
Emulador Electromecánico de un Convertidor de Energía de las Olas
6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Emulador Electromecánico de un Convertidor de Energía de las Olas Marta H. Rodrigues Nunes, Alexander Cepeda Quintero, Dan El Montoya, Antonio de la Villa Jaén Resumen—Un convertidor de energía de las olas es un dispositivo capaz de interceptar y convertir la energía undimotriz en energía eléctrica. El presente trabajoreporta la implantación experimental de la extracción de energía de las olas emulando el movimiento de un sistema oscilante boyante mediante un motor eléctrico convencional, de potencia integral, controlado eléctricamente por un variador de velocidad de formato comercial, logrando reproducir la dinámica del movimiento oscilante de la boya transmitido como movimiento rotacional al eje de un generador eléctrico, también de potencia integral. En primer lugar se simulan ambos sistemas, boya-generador y motor-generador, para luego realizar el montaje experimental del sistema variador-motor-generador controlado a través de una placa electrónica de arquitectura y código abierto. Finalmente, se comparan las formas de onda de tensión a la salida del generador obtenidas por simulación con las registradas experimentalmente a través de la plataforma basada en el sistema variador-motorgenerador, de relativo bajo costo y dimensiones más reducidas que sus similares basados en sistemas hidrodinámicos. Palabras claves—Código abierto, undimotriz, variador de velocidad. energía de las olas, I. INTRODUCCIÓN La energía de las olas es una forma de almacenamiento de la energía solar. El sol produce diferentes temperaturas a través del planeta generando vientos que soplan sobre la superficie del océano que a su vez causan el oleaje. Las olas ofrecen la mayor densidad de energía de todas las fuentes de energía alternativa. Por ejemplo, una intensidad de radiación solar de 0,1 a 0,3 kW/m2 de superficie horizontal se convierte en una intensidad de flujo de potencia promedio de 2 a 3 kW/m2 en un plano vertical perpendicular a la dirección de propagación de la ola [1].El agua cubre aproximadamente el 70% de la superficie total del planeta. En un día promedio, 60 millones de kilómetros cuadrados de mares tropicales absorben un monto de radiación solar equivalente, en contenido calórico, a 245 billones de barriles de petróleo [2]. Artículo recibido el 27 de febrero de 2015. Este artículo fue financiado por la Universidad Central de Venezuela. M.H.R.N,A.C, D.M. están con la Universidad Central de Venezuela, Ciudad Universitaria de Caracas, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica, Caracas, Estado Miranda, Venezuela, Tlf. +58-2126053025, E-mail: [email protected], [email protected], [email protected] A.V.J. está con la Universidad de Sevilla, Camino de los Descubrimientos, Sevilla, España, Tlf. +34-954-487283, E-mail: [email protected] Como ocurre con las otras formas de energía renovable, la energía de las olas no está distribuida uniformemente alrededor del planeta. La distribución global de los niveles de potencia de las olas en kW/m de frente de onda se muestra en la Fig. 1, donde se observa quelas mayores fuentes de energía de las olas se encuentran principalmente a lo largo de la costa occidental de Europa, fuera de las costas de Canadá y Estados Unidos y en la costa sur de Australia y América del Sur [3]. FIG. 1. Distribución global de los niveles de potencia de las olas. Un convertidor de energía de las olas es un dispositivo capaz de interceptar y convertir la energía undimotriz en energía eléctrica. En la última década se han reportado prototipos de laboratorio, con el objeto de emular el movimiento de un convertidor de energía de las olas, utilizando motores lineales y sistemas hidrodinámicos, que son equipos sumamente costosos de propósito específico y, por lo general, de grandes dimensiones. Por ejemplo, Charles y Sánchez presentan en [4] un sistema capaz de generar oleaje en una piscina de poca profundidad utilizando un motor eléctrico lineal; D. Montoya reporta en [5] la emulación del movimiento de un sistema oscilante mediante el control de velocidad de un motor de inducción; M. Blanco y col. [6], han reportado la utilización de un generador lineal de imanes permanentes para reproducir el movimiento de un sistema oscilante; Liu y col. [7] presentaron la reproducción de los perfiles de ola típicos presentes en el golfo de México, utilizando un tanque, a escala de laboratorio, con una máquina controlada. El presente trabajo reporta la emulación experimental de la extracción de energía de las olas emulando el movimiento de un sistema oscilante boyante mediante un motor eléctrico convencional, de potencia integral, controlado eléctricamente por un variador de velocidad de formato comercial. En primer lugar, se presentan las simulaciones realizadas, tomando como base el modelo hidrodinámico desarrollado por ISBN: 978-980-7185-03-5 P-57 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Montoya y de la Villa [5]. Posteriormente, se validan experimentalmente los resultados obtenidos por medio de un sistema variador-motor-generador controlado a través de un Arduino, el cual es una plataforma de hardware libre diseñada para facilitar el uso de la electrónica en proyectos multidisciplinarios [8]. En la sección II se reseñan ensayos de laboratorio previos que han permitido emular el movimiento de un convertidor de energía de las olas mediante un motor eléctrico. En la sección III se presentan algunas definiciones necesarias para la comprensión de los sistemas undimotrices. En las secciones IV y V se describen los modelos simulados por medio del software Simulink® y se reportan las formas de onda de las respuestas obtenidas para el sistema boyagenerador y motor-generador, respectivamente. La sección VI describe el montaje de laboratorio y reporta los resultados obtenidos. En la sección VII se comparan las respuestas simuladas con las experimentales. Finalmente, en la sección VIII se presentan las conclusiones. II. ANTECEDENTES: EMULACIÓN DE CONVERTIDORES DE ENERGÍA DE LAS OLAS El trabajo de Charles y Sánchez [4] presenta un sistema basado en un motor eléctrico lineal programado para generar diversos oleajes aleatorios, tanto regulares como irregulares, que son utilizados para realizar pruebas experimentales con modelos físicos a escala de laboratorio. El motor lineal impulsa una paleta de tipo pistón, produciendo el movimiento del agua en un canal de poca profundidad, construido con una estructura metálica de aluminio. Este sistema permite contar con un equipo como base experimental para la investigación de los procesos de oleaje. El trabajo de D. Montoya [5] emula el movimiento oscilante de un sistema de extracción de energía de las olas, con un generador síncrono accionado por un motor de inducción, controlando la velocidad de rotación de este último por medio de una señal sinusoidal, obtenida a partir de un generador de señales. En consecuencia, la respuesta simulada del generador reproduce las formas de onda de tensión esperadas con las cuales estudiaron el control reactivo para los sistemas oscilantes y el desempeño del generador síncrono para controlar la extracción de potencia y la velocidad de la turbina en el caso del oscilador de columna de agua. De este trabajo se tomó el modelo hidrodinámico para las simulaciones presentadas en este artículo. M. Blanco y col. [6] describen una prueba de laboratorio donde se reproduce el movimiento de un sistema oscilante utilizando únicamente una máquina eléctrica lineal sin accionamiento mecánico (primo motor) externo; operándola máquina eléctrica lineal como dos sub-máquinas controladas por dos convertidores de potencia separados. De esta forma se controla una sub-máquina como emulador del convertidor de energía de las olas y la otra como generador lineal. Esta configuración permite probar y comparar diferentes estrategias de captura de energía de las olas bajo condiciones reales de oleaje. El trabajo de Liu y col. [7] presenta la implantación, en un laboratorio, de un sistema de generación de olas, el cual simula las condiciones del océano en el Golfo de México, permitiendo desarrollar y probar prototipos de convertidores de energía de las olas. El sistema está compuesto por un motor que, a través de un eje de transmisión, entrega potencia a un sistema de poleas y engranajes que reducen la velocidad y por medio de una serie de brazos y barras se logra el movimiento de una aleta localizada dentro del tanque de agua. III. MARCO TEÓRICO A. Energía undimotriz La energía undimotriz, o energía de las olas, es una forma de almacenamiento de la energía solar. El sol produce diferencias de temperatura a través del planeta, causando vientos que soplan sobre la superficie del océano y ocasionan el oleaje. Estas olas de aguas profundas no deben confundirse con las olas que rompen en las costas. Cuando una ola alcanza aguas superficiales disminuye su velocidad y su longitud de onda pero crece en altura. Las mayores pérdidas de energía se producen en el rompimiento de la ola y en la