
Sincronización y Control de Sistemas Lineales y no Lineales
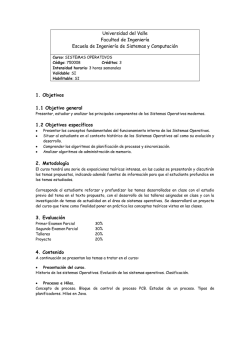
15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO Sincronización y Control de Sistemas Lineales y no Lineales J. Martinez Martinez, S.A. Rodríguez Paredes, J. de León Morales, J. G. Alonso Alfaro, A. Roldan Caballero I. INTRODUCCIÓN Resumen— Este artículo presenta un análisis del problema de Sincronización maestro- esclavo de Sistemas Lineales y Sistemas no Lineales con características homogéneas. Se selecciona como Sistema Lineal un sistema multicompuesto masa-resorte y como Sistema no Lineal un sistema cooperativo de robots manipuladores. A nivel simulación se prueban estrategias de control para seguimiento de trayectoria y de sincronización que permitan a un sistema esclavo sincronizarse con las trayectorias de un sistema maestro. Para el problema de sincronización de Sistemas Lineales se plantea una estrategia de control de seguimiento de trayectoria por medio de retroalimentación estática del vector de estados. Por otro lado para el caso de Sistemas no Lineales la estrategia de control para seguimiento de trayectoria es analizada con un enfoque energético específicamente por el método de pasividad. En ambos casos se realiza una estimación de estados por medio de observadores. E n muchos sistemas de la naturaleza y sistemas creados por el hombre la sincronización es un fenómeno natural, un ejemplo conocido es la sincronización observada entre la rotación y el movimiento orbital de la luna, de tal manera que siempre le da la misma cara a la tierra. El problema es que la sincronización no siempre se da de esa manera natural en todos los sistemas, de ahí que resulta de interés estudiar la posibilidad de forzar a los sistemas a sincronizarse, acoplando otro sistema o agregando las conexiones necesarias para lograr esta sincronización. A este proceso de lograr una sincronización forzada le llamaremos sincronización controlada [1]. La sincronización controlada se ha vuelto un tópico importante en los últimos años debido a su aplicación en teleoperación, procesos de manufactura, sistemas trabajando en esquemas coordinados, tareas de ensamble, sistemas multi-robot, etc. El comportamiento colaborativo ofrece flexibilidad y maniobrabilidad que difícilmente puede obtenerse con un sistema individual. Un campo importante dentro del tema de la sincronización, es la sincronización de sistemas robóticos [1], [2], [3], [4]. Existen otros trabajos realizados sobre sincronización de sistemas dinámicos caóticos o complejos, por ejemplo los abordados en [5], [6], [7], [8], donde se estudia la sincronización de sistemas caóticos como sistemas de Lorenz, Jerk y osciladores de Van der Pool. En este trabajo se presenta un enfoque de sincronización maestro- esclavo, para sistemas conformados por subsistemas con características homogéneas en el cual se presentan estrategias de control, probadas analíticamente y validadas a nivel simulación para la sincronización de sistemas dinámicos lineales y sistemas dinámicos no lineales. Algunos ejemplos de sistemas lineales son sistemas masa-resorte. Por otro lado el sistema dinámico no lineal abordado en este artículo está conformado por 2 manipuladores robóticos de 2 grados de libertad el cual uno funge como maestro y otro como esclavo. Palabras Clave— Sincronización, Sistemas Lineales, Sistemas no Lineales, pasividad, observadores. Abstract—This paper presents an analysis of the problem of master-slave