
¿Cómo medir un conjunto?
Cap´ıtulo 2
¿C´
omo medir un conjunto?
TEMARIO
Lecci´
on
Lecci´
on
Lecci´
on
Lecci´
on
Lecci´
on
2.1
2.2
2.3
2.4
2.5
La suma de Minkowski.
El volumen y el ´area de superficie. Los vol´
umenes intr´ınsecos.
Los vol´
umenes mixtos.
La desigualdad de Brunn-Minkowski y otras desigualdades.
Otras medidas geom´etricas. Problemas de optimizaci´on
a Teor´ıa de Brunn-Minkowski es el centro de la Geometr´ıa de los Cuerpos Convexos. Tuvo su
L
origen, como tal, en la Tesis de Hermann Brunn en 1887 y es, en su parte m´as esencial, creaci´
on
de Hermann Minkowski alrededor del cambio de siglo. Precisamente, el 10 de Diciembre de 1900,
Minkowski escribi´o a David Hilbert inform´andole de que su estudio sobre el ´area de superficie y
el volumen en R3 estaba completo, siendo su avance m´as importante la introducci´on de una idea
asociada a tres cuerpos convexos que ´el denomin´o, provisionalmente, sus vol´
umenes mixtos.
Si queremos definir brevemente la Teor´ıa de Brunn-Minkowski, podr´ıamos decir que ´esta es el
resultado de combinar y asociar dos nociones elementales para los conjuntos del espacio eucl´ıdeo:
la suma vectorial y el volumen. La suma vectorial o de Minkowski, combinada con el volumen, nos
conduce a la noci´on de vol´
umenes mixtos y a la desigualdad fundamental de Brunn-Minkowski,
quiz´a la desigualdad m´as conocida relacionando el volumen de conjuntos convexos compactos.
Pero podemos remontarnos mucho m´as atr´as en el tiempo, y encontrar cuestiones que tambi´en se
enmarcar´ıan en esta teor´ıa; Arist´oteles (384-322 A.C.) se formul´o la siguiente pregunta:
¿por qu´e el sol, cuando brilla a trav´es de un cuadrado, no produce formas rectangulares sino
c´ırculos, tal y como sucede en el caso en que ´este brilla a trav´es de una cesta de mimbre?
´ mo medir un conjunto?
¿Co
24
Una cuesti´on similar, debida a Tycho Brahe (1546-1601), trata sobre la imagen que toma el sol
sobre la pantalla de una c´amara oscura, dependiendo de la forma del diafragma.
Sol
Utilizando de manera impl´ıcita la suma de Minkowski, Kepler (1571-1630) resolvi´o el problema
de Brahe demostrando que, en nuestra terminolog´ıa, la imagen del sol es de la forma K + λB2 ,
donde K es una figura convexa, un trasladado del diafragma. En definitiva, el hecho sorprendente
que se esconde detr´as de tal efecto es que, cuando el sol pasa a trav´es de una abertura que tenga la
forma de un determinado conjunto K, la imagen que ´este produce es, precisamente, la del llamado
conjunto paralelo exterior de K, es decir, la suma vectorial (o de Minkowski) de K y un c´ırculo de
un radio adecuado. En 1840, Jakob Steiner calcul´o el ´area de esta figura (as´ı como el volumen del
correspondiente objeto en R3 ), lo que podr´ıa considerarse el inicio real de toda esta teor´ıa.
El libro de Bonnesen y Fenchel de 1934 ([2]) fue el primer estudio sistem´atico que se llev´
o a
cabo sobre Teor´ıa de Brunn-Minkowski; en ´el se recog´ıa lo que era ya una impresionante colecci´
on
de resultados, aunque todav´ıa estaba por llegar un importante crecimiento durante los a˜
nos treinta
y posteriores, gracias a los trabajos de Aleksandrov, Hadwiger, Schneider y otros muchos.
2.1.
La suma de Minkowski. Conjuntos paralelos.
Sumario. Suma de Minkowski. El conjunto paralelo exterior.
l prop´osito de esta secci´on es llevar a cabo un estudio sistem´atico de la suma vectorial de
E
conjuntos o suma de Minkowski, que de una u otra forma ya nos ha aparecido en cap´ıtulos anteriores.
Definici´
on 2.1. La suma de Minkowski de dos conjuntos cualesquiera A y B de Rn se define como
A + B = a + b : a ∈ A, b ∈ B =
(A + b).
b∈B
Proposici´
on 2.2.
