
Métodos para resolver integrales: Leibniz vs Fubini vs Cambio de
1
Métodos para resolver integrales:
Leibniz vs Fubini vs Cambio de Variable
Alejandra – Quintero García
Resumen
Las integrales y derivadas son muy útiles para resolver casi todos los problemas de la física, ya
que estos se modelan con ecuaciones que en su mayoría son ecuaciones integro-diferenciales.
Algunos de estos modelos se observan en las ondas electromagnéticas, en el cálculo de la carga
total, el calor, el movimiento, o hallar un área entre curvas. Por lo cual, y en base a la importancia
que tiene el saber resolver una integral, es también muy importante conocer diferentes métodos
y/o teoremas que nos ayudan a resolver de una manera más sencilla las integrales, para esto se
explica el Teorema de Leibniz, el Teorema de Fubini y el Teorema de Cambio de Variable
haciendo énfasis en este último en el Jacobiano. También se muestran ejemplos del cómo se
emplean dichos Teoremas.
Palabras Claves: Fubini, Leibniz, Cambio de Variable, Integrales, Jacobiano.
Metodología
Existen diferentes formas de resolver una integral dependiendo de la forma de la función a
integrar, a continuación se presentan algunas formas de realizar una integral dependiendo la
forma del integrando.
Por ejemplo, el método de sustitución se realiza de la siguiente manera: si 𝑢 = 𝑔(𝑥) es una
función diferenciable cuyo rango es un intervalo 𝐼 y 𝑓(𝑥) es continua en 𝐼, entonces
∫ 𝑓(𝑔(𝑥))𝑔′ (𝑥)𝑑𝑥 = ∫ 𝑓(𝑢)𝑑𝑢
después de realizar la integral se sustituye 𝑢 por 𝑔(𝑥) para expresar la respuesta final en términos
de 𝑥.
Otra forma de resolver integrales es por integración por partes. Este método se utiliza cuando
la función a integrar se puede expresar como un producto de una función por la derivada de otra
∫ 𝑓(𝑥)𝑔´(𝑥)𝑑𝑥 = 𝑓(𝑥)𝑔(𝑥) + ∫ 𝑓 ′ (𝑥)𝑔(𝑥)𝑑𝑥
Cuando la función tiene la forma 𝑠𝑒𝑛𝑚 (𝑥)𝑐𝑜𝑠 𝑛 (𝑥), por ejemplo, entonces se le llama Potencias
trigonométricas la manera de resolverla depende si 𝑚 es impar, si 𝑛 es impar o si 𝑚 y 𝑛 son par, o
si tiene la forma 𝑠𝑒𝑐 𝑚 (𝑥)𝑡𝑎𝑛𝑛 (𝑥), la manera de resolverla dependen si 𝑚 es par, si 𝑛 es impar, o
de no presentarse ninguno de los casos anteriores entonces se intenta convertir en senos y
cosenos.
También se puede resolver por sustituciones trigonométricas, esta se utiliza cuando el
integrando tiene la forma √𝑎2 − 𝑢2 , √𝑎2 + 𝑢 2 ó √𝑢2 − 𝑎2 , estas pueden estar elevadas a
diferentes potencias.
Integración de funciones racionales utilizando fracciones parciales, donde el integrando tiene la
𝑓(𝑥)
forma
donde f(x) y g(x) son polinomios, se obtienen las fracciones y se integra dependiendo la
𝑔(𝑥)
forma de la fracción.
Conclusiones:
El realizar un proceso más corto para calcular o bien resolver una integral nos lleva a tener
seguridad en que dicho proceso es correcto, aunque siempre existe la posibilidad de algún error,
pero al realizar menos operaciones esta posibilidad disminuye. Por ello es útil conocer los
diferentes métodos y Teoremas que existen para calcular una integral.
Originalidad: Se presentan tres resultados importantes que facilitad el cálculo de integrales.