synchronization of linear and nonlinear systems with similar characteristics. A mass-spring multicomponent system is selected as a Linear System and a cooperative system of robot manipulators as a Nonlinear System. A level simulation tracking control strategies and synchronization are tested to enable a slave system synchronized with the trajectories of a master system. For the problem of synchronization of linear systems a tracking control strategy is implemented through static state vector feedback. In addition to the case of nonlinear systems a tracking control strategy is analyzing with an energy focus specifically by the method of passivity. In both cases, state estimation is performed by observers. Keywords— Synchronization, systems, passivity, observers. linear systems, nonlinear Jesús Martínez estudiante del Instituto Politécnico Nacional/SEPI ESIME, Unidad Azcapotzalco, Distrito Federal, México. E-mail: [email protected] Salvador A. Rodríguez adscrito al Instituto Politécnico Nacional/SEPI ESIME, Unidad Azcapotzalco, Distrito Federal, México. E-mail: [email protected] Jesús de León Morales adscrito a la Universidad Autónoma de Nuevo León/FIME, Ciudad Universitaria, San Nicolás de Los Garza, Nuevo León, México. E-mail: [email protected] México D.F., 19 al 23 de octubre 2015 Jorge Alonso estudiante del Instituto Politécnico Nacional/SEPI ESIME, Unidad Azcapotzalco, Distrito Federal, México. E-mail: [email protected] Alfredo Roldán estudiante del Instituto Politécnico Nacional/SEPI ESIME, Unidad Azcapotzalco, Distrito Federal, México. E-mail: [email protected] 1 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO El problema de la sincronización parece ser una sencilla extensión de los controladores de seguimiento clásicos, sin embargo, implica retos que no se consideran en el diseño de estos. En la sincronización de sistemas dinámicos existen varios problemas fundamentales, no tener acceso al vector completo de estados, la influencia de perturbaciones externas sobre los sistemas, no contar con modelos exactos de los sistemas, tener un gran número de sistemas a sincronizar, como están conectados entre ellos, y encontrar la ley de control que se encargue de llevar a todos estos sistemas a la sincronización [9], [10], [11]. El problema de no tener acceso completo al vector de estados se debe a que, en la actualidad los sistemas no cuentan normalmente con sensores de velocidad o de aceleración, ya que estos, por su alto costo aumentan de manera considerable el costo de instrumentación de estos. Para hacer frente a esta clase de problemas se ha propuesto utilizar una herramienta virtual computacional que se encarga de estimar el valor de la velocidad a partir de la medición de la posición la cual normalmente se encuentra disponible [12], [13], [14], [15]. sincronización sólo se producirá en casos particulares. Una interpretación es ver a (7), (8) como un observador de (5), (6) 𝑞𝑚 dada la señal de salida 𝑝𝑚 = (𝐼 ∅) (𝑞̇ ). Así que en aquellas 𝑚 aplicaciones donde (5), (6) es capaz de diseñar libremente a (7), (8), se proporciona una posible solución para el problema de sincronización. Sin embargo, los sistemas (5), (6) y (7), (8) son sistemas que se dan de antemano, de modo que la sincronización no ocurrirá en forma general. Por lo que, se puede considerar una versión controlada del problema, en que permitimos que la dinámica del esclavo depende de una variable de control 𝑣. El problema de sincronización controlada