(i) La suma de Minkowski conserva la convexidad y la compacidad.
(ii) Vista como una aplicaci´
on de C n × C n −→ C n , la suma de Minkowski es continua.
(iii) C n y Kn con la suma de Minkowski son semigrupos conmutativos con elemento neutro {0}.
(iv) Kn con la suma de Minkowski verifica la ley de la cancelaci´
on, esto es, si K, L, M ∈ Kn con
K + M = L + M , entonces K = L.
(v) Si K y L son dos politopos, entonces el conjunto suma K + L es tambi´en un politopo.
´rea de superficie. Los volu
´menes intr´ınsecos.
2.2 El volumen y el a
25
Otras propiedades v´alidas para subconjuntos arbitrarios A, B y C de Rn , no necesariamente
convexos, son las siguientes (λ y µ son n´
umeros reales positivos):
(A ∪ B) + C = (A + C) ∪ (B + C),
(1)
(A ∩ B) + C ⊂ (A + C) ∩ (B + C),
(2)
λA + λB = λ(A + B),
λA + µA ⊃ (λ + µ)A.
Si se exige convexidad en los conjuntos iniciales, se puede afirmar a´
un m´as:
Lema 2.3. Sean K y L cuerpos convexos de forma que K ∪ L tambi´en es convexo. Entonces
(K ∩ L) + C = (K + C) ∩ (L + C),
(3)
K + L = (K ∪ L) + (K ∩ L),
(4)
y adem´
as, λK + µK = (λ + µ)K.
Definici´
on 2.4. Sea K un cuerpo convexo de Rn . La suma de Minkowski K + λBn se denomina
el cuerpo paralelo (exterior) de K a distancia λ, para λ ≥ 0, y se representa por Kλ .
Proposici´
on 2.5. Si K es un cuerpo convexo tal que Bn (r) ⊂ K ⊂ Bn (R), entonces, para todo
ρ > 0 y todo λ > 1 se verifica que Kρ ⊂ (1 + ρ/r)K y λK ⊂ K(λ−1)R .
2.2.
El volumen y el ´
area de superficie. Los vol´
umenes intr´ınsecos.
Sumario. El volumen (´area). El ´area de superficie (per´ımetro). F´ormulas de Cauchy y Minkowski para el ´area de superficie. El polinomio de Steiner. Quermassintegrales y vol´
umenes intr´ınsecos. Valuaciones. El Teorema de Hadwiger.
2.2.1.
El volumen de un cuerpo convexo.
l volumen n-dimensional de un cuerpo convexo K en R es su medida de Lebesgue en R . Si
E
n = 2, vol(K) = A(K) se denomina ´
area de K. El volumen verifica las siguientes propiedades:
n
n
– vol(K) se mantiene inalterado bajo movimientos (r´ıgidos) de K.
– vol(µK) = µn vol(K), para µ ≥ 0.
– vol(K) = 0 si, y s´olo si, K tiene dimensi´on menor o igual que n − 1.
– El volumen depende continuamente de K.
– Si K ⊆ K , entonces vol(K) ≤ vol(K ). La igualdad se da si y s´olo si vol(K ) = 0 ´o K ≡ K .
– Si T : Rn −→ Rn es una transformaci´on af´ın dada por T (x) = M x + b, donde M es una
matriz n × n y b ∈ Rn , entonces vol T (K) = det M vol(K).
´ mo medir un conjunto?
¿Co
26
Proposici´
on 2.6. Sea K un cuerpo convexo de Rn . Dado un vector unitario u ∈ Sn−1 , representamos por Hu (t) el hiperplano Hu (t) = x ∈ Rn : u, x = t y por Kt = K ∩ Hu (t). Entonces,
∞
voln−1 (Kt ) dt.
vol(K) =
(5)
−∞
Utilizando este m´etodo se puede calcular el volumen de algunos conjuntos convexos particulares:
1. El volumen de un conjunto cil´ındrico K = L + [0, z], esto es, la suma de un conjunto convexo
L (que suponemos contenido en Hu (0)) y un segmento [0, z] = {λz : 0 ≤ λ ≤ 1} es
vol(K) = z, u voln−1 (L).
2. El volumen de un conjunto c´
onico K = conv L ∪ {x} , esto es, la envoltura convexa de un
conjunto convexo L y un punto x ∈ aff L es
vol(K) =
1
x, u voln−1 (L).
n
3. El volumen del s´ımplice Sn = conv{0, e1 , . . . , en } = conv {0, e1 , . . . , en−1 } ∪ {en } generado
por los vectores de la base can´onica es
vol(Sn ) =
1
.
n!