fricción con el fondo marino, así que sólo una fracción del recurso alcanza la costa [9]. Entre las ventajas que presenta la energía undimotriz se destacan: • Las olas ofrecen la mayor densidad de energía de todas las fuentes de energía alternativa. Por ejemplo, una intensidad de radiación solar de 0,1 a 0,3 kW/m2 de superficie horizontal se convierte en una intensidad de flujo de potencia promedio de 2 a 3 kW/m2 en un plano vertical perpendicular a la dirección de propagación de la ola [1]. • Limitado impacto negativo sobre el ambiente. No emite gases contaminantes y el impacto visual es mucho menor que con otras energías. • Las olas pueden viajar largas distancias con pocas pérdidas de energía. • Alta disponibilidad, ya que es un recurso abundante y cercano a grandes consumidores. • Se ha reportado que los dispositivos pueden generar energía durante el 90% del tiempo comparado con un 20%-30% para los dispositivos de energía eólica y solar [1]. B. Conceptos básicos Una ola transporta tanto energía cinética, asociada a la velocidad de sus partículas, como energía potencial gravitacional, asociada con su elevación. La energía total de una ola depende principalmente de dos factores: su altura (H) y su periodo (T), los cuales son funciones de la velocidad y la duración del viento. Esta energía se puede expresar en unidades de W/m de frente de onda incidente [9]. Considerando la ola como una onda plana, la modelación matemática de la función característica de elevación η(x,t)está dada por: , cos (1) donde A representa la elevación máxima, ω la velocidad angular temporal, k la velocidad angular espacial, t el tiempo y x la distancia. Esta función espacio temporal admite la representación de la Fig. 2, que permite visualizar otros parámetros característicos de la ola tales como: la longitud L, la altura H, ISBN: 978-980-7185-03-5 P-58 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) la profundidad h, la velocidad del frente de ola C y el nivel de la superficie marina SWL [10]. FIG. 2. Parámetros característicos de una ola. La energía asociada a la ola E, en unidades de J/m2, se puede calcular como: (2) a su dirección.Son capaces de absorber la energía de un frente de onda de varias veces su dimensión horizontal, así que poseen gran potencial de captura [9]. Un ejemplo de este último tipo de dispositivos es el Power Buoy, desarrollado por la compañía OPT (Ocean Power Technologies) y mostrado en la Fig. 4 [11]. Es una unidad capaz de generar hasta 40 kW de potencia [3]. Basa su funcionamiento en el aprovechamiento del movimiento vertical y pendular del oleaje a través de una boya, abierta por la parte inferior, y de unos 2 a 5 metros de diámetro. Un sistema hidráulico aprovecha el movimiento relativo entre el flotador y el mástil de la boya y bombea un fluido a alta presión que mediante una turbina acciona un generador eléctrico. La energía obtenida se traslada a la costa mediante un cable submarino. En caso de oleaje extremo, el sistema automáticamente se bloquea y cesa la generación de electricidad. Cuando la altura de las olas vuelve al nivel normal el sistema se desbloquea y comienza a operar nuevamente. Donde ρ es la densidad del agua del océano y g la aceleración de la gravedad. C. Convertidores de energía de las olas Un convertidor de energía de las olas o Wave Energy Converter (WEC) es un dispositivo capaz de interceptar y convertir la energía undimotriz de las olas en energía eléctrica útil. Los trabajos iniciales en esta área apuntaron a dispositivos flotantes y los clasificaron como: eliminador, atenuador y absorbedor puntual, tal como se muestra en la Fig. 3 [9]. Esta clasificación se basa en la descripción del principio de operación de los convertidores, presentada a continuación. FIG. 4. Ejemplo de absorbedor puntual: Power Buoy. Olas incidentes Eliminador Atenuador Absorbedor Puntual FIG. 3. Escala y orientación de los convertidores de energía de las olas. • Eliminador: dispositivos que tienen su eje principal paralelo al frente de ola, es decir, se disponen perpendiculares a la dirección de avance de la ola procurando captar toda la energía de una sola vez. • Atenuador: dispositivos que se colocan paralelos a la dirección de avance de las olas. Son estructuras largas que van extrayendo la energía de modo progresivo. Están menos expuestos a daños y requieren menores esfuerzos de anclaje que los eliminadores. • Absorbedor puntual: son estructuras con simetría axial sobre un eje vertical, de pequeñas dimensiones en comparación con la longitud de la ola incidente y por lo tanto, indiferentes D. Métodos de extracción de potencia A la hora de diseñar un WEC, se debe seleccionar el mecanismo de extracción de potencia a emplear, también denominado Power Take-Off (PTO). Este proceso puede dividirse en varias etapas, dependiendo de las diversas conversiones que ocurren hasta obtener la señal adecuada para conectarse a la red. • Extracción hidráulica: el sistema de extracción hidráulica consta de un cilindro hidráulico, una bomba hidráulica y un motor hidráulico. La ola provoca un movimiento ascendente y descendente del pistón del cilindro, bombeando un fluido presurizado (normalmente aceite) a través de la bomba, la cual alimenta el motor hidráulico. De este motor se obtiene el movimiento rotativo necesario para accionar un generador eléctrico. Estos sistemas son más baratos de diseñar y construir que los mecanismos de conversión de energía directa, pero las pérdidas en el bombeo y en el motor lo convierten en un sistema mecánico de baja eficiencia, además por la gran cantidad de partes móviles que posee impone mantenimiento alto[1]. ISBN: 978-980-7185-03-5 P-59 6TO CONGRESO IBEROAMERICANO ANO DE ESTUDIANTES D DE INGENIERÍA ELÉCTRICA CA (VI CIBELEC 2015) • Extracción neumática: ell diseño de turbina de aire más popular para este tipo de aplicaciones es la turbina de Wells por su habilidad de rotar en laa misma dirección sin importar la dirección del flujo de aire. Esta turbina se acopla a un generador eléctrico. Los sistemas de extracción neumática tienen limitada eficiencia (60 - 65%) y suelen ser ruidosos [1]. • Extracción directa: los generadores lineales son aquellos que convierten directamente la energía del movimiento oscilante de vaivén a velocidad reducida en energía eléctrica de baja frecuencia que necesitará ser procesada por dispositivos de electrónica de potencia para ser conectada a la re red de frecuencia industrial. El dispositivo consta de una parte móvil llamada translator sobre el cual se montan los imanes con polaridad alterna. El translator se mueve linealmente cerca de un estator estacionario que contiene bobinas formadas por espiras conductoras. onductoras. Entre el translator y el estator existe un entrehierro que sirve de medio para que se induzca tensión en los arrollados estatóricos, debido al campo magnético que cambia con el movimiento del convertidor. Un gran número de sistemas de extracción directa han sido diseñados durante los últimos años. En su mayoría, estos diseños involucran un absorbedor puntual y un sistema de referencia, donde el movimiento relativo lineal entre ambos es el que produce la generación. E. Esquema del sistema a estudiar En la Fig. 5 se observa el esquema del sistema bajo estudio, basado en el modelo presentado por Tedeschi y Molinas [12] [12]. Este sistema está conformado por una boya esférica de 2,5 m de radio, rígidamente unida a una pértiga restringida a movimiento vertical al bajo la acción de las olas incidentes. La pértiga posee una cremallera que engrana con un piñón de dientes rectos. Este engranaje transforma el movimiento rectilíneo vertical de la pértiga, en movimiento rotacional sobre el eje del generador eléctrico, sin necesidad de ningún sistema hidráulico o neumático intermedio. La carga eléctrica del generador será considerada puramente resistiva. oscilante de la boya para transmitirlo como movimiento rotacional al eje del generador. Se estudió el caso de oleaje regular, para olas con alturas de 1 m, 1,5 m y 2 m con periodos de 6 s, 8 s y 10 s respectivamente. n por medio del sistema motormotor FIG. 6. Esquema de emulación generador. Para el montaje experimental se utilizaron máquinas rotativas trifásicas de potencia integral, disponibles en el Laboratorio de Máquinas Eléctricas de la Escuela de Ingeniería Eléctrica “Melchor Centeno V.” de la Universidad Central de Venezuela; específicamente, specíficamente, una máquina asincrónica rotor bobinado cortocircuitado ocircuitado y una máquina sincrónica, cuyos datos atos de placa se muestran en la Tabla I y en la Tabla II, respectivamente. TABLA I E PLACA DEL MOTOR ASINCRÓNICO AS UTILIZADO. PRINCIPALES DATOS DE Potencia nominal [kVA] Tensión nominal [V] Corriente nominal [A] Frecuencia nominal [Hz] Velocidad de sincronismo [rpm] 3,5 120/208 16,8/9,7 50 1000 TABLA II PRINCIPALES DATOS DE PLACA DEL GENERADOR SINCRÓNICO UTILIZADO. Potencia nominal [kVA] Tensión nominal [V] Corriente nominal [A] Frecuencia nominal [Hz] Velocidad de sincronismo [rpm] Tensión de excitación nominal [V] Corriente de excitación nominal [A] 5 110/220 