formulado anteriormente se puede ver como un problema extendido de seguimiento de trayectoria. La sincronización se da cuando (5), (6) genera las señales que debe seguir (7), (8). Para esto se necesita de un compensador tal que el error de sincronización 𝒆𝒔 (𝑡) ≔ 𝑞𝑒 − 𝑞𝑚 satisfaga lim 𝒆𝒔 (𝑡) = 0 ; (10) 𝑡→∞ A continuación se reescribe el sistema (5), (6) y (7), (8) en la forma general de un Sistema Lineal propuesta en las ecuaciones (3), (4), el maestro 𝒒̇ 𝑚 = 𝐴𝒒𝒎 + 𝐵𝑢; (11) 𝑝𝑚 = 𝐶𝒒𝒎 ; (12) y el esclavo 𝒒̇ 𝑒 = 𝐴𝒒𝒆 + 𝐵𝑣; (13) 𝑝𝑒 = 𝐶𝒒𝒆 ; (14) con 𝑞𝑚 , 𝑞𝑒 ∈ ℝ𝑛 y 𝑢, 𝑣 ∈ ℝ𝑚 . Bajo el supuesto de que (C, A) es observable y (A, B) es controlable, el problema de sincronización controlada tiene solución [18]. Puesto que (C, A) es observable, existe una matriz K de tal manera que todos los valores propios de (A + KC) están en la parte izquierda abierta del plano complejo. Además, el hecho de que (A, B) es controlable implica que existe una matriz F de tal manera que todos los valores propios de (A + BF) están en el parte izquierda abierta del plano complejo. Con lo cual se puede comprobar que por medio de retroalimentación estática de se resuelve el problema de sincronización controlada. Enseguida se analiza a detalle esta propuesta. Considere el sistema maestro (11), (12) definido para todo 𝑥0 ∈ ℝ𝑛 , 𝑢 ∈ ℝ𝑚 y el controlador ̅̇𝒎 = 𝐴𝒒 ̅𝒎 + 𝐵𝜙; 𝒒 (15) ̅𝒎 ; 𝑝̅𝑚 = 𝐶𝒒 (16) Para garantizar la estabilidad, se reescriben los sistemas (11), (12) y (15), (16) en el espacio del error ̅𝒎 ; 𝒆: = 𝒒𝒎 − 𝒒 (17) entonces ̅𝒎 ) + 𝐵(𝑢 − 𝜙); 𝒆̇ = 𝐴(𝒒𝒎 − 𝒒 (18) por lo tanto se selecciona el control 𝑢 = 𝐹𝒆 + 𝜙; 𝐹 ∈ ℝ𝑚×𝑛 ; (19) así el sistema (18) en lazo cerrado se escribe como 𝒆̇ = (𝐴 + 𝐵𝐹)𝒆; (20) el cual es estable si los valores propios de (A + BF) se encuentran en la parte izquierda abierta del plano complejo para toda F. II. DESARROLLO Y/O CAMPO TEÓRICO A. Sincronización de Sistemas Lineales. En Teoría de Control [16], es posible ver a los sistemas dinámicos como objetos descritos por sistemas de ecuaciones de primer orden de la forma 𝐱̇ = 𝐟(x(t), u(t), t); (1) 𝐲 = 𝐡(x(t), u(t), t); (2) En el caso general lineal [16], [17], si todas las matrices son constantes, el sistema de ecuaciones puede ser escrito 𝐱̇ = 𝐀x(t) + 𝐁u(t); (3) 𝐲 = 𝐂x(t) + 𝐃u(t); (4) y el modelo es llamado Lineal e Invariante en el tiempo (LTI). Ahora se proponen los siguientes sistemas con características homogéneas que conforman el sistema multicompuesto maestro/esclavo 𝑞𝑚 ∅ 𝐼 ∅ 𝑞̇ ( 𝑚) = ( ) (𝑞̇ ) + ( ) 𝑢; (5) 𝐴2,1 𝐴2,2 𝐵2,1 𝑞̈ 𝑚 𝑚 𝑞𝑚 𝑝𝑚 = (𝐼 ∅) (𝑞̇ ) ; (6) 𝑚 𝑞𝑒 𝐼 ∅ )( ) + ( ) 𝑣; (7) 𝐴2,2 𝑞̇ 𝑒 𝐵2,1 𝑞𝑒 𝑝𝑒 = (𝐼 ∅) (𝑞̇ ) ; (8) 𝑒 𝑛 donde 𝑞𝑚 , 𝑞̇ 𝑚 , 𝑞𝑒 , 𝑞̇ 𝑒 están en ℝ . Se asume que el origen es uno de los puntos de equilibrio del sistema conformado por las ecuaciones (5) y (6). El sistema (5), (6) es el maestro, y el sistema (7), (8) es el esclavo. La sincronización entre el maestro y el esclavo se produce no importando cómo se inicializan, se tiene que asintóticamente sus estados coincidirán, i.e. 𝑞𝑒 𝑞𝑚 0 lim ‖(𝑞̇ ) − (𝑞̇ )‖ = ( ) ; (9) 𝑡→∞ 0 𝑒 𝑚 Normalmente, el sistema esclavo (7), (8) depende de (5), (6) a 𝑞𝑚 través de la señal de accionamiento 𝑝𝑚 = (𝐼 ∅) (𝑞̇ ), lo que 𝑚 explica la terminología maestro-esclavo. Es claro que la ∅ 𝑞̇ ( 𝑒) = ( 𝐴 𝑞̈ 𝑒 2,1 México D.F., 19 al 23 de octubre 2015 2 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO En forma semejante, se presenta un observador [19], asociado a (11), (12) i.e. ̂̇𝑚 = 𝐴𝒒 ̂𝒎 + 𝐵𝑢 + 𝐾(𝑝̂𝑚 − 𝑝𝑚 ); 𝒒 (21) ̂𝒎 + 𝐷𝑢; 𝑝̂𝑚 = 𝐶𝒒 (22) enseguida se reescriben los sistemas (11), (12) y (21), (22) en el espacio del error ̂𝒎 − 𝒒𝒎 ; 𝝃=𝒒 (23) así el sistema retroalimentado es 𝝃̇ = (𝐴 + 𝐾𝐶)𝝃; (24) Representando el sistema maestro con su controlador y observador en el dominio del error se tiene ̇ 𝐴 + 𝐾𝐶 ∅ 𝝃 ( 𝝃) = ( )( ) (25) ⏟ 𝐵𝐹 𝐴 + 𝐵𝐹 𝒆 𝒆̇ provean del máximo de beneficios y que resuelvan inconvenientes experimentados por otros esquemas de control. Figura 2.