4. En el caso general de un s´ımplice arbitrario S = conv{v0 , v1 , . . . , vn }, donde los vectores vj
son af´ınmente independientes, basta considerar la transformaci´on af´ın T (x) = M x+v0 , siendo
M la matriz cuyas columnas son v1 − v0 , . . . , vn − v0 . Entonces,
vol(K) =
det M
.
n!
5. Sean F1 , . . . , Fr las caras (n − 1)-dimensionales de un politopo P con normales exteriores
u1 , . . . , ur , respectivamente. Podemos suponer, sin p´erdida de generalidad, que 0 ∈ int P , y
representamos por Ci = conv Fi ∪ {0} . Entonces,
vol(P ) =
1
n
r
h(P, ui )voln−1 (Fi ).
i=1
Teorema 2.7 (Minkowski). Sean F1 , . . . , Fr las caras (n − 1)-dimensionales de un politopo
P , con normales exteriores u1 , . . . , ur , respectivamente. Entonces se tiene que
r
voln−1 (Fi )ui = 0.
i=1
6. El volumen de la bola unidad Bn es
vol(Bn ) = κn =
π n/2
.
Γ n2 + 1
(6)
´rea de superficie. Los volu
´menes intr´ınsecos.
2.2 El volumen y el a
2.2.2.
27
El ´
area de superficie.
Definici´
on 2.8. El ´area de superficie de un cuerpo convexo K ∈ Kn , S(K), es el l´ımite de las a
´reas
de superficie de cualquier sucesi´
on de politopos convexos que converjan a K. Si n = 2, S(K) = p(K)
se denomina el per´ımetro de K.
Algunas propiedades del funcional ´area de superficie son las siguientes:
– S(K) permanece inalterada por movimientos de K.
– El ´area de superficie S(K) depende continuamente de K.
– Si K es (n−1)-dimensional, entonces S(K) es igual al doble de su volumen (n−1)-dimensional.
– S(K) = 0 si, y s´olo si, K tiene dimensi´on menor o igual que n − 2.
– Si K ⊂ K , entonces S(K) ≤ S(K ), d´andose la igualdad si, y s´olo si, K ≡ K ´o S(K ) = 0.
Teorema 2.9 (La f´
ormula de Cauchy, 1841). El ´
area de superficie de K es la media de los
vol´
umenes (n − 1)-dimensionales de las proyecciones ortogonales de K sobre hiperplanos, esto es,
S(K) =
1
κn−1
voln−1 (K| u⊥ ) du.
(7)
Sn−1
Teorema 2.10 (La f´
ormula de Minkowski, 1840–1901). El ´
area de superficie de un conjunto
convexo K viene dada por
S(K) = l´ım
λ→0
vol(K + λBn ) − vol(K)
.
λ
(8)
El hecho de que el ´area de superficie pueda obtenerse de este modo fue demostrado por Steiner
en 1840, aunque fue Minkowski, en 1901, quien utiliz´o tal f´ormula como definici´on.
2.2.3.
La f´
ormula de Steiner y los vol´
umenes intr´ınsecos.
L
a f´
ormula o polinomio de Steiner fue deducida originariamente por Steiner en 1840, en los casos
del plano eucl´ıdeo y el espacio tridimensional R3 , para politopos y superficies de clase C 2 . En su
forma m´as general, ´esta puede enunciarse del siguiente modo:
Teorema 2.11 (La F´
ormula de Steiner, 1840). El volumen del conjunto paralelo exterior
de K a distancia λ, Kλ , se expresarsa como un polinomio de grado la dimensi´
on del espacio, n,
en el par´
ametro λ, cuyos coeficientes son, salvo una constante, las llamadas quermassintegrales o
funcionales de Minkowski de K, Wi (K), para 0 ≤ i ≤ n:
n
vol(Kλ ) = vol(K + λBn ) =
i=0
Esta expresi´
on se conoce como el polinomio de Steiner.
n
Wi (K)λi .
i
(9)
´ mo medir un conjunto?