2
INTRODUCCIÓN
Las integrales y derivadas son muy útiles para resolver casi todos los problemas de la física, ya
que estos se modelan con ecuaciones que en su mayoría son integro-diferenciales. Para ello
existen diversos métodos para encontrar el resultado de una integral.
Como se sabe el operador que se utiliza para denotar una integral es ∫ , esta notación fue
creada por Leibniz. En sus primeros escritos, Leibniz utilizó la notación “omn” (abreviatura del
vocablo latino “omnes”) para denotar la integración. Después, en octubre de 1675, escribió: “será
útil escribir ∫, en lugar de omn. y por lo tanto, ∫ 𝑙 en vez de omn…”. Dos o tres semanas más
tarde refinó aún más la notación y escribió ∫[ ]𝑑𝑥 en vez del símbolo ∫ solo. También Leibniz
desarrollo la Regla de derivación, de la cual se mostrará más adelante su aplicación.
𝑏
La dificultad para evaluar una integral simple ∫𝑎 𝑓(𝑥)𝑑𝑥 depende normalmente de la función 𝑓,
y no del intervalo [𝑎, 𝑏]. Ésta es una diferencia importante entre las integrales simples y las
integrales dobles, debido a que después de evaluar la primera integral se puede obtener un
integrando muy complejo de integrar.
El Teorema de Fubini lo demostró el matemático italiano Guido Fubini (1879-1943). El Teorema
establece que si 𝑅 es vertical u horizontal simple y 𝑓 es continua en 𝑅, la integral doble de 𝑓 en 𝑅
es igual a una integral iterada.
Algunas integrales dobles son mucho más fáciles de evaluar en forma polar que en forma
rectangular, esto es así especialmente cuando se trata de regiones circulares, cardioides y de
integrandos que contienen 𝑥 2 + 𝑦 2 , y este cambio de coordenadas se puede realizar gracias al
Teorema de Cambio de variables, donde utilizamos el Jacobiano, llamado así en honor al
matemático alemán Carl Gustav Jacob Jacobi quien realizó el primer estudio serio del cambio de
variables en integrales múltiples a mediados del siglo XIX.
INTEGRAL
La integral o también conocida como antiderivada es la función que resulta del proceso inverso de
la derivación, es decir, consiste en encontrar una función que, al ser derivada produce la función
dada. La antiderivada también se conoce como la primitiva o la integral indefinida.
Como se sabe la derivada de cualquier función constante es cero, así pues, una vez que se ha
encontrado una primitiva 𝐹, sumándole o restándole una constante 𝐶 se obtiene otra primitiva,
porque (𝐹 + 𝐶) ′ = 𝐹 ′ + 𝐶 ′ = 𝐹′. La constante es una manera de expresar que cada función tiene
un número infinito de primitivas diferentes.
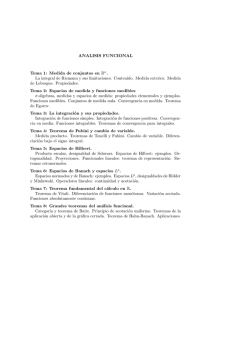
Por ejemplo, supóngase que se quiere encontrar las primitivas de 2𝑥. Una de estas primitivas
es 𝑥 2 , otra es 𝑥 2 + 1, una tercera es 𝑥 2 + 2, y en general 𝑥 2 + 𝐶. Cada una de estas funciones
tiene por derivada 2𝑥. Resulta que añadir y restar constantes es el único grado de libertad que hay
al encontrar primitivas diferentes de la misma función (ver figura 1). Es decir, todas las primitivas
son las mismas con la diferencia de una constante, así pues se tiene que,
3
Figura 1.-Grafica de la función primitiva con diferentes valores de c.