- Robots coordinados por medio de sincronización maestro-esclavo. Λ el sistema es estable si se verifica que los valores propios de Λ se encuentran en la parte izquierda abierta del plano complejo. ̂𝒎 del sistema De interés es inducir las trayectorias estimadas 𝒒 maestro al sistema esclavo (13), (14) de tal manera que se cumpla la ecuación (10). Por lo cual se propone la siguiente ley de control de sincronización ̂̇𝑚 = 𝐴𝒒 ̂𝒎 + 𝐵Φ𝑠 ; 𝒒 (26) ̂𝒎 ; 𝑝̂𝑚 = 𝐶𝒒 (27) reescribiendo los sistemas (13), (14) y (26), (27) en el espacio del error se tiene ̂𝒎 ; 𝒆𝒔 : = 𝒒𝒆 − 𝒒 (28) por lo tanto el controlador propuesto para el sistema esclavo (13), (14) es 𝑣 = 𝐺𝒆𝒔 + Φ𝑠 ; 𝐺 ∈ ℝ𝑚×𝑛 ; (29) Así en lazo cerrado la sincronización maestro-esclavo de un Sistema Dinámico Lineal se reescribe como 𝒆̇ 𝑠 = (𝐴 + 𝐵𝐺)𝒆𝒔 ; (30) el cual es estable si los valores propios de (A + BG) se encuentran en la parte izquierda abierta del plano complejo para toda 𝐺 ∈ ℝ𝑚×𝑛 . Una representación gráfica de este tipo de sincronización se encuentra en el diagrama de bloques de la Figura 1. Un Sistema Dinámico no Lineal conformado por manipuladores robóticos con características homogéneas en sincronización maestro-esclavo, como el que se encuentra en la Figura 2, es analizado enseguida desde un enfoque energético. Definición del Sistema Lagrangiano Multi-robot. En [20], [21], se plantea la utilización de la formulación de Lagrange por su simplicidad en el tratamiento de sistemas complejos involucrados en dinámicas múltiples. Las ecuaciones de movimiento para un robot con múltiples articulaciones (𝐪𝑖 ∈ ℝ𝑛 ) se pueden derivar por medio de las ecuaciones de Euler-Lagrange 1 𝑑 𝜕𝐿𝑖 (𝐪𝑖 ,𝐪̇ 𝑖 ) 𝜕𝐿 (𝐪 ,𝐪̇ ) 𝐿𝑖 = 𝐪̇ 𝑖 𝑇 𝐌𝒊 (𝐪𝑖 )𝐪̇ 𝑖 − 𝑉𝑖 ; [ ] − 𝑖 𝑖 𝑖 = 𝛕𝑖 ; (31) 2 𝜕𝐪̇ 𝑖 𝜕𝐪𝑖 𝝏𝐪̇ 𝑖 𝛕𝑖 son las fuerzas generalizadas o torques actuando en el i−ésimo robot (para este caso particular, i = m,e) y 𝐂𝒊 (𝐪𝑖 , 𝐪̇ 𝑖 )𝐪̇ 𝑖 ∈ ℝ𝑛 representan las fuerzas de Coriolis y centrifugas. Para este caso definamos al sistema maestro como 𝐌𝒎 (𝐪𝑚 )𝐪̈ 𝑚 + 𝐂𝒎 (𝐪𝑚 , 𝐪̇ 𝑚 )𝐪̇ 𝑚 + 𝐠 𝑚 (𝐪𝑚 ) = 𝛕𝑚 ; (33) y el esclavo 𝐌𝒆 (𝐪𝑒 )𝐪̈ 𝑒 + 𝐂𝒆 (𝐪𝑒 , 𝐪̇ 𝑒 )𝐪̇ 𝑒 + 𝐠 𝑒 (𝐪𝑒 ) = 𝛕𝑒 ; (34) En Sincronización de Sistemas Robóticos existen dos tareas importantes de control. La primera es plantear una estrategia de control que permita que el sistema Maestro pueda seguir una trayectoria deseada. Y la segunda plantear una estrategia de control de sincronización maestro-esclavo. De acuerdo con la propuesta de [22], se propone el siguiente controlador PD+ para seguimiento de trayectoria, 𝛕𝑚 = 𝐌𝒎 (𝐪𝑚 )𝐪̈ 𝑑 + 𝐂𝒎 (𝐪𝑚 , 𝐪̇ 𝑚 )𝐪̇ 𝑑 + 𝐠 𝑚 (𝐪𝑚 ) − 𝑲𝑝 𝐞𝒅 − 𝑲𝑣 𝐞̇ 𝒅 ; 𝑲𝑝 = 𝑲𝑝 𝑇 > 0; 𝑲𝑣 = 𝑲𝑣 𝑇 > 0; (35) El control PD+, es un algoritmo de control que incluye control proporcional del error de posición, control proporcional del error de velocidad más la dinámica completa de robot. En la Figura 1.