¿Co
28
4
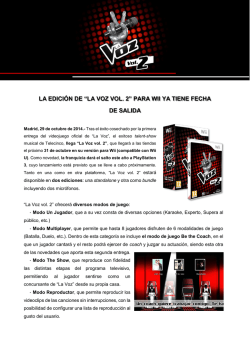
vol(K + λB3 ) = vol(K) + S(K)λ + M(K)λ2 + πλ3
3
vol(K) = volumen del conjunto original
S(K)λ = volumen de los prismas adosados a las caras
M(K)λ2 = volumen de los 3 cilindros adosados a los lados
4/3πλ3 = volumen de la bola de radio λ
Figura 2.1: El polinomio de Steiner en dimensi´
on 3.
En 1975, McMullen introdujo los vol´
umenes intr´ınsecos de K:
Definici´
on 2.12. Se denomina i-´esimo volumen intr´ınseco del conjunto K, y se representa por
Vi (K), 0 ≤ i ≤ n, a la quermassintegral normalizada de ´ındice n − i, es decir,
Vi (K) =
n Wn−i (K)
.
i
κn−i
La f´ormula de Steiner (9) en funci´on de los vol´
umenes intr´ınsecos se expresar´ıa de la forma
n
κn−i Vi (K)λn−i .
vol(K + λBn ) =
i=0
La acepci´on de volumen intr´ınseco tiene su justificaci´on en el hecho de que cuando el conjunto
K tiene dimensi´on i ≤ n, entonces el i-´esimo volumen intr´ınseco de K coincide con su volumen
i-dimensional. En particular:
Vn (K) = W0 (K) = vol(K) es el volumen usual de K.
2Vn−1 (K) = nW1 (K) = S(K) es el ´area de su superficie de K.
2π
Vn−2 (K) = nW2 (K) = M(K) se conoce como la curvatura media integral de K.
n−1
2κn−1
2
V1 (K) =
Wn−1 (K) = b(K) coincide con la anchura media de K.
nκn
κn
1
V0 (K) =
Wn (K) = 1 es la caracter´ıstica de Euler.
κn
En general, si K es de clase C 2 y su aplicaci´on de Gauss es un difeomorfismo, representando
por Hj la j-´esima funci´
on sim´etrica elemental de las curvaturas principales normalizada,
H0 = 1
y
n−1
j
Hj =
entonces
Wi (K) =
1
n
−1
ki1 . . . kij ,
1≤i1 <...<ij ≤n−1
Hi−1 (x) dx;
bd K
es decir, los Wi (K) coinciden con las integrales de las curvaturas intermedias.
´menes mixtos.
2.3 Los volu
29
Algunas propiedades de las quermassintegrales (vol´
umenes intr´ınsecos) son las siguientes:
– Si K tiene dimensi´on i, Vi (K) =
n Wn−i (K)
i
κn−i
es el volumen i-dimensional ordinario de K.
– Wi (K) es una funci´on continua y positiva en K.
– Si K ⊂ K , entonces Wi (K) ≤ Wi (K ).
– Wi (K) es invariante bajo movimientos r´ıgidos.
– Wi (K) es homog´enea de grado n − i (Vi es homog´enea de grado i) e independiente de la
dimensi´on del espacio en el cual est´e contenido el conjunto K.
Estos funcionales juegan un papel fundamental en la Teor´ıa de los Conjuntos Convexos. Sirva
de ejemplo un conocido resultado de Hadwiger (1957).
Definici´
on 2.13. Una valuaci´on sobre la familia Kn de todos los conjuntos convexos compactos de
Rn es una funci´
on ν : Kn −→ R tal que
i) ν(∅) = 0 y
ii) ν(K ∪ L) = ν(K) + ν(L) − ν(K ∩ L), siempre que K ∪ L ∈ Kn .
Teorema 2.14 (Teorema de Hadwiger, 1957). Toda valuaci´
on continua e invariante bajo movimientos r´ıgidos ν es una combinaci´
on lineal con coeficientes constantes de las quermassintegrales
(o los vol´
umenes intr´ınsecos), es decir, existen n´
umeros reales constantes c0 , . . . , cn tales que
n
ν(K) =
ci Wi (K).
i=0
2.3.
Los vol´
umenes mixtos.
Sumario. El volumen de una combinaci´on lineal. Los vol´
umenes mixtos. Relaci´on
con las quermassintegrales.
a f´ormula de Steiner es un caso particular de una f´ormula mucho m´as general que combina los
L
dos conceptos fundamentales de volumen y suma de Minkowski: con ella se obtiene el volumen de
una combinaci´on lineal arbitraria de cuerpos convexos.