26,3/13,1 50/60 1000/1200 125 3,3 Siguiendo los procedimientos descritos en las guías de laboratorio [13] basadas en estándares de la IEEE, IEEE se parametrizaron los circuitos equivalentes equivalente de régimen permanente de ambas máquinas (ver Fig. 7 y Fig. 8). FIG. 5. Modelo simplificado del convertidor de energía de las olas a emular. El esquema de la emulación del sistema se presenta en la Fig. 6.. Se sustituye la boya, la pértiga y el engranaje por un motor eléctrico asincrónico controlado por un variador de velocidad que debe reproducir la dinámica del movimiento FIG. 7. Circuito equivalente monofásico del motor. ISBN: 978-980-7185-03-5 P-60 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG. 8. Circuito equivalente monofásico del generador. Es importante destacar que se despreció el efecto de la temperatura (aumento de la resistencia óhmica por calentamiento) y el efecto piel (dependencia de la inductancia con la frecuencia) en los parámetros de estos modelos. Adicionalmente, se determinó el momento de inercia de cada máquina, obteniendo un valor de 0,3 kg·m2 para el motor asincrónico y 0,112 kg·m2 para el generador sincrónico. El variador de velocidad a utilizar es el Altivar 66 de la marca Telemecanique, cuyos parámetros principales se resumen en la Tabla III. TABLA III CARACTERÍSTICAS PRINCIPALES DEL VARIADOR DE VELOCIDAD. Tensión de alimentación [V] Potencia motor [HP] Entradas lógicas Salidas lógicas Entradas analógicas Salidas analógicas 208/230 (trifásica) 10 4 (24 V, 10 mA) 2 (24 V, 200 mA máximo) 2 (0 – 10 V/ 4 – 20 mA) 4 – 20 mA La señal de consigna de velocidad se obtiene a partir de la simulación del sistema hidrodinámico (conjunto boyagenerador). Esta señal se debe adecuar para que sea compatible con el variador de velocidad a utilizar. En primer lugar, se consideró la utilización de una tarjeta de adquisición de datos, pero se presentó la dificultad de que no permitía el funcionamiento en tiempo real. También, se intentó con un DSP (Digital SignalProcessor) pero la versión disponible no cuenta con salidas analógicas, por lo que no era posible la comunicación directa con las entradas analógicas del variador de velocidad. Por último, se realizaron pruebas con un Arduino Uno, plataforma de hardware y programación de código abierto, basada en una placa con un microcontrolador y un entorno de desarrollo, que cuenta con 14 pines de entradas/salidas digitales, de las cuales 6 pueden ser usadas como salidas PWM, 6 entradas analógicas y comunicación para PC, vía conexión USB. En la Fig. 9 se muestra la cara frontal de la placa [8]. FIG. 9. Arduino Uno. Las pruebas realizadas con el Arduino Uno resultaron satisfactorias; a pesar de que no cuenta con salidas analógicas, se comprobó que, para el caso de un motor controlado por un variador de velocidad, se puede realizar el control por medio de una señal PWM ya que la máquina toma el valor promedio de la señal y responde de forma adecuada. Esta señal PWM se puede conectar directamente a una de las entradas analógicas del variador de velocidad. Se aprovechó la librería de la compañía Mathworks® que permite programar algoritmos en Simulink® compatibles con el microprocesador Arduino, lo cual facilitó la programación. Para lograr que el motor tenga el comportamiento deseado, girando hacia un lado y hacia el otro dependiendo del semiciclo de la onda sinusoidal de control de velocidad, se debe configurar el variador para que permita este funcionamiento. El variador Altivar 66 permite utilizar sus dos entradas analógicas como consigna de velocidad. La entrada analógica AI1 puede tomar valores de 0 a 10 V y la entrada analógica AI2 valores de 0 a 5 V. Se puede configurar el variador para que la señal de AI2 se multiplique por (-1), se sumen ambas señales (AI1 + AI2) y si el resultado es negativo se invierta el sentido de giro. Por lo tanto, la señal obtenida a la salida del modelo boyagenerador se ajusta para que sólo tome valores positivos de 0 a 5 V (valores de tensión a la salida del Arduino Uno) y se conecta a la entrada AI1. En otra de las salidas PWM de la placa Arduino se coloca un valor DC de 2,5 V y se conecta a la entrada AI2. De esta forma se logra el comportamiento deseado para la aplicación. El montaje final realizado en el laboratorio se muestra en la Fig. 10. FIG. 10. Diagrama de conexiones del montaje realizado en el laboratorio. IV. SIMULACIÓN DEL SISTEMA BOYA-GENERADOR El modelo de simulación en el dominio del tiempo que se muestra en la Fig. 11 ha sido implementado en Matlab™ Simulink® con el fin de observar la forma de onda de tensión a la salida del generador y determinar los parámetros de velocidad necesarios para configurar la señal de consigna para la posterior emulación experimental. El subsistema hidrodinámico implementado, con base a [5], modela el comportamiento del convertidor de energía de las olas. Las entradas de este subsistema son la fuerza del PTO y la fuerza de excitación. Este subsistema tiene como salidas la posición, la velocidad y la aceleración del flotador o boya. La velocidad lineal del flotador se convierte en una velocidad angular. Esta velocidad es la entrada mecánica del bloque que modela el generador síncrono (disponible en una de las ISBN: 978-980-7185-03-5 P-61 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) librerías del software Simulink®). En este bloque se introducen todos los parámetros del generador eléctrico a utilizar (Fig. 8). A la salida del generador se coloca una carga resistiva pura de 2,4 kW (equivalente a la carga disponible en el laboratorio). Al finalizar la simulación, que modela el comportamiento del sistema durante cinco minutos, se obtienen las formas de onda de tensión y velocidad. FIG. 11. Modelo del sistema boya-generador. Por cuestiones de espacio sólo se muestran tres de las formas de onda de tensión por fase (a) y velocidad (b) obtenidas como resultado de la simulación (ver Figuras 12, 13 y 14). (b) FIG. 12. Formas de onda para el caso de altura 2 m y periodo 6 s (sistema boya-generador). (a) ISBN: 978-980-7185-03-5 P-62 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) V. SIMULACIÓN DEL SISTEMA MOTOR-GENERADOR En la Fig. 15se muestra el modelo de simulación en el dominio del tiempo que ha sido implementado en Matlab™ Simulink® con el fin de emular el comportamiento del convertidor de energía de las olas por medio de un motor asincrónico al cual se le aplica un control de velocidad y observar la forma de onda de tensión a la salida del generador. Simulink® ofrece la posibilidad de un bloque que representa un motor asincrónico con un variador de velocidad incorporado. Este bloque tiene como entrada la alimentación del motor, la referencia de velocidad (Fig. 12(b), Fig. 13(b) y Fig. 14(b)) y el par de la carga, es decir del PTO. También en este bloque, se configuran las características del motor utilizado (Fig. 7) y los parámetros del variador (Tabla III). En este modelo, la velocidad del motor asincrónico es la que se usa como referencia de velocidad para el generador síncrono. Los demás parámetros del generador no cambian respecto al modelo anterior. (a) (b) FIG. 13. Formas de onda para el caso de altura 2 m y periodo 8 s (sistema boya-generador). (a) FIG. 15. Modelo del sistema motor-generador. Al finalizar la simulación, que se lleva a cabo por un tiempo de tres veces el periodo de la ola, se obtienen las formas de onda de tensión a la salida del generador. Por cuestiones de especio, sólo se muestran tres casos en las Figuras 16, 17 y 18. (b) FIG. 14. Formas de onda para el caso de altura 2 m y periodo 10 s (sistema boya-generador). ISBN: 978-980-7185-03-5 P-63 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) (a) FIG. 19. Montaje experimental. FIG. 16. Forma de onda de tensión por fase para el caso de altura 2 m y periodo 6 s (sistema motor-generador). FIG. 17. Forma de onda de tensión por fase para el caso de altura 2 m y periodo 8 s (sistema motor-generador). FIG. 18. Forma de onda de tensión por fase para el caso de altura 2 m y periodo 10 s (sistema motor-generador). (b) A continuación se muestran en las Figuras 20, 21 y 22, las tres formas de onda que corresponden a los tres casos reportados previamente como resultados de las simulaciones. FIG. 20. Forma de onda de tensión por fase para el caso de altura 2 m y periodo 6 s (experimental). FIG. 21. Forma de onda de tensión por fase para el caso de altura 2 m y periodo 8 s (experimental). VI. EXPERIMENTACIÓN VII. ANÁLISIS DE RESULTADOS En la Fig. 19 se muestra el montaje experimental: en (a) se observan las máquinas y los instrumentos utilizados y en (b) el control de velocidad. Se realizaron las pruebas respectivas para todos los casos de oleaje antes mencionados y se registraron las formas de onda a la salida del generador con un osciloscopio marca Tektronix de la serie TDS3000. Se puede observar que las formas de onda de tensión obtenidas en ambas simulaciones, sistema boya-generador y sistema motor-generador, y las obtenidas experimentalmente presentan un comportamiento similar. En el caso de las olas de altura 2 m y periodo 6 s y 8 