INTEGRAL DEFINIDA
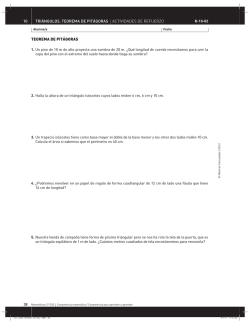
Dada una función 𝑓(𝑥) de una variable real 𝑥 y un intervalo [𝑎, 𝑏] de la recta real, la integral
definida es igual al área limitada entre la gráfica de 𝑓(𝑥), y las líneas verticales 𝑥 = 𝑎 y 𝑥 = 𝑏.
Tomando como ejemplo la función anterior 𝑓(𝑥) = 2𝑥, la integral dfinida en el intervalo [𝑎, 𝑏] es
el área representada de color azul en la figura 2.
Figura 2.- Representación del área bajo la curva de la función 𝑓(𝑥) = 2𝑥 en el intervalo [𝑎, 𝑏].
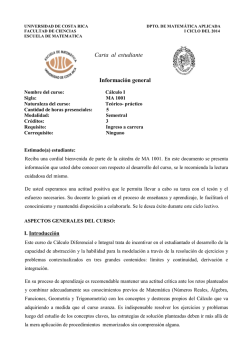
VOLUMEN BAJO LA SUPERFICIE
Se requiere determinar el volumen contenido entre la superficie 𝑓(𝑥, 𝑦) y el plano 𝑥𝑦, donde la
región transversal del solido está definido por la región 𝑅 (en este caso un rectángulo en ℝ2 );
como se muestra en la figura 3.
Si se utiliza como base rectángulos más pequeños de dimensiones ∆𝑥𝑖 y ∆𝑦𝑖 , donde
∆𝑥𝑖 = 𝑥𝑖 − 𝑥𝑖−1 , ∆𝑦𝑗 = 𝑦𝑗 − 𝑦𝑗−1 ,
y 𝑥𝑖 , 𝑦𝑗 es una partición de 𝑅, tal que
𝑎 = 𝑥0 < 𝑥1 < 𝑥2 < ⋯ < 𝑥𝑛 = 𝑏,
𝑐 = 𝑦0 < 𝑦1 < 𝑦2 < ⋯ < 𝑦𝑚 = 𝑑,
Lo anterior se muestra gráficamente en la figura 4.
4
Figura 3.- Área bajo la superficie.
Figura 4.- Superficie.
Entonces, una aproximación al volumen bajo la superficie es
𝑉 ≈ ∑𝑛𝑖=𝑗 ∑𝑚
𝑗=1 𝑓(𝑥𝑖 , 𝑦𝑗 ) ∆𝑥𝑖 ∆𝑦𝑖 ,
si 𝑛, 𝑚 → ∞ ∆𝑥𝑖 , ∆𝑦𝑖 → 0 si ∆𝑥 = 𝑚á𝑥{∆𝑥𝑖 }, ∆𝑦 = 𝑚á𝑥{∆𝑦𝑗 } → 0
𝑉 = lim∆𝑥→0 ∑𝑛𝑖=𝑗 ∑𝑚
𝑗=1 𝑓(𝑥𝑖 , 𝑦𝑗 ) ∆𝑥𝑖 ∆𝑦𝑖 ,
. ∆𝑦→0
= ∬ 𝑓(𝑥, 𝑦)𝑑𝐴
𝑅
donde 𝑑𝐴 = 𝑑𝑥𝑑𝑦 ó 𝑑𝐴 = 𝑑𝑦𝑑𝑥 es llamado diferencial de área.
Ejemplo: Determinar el volumen del solido que se encuentra bajo 𝑧 = 1 + 𝑥 2 + 𝑦 2 y el plano 𝑥𝑦,
y que está acotado por 𝑥 = 0, 𝑥 = 1, 𝑦 = −1 y 𝑦 = 1.
Solución.
