
Proyecto docente
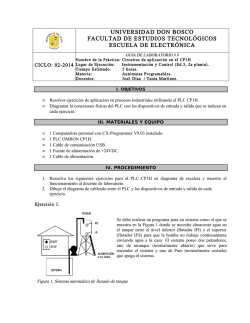
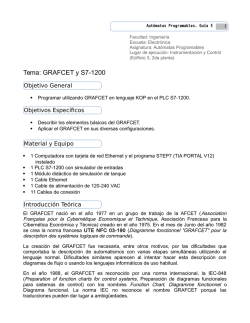
Proyecto docente Oferta sin docencia (a extinguir) Plan 214 Ing.Tec.Ind. Esp en Electricidad Asignatura 16332 AUTOMATISMOS ELECTRICOS Grupo 1 Presentación Programa Básico Objetivos Control de procesos discretos por medio de autómatas programables. Arquitectura, ciclo de control y configuración de los autómatas programables. Programación de un autómata. Programa de Teoría PARTE I: (nociones generales) 1. INTRODUCCIÓN AL CONTROL INDUSTRIAL. Automatismos analógicos y digitales. Lógica cableada y programable. El autómata programable. Control por ordenador. 2. DISEÑO DE AUTOMATISMOS LÓGICOS. Lenguaje de relés. Diseño de automatismos combinacionales. Diseño de automatismos secuenciales. GRAFCET. 3. EL AUTÓMATA PROGRAMABLE: ARQUITECTURA INTERNA. Bloques esenciales, CPU, memorias, interfaces, fuentes de alimentación. 4. CICLO DE FUNCIONAMIENTO DEL AUTÓMATA Y CONTROL EN TIEMPO REAL. Tiempo de ejecución del ciclo del autómata. Elementos de proceso rápido. 5. CONFIGURACIÓN DEL AUTÓMATA. Tipos de procesadores. Tipos de unidades de control. Configuración de las entradas y salidas. Memorias. 6. INTERFACES DE ENTRADA Y SALIDA. Entradas lógicas de CC y CA. Salidas lógicas a relé y a colector abierto. Entradas y salidas analógicas. 7. SENSORES Y ACTUADORES. Sensores de contacto, fuerza, velocidad, temperatura, presión. Actuadores neumáticos, hidráulicos y eléctricos. 8. REDES DE AUTÓMATAS. Comunicaciones digitales. Modelo de referencia OSI. Topología de las redes LAN. Nivel físico de la red, interfaces estándar, estructura lógica de las LAN. Redes de comunicación industriales. Buses de campo: MADBUS, BITBUS, PROFIBUS. PARTE II: (los autómatas CPM1 de OMRON y TSX nano de Telemecanique) 1. FUNCIONES DEL ÁREA DE MEMORIA DEL CPM1 OMRON. 2. PROGRAMACIÓN DEL ONROM CPM1 - (funciones lógicas, contadores y temporizadores, instrucciones de control de palabras, cálculo aritmético). 3. PROGRAMACIÓN DEL AUTÓMATA TSX nano (funciones lógicas, contadores y temporizadores, instrucciones de control de palabras, cálculo aritmético, funciones especiales). PRÁCTICAS DE LABORATORIO Programación de autómatas CPM1 de OMRON 1. Programación basada en GRAFCET (instalación de lavado de vehículos) 2. Uso de temporizadores (control de un semáforo) 3. Uso de contadores (Escalera mecánica) 4. Uso de bloques de desplazamiento (Coche fantástico) 5. Operaciones aritméticas. Programación de autómatas CPM1 de OMRON 1. Operaciones aritméticas 2. Programadores cíclicos. 3. Uso de subrutinas Programa Práctico Evaluación Se evaluarán: a) Examen escrito de teoría y problemas b) Memoria entregada por el alumno fruto de la realización de las prácticas de laboratorio. Página 1 de 3 Bibliografía Josep Balcells, José Luis Romeral. "Autómatas programables". Editorial Marcombo. Boireaux Editores. 1997. * J. Pedro Romera, J. Antonio Lorite, Sebastián Montoro. "Automatización, problemas resueltos de autómatas programables". Editorial Paraninfo. 