Teorema 2.15. Sean K1 , . . . , Km cuerpos convexos no vac´ıos de Rn . Entonces, para n´
umeros
reales cualesquiera λ1 , . . . , λm ≥ 0, el volumen de la combinaci´
on lineal λ1 K1 + · · · + λm Km es un
polinomio homog´eneo de grado la dimensi´
on n, en las variables λi ,
m
vol λ1 K1 + · · · + λm Km =
m
···
i1 =1
vol(Ki1 , . . . , Kin )λi1 . . . λin ,
in =1
cuyos coeficientes V(Ki1 , . . . , Kin ) se denominan los vol´
umenes mixtos de K1 , . . . , Km .
(10)
´ mo medir un conjunto?
¿Co
30
En el c´alculo de esta expresi´on, los vol´
umenes mixtos se definen de la siguiente forma: si
K1 , . . . , Kn son cuerpos convexos no vac´ıos de Rn , el volumen mixto de K1 , . . . , Kn es el valor
V(K1 , . . . , Kn ) =
1
n!
n
(−1)n+k
vol(Ki1 + · · · + Kik ).
(11)
i1 <...<ik
k=1
Proposici´
on 2.16. Los vol´
umenes mixtos verifican las siguientes propiedades:
(i) Los vol´
umenes mixtos no var´ıan bajo traslaciones arbitrarias de cualquiera de sus argumentos.
(ii) Si T (x) = M x + b es una transformaci´
on af´ın, entonces
V T (K1 ), . . . , T (Kn ) = det M V(K1 , . . . , Kn ).
(iii) Son lineales en cualquiera de sus variables: si λ, µ ≥ 0,
V(λK + µL, K2 , . . . , Kn ) = λV(K, K2 , . . . , Kn ) + µV(L, K2 , . . . , Kn ).
(iv) Dependen continuamente de sus argumentos.
(v) Dados dos cuerpos convexos K y L,
V(K, . . . , K, L) =
1
vol(K + λL) − vol(K)
l´ım
.
n λ→0
λ
(vi) V(K, . . . , K) = vol(K) es el volumen ordinario de K.
(vii) Son mon´
otonos en cualquiera de sus variables y positivos: si K ⊂ L, entonces
0 ≤ V(K, K2 , . . . , Kn ) ≤ V(L, K2 , . . . , Kn ).
(viii) Son valuaciones: si K, L, K2 , . . . , Kn y K ∪ L son cuerpos convexos, entonces
V(K ∪ L, K2 , . . . , Kn ) = V(K, K2 , . . . , Kn ) + V(L, K2 , . . . , Kn ) − V(K ∩ L, K2 , . . . , Kn ).
Lema 2.17. Sean K un cuerpo convexo y P un politopo en Rn . Sea adem´
as uF el vector normal
exterior unitario de cada cara (n − 1)-dimensional F de P . Entonces,
V(K, P, . . . , P ) =
1
n
h(K, uF )voln−1 (F ).
(12)
F ∈Fn−1 (P )
Como consecuencia de este resultado, se deduce el siguiente corolario (que tambi´en se puede
obtener a partir de la propiedad (v) con la definici´on de Minkowski del ´area de superficie):
Corolario 2.18. Sea P un politopo en Rn . Entonces, S(P ) = nV(Bn , P, . . . , P ).
Lema 2.19. Sean K un cuerpo convexo y P2 , . . . , Pn politopos en Rn . Sea U ⊂ Sn−1 un conjunto
finito conteniendo todos los vectores normales exteriores unitarios de las caras de los politopos
λ2 P2 + · · · + λn Pn , con λ2 , . . . , λn ≥ 0. Vamos a representar por v(·, . . . , ·) el volumen mixto en
dimensi´
on n − 1. Entonces,
V(K, P2 , . . . , Pn ) =
1
n
h(K, u)v P2 ∩ H(P2 , u), . . . , Pn ∩ H(Pn , u) .
u∈U
(13)
2.4 La desigualdad de Brunn-Minkowski y otras desigualdades.
31
Como una generalizaci´on del lema anterior, dados ahora n − 1 cuerpos convexos K2 , . . . , Kn , el
teorema de representaci´on de Riesz permite asegurar la existencia de una u
´nica medida de Borel
n−1
finita en la esfera S
, la llamada medida mixta de ´
area de superficie S(K2 , . . . , Kn ; ·), tal que para
todo K ∈ Kn ,
1
h(K, u) dS(K2 , . . . , Kn ; u).