1
1
∫ ∫ 1 + 𝑥 2 + 𝑦 2 𝑑𝑦𝑑𝑥
0
−1
1
1
1
= ∫ [(1 + 𝑥 2 )𝑦 + 𝑦 3 ] 𝑑𝑥
3
−1
0
1
1
8
8
2
10
= ∫ ( + 2𝑥 2 ) 𝑑𝑥 = [ 𝑥 + 𝑥 3 ] =
3
3
3
3
0
0
REGLA DE DERIVACIÓN DE LEIBNIZ
En las aplicaciones, algunas veces se encuentran funciones como
𝑥2
𝑓(𝑥) = ∫
𝑠𝑒𝑛𝑥
2√𝑥
(1 + 𝑡)𝑑𝑡
y
𝑔(𝑥) = ∫
𝑠𝑒𝑛𝑡 2 𝑑𝑡,
√𝑥
definidas por integrales que al mismo tiempo tienen una variable en los límites superiores de
integración y una variable en los límites inferiores de integración. La primera integral puede
evaluarse directamente, pero la segunda no. Sin embargo, obtendremos la derivada de cualquier
integral usando la fórmula llamada Regla de Leibniz.
5
Regla de Leibniz. Si 𝑓 es continua en [𝑎, 𝑏] y si 𝑢(𝑥) y 𝑣(𝑥) son funciones diferenciables de 𝑥,
cuyos valores están en [𝑎, 𝑏], entonces
𝑑 𝑣(𝑥)
𝑑𝑣
𝑑𝑢
∫
𝑓(𝑡)𝑑𝑡 = 𝑓(𝑣(𝑥))
− 𝑓(𝑢(𝑥))
𝑑𝑥 𝑢(𝑥)
𝑑𝑥
𝑑𝑥
La figura 5 da una interpretación geométrica de la regla de Leibniz. En ella se muestra una
alfombra de ancho variable 𝑓(𝑡), que se enrolla a la izquierdad al mismo tiempo que 𝑥 se
desenrolla a la derecha. (En esta interpretación, el tiempo es 𝑥). En el instante 𝑥, el suelo está
𝑑𝑢
cubierto desde 𝑢(𝑥) hasta 𝑣(𝑥). La tasa
a la que la alfombra se está enrollando no debe ser la
misma que la tasa
𝑑𝑣
𝑑𝑥
𝑑𝑥
en la que se está desenrollando.
En cualquier tiempo dado 𝑥, el área cubierta por la alfombra es
𝑣(𝑥)
𝐴(𝑥) = ∫
𝑓(𝑡)𝑑𝑡
𝑢(𝑥)
Figura 5.- Interpretación Geométrica.
Corolario (Regla de Derivación de Leibniz). Sean 𝐼, 𝐽 intervalos no triviales, con 𝐼 compacto y
𝐽 abierto. Sea 𝑓: 𝐼 × 𝐽 → ℝ una función continua en 𝐼 × 𝐽 tal que 𝑓(𝑥) es derivable en 𝐽 para todo
𝜕𝑓
𝑥 ∈ 𝐼. Supongase además que
es continua en 𝐼 × 𝐽. Sea 𝑡0 𝜖 𝐼 y 𝑔: 𝐽 → 𝐼 una función derivable.
𝜕𝜆
Entonces,
𝜕𝑓
∫𝑡
𝜕𝜆
(∙, 𝜆) es integrable para todo 𝜆 ∈ 𝐽,
𝑔(𝜆)
0
𝑓(𝑥, 𝜆)𝑑𝑥 es derivable en 𝐽 para todo 𝑥 ∈ 𝐼,
y se cumple la regla de derivación de Leibniz
𝑔(𝜆)
𝑑 𝑔(𝜆)
𝜕𝑓
(𝑥, 𝜆)𝑑𝑥
∫ 𝑓(𝑥, 𝜆)𝑑𝑥 = 𝑓(𝑔(𝜆), 𝜆)𝑔′ (𝜆) + ∫
𝑑𝜆 𝑡0
𝜕𝜆
𝑡0
∀𝜆 ∈ 𝐽
La aplicación de este y de los demás teoremas se mostrara más adelante.