s, se observa una diferencia menor a 1 V entre las formas de onda simuladas y las experimentales. ISBN: 978-980-7185-03-5 P-64 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Para la ola de altura 2 m y periodo 10 s, la diferencia entre el valor pico de la tensión por fase simulada y el valor experimental es de aproximadamente 4 V. Adicionalmente, a partir del montaje experimental realizado en este trabajo, se podría implementar una realimentación, ya sea de corriente o potencia, desde la carga hacia un dispositivo que corra en línea el modelo hidrodinámico; de forma tal que la referencia de velocidad del motor se ajuste en tiempo real a los cambios de la carga eléctrica. REFERENCIAS BIBLIOGRÁFICAS [1] [2] [3] [4] FIG. 22. Forma de onda de tensión por fase para el caso de altura 2 m y periodo 10 s (experimental). [5] VIII. CONCLUSIONES [6] La energía de las olas es una de las energías renovables que se perfila como una alternativa viable y eficiente para el futuro, sin embargo aún existen una gran cantidad de desafíos a resolver. Uno de los principales retos es la adecuación de la señal obtenida a la salida del generador a la red de frecuencia industrial. Para poder evaluar diversas estrategias de control es importante contar con métodos que permitan obtener las típicas formas de onda de tensión. En este artículo se presentan las formas de onda de tensión típicas, obtenidas utilizando solamente un motor de inducción convencional al cual se le aplica un control de velocidad por medio de un variador de velocidad de formato comercial y una placa Arduino, montaje experimental de relativo bajo costo y dimensiones más reducidas que sus similares basados en sistemas hidráulicos o equivalente. Se estudiaron los escenarios de oleaje regular, sin embargo esta misma estrategia de control se puede aplicar para oleajes irregulares, simplemente modificando la señal de consigna de velocidad que se le indica al Arduino. [7] [8] [9] [10] [11] [12] [13] B. Drew et al. “A review of wave energy converter technology”. Proceedings of the I Mech E, Part A: Journal of Power and Energy, 2009, pp. 887-902. N. Bravo. “Sistema de Conversión Mecánica Eléctrica para un Generador Undimotriz”. Tesis de Pregrado, Facultad de Ciencias Físicas y Matemáticas, Universidad de Chile, 2008. CRES. “Ocean Energy Conversion in Europe. Recent advancements and prospects”. Informe Técnico, Center for Renewable Energy Sources, European Commission, 2006. R. Charles y L. Sánchez. “Generador de oleaje aleatorio con motor lineal”. Encuentro de Investigación en Ingeniería Eléctrica, 2005, pp. 11-20. D. Montoya. “Modelado y Control de Centrales Undimotrices. Aplicación a Sistemas Oscilantes y Osciladores de Columna de Agua”. Tesis de Maestría, Universidad de Sevilla, 2010. M. Blanco, M. Lafoz y L. Tabares. “Laboratory tests of linear electric machines for wave energy applications with emulation of wave energy converters and sea waves”. Proceedings of the 2011-14th European Conference on Power Electronics and Applications, 2011, pp. 1-10. Y. Liu et al. “Design and Construction of a wave generation system to model ocean Conditions in the Gulf of Mexico”. International Journal of Energy & Technology, 2012, pp. 1-7. Arduino (consultada en noviembre de2014). “Arduino Uno”. Disponible en http://arduino.cc. J. Cruz. “Ocean Wave Energy. Current Status and Future Perspectives”. Springer Series in Green Energy and Technology, 2008. J. Falnes. “Ocean Waves and Oscillating Systems. Linear interactions including wave-energy extraction”. Cambridge University Press, 2004. Kostadinov. “Energy From Ocean Waves: Current State and Perspectives”. Interesting Engineering, 2014. E. Tedeschi y M. Molinas. “Wave-to-Wave Buoys Control for Improved Power Extraction under Electro-Mechanical Constraints”. IEEE International Conference on Sustainable Energy Technologies (ICSET), 2011. J. Chassande, et al. “Guía del Laboratorio de Máquinas Eléctricas: Máquinas de Corriente Continua, Máquinas Asincrónicas y Máquinas Sincrónicas”. Universidad Central de Venezuela, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica, Departamento de Potencia, 2010. ISBN: 978-980-7185-03-5 P-65 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Análisis del Sistema Eléctrico de Potencia de las Divisiones Punta de Mata y Furrial de PDVSA Oriente, considerando la Implementación de un Esquema de Detección de Operación en Modo Isla Carlos Vásquez, Loureing Betancourt, Rhonald Quijada Resumen—En el presente trabajo se analiza el comportamiento en régimen permanente y transitorio del sistema eléctrico de PDVSA Dirección Ejecutiva de Producción Oriente, considerando la incorporación de las nuevas plantas de generación de ciclo simple a gas que entrarán en operación para el año 2.015. La metodología de estudio consideró la determinación de las condiciones de operación en régimen permanente en t=0- y bajo la activación del esquema de detección de modo isla y posterior separación del Sistema Interconectado Nacional. Luego se realizó un estudio de estabilidad transitoria (t=0+), para evaluar la respuesta dinámica de los generadores y las variables eléctricas en las barras del Sistema, durante la ocurrencia de fallas en la red troncal a 765 kV, así como pérdida de generación en Guayana, que activen el esquema de detección de modo isla. Finalmente, se evaluó el impacto en la red originado por el arranque del motor de mayor capacidad considerando la operación en isla. Para determinar el modelo dinámico del motor, fue necesario estimar los parámetros de su circuito equivalente, así como la aplicación del método de regresión no lineal para obtener el modelo de la carga partiendo de los datos suministrados por el fabricante. Palabras claves— Arranque de Motor, Contingencia, Cortocircuito, Estabilidad, Flujo de Carga, Plantas de Generación. I. INTRODUCCIÓN El incremento acelerado en la demanda de un Sistema Eléctrico de Potencia, puede ocasionar la operación de la red de transmisión cerca de los límites de transporte así como déficit en la Generación de Energía Eléctrica, pudiendo ocasionar un impacto negativo en la productividad de las industrias. El Sistema Eléctrico Nacional (SEN) venezolano no escapa a esta realidad, por lo cual Petróleos de Venezuela S.A Artículo recibido el 27 de Febrero de 2015. Este artículo fue financiado por Petróleos de Venezuela S.A. C.V., L.B. y R.Q. están con la Petróleos de Venezuela S.A., Av Alirio Ugarte Pelayo, Edificio ESEM, Gerencia de Estudios y Proyectos Servicios Eléctricos Oriente, Maturín, Estado Monagas, Venezuela, Tlf. ++58-29164028172818, +58-424-9287257, E-mail: [email protected], [email protected], [email protected] (PDVSA) desarrolló un Plan de Autosuficiencia Eléctrica a nivel Nacional, cuyo alcance contempla la ejecución de proyectos de generación en sus áreas operacionales. En el Oriente del país, específicamente en las Divisiones Furrial y Punta de Mata de PDVSA, se tiene previsto la instalación de 290,8 MW ISO de Generación Termoeléctrica Ciclo Simple a Gas, siendo la potencia generada inyectada al Sistema Eléctrico de Transmisión de 115 kV del sector petrolero, disponiendo de esta manera de un sistema autosuficiente. No obstante se plantea como premisa mantener la interconexión con el SEN para garantizar confiabilidad y disponibilidad en el suministro de energía, lo que implica intercambio de flujos de potencia a través del sistema de transmisión del SEN y de PDVSA para satisfacer requerimientos del sector No Petrolero. En este artículo se evalúa el comportamiento del sistema de PDVSA Dirección Ejecutiva de Producción (DEP) Oriente, realizando estudios sobre la base de datos 2.016 que modela la red de transmisión de PDVSA y el SEN en el Oriente del País, empleando el Software ETAP Power Station. Los análisis abarcarán el estudio de Flujos de Potencia y la evaluación del comportamiento dinámico del sistema ante grandes perturbaciones. Dentro de las perturbaciones grandes se encuentran: cambios bruscos momentáneos o sostenidos de grandes cargas, pérdidas de generación, pérdidas de líneas importantes y fallas tipo cortocircuito y fases abiertas. Como perturbaciones pequeñas se puede mencionar: un cambio pequeño y gradual de la carga, cambios en la ganancia de un regulador automático de voltaje en el sistema excitación de una unidad generadora, entre otras. [1] II. DESCRIPCIÓN DEL SISTEMA ELÉCTRICO DE LA DEPO El Sistema Eléctrico de PVDSA Dirección Ejecutiva de Producción Oriente, está conformado por la red de Transmisión de las Divisiones Punta de Mata y Furrial, constituidas por 266,4 km de líneas en 115 kV y una capacidad instalada de transformación de 1.070,35 MVA. Este sistema se encuentra interconectado con el SEN, ISBN: 978-980-7185-03-5 P-66 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) mediante Subestaciones de Transmisión pertenecientes a la Corporación Eléctrica Nacional (CORPOELEC). En la Fig. 1, se muestra el Sistema Eléctrico de Transmisión de PDVSA Planificado para el año 2.016. FIG. 1. Sistema Eléctrico de PDVSA planificado para el 2.016. III. PREMISAS DEL ESTUDIO A. Régimen