1994. * "Autómatas Programables Industriales SYSMAC CPM1". Manual de Programación. OMRON, 1996. Presentación Programa Básico Objetivos Control de procesos discretos por medio de autómatas programables. Arquitectura, ciclo de control y configuración de los autómatas programables. Programación de un autómata. Programa de Teoría PARTE I: (nociones generales) 1. INTRODUCCIÓN AL CONTROL INDUSTRIAL. Automatismos analógicos y digitales. Lógica cableada y programable. El autómata programable. Control por ordenador. 2. DISEÑO DE AUTOMATISMOS LÓGICOS. Lenguaje de relés. Diseño de automatismos combinacionales. Diseño de automatismos secuenciales. GRAFCET. 3. EL AUTÓMATA PROGRAMABLE: ARQUITECTURA INTERNA. Bloques esenciales, CPU, memorias, interfaces, fuentes de alimentación. 4. CICLO DE FUNCIONAMIENTO DEL AUTÓMATA Y CONTROL EN TIEMPO REAL. Tiempo de ejecución del ciclo del autómata. Elementos de proceso rápido. 5. CONFIGURACIÓN DEL AUTÓMATA. Tipos de procesadores. Tipos de unidades de control. Configuración de las entradas y salidas. Memorias. 6. INTERFACES DE ENTRADA Y SALIDA. Entradas lógicas de CC y CA. Salidas lógicas a relé y a colector abierto. Entradas y salidas analógicas. 7. SENSORES Y ACTUADORES. Sensores de contacto, fuerza, velocidad, temperatura, presión. Actuadores neumáticos, hidráulicos y eléctricos. 8. REDES DE AUTÓMATAS. Comunicaciones digitales. Modelo de referencia OSI. Topología de las redes LAN. Nivel físico de la red, interfaces estándar, estructura lógica de las LAN. Redes de comunicación industriales. Buses de campo: MADBUS, BITBUS, PROFIBUS. PARTE II: (los autómatas CPM1 de OMRON y TSX nano de Telemecanique) 1. FUNCIONES DEL ÁREA DE MEMORIA DEL CPM1 OMRON. 2. PROGRAMACIÓN DEL ONROM CPM1 - (funciones lógicas, contadores y temporizadores, instrucciones de control de palabras, cálculo aritmético). 3. PROGRAMACIÓN DEL AUTÓMATA TSX nano (funciones lógicas, contadores y temporizadores, instrucciones de control de palabras, cálculo aritmético, funciones especiales). PRÁCTICAS DE LABORATORIO Programación de autómatas CPM1 de OMRON 1. Programación basada en GRAFCET (instalación de lavado de vehículos) 2. Uso de temporizadores (control de un semáforo) 3. Uso de contadores (Escalera mecánica) 4. Uso de bloques de desplazamiento (Coche fantástico) 5. Operaciones aritméticas. Programación de autómatas CPM1 de OMRON 1. Operaciones aritméticas 2. Programadores cíclicos. 3. Uso de subrutinas Programa Práctico Evaluación Se evaluarán: a) Examen escrito de teoría y problemas b) Memoria entregada por el alumno fruto de la realización de las prácticas de laboratorio. Bibliografía Josep Balcells, José Luis Romeral. "Autómatas programables". Editorial Marcombo. Boireaux Editores. 1997. * J. Pedro Romera, J. Antonio Lorite, Sebastián Montoro. "Automatización, problemas resueltos de autómatas programables". Editorial Paraninfo. 1994. * "Autómatas Programables Industriales SYSMAC CPM1". Manual de Programación. OMRON, 1996. Página 2 de 3 Página 3 de 3

© Copyright 2026