6
TEOREMA DE FUBINI
El Teorema de Fubini da una técnica para el cálculo de integrales de funciones de varias variables
mediante el cálculo de varias integrales de funciones de una variable.
Teorema (Fubini). Sea 𝑓 continua en una región plana 𝑅.
1. Si 𝑅 está definida por 𝑎 ≤ 𝑥 ≤ 𝑏 y 𝑔1 (𝑥) ≤ 𝑦 ≤ 𝑔2 (𝑥), donde 𝑔1 y 𝑔2 son continuas en
[𝑎, 𝑏], entonces (ver figura 6)
𝑏
𝑔2 (𝑥)
∬ 𝑓(𝑥, 𝑦)𝑑𝐴 = ∫ ∫
𝑅
𝑎
𝑓(𝑥, 𝑦)𝑑𝑦𝑑𝑥
𝑔1 (𝑥)
2. Si 𝑅 está definida por 𝑐 ≤ 𝑦 ≤ 𝑑 y ℎ1 (𝑦) ≤ 𝑥 ≤ ℎ2 (𝑦), donde ℎ1 y ℎ2 son continuas en
[𝑐, 𝑑], entonces (ver figura 7)
𝑑
ℎ2 (𝑦)
∬ 𝑓(𝑥, 𝑦)𝑑𝐴 = ∫ ∫
𝑅
Figura 6.- Región 𝑅 del Teorema Fubini 1.
𝑐
𝑓(𝑥, 𝑦)𝑑𝑥𝑑𝑦
ℎ1 (𝑦)
Figura 7.- Región 𝑅 del Teorema Fubini 2.
TEOREMA DE CAMBIO DE VARIABLE
Cuando se quiere resolver una integral y se tiene un gran número de operaciones, esto puede
conducir a un resultado erróneo, para evitar este tipo de problemas se puede utilizar el Teorema
de Cambio de Variable.
Antes de enunciar el Teorema, es necesario ver el concepto de Jacobiano, ya que es un
concepto importante en el cambio de variable.
Definición (Jacobiano en dos variables). Supóngase que 𝑥 y 𝑦 son dos variables
independientes que se pueden expresar en términos de otras dos variables independientes 𝑢 y 𝑣
por la fórmula 𝑥 = 𝑔(𝑢, 𝑣) y 𝑦 = ℎ(𝑢, 𝑣). El Jacobiano de 𝑥 y 𝑦 con respecto a 𝑢 y 𝑣, denotado
𝜕(𝑥,𝑦)
ó 𝐽(𝑢, 𝑣), es
𝜕(𝑢,𝑣)
𝜕𝑥
𝐽(𝑢, 𝑣) = |𝜕𝑢
𝜕𝑦
𝜕𝑢
𝜕𝑥
𝜕𝑣 | = 𝜕𝑥 𝜕𝑦 − 𝜕𝑦 𝜕𝑥
𝜕𝑦
𝜕𝑢 𝜕𝑣 𝜕𝑢 𝜕𝑣
𝜕𝑣
7
Definición (Jacobiano en tres variables). Supóngase que 𝑥, 𝑦 y 𝑧 son tres variables
independientes que se pueden expresar en términos de otras tres variables independientes 𝑢, 𝑣 y
𝑤 por la fórmula 𝑥 = 𝑔(𝑢, 𝑣, 𝑤), 𝑦 = ℎ(𝑢, 𝑣, 𝑤) y 𝑧 = 𝑙(𝑢, 𝑣, 𝑤). El Jacobiano de 𝑥, 𝑦 y 𝑧 con
𝜕(𝑥,𝑦,𝑧)
respecto a 𝑢, 𝑣 y 𝑤, denotado