Permanente • El estudio, se desarrollará en la base del Sistema Eléctrico de Potencia Región Oriente, con la Generación y Demanda estimada para el año 2.016. • Se consideró la Operación de las Plantas de Generación Eléctrica El Furrial (PGEF) de 4 x 58 MW ISO (punto de operación 40 MW cada máquina) y PIGAP II de 2 x 29,4 MW ISO (punto de operación 25 MW cada máquina). • Durante la operación en isla, se ajustó como referencia del sistema (Swing) la Unidad 100 de la PGEF. El resto de la generación instalada se modeló como elemento PV. • Los Generadores existentes Jusepín y Santa Bárbara en servicio, con un punto de Operación de 16 MW@V:1,00 p.u. y 12 MW@1,00 p.u. respectivamente. B. Régimen Dinámico • La activación del Esquema de Detección de Operación en Modo Isla se realizará por variaciones de frecuencia por debajo de 59 Hz y por encima de 60,85 Hz con un tiempo de retardo de 100 ms + tiempo de actuación relé + tiempo de actuación de las teleprotecciones + tiempo de operación interruptor. • Adicionalmente, se tendrá activación por variación de voltaje por debajo de 80% y por encima de 110% con un tiempo de retardo de 250 ms + tiempo de actuación relé + tiempo de actuación de las teleprotecciones + tiempo de operación interruptor. • El ajuste de los relés de mínima tensión (ANSI 27) en las barras del PDVSA se establece en 85%@5s. • El estudio de arranque de motores se realizará tomando en cuenta las recomendaciones y mejores prácticas para su ejecución descritas en la IEEE Std 399, considerando un escenario de mínimo nivel de cortocircuito y máxima carga en el sistema. [2] • Se evaluará el arranque del motor mayor en Miniplanta 3 (MPEJ-3), para lo cual la inercia del sistema a considerar corresponderá únicamente a la asociada al motor más el Coupling Gear (acoplamiento Motor-Carga) el cual modela el efecto de la caja de velocidad que se encarga de acoplar la carga mecánica al motor luego del período de arranque. Una vez acoplado se incrementará gradualmente la carga hasta alcanzar 100% del valor nominal. IV. CRITERIOS DEL ESTUDIO A. Régimen Permanente: En régimen permanente solo se evaluarán los perfiles de voltaje en las barras de 115 kV. Se verificará que el voltaje en las barras de las subestaciones permanezca entre 0,95 p.u. y ISBN: 978-980-7185-03-5 P-67 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) 1,05 p.u. para condición normal de operación y posterior a la activación del esquema de detección de modo isla. B. Régimen Dinámico • Se analizará las variaciones del ángulo de los rotores de los generadores presentes en el sistema (δ, en Grados), así como también las gráficas de la frecuencia (%f) y tensión (%V) en todas las barras a 115 kV. Estos parámetros permiten determinar el comportamiento transitorio del sistema y verificar su estabilidad ante la ocurrencia de perturbaciones y fallas con activación del Esquema de Detección de Modo Isla. • Para el análisis de los resultados se tomarán en cuenta las recomendaciones establecidas en el capitulo 8 (“Stability Studies”) de la norma IEEE Std.399-1997, que establece que, para que un sistema sea estable las oscilaciones del ángulo del rotor deben amortiguarse dentro de un valor por debajo de los 6s, esta respuesta se considera como “Respuesta de Estabilidad Normal” [2]. Sin embargo, existe otra situación que se considera “Respuesta de Estabilidad Marginal” esto ocurre cuando el sistema después de ser sometido a una perturbación no es capaz de normalizar antes de los 5 s. • En las Barras a 115 kV se verificará que al ocurrir el evento transitorio no se provoque un “sag” de voltaje menor a 0,85 p.u durante un tiempo mayor a 5 s, a fin de evitar la actuación de las protecciones de mínima tensión. • En el instante cuando se inicie el arranque de motores los perfiles de voltaje se evaluarán bajo los lineamientos establecidos dentro de la norma ANSI C84.1 en condición de contingencia (Rango B), para verificar los criterios de calidad de servicio. [3]. En la Tabla I, se resumen los rangos ANSI. TABLA I RANGOS DE VOLTAJE SEGÚN ANSI C84.1. Rango A B Máximo Voltaje de Utilización y Servicio 105% 105,20% Mínimo Voltaje de Voltaje de Utilización Servicio 90% 97,53% 86% 95% • Para garantizar que el arranque del motor sea seguro, se debe garantizar la operación por debajo de los valores establecidos en la curva de límite térmico de la ANSI/IEEE Std. 620, la cual define que la corriente del arranque del motor debe estar comprendida entre seis veces la corriente nominal (6In) para tiempo de daño de 6,25 s y tres veces la corriente nominal (3In) para 60 s. [4]. Las curvas de límite térmico se muestran en la Fig. 2. C. Modelado del Sistema Eléctrico de Potencia en Estudio. Para evaluación de la red eléctrica de la Dirección Ejecutiva de Producción Oriente, se modeló el sistema de generación en Guayana (Sistema Regional A y B) y las líneas de transmisión a 765 kV, 400 kV y 230 kV de la región oriental. Para los puntos de Interconexión con el Sistema Eléctrico Centro-Occidente 765 kV, 400 kV y 230 kV, se calcularon equivalentes de Thevenin mediante la ejecución de flujos de carga y cortocircuito en una base de datos del Sistema Interconectado Nacional caso 2016. FIG. 2. Curvas de límite térmico - ANSI/IEEE Std. 620 V. EVALUACIÓN DEL SISTEMA EN RÉGIMEN PERMANENTE A. Modelado del Sistema Eléctrico de Potencia en Estudio. Para evaluación de la red eléctrica de la Dirección Ejecutiva de Producción Oriente, se modeló el sistema de generación en Guayana (Sistema Regional A y B) y las líneas de transmisión a 765 kV, 400 kV y 230 kV de la región oriental. Para los puntos de Interconexión con el Sistema Eléctrico Centro-Occidente 765 kV, 400 kV y 230 kV, se calcularon equivalentes de Thevenin mediante la ejecución de flujos de carga y cortocircuito en una base de datos del Sistema Interconectado Nacional caso 2016. B. Escenarios de Evaluación en Régimen Permanente. Una vez construida la base para la simulación se ejecutó el análisis de flujo de carga considerando los siguientes escenarios de operación: • Escenario 1. Condición Normal de Operación del Sistema: interconexión del sistema eléctrico de Punta de Mata y Furrial con el SEN, tal como se muestra en la Fig. 1. • Escenario 2. Separación del sistema eléctrico de Punta de Mata y Furrial del SEN, conservando la interconexión con la barra 115 kV de la subestación El Furrial. Turbogenerador Santa Bárbara operando en isla, como se muestra en la Fig. 3. C. Análisis de Resultados del Estudio en Régimen Permanente. La evaluación en régimen permanente, permitió obtener los perfiles de voltaje en las barras de 115 kV para los escenarios evaluados con la finalidad de verificar que estos se encuentren dentro del rango en las premisas del estudio. Los resultados se muestran en la Fig. 4. ISBN: 978-980-7185-03-5 P-68 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG. 3. Esquema de Separación Sistema Petrolero del SEN. resumen los modelos de excitatriz y gobernador utilizados por Planta. TABLA II MODELOS DE EXCITATRIZ Y GOBERNADOR TURBOGENERADORES PDVSA. Planta de Generación Furrial PIGAP Jusepín/Santa Bárbara FIG. 4. Comportamiento de los Perfiles de Voltaje Subestaciones 115 kV. En los diferentes escenarios evaluados se pudo observar que los perfiles de voltaje obtenidos en las Barras de Transmisión del Sistema a 115 kV de PDVSA se encuentran dentro de los rangos de establecidos en los criterio del estudio. VI. EVALUACIÓN DEL SISTEMA EN RÉGIMEN DINÁMICO A. Modelo Matemático de los Turbogeneradores. El sistema de excitación y el gobernador de los Turbogeneradores conectados a la red, fueron modelados de acuerdo a las especificaciones técnicas de los fabricantes; los cuales se encuentran avalados por la IEEE. En la Tabla II, se Excitatriz SGT GTH Type 3 Gobernador AC5A AC8B GTS Adicional a la definición del tipo excitatriz y gobernador, el ETAP permite tres tipos de modelado para los generadores, los cuales son equivalente, transitorio y subtransitorio. El utilizado en este estudio fue el modelo subtransitorio ya que en él intervienen una mayor cantidad de parámetros que definen la unidad generadora. B. Modelo Dinámico del Motor de Mayor Capacidad. Dentro del análisis dinámico se plantea el desarrollo de un estudio de arranque de motores, para determinar el comportamiento del motor de mayor capacidad y la carga asociada durante el proceso de aceleración del mismo. De este estudio, se determinará el tiempo que tarda el motor en vencer el par resistente de la carga, y verificar si durante este proceso se respetan los límites térmicos del motor. Adicionalmente, es posible obtener el impacto del arranque del motor en el sistema. Los motores de mayor capacidad con arranque directo son los asociados a las Miniplantas Compresoras de Jusepín, con capacidad de 9.890 kW@13,2 kV alimentados desde la ISBN: 978-980-7185-03-5 P-69 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Subestación Jusepin I - 115/13,8 kV a través de transformadores de potencia de 37,5 MVA, tal como se muestra en la Fig. 5. Donde ai son los coeficientes del polinomio, n corresponde al número de puntos de