(14)
V(K, K2 , . . . , Kn ) =
n Sn−1
Dado que las quermassintegrales son los coeficientes que aparecen en el polinomio que determina
el volumen de la suma K + λBn , se tiene claramente que
Wi (K) = V K, (n−i)
. . . , K, Bn , .(i)
. ., Bn .
En particular,
Wn−1 (K) = V(K, Bn , . . . , Bn ) =
=
2.4.
1
n
κn
b(K).
2
h(K, u) dS(Bn , . . . , Bn ; u) =
Sn−1
1
n
h(K, u) du
Sn−1
La desigualdad de Brunn-Minkowski y otras desigualdades.
Sumario. La desigualdad de Brunn-Minkowski. La desigualdad de Pr´ekopaLeindler. Versi´on multiplicativa de la desigualdad de Brunn-Minkowski. Primera
y segunda desigualdades de Minkowski. La desigualdad de Aleksandrov-Fenchel.
n esta secci´on vamos a estudiar principalmente dos desigualdades debidas a Brunn, Minkowski,
E
Aleksandrov y Fenchel, las cuales han constituido la pieza clave para el desarrollo de la llamada
Teor´ıa de Brunn-Minkowski, n´
ucleo fundamental de la Geometr´ıa Convexa.
2.4.1.
La desigualdad de Brunn-Minkowski.
a desigualdad de Brunn-Minkowski es uno de los resultados fundamentales en la Teor´ıa de los
L
Conjuntos Convexos. De esta desigualdad pueden extraerse adem´as incontables resultados de gran
profundidad e importancia, por lo que ha sido durante muchos a˜
nos, y a´
un sigue siendo, motivo de
estudio e investigaci´on.
Teorema 2.20 (La desigualdad de Brunn-Minkowski, 1889–1910). Sean K y L dos conjuntos convexos y compactos de Rn no vac´ıos, y sea 0 ≤ λ ≤ 1. Entonces
vol (1 − λ)K + λL
1/n
≥ (1 − λ)vol(K)1/n + λvol(L)1/n ,
(15)
d´
andose la igualdad si, y s´
olo si, K y L est´
an en hiperplanos paralelos (si tienen dimensi´
on menor
que n), o son homot´eticos (si tienen dimensi´
on n).
´ mo medir un conjunto?
¿Co
32
Teorema 2.21 (Desigualdad de Brunn-Minkowski, version multiplicativa). Si A y B son
conjuntos compactos de Rn y λ ∈ (0, 1), entonces
vol (1 − λ)A + λB ≥ vol(A)1−λ vol(B)λ .
(16)
La formulaci´on dada por Minkowski del teorema, tal como hoy lo conocemos, no apareci´o hasta
1910. La desigualdad de Brunn-Minkowski fue demostrada primero por Brunn con un argumento
ingenioso e inteligente, aunque algo impreciso, donde adem´as no se establec´ıa el caso de la igualdad. Fue Minkowski quien proporcion´o una demostraci´on correcta y completa del resultado para
cualquier dimensi´on, caracterizando adem´as la igualdad.
A la vista de un resultado tan “sencillo”, parece dif´ıcil intuir las potentes extensiones que se
pueden obtener de (15), algunas muy recientes, as´ı como su impacto en las Matem´aticas y m´
as
all´a de ellas. A mitad del siglo XX, diversos matem´aticos (Lusternik, Hadwiger...) extendieron este
resultado a contextos mucho m´as generales, incluyendo la clase de los conjuntos medibles Lebesgue,
comenzando entonces la desigualdad a moverse en los dominios del An´alisis. Los u
´ltimos 30 a˜
nos
han visto consolidar el papel de la desigualdad de Brunn-Minkowski como una potente herramienta
anal´ıtica, mostrando su estrecha relaci´on con otras desigualdades del C´alculo. La versi´on integral
de la desigualdad de Brunn-Minkowski se conoce como la desigualdad de Pr´ekopa-Leindler, inversa
de la conocida desigualdad de H¨older, donde ya la geometr´ıa parece haber desaparecido.
Teorema 2.22 (Desigualdad de Pr´
ekopa-Leindler). Si λ ∈ (0, 1) y f, g, h : Rn −→ R son
funciones medibles no negativas tales que, para cualesquiera x, y ∈ Rn ,
h (1 − λ)x + λy ≥ f (x)1−λ g(y)λ
entonces
1−λ
h≥
Rn
λ
f
Rn
(17)
g
.