- Diagrama de bloques en Matlab-Simulink de un Sistema Lineal en sincronización maestro-esclavo. B. Sincronización de Sistemas Dinámicos Lineales. En la conformación de sistemas cooperativos de robots manipuladores, la investigación ha dado como resultado la síntesis de múltiples leyes de control. Sin embargo, al hablar de aplicaciones reales, surgen diferentes problemas relacionados con restricciones físicas o bien de costo. Por lo tanto, resulta de gran importancia el análisis de técnicas de sincronización que México D.F., 19 al 23 de octubre 2015 𝑑𝑡 donde (1 ≤ i ≤ p) denota el índice del robot o sistema dinámico que comprenden una red, y p es el número total de los elementos individuales. Para este caso particular la ecuación (31) puede ser representada como 𝐌𝒊 (𝐪𝑖 )𝐪̈ 𝑖 + 𝐂𝒊 (𝐪𝑖 , 𝐪̇ 𝑖 )𝐪̇ 𝑖 + 𝐠 𝑖 (𝐪𝑖 ) = 𝛕𝑖 ; (32) 𝝏𝑉𝑖 𝑛 donde 𝐠 𝑖 (𝐪𝑖 ) = ∈ ℝ y denota las fuerzas de gravedad, 3 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO donde 𝑙𝑑 > 0 y escalar. Del mismo modo se puede construir un observador para obtener ̂𝑒 , 𝐪 ̂̇𝑒 , 𝐪 ̂̈𝑒 ∈ ℝ𝑛 que representan la estimación de los estados 𝐪 del robot esclavo 𝐪̇ 𝑒 , 𝐪̇ 𝑒 y 𝐪̈ 𝑒 respectivamente. estructura de este esquema de control también se involucra la trayectoria de seguimiento, velocidad y aceleración deseada. La implementación del esquema de control (35), requiere del conocimiento exacto del modelo dinámico del robot, lo cual significa que los valores numéricos de sus parámetros dinámicos se conocen [23]. Por otro lado para que el sistema alcance una sincronización maestro-esclavo se requiere que 𝐪𝑒 alcance la referencia 𝐪𝑚 , por lo que los errores de sincronización 𝐞𝒔 , 𝐞̇ 𝒔 , 𝐞̈ 𝒔 ∈ ℝ𝑛 están definidos por 𝐞𝒔 = 𝐪𝑒 − 𝐪𝑚 ; 𝐞̇ 𝒔 = 𝐪̇ 𝑒 − 𝐪̇ 𝑚 ; 𝐞̈ 𝒔 = 𝐪̈ 𝑒 − 𝐪̈ 𝑚 ; (36) Partiendo de (36) se puede la reescribir la ecuación del esclavo (34) como 𝐌𝑒 (𝐪𝑒 )𝐞̈ 𝑠 + 𝐂𝒆 (𝐪𝑒 , 𝐪̇ 𝑒 )𝐞̇ 𝑠 + 𝐠 𝑒 (𝐪𝑒 ) = 𝛕𝑒 ; (37) donde el objetivo es (𝐞𝒔 𝐞̇ 𝒔 ) = (0 0), por lo que se propone la siguiente ley de control 𝛕𝑒 = 𝐌𝑒 (𝐪𝑒 )𝐪̈ 𝑚 + 𝐂𝒆 (𝐪𝑒 , 𝐪̇ 𝑒 )𝐪̇ 𝑚 + 𝐠 𝑒 (𝐪𝑒 ) −𝑲𝑝 𝐞𝑠 −𝑲𝑣 𝐞̇ 𝒔 ; 𝑲𝑝 = 𝑲𝑝 𝑇 > 0; 𝑲𝑣 = 𝑲𝑣 𝑇 > 0; (38) ahora se propone la siguiente función candidata de Lyapunov 1 1 𝜐 = 𝐞̇ 𝑇𝑠 𝐌𝑒 (𝐪𝑒 )𝐞̇ 𝑠 + 𝐞𝑇𝑠 𝑲𝑝 𝐞𝑠 ; 𝑲𝑝 = 𝑲𝑝 𝑇 > 0; (39) 2 2 Para garantizar la estabilidad de (38), se realiza 1 𝜐̇ = 𝐞̇ 𝑇𝑠 𝐌𝑒 (𝐪𝑒 )𝐞̈ 𝑠 + 𝐞̇ 𝑇𝑠 𝐌̇𝑒 (𝐪𝑒 )𝐞̇ 𝑠 + 𝐞𝑇𝑠 𝑲𝑝 𝐞𝑠 ; (40) 2 aplicando la propiedad de antisimetría en (40) se tiene, 𝜐̇ = −𝐞̇ 𝑇𝑠 𝐂𝒆 (𝐪𝑒 , 𝐪̇ 𝑒 )𝐞̇ 𝑠 − 𝐞̇ 𝑇𝑠 𝑲𝑝 𝐞𝑠 − 𝐞̇ 𝑇𝑠 𝑲𝑣 𝐞̇ 𝑠 1 + 𝐞̇ 𝑇𝑠 𝐌̇𝑒 (𝐪𝑒 )𝐞̇ 𝑠 + 𝐞̇ 𝑇𝑠 𝑲𝑝 𝐞̇ 𝑠 ; (41) 2 𝑇 𝜐̇ = −𝐞̇ 𝑠 𝑲𝑣 𝐞̇ 𝑠 ≤ 0; (42) por lo tanto (38) es estable y se logra la sincronización entre (33) y (34) . ̂̇𝑚 , 𝐪 ̂̈𝑚 , con lo cual la ley Si no se conoce 𝐪̇ 𝑚 , 𝐪̈ 𝑚 se estiman 𝐪 de control de sincronización (38), se reescribe de la forma siguiente ̂̈𝑚 + 𝐂𝒆 (𝐪𝑒 , 𝐪 ̂̇𝑒 ) 𝐪 ̂̇𝑚 + 𝐠 𝑒 (𝐪𝑒 ) − 𝑲𝑝 𝐞𝑠 − 𝛕𝑒 = 𝐌𝑒 (𝐪𝑒 )𝐪 𝑇 𝑲𝑣 𝐞̂̇𝒔 ; 𝑲𝑝 = 𝑲𝑝 > 0; 𝑲𝑣 = 𝑲𝑣 𝑇 > 0; (43) 𝑛 ̇ ̇ ̈ ̂𝑚 , 𝐪 ̂𝑒 , 𝐪 ̂𝑚 ∈ ℝ representan la estimación de 𝐪̇ 𝑚 , 𝐪̇ 𝑒 y donde 𝐪 𝐪̈ 𝑚 respectivamente, además 𝐞̂̇𝑠 es ̂̇𝑚 ; 𝐞̂̇𝑠 = 𝐪̇ 𝑒 − 𝐪 (44) En [24], se propone un observador no lineal desde un enfoque de pasividad para robots manipuladores, este es utilizado para ̂𝑚 , 𝐪 ̂̇𝑚 , 𝐪 ̂̈𝑚 . Este observador tiene la estructura poder estimar 𝐪 siguiente en variables de estado ̂̇𝑚 = 𝐳 + 𝐿𝑑 𝐪 ̂𝑚 ; 𝐪 𝐳̇ = 𝐌𝒎 (𝐪𝑚 )[𝛕𝑚 − 𝐂𝒎 (𝐪𝑚 , 𝐪̇ 0 )𝐪̇ 0 + 𝐠 𝑚 (𝐪𝑚 ) + ̃𝑚 ]𝐿𝑝2 𝐪 ̃𝑚 ; 𝐿𝑝1 𝐪 (45) ̂𝑇𝑚 𝐳 𝑇 ] son los estados del observador, 𝐪 ̂̇𝑚 representa donde [𝐪 ̃𝑚 ≡ 𝐪𝑚 − 𝐪 ̂𝑚 es el error de estimación la estimación de 𝐪̇ 𝑚 , 𝐪 de posición del robot maestro, 𝐿𝑑 = 𝐿𝑇𝑑 > 0, 𝐿𝑝1 = 𝐿𝑇𝑝1 ≥ 0, 𝐿𝑝2 = 𝐿𝑇𝑝2 > 0, y ̂̇𝑚 − Λ2 𝐪 ̃𝑚 ; 𝐪̇ 0 = 𝐪 (46) con Λ2 = Λ𝑇2 ≥ 0. Se asume que 𝐿𝑑 , 𝐿𝑝1 , 𝐿𝑝2 y Λ2 son matrices constantes y diagonales. Sin embargo, 𝐿𝑑 y 𝐿𝑝2 , pueden ser escritos como 𝐿𝑑 = 𝑙𝑑 𝐼 + Λ2 ; (47) 𝐿𝑝2 = 𝑙𝑑 Λ2 ; (48) México D.F., 19 al 23 de octubre 2015 III. CONCLUSIONES Por medio de Matlab-Simulink se realizó la simulación de los sistemas maestro esclavo. En la gráfica mostrada en la Figura 3, se observa como la sincronización maestro-esclavo de un Sistema Dinámico Lineal masa resorte. Seleccionando los valores apropiados de las ganancias K y F, el sistema esclavo logra alcanzar la trayectoria del maestro en aproximadamente 6 segundos por consiguiente la ecuación (10) se cumple como se observa en la Figura 4. Figura 3.- Sincronización de un Sistema Dinámico Lineal. Figura 4.- Error de sincronización de un Sistema Dinámico Lineal. De igual manera se propuso un Sistema Multi-robot maestroesclavo como sistema no lineal. A nivel simulación, Robots articulados de 2 grados de libertad y con características homogéneas, consiguen sincronizarse haciendo una adecuada selección de las ganancias 𝑲𝑝 y 𝑲𝑣 de la ley de sincronización mostrada en la ecuación (43), así como también de las ganancias 𝐿𝑑 , 𝐿𝑝1 y 𝐿𝑝2 del observador no lineal propuesto para ̂𝑚 , 𝐪 ̂̇𝑚 , 𝐪 ̂̈𝑚 del robot maestro y 𝐪 ̂𝑒 , 𝐪 ̂̇𝑒 , 𝐪 ̂̈𝑒 del robot encontrar 𝐪 esclavo. En este caso es importarte observar que la sincronización se logra en las 2 articulaciones como se observa en las Figuras 5 y 6. 4 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO Figura 5.- Sincronización de las primeras articulaciones del Sistema Multirobot. Figura 8.- Gráfica que muestra la comparación la medición de la trayectoria estimada del esclavo en color verde y una estimada del maestro en color azul. Con esto se concluye que la sincronización artificial o controlada de sistemas dinámicos se logra siempre y cuando se generan las condiciones necesarias de conexión entre sistemas maestro-esclavo y de estimación completa del vector de estado. Como trabajo futuro se sugiere comprobar estas estrategias de control de sincronización a nivel experimental. IV. AGRADECIMIENTOS Los autores agradecen al Instituto Politécnico Nacional y a la Sección de estudios de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Azcapotzalco, por el apoyo brindado a través del Proyecto SIP 20150901. Figura 6.- Sincronización de las segundas articulaciones del Sistema Multirobot. V. REFERENCIAS [1] Pogromsky, A., Belykh, V., y Nijmeijer H., A Study of Controlled Synchronization of Huijgens’ Pendula, K.Y. Pettersen et al. (Eds.): Group Coord. and Cooperat. Cntrl., LNCIS 336, Springer-Verlag Berlin Heidelberg, pp. 205– 216, 2006. [2] Chung, S. J., Nonlinear Control and Synchronization of Multiple Lagrangian Systems with Applications to Tethered Formation Flight Spacecraft, Phd Tesis, Massachusetts Institute of Technology (MIT), 2007. [3] Chung, S. J. y Slotine, J. J., Cooperative Robot Control and Concurrent Synchronization of Lagrangian Systems, IEEE Paper, November 2008. [4] Nijmeijer H. y Rodriguez A., Synchronizacion of Mechanical Systems, Series Editor: Leon O. Chua. World Scientific Publishing Co. Pte., 2003. [5] Nijmeijer, H., A dynamical control view on synchronization, Physica D 154, pp. 219–228, 2001. [6] Manrubia, M., Emergence of Dynamical Order Synchronization Phenomena in Complex Systems, Editorial World Scientific, 2004 . [7] Moseklide, Maistrenko y Postnov, Chaotic Synchronization - Appliacation to Living Systems, Editorial World Scientific, 2002. [8] Ji, D., et al., Synchronization of neutral complex dynamical networks with coupling time-varying delays, Nonlinear Cabe mencionar que las trayectorias que alcanza el sistema ̂𝑚 = esclavo son las estimadas del robot esclavo es decir, 𝐪 𝑞𝑚1 (𝑞 ). 