la curva considerados, mientras que los valores de X y Y representan las coordenadas de cada punto. Es importante considerar que el grado de ajuste a la curva obtenido se verifica a través de El Coeficiente de Determinación (R²) el cual se obtiene de la división entre la Suma de los Cuadrados de la Regresión (SCR) y de los Totales (SCT), siendo un ajuste óptimo cuando este coeficiente se acerca a la unidad. [5] SCR = a1 ∑x+a ∑x +a ∑x (∑ Y ) SCT = ∑ Y − 2 2 3 3 2 2 (5) (6) n Obteniéndose la expresiones: X⋅ Y ∑ x = ∑ XY − ∑ n ∑ FIG. 5. Diagrama Unifilar Barras 1 y 2 Subestación Eléctrica Jusepín I. ∑ Para efectos del modelado dinámico de estos motores y la carga mecánica acoplada, se utilizaron los siguientes datos suministrados por el fabricante: a) El momento de inercia del motor y de la carga (Wk2 MOTOR y Wk2 CARGA) b) La curva característica torque vs. velocidad de la carga. c) La curva característica torque, corriente y factor de potencia vs. velocidad del motor. d) El torque máximo, el torque inicial. e) La curva de daño del motor. El ETAP dentro de sus herramientas permite estimar los parámetros del circuito equivalente del motor así como modelar la carga a partir de los datos característicos suministrados por el fabricante. Para poder modelar el comportamiento del par de la carga vs velocidad, se debe introducir en el software un polinomio, el cual se puede determinar empleando métodos de regresión no lineal, partiendo de la curva suministrada por el fabricante. El método regresión no lineal consiste en determinar los coeficientes de cada término de un sistema de “ecuaciones normales” [5]. El sistema de ecuaciones a utilizar es el siguiente: a 0 n + a1 ∑ X + a ∑ X + a ∑ X = ∑Y a ∑ X + a ∑ X + a ∑ X + a ∑ X = ∑ XY a ∑X +a ∑X +a ∑X +a ∑X =∑X Y a ∑X +a ∑X +a ∑X +a ∑X =∑X Y 2 3 2 3 2 0 2 0 1 3 4 2 4 1 4 2 3 3 0 3 1 3 (2) 5 2 (3) 6 3 (4) 3 5 2 (1) Σx, Σx² y Σx³ mediante las siguientes 2 x = ∑ X ⋅ ∑Y 2 ∑ X 2Y − (8) n X ⋅ Y ∑x =∑X Y − ∑ n ∑ 3 (7) 3 3 (9) Los datos de placa del motor se muestran en la Fig. 6. FIG. 6. Datos de placa del Motor MPEJ-3. Aplicando la metodología descrita, se obtuvo el modelo dinámico del motor y la carga mecánica asociada, como se muestra en la Fig. 7 y Fig. 8. C. Casos de Evaluación en Régimen Dinámico. Una vez definido el modelo dinámico del motor mayor y los turbogeneradores, se procedió con el planteamiento de los casos de estudio, aplicados a los escenarios establecidos en el análisis en régimen permanente; siendo estos: a) Salida de las líneas 1 y 2 Guri “B”- Malena 765 kV. b) Pérdida de tres (03) Unidades de generación pertenecientes a la casa de máquinas N°1 de Guri, que representan la salida de un bloque de generación de 1.080 MW. c) Arranque del Motor MPEJ-3, operando el sistema en el escenario 2 descrito en el análisis en régimen permanente. ISBN: 978-980-7185-03-5 P-70 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG 7. Curva de torque vs. Velocidad del compresor MPEJ-3. FIG 8. Curva de torque, factor de potencia y corriente vs. velocidad del motor MPEJ-3. D. Análisis de Resultados Obtenidos del Estudio Dinámico. Se analizaron los tres casos descritos anteriormente, de los cuales se pudo obtener el comportamiento del voltaje en las barras a 115 kV, la frecuencia, el ángulo absoluto de los generadores del sistema y los parámetros eléctricos y mecánicos del MPEJ-3 durante su aceleración. En primer lugar, en las Figuras 9, 10 y 11, se presentarán los resultados del caso “a” (salida de las líneas 1 y 2 Guri “B”Malena 765 kV), para luego mostrar en las Figuras 12, 13 y 14, los resultados del caso “b” (pérdida de tres (03) unidades de generación pertenecientes a la casa de máquinas N°1 de Guri, que representan la salida de un bloque de generación de 1.080 MW). Ambos casos corresponden a fallas en el sistema eléctrico nacional de Venezuela. Para los casos “a” y ”b”, se observó que el sistema presenta una tendencia a lograr la estabilidad angular por definición en aproximadamente 9s y 10 s respectivamente, luego de haber ocurrido el evento. Los perfiles de voltaje post-falla en las barras a 115 kV del sistema caen por debajo de 85%, durante un tiempo aproximado de 200 ms una vez actuado el esquema de detección del modo isla, los voltajes se mantuvieron por encima de 0,95 p.u. (respetando los límites establecidos en los criterios del estudio). De lo expuesto anteriormente se puede inferir que el sistema presenta una tendencia a lograr una estabilidad “marginal” ante la ocurrencia de grandes eventos que puedan ocurrir en el SEN, evidenciándose que la capacidad de recuperación del sistema se ve más comprometida ante la ocurrencia de eventos de gran impacto en la red troncal de transmisión. FIG. 9. Voltaje en las Barras a 115 kV - Caso “a” ISBN: 978-980-7185-03-5 P-71 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG. 10. Frecuencia en las Barras a 115 kV - Caso “a” FIG. 11. Ángulo de los Generadores - Caso “a” ISBN: 978-980-7185-03-5 P-72 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG. 12. Voltaje en las Barras a 115 kV - Caso “b” FIG. 13. Frecuencia en las Barras a 115 kV - Caso “b”. ISBN: 978-980-7185-03-5 P-73 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG. 14. Ángulo de los Generadores - Caso “b” Ahora bien, un tercer caso, aquí llamado caso “c”, corresponde al arranque del motor MPEJ-3, operando el sistema en el escenario 2 descrito en el análisis en régimen permanente. En la Fig. 15, se muestra el comportamiento de los perfiles de voltaje en las barras del motor y de la red de transmisión de PDVSA, durante el arranque directo de este motor. El voltaje mínimo visualizado en la barra del motor para la operación en isla fue de 81,74%, determinándose que el arranque bajo la condición en Isla habilitaría un pick up del Relé de mínima tensión durante un tiempo considerable que pudiese implicar la desconexión de las cargas asociadas a esa Barra. Con respecto a las barras de las subestaciones en 115 kV, se pudo determinar que el “Sag” de voltaje estuvo en el rango de 90% a 95%; por encima del ajuste de desconexión por mínima tensión, tal como se muestra en la Fig. 15. No obstante, valores próximos a 90% en las barras a 115 kV, puede originar desconexión de carga producto de la variación de voltaje en el sistema. Con respecto a las corrientes de arranque del motor y el tiempo de aceleración del motor, se determinó que este fue de 4,66In@7,12s, tal como se muestra en la Fig. 16. El tiempo de aceleración de la máquina se obtuvo mediante la observación del parámetro Deslizamiento (%Slip), parámetro que corresponde a la diferencia entre la velocidad síncrona y la velocidad del rotor. Adicionalmente, se puede apreciar el comportamiento Dinámico del Motor durante su arranque, se visualiza el comportamiento del Torque del Motor y la Carga, como es vencida la inercia del sistema, obteniéndose a su vez el arranque seguro del motor respetando los límites térmicos de la máquina. VII. CONCLUSIONES Del análisis de Flujo de Carga se muestra que bajo la condición de operación en estado estable del sistema eléctrico de PDM-Furrial operando en modo “Isla”, se observó que para todos los escenarios evaluados los perfiles de Voltaje se encuentran dentro del rango establecido en los criterios del estudio. La implementación de un Esquema de Detección en Operación en Modo Isla permitiría mantener la continuidad operacional del sistema eléctrico de la Dirección Ejecutiva de Producción Oriente, ante la ocurrencia de grandes perturbaciones en el SEN. Basándose en el enfoque dado del trabajo, se pudo determinar que la incorporación de las plantas de generación operando de manera interconectada con el SEN o aislada del mismo, satisface en ambos regímenes, los criterios de calidad de servicio expuestos, garantizando la operación del sistema eléctrico petrolero en el Oriente del País dentro de parámetros técnicos aceptables, siempre y cuando no se permita el arranque del motor de la Miniplanta MPEJ-3 ante la operación en isla del sistema, ya que bajo esta condición se pudiese originar una desconexión de carga por mínima tensión. En tal sentido, se debe evaluar el cambio en el método de arranque, es decir, implementar un arranque a voltaje controlado con limitación de corriente. ISBN: 978-980-7185-03-5 P-74 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) FIG. 15. Comportamiento Perfiles de Voltaje - Caso “c” FIG. 16. Comportamiento parámetros del Motor y la Carga MPEJ-3. Caso “c ISBN: 978-980-7185-03-5 P-75 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) [4] REFERENCIAS BIBLIOGRÁFICAS [1] [2] [3] Stevenson, W. “Análisis de Sistemas Eléctricos de Potencia”. Editorial McGraw-Hill, 1986 2da Edición. IEEE Std-399-1997 “Recommended Practice for Industrial and Commercial Power Systems Analysis”. ANSI C84.1-2006 “For Electrical Power Systems and EquipmentVoltage Ratings (60Hz)”. [5] IEEE Std 620-1996 “Guide for the Presentation of Thermal Limit Curves for Squirrel Cage Induction Machines”. C. Vásquez (2009). “Metodología para el Estudio de Arranque Dinámico de Motores Grandes Caso: Planta de Inyección de Agua