(18)
Rn
Entre otras desigualdades relacionadas con la (versi´on anal´ıtica) de Brunn-Minkowski en este
contexto general nos encontramos, por ejemplo, con las de Young, Brascamp-Lieb, Barthe, Sobolev,
etc. Dos magn´ıficos surveys sobre este resultado son [1, 3]. En palabras de uno de estos autores,
Richard Gardner,
...In a sea of Mathematics, the Brunn-Minkowski inequality appears like an
octopus, tentacles reaching far and wide, its shape and color changing as it
roams from one area to the next.
2.4.2.
Las desigualdades de Minkowski y la desigualdad de Aleksandrov-Fenchel.
Teorema 2.23 (Las desigualdades de Minkowski, 1903). Sean K, L ∈ Kn . Entonces,
V(K, . . . , K, L)n ≥ vol(K)n−1 vol(L)
(primera desigualdad de Minkowski),
(19)
d´
andose la igualdad si, y s´
olo si, K y L son homot´eticos. Y a´
un m´
as,
V(K, . . . , K, L)2 ≥ vol(K)V(K, . . . , K, L, L)
(segunda desigualdad de Minkowski).
(20)
´tricas. Problemas de optimizacio
´ n.
2.5 Otras medidas geome
33
Una poderosa desigualdad cuadr´atica, a partir de la cual se pueden obtener todas las desigualdades geom´etricas anteriores (y otras muchas), es la llamada desigualdad de Aleksandrov-Fenchel.
´
Esta
es la desigualdad m´as potente de este tipo que se conoce hasta el momento.
Teorema 2.24 (La desigualdad de Aleksandrov-Fenchel, 1936–37). Consideremos n cuerpos convexos K, L, K3 , . . . , Kn de Rn . Entonces
V(K, L, K3 , . . . , Kn )2 ≥ V(K, K, K3 , . . . , Kn )V(L, L, K3 , . . . , Kn ).
Este resultado fue demostrado de forma independiente por Aleksandrov (para politopos, 1937)
y por Fenchel (para cuerpos con frontera suficientemente diferenciable, 1936). En ambos casos, la
desigualdad para cuerpos convexos generales se establec´ıa por aproximaci´on. Es por esta raz´on que
la condici´on de la igualdad se pierde. Claramente, la igualdad se va a alcanzar si los cuerpos K y
L son homot´eticos, pero existen otros ejemplos de cuerpos para los cuales la igualdad tambi´en se
satisface; una caracterizaci´on precisa de la igualdad no ha podido darse hasta ahora y sigue siendo
un problema abierto.
2.5.
Otras medidas geom´
etricas. Problemas de optimizaci´
on.
Sumario. El di´ametro, la anchura, el circunradio y el inradio. Desigualdades.
n problema de optimizaci´
on geom´etrica no es otra cosa que la b´
usqueda, entre una familia de
U
objetos determinada por ciertas caracter´ısticas geom´etricas comunes, de aqu´ellos que maximizan
o minimizan (optimizan) alguna magnitud concreta. En definitiva, un problema de este tipo se
traduce siempre en una desigualdad geom´etrica, llamada as´ı porque en ella interviene un determinado n´
umero de magnitudes geom´etricas. (recordemos las desigualdades de Brunn-Minkowski,
de Aleksandrov-Fenchel, de Minkowski o la conocida desigualdad isoperim´etrica). Adem´as, en la
mayor´ıa de los casos, el inter´es fundamental radica en encontrar el conjunto o conjuntos para los
que se alcanza la igualdad, recibiendo ´estos el nombre de conjuntos extremales.
Existen muy diversas magnitudes asociadas a los conjuntos, aunque las medidas m´as estudiadas
cl´asicamente son, adem´as del volumen (´area) y el ´area de superficie (per´ımetro), el di´
ametro, la
anchura m´ınima, el inradio y el circunradio. Recordemos que
ω(K) = m´ın ω(K, u) : u ∈ Sn−1 ,
D(K) = m´ax ω(K, u) : u ∈ Sn−1 = m´ax |x − y| : x, y ∈ K .
Definici´
on 2.25. Entre todas las bolas que contienen a un conjunto convexo K, existe una que
tiene radio m´ınimo denominada circumbola (circunc´ırculo en el caso plano) de K o bola circunscrita
a K, cuyo radio recibe el nombre de circunradio de K. Se representa por R(K).
La circumbola es u
´nica, ya que si K est´a contenido en la intersecci´on de dos bolas con igual
radio R, entonces existe otra bola de radio menor que tambi´en contiene a K. Adem´as, los puntos
´ mo medir un conjunto?