ó 𝐽(𝑢, 𝑣, 𝑤), es
𝜕(𝑢,𝑣,𝑤)
𝜕𝑥
𝜕𝑢
|
𝜕𝑦
𝐽(𝑢, 𝑣, 𝑤) =
𝜕𝑢
|
𝜕𝑧
𝜕𝑢
𝜕𝑥
𝜕𝑣
𝜕𝑦
𝜕𝑣
𝜕𝑧
𝜕𝑣
𝜕𝑥
𝜕𝑤
|
𝜕𝑦
𝜕𝑤 |
𝜕𝑧
𝜕𝑤
Teorema (Cambio de Variable ℝ𝟐 ). Si 𝑓(𝑥, 𝑦) es continua en R, R ⊆ ℝ2 y existen relaciones
uno a uno entre las variables 𝑢, 𝑣 y 𝑥, 𝑦, es decir
𝑢 = 𝐺(𝑥, 𝑦),
𝑣 = 𝐻(𝑥, 𝑦)
de manera que es posible escribir
𝑥 = 𝑔(𝑢, 𝑣),
𝑦 = ℎ(𝑢, 𝑣)
Si 𝑓 es continua en una región R 𝑢,𝑣 ⊆ ℝ2 , entonces
∬ 𝑓(𝑥, 𝑦)𝑑𝐴𝑥,𝑦 = ∬ 𝑓(𝑔(𝑢, 𝑣), ℎ(𝑢, 𝑣))| 𝐽(𝑢, 𝑣)|𝑑𝐴𝑢,𝑣
𝑅𝑥,𝑦
𝑅𝑢,𝑣
Una explicación de lo que se hace cuando se aplica el Teorema de Cambio de Variables es: si
se denota como 𝑅 a una región en el plano 𝑥𝑦 y a 𝑆 una región en el plano 𝑢𝑣, entonces un
cambio de variable se describe como una transformación 𝑇 del plano 𝑢𝑣 al plano 𝑥𝑦 definida como
𝑇(𝑢, 𝑣) = (𝑥, 𝑦) donde 𝑥 y 𝑦 están dados por 𝑥 = 𝑔(𝑢, 𝑣) y 𝑦 = ℎ(𝑢, 𝑣). Tal transformación trazara
un mapeo de una región S en el plano 𝑢𝑣 en otra región R en el plano 𝑥𝑦 (ver figura 8). En la
mayoría de los casos se da la región 𝑅 y entonces hay que buscar una región 𝑆 donde la región a
integrar sea más sencilla y por lo cual se usa una transformación.
Figura 8.- Mapeo de una región a otra mediante una transformación.
8
Teorema (Cambio de Variable ℝ𝟑 ). Si 𝑓(𝑥, 𝑦, 𝑧) es continua en R, R ⊆ ℝ3 y existen relaciones
uno a uno entre las variables 𝑢, 𝑣, 𝑤 y 𝑥, 𝑦, 𝑧, es decir
𝑢 = 𝐺(𝑥, 𝑦, 𝑧),
𝑣 = 𝐻(𝑥, 𝑦, 𝑧),
𝑤 = 𝐾(𝑥, 𝑦, 𝑧),
𝑦 = ℎ(𝑢, 𝑣, 𝑤).
𝑧 = 𝑘(𝑢, 𝑣, 𝑤)
de manera que es posible escribir
𝑥 = 𝑔(𝑢, 𝑣, 𝑤),
Si 𝑓 es continua en una región R 𝑢,𝑣,𝑤 ⊆ ℝ3 , entonces
∬ 𝑓(𝑥, 𝑦, 𝑧)𝑑𝐴𝑥,𝑦,𝑧 = ∬ 𝑓(𝑔(𝑢, 𝑣, 𝑤), ℎ(𝑢, 𝑣, 𝑤), 𝑘(𝑢, 𝑣, 𝑤))| 𝐽(𝑢, 𝑣, 𝑤)|𝑑𝐴𝑢,𝑣,𝑤
𝑅𝑥,𝑦,𝑧
𝑅𝑢,𝑣,𝑤
EJEMPLOS DE APLICACIÓN
Para poder comprender y entender cómo se aplican los resultados anteriores, veamos ejemplos
de la aplicación de estos.