Monagas – Distrito Norte PDVSA”. II CNV CIGRE. ISBN: 978-980-7185-03-5 P-77 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Metodología para el Estudio de Sobretensiones Originadas por Descargas Atmosféricas en Líneas Aéreas de Distribución de 13,8 kV Leonel Vivas, Pedro Ramírez, Yvan Hernández Resumen— El estudio de sobretensiones originadas por descargas atmosféricas en sistemas eléctricos de distribución ha recibido especial atención los últimos años, debido a la necesidad de aumentar la disponibilidad de estos sistemas en la industria. El presente trabajo plantea una metodología de estudio que permite evaluar el rendimiento ante fallas originadas por sobretensiones debido a descargas atmosféricas en las líneas aéreas de distribución. La metodología plantea un procedimiento de recolección de información de la línea sobre la que se requiera aplicar el estudio, a fin de realizar un modelado de la misma en la herramienta de simulación digital TFlash v 4.0.22, a través de la cual se pueden estimar la tasa de salida por causa de descargas atmosféricas en dicha línea y observar el comportamiento del fenómeno de manera transitoria. La metodología desarrollada se aplica a la línea Amana – Muscar 13,8 kV del sistema eléctrico de PDVSA División Punta de Mata sobre la cual se plantean propuestas de mejoras en el apantallamiento, aislamiento y puesta a tierra, en función de los resultados obtenidos en la simulación. Palabras claves— Descargas Atmosféricas, Distribución, Sobretensiones, Tasa de Salida Líneas de I. INTRODUCCIÓN Mediante el desarrollo del presente artículo se plantea una metodología de estudio que permite mejorar el rendimiento de las líneas aéreas de distribución, mediante una serie de propuestas obtenidas a partir de la evaluación de elementos propios de la línea, tales como apantallamiento, aislamiento, descargadores de sobretensión y sistema de puesta a tierra; además tomando en cuenta sus características geográficas y topográficas. La metodología ofrece una estructura mediante la cual se puede analizar el comportamiento de una línea ante sobretensiones originadas por descargas atmosféricas, haciendo uso de la herramienta TFlash v 4.0.22, mediante la simulación de tres escenarios asociados a los tipos de falla que Artículo recibido el 27 de Febrero de 2015. Este artículo fue financiado por Petróleos de Venezuela S.A. L.V., P.R. e Y.H. están con Petróleos de Venezuela S.A., Dirección Ejecutiva de Producción Oriente, Gerencia Servicios Eléctricos Oriente, Av. Alirio Ugarte Pelayo, C.C. Petroriente, PB Oficinas 29-30, Maturín, Estado Monagas, Venezuela, Tlf. +58-426-2902484 / +58-291-6402833/ +58-2916402830,E-mail: [email protected], [email protected], [email protected] pueden tener lugar en una línea eléctrica por concepto de descargas atmosféricas. En primer lugar se analizan impactos de descargas atmosféricas directos al conductor de guarda, los cuales dan lugar a sobretensiones en los conductores directamente proporcionales a la magnitud de corriente de rayo y la resistencia de puesta a tierra de la línea [1]. El segundo escenario simula impactos directos al conductor de fase, con el que se pueden detectar las fallas de apantallamiento presentes en la línea, las cuales serán corregidas mediante cálculo manual según el modelo electrogeométrico de EPRI [2]. El último escenario de simulación contempla impactos a tierra cercanos a la línea, los cuales inducen sobretensiones en los conductores que son calculadas mediante el modelo simplificado de Rusk [3], para su posterior análisis y comparación con respecto a las características de aislamiento de la línea.De esta forma, en cada uno de los escenarios se simulan impactos de rayo de diferentes magnitudes, a fin de determinar los valores críticos de falla y calcular su probabilidad de ocurrencia mediante el modelo de probabilidad de magnitud de corriente de rayo descrito en [4], para su posterior análisis. Todos estos tipos de falla representan una contribución sobre la tasa de salida de la línea por descargas atmosféricas, la cual en esta metodología será determinada mediante una rutina de cálculo estadístico ejecutada a través de la herramienta de simulación TFlash v 4.0.22, con la finalidad de facilitar el análisis y la detección de debilidades que permitan determinar soluciones necesarias para disminuir la tasa de salida en líneas existentes o líneas a construir. Para el presente estudio la metodología obtenida será aplicada a un caso asociado al sistema de distribución de la División Punta de Mata. II. FUNDAMENTOS TEÓRICOS A. El Rayo El rayo es una descarga transitoria de elevada intensidad; la mitad de estos rayos ocurren en el interior de la nube, y la otra mitad entre nube y tierra. B. Proceso de Descarga de una Nube En el estudio y cálculo de sobretensiones un rayo puede ser visto como una fuente de corriente que puede tener polaridad positiva, negativa e incluso ambas, lo que se conoce como onda bipolar. En general, se han identificado cuatro tipos de rayos entre nube y tierra [5]. Las descargas negativas forman ISBN: 978-980-7185-03-5 P-78 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) el 90 % de las descargas que caen a tierra a lo largo de todo el planeta (categoría 1); menos del 10 % de las descargas son positivas (categoría 3). También existen descargas iniciadas desde tierra hasta la nube (categorías 2 y 4), sin embargo, estas descargas son relativamente raras y ocurren normalmente en zonas de gran altitud. En la Fig. 1 se pueden ver las diferencias entre las cuatro categorías comentadas [5]. 0.04 . 1 E. Intensidad de Corriente Crítica de Flameo Se refiere al valor crítico de magnitud de corriente del rayo a partir del cual se generará un flameo en alguno(s) de los aisladores de una línea al ser impactada por dicho rayo. F. Parámetros de Intensidad de Corriente del Rayo La probabilidad de la magnitud pico del primer impacto de una descarga atmosférica se determina mediante la siguiente expresión: 1 2 ⁄31 . 1 FIG. 1. Tipos de rayo entre nube y tierra. La ecuación (2) muestra la probabilidad de que una corriente pico de rayo I0 sea mayor o igual a una magnitud de corriente i0, esta es aplicable a valores de I0 menores a 200 kA [6]. C. Nivel Ceráunico (Td) Corresponde al número de días al año en los que ocurre tormenta en una determinada región. G. Forma Onda de Corriente del Rayo La forma de onda de corriente del rayo estandarizada en [7] corresponde a la forma doble exponencial mostrada en la Fig. 2, los parámetros de estas son: D. Densidad de Descargas a Tierra (Ng) Es el número de descargas al año en un área de 1 km2 [6], se calcula a partir del nivel ceráunico mediante la ecuación (1). Tiempo de subida = 2 µs Tiempo de cola = 20 µs Tiempo máximo = 50 µs FIG. 2. Forma de onda doble exponencial. H. Tipos de Fallas por Descargas Atmosféricas en Líneas Eléctricas Aéreas Las sobretensiones originadas por descargas atmosféricas en líneas aéreas dependen del tipo de falla, según la incidencia del rayo estas pueden ser: Falla por Descarga Retroactiva (backflashover) – Ocurre cuando el impacto de rayo incide directamente sobre el conductor de guarda de modo que los aisladores se someten a una diferencia de potencial directamente proporcional a la resistencia de puesta a tierra de la estructura poste y a la magnitud de la corriente del rayo (Fig. 3, tomada de [1]), si esta diferencia de potencial supera el nivel de CFO (Critical Flashover) de los aisladores, entonces se produce el flameo. Falla de Apantallamiento (ShieldingFailure) – Ocurre cuando el impacto de rayo incide directamente sobre uno de los conductores de fase de la línea, normalmente esto es ocasionado cuando no hay conductor de guarda o cuando este está dispuesto de forma incorrecta de modo que no brinda un blindaje apropiado a los conductores de fase. De acuerdo a [2] el ángulo de apantallamiento del conductor de guarda se puede calcular mediante el Modelo Electrogeométrico de Atracción, el cual se muestra en la Fig. 4. ISBN: 978-980-7185-03-5 P-79 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) respecto al conductor de fase más expuesto de tal forma que no ocurran impactos a este último, esto es posible matemáticamente mediante la determinación del ángulo de apantallamiento perfecto. FIG. 3. Ejemplo de falla por descarga retroactiva. FIG. 5. Modelo conceptual de apantallamiento perfecto. De acuerdo a esto, la corriente crítica se usa para determinar las distancias de impacto Rs y Rp, luego la distancia horizontal Xsp requerida entre el conductor de guarda y el conductor de fase más expuesto está dada por la ecuación: * FIG. 4. Modelo electrogeométrico de atracción. Actualmente se han desarrollado varias fórmulas para determinar las variables presentadas en la Fig. 4, sin embargo, las usadas en esta metodología son las recomendadas por [2], las cuales son: 3.6 10 . 1.7!" 