𝑚2 Otro resultado que es importante mencionar es que el observador lineal propuesto no solo permite estimar los estados ̂̇𝑚 y 𝐪 ̂̈𝑚 , también nos ayuda a reducir considerablemente el 𝐪 ruido de medición como puede compararse en las Figuras 7 y 8. Figura 7.- Gráfica que muestra la comparación de la medición de la trayectoria real del maestro en color verde y una estimada en color azul. México D.F., 19 al 23 de octubre 2015 5 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO Dyn., Springer Science Business Media B.V., Vol.65, pp. 349–358, 2011. [9] Pham, Q. C., y Slotine, J. J., Stable concurrent synchronization in dynamic system networks, Neural Networks, Vol. 20, pp. 62-77, 2007. [10] Estrada, H. J., Sincronización de sistemas mecánicos con retardos en la transmisión de datos, PhD Tesis, Centro de Investigación Científica y de Educación Superior de Ensenada (CICESE), 2008. [11] Rosas, D., Alvarez, J. y Alvarez, E., Robust synchronization of arrays of uncertain nonlinear secondorder dynamical systems, Springer Science+Business Media B.V. September 2011. [12] Canudas, C. y Fixot, N., Robot Control Via Robust Estimated State Feedback, IEEE Transactions on Automatic Control, Vol. 36, No. 12, December 1991. [13] Berghuis, H. y Nijmeijer, H., Robust Control of Robots via Linear Estimated State Feedback, IEEE Transactions on Automatic Control, Vol. 39, No. 10, October 1994. [14] Rodriguez, A., Nijmeijer, H., Mutual Synchronization of Robots via Estimated State Feedback: A Cooperative Approach, IEEE Transactions on Control Systems Technology, Vol. 12, No. 4, July 2004. [15] Nijmeijer, H. y Mareels, I., An Observer Looks at Synchronization, IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Applications, Vol. 44, No. 10, October 1997. [16] Hendricks, E., Jannerup, O., et al., Linear Systems Control, Deterministic and Stochastic Methods, SpringerVerlag, Berlin, Heidelberg, 2008. [17] Chen, T., Linear Systems Theory and Design, Oxford University Press, Inc., 3rd Ed., New York Oxford, 1999. [18] Huijberts, H., Nijmeijer, H. y Willems, R., Regulation and controlled synchronization for complex dynamical systems, Int. J. Robust Nonlinear Contr. 10, pp. 363–377, 2000. [19] Luenberger, D., Observers for Multivariable Systems, IEEE Transactions on Automatic Control, Vol. AC-II, No.2, pp. 190-197, April 1966. [20] Chao, M., et al., Synchronization of networked EulerLagrange systems by sampled-data communication with time-varying transmission delays under directed topology, Neurocomputing, 2014. [21] Abdelkader, A., et al., Synchronization of Lagrangian Systems With Irregular Communication Delays, IEEE Transactions on Automatic Control, Vol. 59, No.1, January 2014. [22] Paden, B. y Panja R., Globally asymptotically stable ’PD+’ controller for robot manipulators, Int. J. Control, Vol. 47, no. 6 1697-1712, 1988. [23] Reyes, F., Robótica, Control de Robots Manipuladores. Editorial Alfaomega, México, 2011. [24] Berghuis, H. y Nijmeijer, H., A Passivity Approach to Controller-Observer Design for Robots, IEEE Transactions on Robotics and Automation, Vol. 9, No. 6, December 1993. México D.F., 19 al 23 de octubre 2015 VI. BIOGRAFÍA Jesús Martínez Martínez recibió el título de Ingeniero en Robótica Industrial por parte de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Azcapotzalco del Instituto Politécnico Nacional (IPN), en 2009, el grado