Ejemplo 1. Evaluar
1
1
∬ (1 − 𝑥 2 − 𝑦 2 ) 𝑑𝐴
2
2
𝑅
donde 𝑅 es la región dada por 0 ≤ 𝑥 ≤ 1, 0 ≤ 𝑦 ≤ 1.
Solución. Utilizando el Teorema de Fubini, como la región 𝑅 es un cuadrado, es vertical y
horizontal simple y se puede emplear cualquier orden de integración; se elige 𝑑𝑦𝑑𝑥 colocando un
rectángulo representativo vertical en la región, como se muestra en la figura 9. Con esto se
obtiene lo siguiente.
Figura 9.- Rectángulo representativo vertical en la región de integración.
1
1
∬ (1 − 𝑥 2 − 𝑦 2 ) 𝑑𝐴
2
2
𝑅
1 1
1
1
= ∫ ∫ (1 − 𝑥 2 − 𝑦 2 ) 𝑑𝑦𝑑𝑥
2
2
0 0
1
1
1
1
= ∫ [(1 − 𝑥 2 ) 𝑦 − 𝑦 3 ] 𝑑𝑥
2
6
0
0
1
5 1
= ∫ ( − 𝑥 2 ) 𝑑𝑥
2
0 6
1
5
1
2
= [ 𝑥 − 𝑥 3] =
6
6
3
0
9
Ejemplo 2. Evaluar la siguiente integral si 𝑅 es la región mostrada en la figura 10
∬
𝑅
1
√𝑥 2
+ 𝑦2
𝑑𝐴
Figura 10.- Región a integrar.
Solución. Primero se aplica el Teorema de Fubini, entonces se tiene
1
√1−𝑥 2
∫ ∫
1
√𝑥 2 + 𝑦 2
−1 0
𝑑𝑦𝑑𝑥
Ahora se aplica el Teorema de Cambio de Variable haciendo el cambio de coordenadas a
coordenadas polares.
𝑥 = 𝑟𝑐𝑜𝑠𝜃
𝑟=
√𝑥 2
+
𝑦 = 𝑟𝑠𝑒𝑛𝜃
𝑦
𝜃 = arctan ( )
𝑥
𝑦2
Se obtiene el Jacobiano de la transformación:
𝜕𝑥
𝐽(𝑟, 𝜃) = |𝜕𝑟
𝜕𝑦
𝜕𝑟
𝜕𝑥
𝜕𝜃 | = | 𝑐𝑜𝑠𝜃
𝜕𝑦
𝑠𝑒𝑛𝜃
𝜕𝜃
−𝑟𝑠𝑒𝑛𝜃
| = 𝑟𝑐𝑜𝑠 2 𝜃 + 𝑟𝑠𝑒𝑛2 𝜃 = 𝑟
𝑟𝑐𝑜𝑠𝜃
e integrando,
1
√1−𝑥 2
∫ ∫
−1 0
1
√𝑥 2 + 𝑦 2
1
𝑑𝑦𝑑𝑥
𝜋
=∫ ∫
0
1
0
1
𝑟 𝑑𝜃𝑑𝑟
𝑟
𝜋
= ∫ ∫ 1 𝑑𝜃𝑑𝑟
0 0
1
= ∫ [𝜃]𝜋0 𝑑𝑟
0
1
= ∫ 𝜋𝑑𝑟 = [𝜋𝑟]10 = 𝜋
0
10
Las figuras 11 y 12, la parte de color azul muestran el área bajo la superficie, en coordenadas
cartesianas y polares respectivamente, que acabamos de obtener. Cabe notar que en ambas el
área bajo la superficie es la misma.