¿Co
34
comunes a la frontera de K y a su circumbola se distribuyen en la superficie de ´esta de tal modo
que no est´an situados todos ellos en el mismo hemisferio, es decir, el centro de la bola circunscrita
(el circuncentro) pertenece a la envoltura convexa de dichos puntos. Y rec´ıprocamente; una bola
que contenga al conjunto y que verifique la propiedad anterior es, necesariamente, su circumbola.
Definici´
on 2.26. Entre todas las bolas contenidas en un conjunto convexo K, aqu´ellas que tienen
radio m´
aximo se denominan imbolas (inc´ırculos en el caso plano) de K o bolas inscritas en K. Tal
valor del radio recibe el nombre de inradio de K y se representa por r(K).
La imbola de un conjunto convexo no est´a, necesariamente, determinada de modo u
´nico, siendo
el conjunto de los centros de las imbolas de K (su n´
ucleo) un conjunto convexo (n − 1)-dimensional.
Adem´as los puntos comunes a la frontera de K y a su imbola se distribuyen en la superficie de ´esta
de tal modo que no est´an situados en el mismo hemisferio, es decir, el centro de la bola inscrita (el
incentro) pertenece a la envoltura convexa de dichos puntos. Rec´ıprocamente, una bola verificando
esta propiedad, y que est´e contenida en el conjunto K, es una imbola de K.
Si se consideran dos magnitudes de las anteriormente citadas, digamos X e Y , y se pretende
maximizar (minimizar) la medida Y para cada valor fijo de X, el problema consiste en determinar
una funci´on φ(X) de forma que la desigualdad Y ≤ φ(X) (respectivamente, Y ≥ φ(X)) siempre se
verifique, y de manera que para cada valor de X positivo, exista un conjunto convexo para el que se
alcance la igualdad. Un claro ejemplo de esta situaci´on lo tenemos en la desigualdad isoperim´etrica,
donde φ(p) = p2 /(4π).
Casos
(A, p)
(A, D)
(A, ω)
(A, R)
(A, r)
(p, D)
(p, ω)
(p, R)
(p, r)
(D, ω)
(D, R)
(D, r)
(ω, R)
(ω, r)
(R, r)
Desigualdades
4πA ≤ p2
4A ≤ √
πD2
2
ω ≤ 3A
A ≤ πR2
πr2 ≤ A
p ≤ πD
2D ≤ p
πω ≤ p
p ≤ 2πR
4R ≤ p
2πr ≤ p
ω≤D
√D ≤ 2R
3R ≤ D
2r ≤ D
ω ≤ 2R
ω ≤ 3r
2r ≤ ω
r≤R
Igualdad
C´ırculo
C´ırculo
Tri´angulo Equil´atero
C´ırculo
C´ırculo
Conjuntos de Anchura Constante
Segmentos
Conjuntos de Anchura Constante
C´ırculo
Segmentos
C´ırculo
Conjuntos de Anchura Constante
Conjuntos Centralmente Sim´etricos
Conjuntos de Yamanouti
C´ırculo
C´ırculo
Tri´angulo Equil´atero
Conjuntos Centralmente Sim´etricos
C´ırculo
Cuadro 2.1: Desigualdades relacionando dos magnitudes geom´etricas en el plano eucl´ıdeo.
´tricas. Problemas de optimizacio
´ n.
2.5 Otras medidas geome
35
Las desigualdades que relacionan m´as de dos magnitudes son, l´ogicamente, m´as dif´ıciles de obtener, siendo uno de los problemas m´as estudiados encontrar los conjuntos convexos que maximizan
o minimizan una magnitud Z en particular, cuando se fijan otras dos medidas, digamos X e Y . La
soluci´on a una pregunta de este tipo, como ya sabemos, se expresa por medio de desigualdades de
la forma φ(X, Y ) ≤ Z ≤ ϕ(X, Y ). Pero el problema adquiere un mayor inter´es cuando la igualdad,
para una desigualdad en concreto Z ≶ ϕ(X, Y ), no se alcanza para una u
´nica figura, sino para una
familia continua de conjuntos; en tal caso, la desigualdad Z ≶ ϕ(X, Y ) establece cu´al es el m´aximo
(o el m´ınimo) valor de Z para cada par de valores posibles que pueden tomar las magnitudes X e
Y ; son las desigualdades ´
optimas.
© Copyright 2026