de Maestría en Ingeniería de Manufactura en el área de Robótica y Control, en la Sección e Estudios de Posgrado e Investigación de la ESIME Unidad Azcapotzalco, en 2013. Actualmente se encuentra realizando el Doctorado en la misma institución. Sus áreas de interés incluyen sincronización, control lineal y no lineal de sistemas, observadores y sistemas robóticos. Salvador Antonio Rodríguez Paredes recibió el título de Ingeniero en Comunicaciones y Electrónica por parte de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Zacatenco del Instituto Politécnico Nacional (IPN), en 1996, el grado de Maestría en Ciencias Ingeniería Eléctrica en la especialidad en Control Automático por el Centro de Investigación y Estudios Avanzados (CINVESTAV-IPN), en 1998 y el Doctorado en Automática y Prodúctica por parte del Laboratorio de Automatización del Instituto Politécnico de Grenoble (INPG), Francia, en 2003. Sus áreas de interés incluyen investigación sobre la estabilidad y la pasividad de sistemas con parámetros concentrados y distribuidos, teoría y aplicaciones, análisis bajo los enfoques de Lyapunov, Lagrangianos, Hamiltonianos y retardos. Jesús de León Morales recibió el título Licenciatura en Física en la Facultad de Ciencias Físico-Matemáticas de la Universidad Autónoma de Nuevo León desde 1981, Maestría en Control Automático del Centro de Investigaciones y de Estudios Avanzados, en 1987 y el Doctorado en Control Automático de Procesos en la Universidad Claude Bernard Lyon I, en Francia, en 1992. Actualmente es profesor investigador de la Facultad de Ingeniería Mecánica y Eléctrica de la Universidad Autónoma de Nuevo León (FIME, UANL). Fue Premio de Investigación UANL 2009 en área de Ciencias Exactas, miembro del Sistema Nacional de Investigadores nivel 2, miembro del Comité de evaluadores del CONACYT a nivel Nacional, líder del Cuerpo Académico CASEP y miembro Regular de la Academia Mexicana de Ciencia. Sus áreas de interés incluyen Control de sistemas electromagnéticos, sistemas colaborativos, maquinas inteligentes y drones. Jorge Guillermo Alonso Alfaro nació en 1982. Cursó Ingeniería Electromecánica en el Instituto Tecnológico de Toluca de 2001 a 2006. Cursó la Maestría en Ingeniería de Manufactura en la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica del IPN, de 2012 a 2014, actualmente cursa el Doctorado en Ingeniería de Sistemas Robóticos y Mecatrónicos desde el 2015 en la misma institución, donde su trabajo de investigación está enfocado al control e instrumentación de UAV´s, los Sistemas Robóticos y Mecatrónicos, así como el control de los mismos. 6 15vo CONGRESO NACIONAL DE INGENIERÍA ELECTROMECÁNICA Y DE SISTEMAS (CNIES 2015) ARTÍCULO No. SIS03 ARTÍCULO ACEPTADO POR REFEREO Alfredo Roldán Caballero. Nació en Tlaxcala, México en 1990. Obtuvo el grado de Ingeniería en Mecatrónica por la Benemérita Universidad Autónoma de Puebla (BUAP) en 2013, actualmente se encuentra cursando la Maestría en Ingeniería de Manufactura en la Escuela Superior de Ingeniería Mecánica y eléctrica (ESIME) del Instituto Politécnico Nacional (IPN) en la línea de robótica y control, sobre la instrumentación y seguimiento de trayectorias de vehículos aéreos no tripulados, bajo la dirección del Dr. Salvador Antonio Rodríguez Paredes. Dentro de sus intereses de investigación se encuentra el diseño y control en robótica móvil, así como la dinámica y control de Sistemas Mecatrónicos. México D.F., 19 al 23 de octubre 2015 7


© Copyright 2026