Figura 11.
Figura 12.
Área bajo la superficie (coordenadas Cartesianas)
Área bajo la superficie (coordenadas Polares)
Ejemplo 3. Utilizando el Corolario de la Regla de Leibniz encontrar las derivadas de la función
𝑥2
𝐹(𝑥) = ∫ √𝑡 4 + 𝑥 3 𝑑𝑡
0
Solución. Antes de aplicar directamente la Regla de Leibniz, se localiza cada parte de la integral
de acuerdo a dicha Regla, esto es
𝑔(𝑥) = 𝑥 2 𝑦 𝑓(𝑡, 𝑥) = √𝑡 4 + 𝑥 3
𝑓(𝑥 2 , 𝑥) = √𝑥 4 + 𝑥 3 = 𝑥 √𝑥 2 + 𝑥,
𝑔′ (𝑥) = 2𝑥
𝑦
𝑓𝑥 (𝑡, 𝑥) =
3𝑥 2
2√𝑡 4 + 𝑥 3
Aplicando la Regla de derivación de Leibniz
2
𝑔(𝑥)
𝑥
𝑑𝐹
3𝑥 2
= 𝑓(𝑥 2 , 𝑥)𝑔′ (𝑥) + ∫ 𝑓𝑥 (𝑡, 𝑥)𝑑𝑡 = (𝑥 √𝑥 2 + 𝑥) (2𝑥) + ∫
𝑑𝑡
4
3
𝑑𝑥
0
0 2√𝑡 + 𝑥
Ejemplo 4. Utilice la regla de Leibniz para encontrar la derivada de la función
𝑥
1
𝑑𝑡
1/𝑥 𝑡
𝑓(𝑥) = ∫
Solución. Analizando las partes para poder aplicar la Regla de derivación de Leibniz
𝑣(𝑥) = 𝑥, 𝑢(𝑥) =
𝑑𝑣
= 1,
𝑑𝑥
1
𝑓(𝑣(𝑥)) = ,
𝑥
1
,
𝑥
1
𝑓(𝑡) = ,
𝑡
𝑑𝑢
1
= − 2,
𝑑𝑥
𝑥
𝑓(𝑢(𝑥)) =
1
= 𝑥,
1
𝑥
11
Ahora sí, aplicando la regla de Leibniz
𝑑 𝑥 1
1
1
1 1 2
∫
𝑑𝑡 = ( ) (1) − (𝑥) (− 2 ) = + =
𝑑𝑥 1/𝑥 𝑡
𝑥
𝑥
𝑥 𝑥 𝑥
CONCLUSIONES
El realizar un proceso más directo para calcular o bien resolver una integral nos lleva a tener
seguridad en que dicho proceso es correcto, aunque siempre existe la posibilidad de algún error,
pero al realizar menos operaciones esta posibilidad disminuye. En la actualidad existen diversos
softwares que nos ayudan a calcular integrales por ejemplo Máxima, Matlab, Maple; pero hay
casos donde estos no nos pueden ayudar por ejemplo en integrales donde se aplica el Teorema
de Leibniz, por lo cual es importante que se difunda este Teorema ya que existe muy poca
información sobre él, y en algunos textos solo se toma como un tema de discusión y en otros ni
siquiera se encuentra.
BIBLIOGRAFIA
Larson, R., Hostetler, R. P., & Edwards, B. H. (2006). Cálculo de varias variables II.
Lax, P. (2005). Change of variables in multiple integrals. Selected Papers Volumen II.
Rincón, J. A. C. Derivación bajo la integral.
Rudin, W. (1976). Principles of Mathematical Analysis. McGraw-Hill. USA.
Spivak, M.D. (1988). Cálculo en Variedades. Reverté.
Thomas, G. B., Weir, M. D., Hass, J., & Giordano, F. R. (2005). Cálculo: una variable (Vol. 1).
Pearson Educación.


© Copyright 2026