, Editorial Prentice Hall(1991). [26] V.I. Arnold.Mathematical Methods of Classical Mechanics, Springer-Verlag (1989). [27] John J. Craig.Introduction to Robotics: Mechanics and Control, Editorial Pearson/Prentice Hall, (2005). 28] Ashfaq Ahmad Mian, Wang Daobo.Modeling and Backsteppingbased Nonlinear Control Strategy for a 6 DOF Quadrotor Helicopter, Elsevier Ltd (2008). 29]Jing-Jing Xiongn, En-HuiZheng. Position and attitude tracking control for a quadrotor UAV, Elsevier Ltd (2014) VI. BIOGRAFÍA Jorge Guillermo Alonso Alfaro nació en 1982. Cursó Ingeniería Electromecánica en el Instituto Tecnológico de Toluca de 2001 a 2006. Cursó la Maestría en Ingeniería de Manufactura en la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica del IPN, de 2012 a 2014, actualmente cursa el Doctorado en Ingeniería de Sistemas Robóticos y Mecatrónicos desde el 2015 en la misma institución, donde su trabajo de investigación está enfocado al control e instrumentación de UAV´s, los Sistemas Robóticos y Mecatrónicos, así como el control de los mismos. Salvador Antonio Rodríguez Paredes recibió el título de Ingeniero en Comunicaciones y Electrónica por parte de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME)Unidad Zacatenco del México D.F., 19 al 23 de octubre 2015 6

© Copyright 2026