43 # $% & 5.5 . . $% $% $% $% ' 40 ( 40 ( 3 4 5 Donde: Rs = Distancia de impacto al conductor de guarda, m. Rp = Distancia de impacto al conductor de fase, m. Rg = Distancia de impacto a tierra, m. I = Intensidad de corriente crítica de flameo, kA. yc = Altura promedio de cualquier conductor, m. yp = Altura promedio del conductor de fase, m. ys = Altura promedio del conductor de guarda, m. La Fig. 5 presenta el modelo conceptual de apantallamiento perfecto de [2], el cual es utilizado en la metodología para las correcciones de ángulo de apantallamiento que puedan requerirse según los resultados obtenidos.Este concepto se basa en determinar la ubicación del conductor de guarda con #+ # ,- # - . 6 El ángulo de apantallamiento requerido θ es el calculado mediante la ecuación (7): * 4 7 / 01"2 3 - #Esto garantiza que cualquier impacto que sea de magnitud igual o mayor a la que puede ocasionar un flameo por impacto en el conductor de fase, va a ser atraído por el conductor de guarda. Falla por Descargas Inducidas (Induced Flashovers) – Ocurren por impactos de rayo a tierra que inciden en las cercanías de la línea, estos generan sobretensiones inducidas capaces de producir flameo en los aisladores dependiendo de la cercanía del impacto y la magnitud de corriente del mismo. La ecuación (8) permite determinar el voltaje inducido en una línea aérea sin conductor de guarda (modelo de Rusck simplificado [3]): .6 5 36.5 8 $ Donde: I = Magnitud de corriente pico del rayo, h = Altura promedio de la línea respecto al suelo, y = Distancia más cercana entre el rayo y la línea. El voltaje inducido se reduce en líneas con conductor de guarda de acuerdo a la proximidad de este con los conductores de fase, por lo que en estos casos debe multiplicarse la ecuación (8) por un factor entre 0.6 y 0.9. ISBN: 978-980-7185-03-5 P-80 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) III. HERRAMIENTAS Y MÉTODO A. Materiales Las herramientas requeridas para el desarrollo de la metodología propuesta son los siguientes: • TFlash v 4.0.22: Herramienta de Simulación computacional mediante la cual se realiza el modelado de la línea eléctrica en estudio y se simula su comportamiento ante descargas atmosféricas. • Dispositivo GPS: Requerido cuando no se tiene información de la ubicación geográfica de los postes o estructuras que conforman la línea en estudio. • Probador de Resistencia de Puesta a Tierra: Requerido para medir la resistencia de puesta a tierra de los postes o estructuras que conforman la línea eléctrica en estudio. B. Método La metodología usada para el desarrollo del estudio planteado en esta investigación puede resumirse en el diagrama mostrado en la Fig.6. Simulación de Tipos de Falla – Comprende el desarrollo de los siguientes escenarios: Escenario No. 1: Impacto de Descarga Atmosférica Directo al Conductor de Guarda. Con el objetivo de determinar la magnitud de corriente crítica de rayo a partir de la cual se generará flameo a través de los aisladores. Escenario No. 2: Impacto de Descarga Atmosférica Directo a un Conductor de Fase. Se determina poste a poste las vulnerabilidades existentes en el apantallamiento de la línea. Escenario No. 3: Impacto de Descarga Atmosférica a Tierra o Cercano a la Línea Aérea de Distribución en Estudio. Las sobretensiones inducidas se calculan a partir de la ecuación (8). Cálculo de Tasa de Salida – Mediante una rutina de cálculo estadístico ejecutada a través de la herramienta de simulación computacional TFlash V 4.0.22, se determina la tasa de salida forzada de la misma en salidas/100 km/año, dicha tasa está compuesta por las tasas de salida asociadas a cada tipo de falla, presentada por poste y de forma totalizada. Evaluación de Opciones de Mejora – De acuerdo a los resultados obtenidos de la simulación de los tipos de falla y del cálculo de la tasa de salida se evalúa: FIG. 6. Diagrama de proceso de metodología de estudio de sobretensiones originadas por descargas atmosféricas en líneas aéreas. Recolección de Datos – Comprende el proceso de recolección de información asociada a las características técnicas de la línea eléctrica y demás datos necesarios para la realización del modelado en la herramienta de simulación computacional TFlash v 4.0.22, los cuales son: nivel ceráunico, nivel de voltaje, topografía del corredor de la línea, ubicación de los postes, resistencia de puesta a tierra, disposición geométrica de los conductores, características de los conductores de fase, características de los conductores de guarda, características técnicas de los descargadores de sobretensión, aisladores y crucetas. Modelado de la Línea Aérea – Con los datos obtenidos se realiza el modelado de la línea aérea bajo estudio mediante la herramienta de simulación computacional TFlash v 4.0.22, a partir de dicho modelado se realiza la evaluación del comportamiento de la línea ante sobretensiones originadas por descargas atmosféricas. 1. Aumento de la Capacidad de Aislamiento. En el caso de líneas de distribución, [3] recomienda el uso de aisladores con un nivel de CFO mínimo de 300 kV. 2. Mejora del Sistema de Puesta a Tierra. De acuerdo a [8], el valor de resistencia de puesta a tierra de los postes en líneas de distribución no debe ser mayor a veinticinco ohmios (25 Ω). 3. Corrección del ángulo de apantallamiento. Esto se logra determinando el ángulo de “Apantallamiento Perfecto” del conductor de guarda de la línea de acuerdo al método detallado en [2]. 4. Incremento en la cantidad de descargadores de sobretensión. Propuesta de Ajustes – A partir de la evaluación realizada se estructura la mejor configuración de la línea. IV. MODELADO DE LA LÍNEA Y SIMULACIÓN La metodología descrita en esta investigación se aplicó sobre la línea II Amana-Muscar 13,8 kV, perteneciente al sistema eléctrico de PDVSA División Punta de Mata. A. Modelado de la Línea II Amana-Muscar 13,8 kV Las características de la línea obtenidas en levantamiento de campo son las mostradas en la Tabla I. Además de la información referida en la tabla anterior, es necesario cargar la información relacionada con la ubicación de la línea en la herramienta de simulación TFlash, a fin de obtener un modelo que arroje resultados precisos. La ubicación de la línea II Amana-Muscar 13,8 kV, corresponde al norte del Estado Monagas. Basado en los datosdel Sistema de Detección de Descargas Atmosféricas ISBN: 978-980-7185-03-5 P-81 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) (SDDA) de la empresa Corpoelec, se tiene una referencia del mapa isoceráunico del territorio nacional en [9], en el que para la zona de la línea en estudio corresponde un nivel ceráunico (Td) de 80 días/año, con lo que aplicando la ecuación (1) se tiene una densidad de descargas a tierra (Ng) de 9,57 descargas/km2/año. TABLA I CARACTERÍSTICAS DE LA LÍNEA II AMANA – MUSCAR 13,8 KV. LÍNEA II AMANA-MUSCAR 13,8 KV Longitud de la Línea Voltaje Nominal Número de Postes Número de Conductores por Fase Conductor de Potencia Número de Cables de Guarda Conductor de Guarda Tipo de Poste Tipo de Aislador CFO Aislador Descargador de Sobretensión 0,724 km 13,8 kV 9 1 ASCR 477 kcmil 1 3/8” Tubular de acero (40 pies) Polimérico Clase (ANSI C29.13) DS28 + 190 kV SIEMENS 3EK7 150-3AD4-Z P12 Mediante el levantamiento de campo, con ayuda de un dispositivo GPS, se obtuvo la localización de cada uno de los postes que conforman la línea,lo que permitió generar el perfil topográfico de la línea resumido en la Fig.7, el cual servirá de entrada para el modelado en la herramienta de simulación. FIG. 7. Perfil topográfico ajustado a TFlash del corredor de la Línea Amana-Muscar II 13,8 kV. FIG. 8. Perfil de resistencia de puesta a tierra ajustado a TFlash de la Línea II Amana-Muscar 13,8 kV. FIG. 9. Perfil de intensidades de corriente crítica ante impactos en el conductor de guarda a lo largo de la Línea II Amana-Muscar 13,8 kV. C. Escenario No. 2 La Fig. 10 presenta un resumen donde se aprecia la magnitud de intensidad de corriente crítica a partir de la cualfallará la línea a raíz de un flameo en alguno(s) de sus aisladores; lo inferior que resultan estas magnitudes de corriente en comparación con las obtenidas en el escenario n°1, sugiere que por pequeña que sea la magnitud del rayo (por tratarse de magnitudes altamente probables como las señala el gráfico), si este impacta directamente en un conductor de fase esto se convertirá en una falla en la línea. Tras la medición de puesta a tierra en cada uno de los postes se obtuvo el perfil de resistencia de puesta a tierra de la línea Amana – Muscar 13,8 kV, el cual se muestra en la Fig. 8. La línea azul indica el máximo valor de resistencia de puesta a tierra permitido por la norma ANSI IEEE C2 para estructuras de líneas de distribución (25 Ω). B. Escenario No .1 En la Fig. 9 se aprecia la magnitud de la intensidad de corriente crítica para los impactos ocurridos al conductor de guarda en cada poste. Sobre cada columna se señala la probabilidad de que una descarga atmosférica sobrepase el valor de intensidad de corriente señalado de acuerdo a la ecuación (2). FIG. 10. Perfil de intensidades de corriente crítica ante impactos en un conductor de la fase a lo largo de la Línea Amana-Muscar II 13,8 kV. En la Fig. 11, se presenta la distribución de impactos de rayo para cada uno de los postes de la línea, emitida por la ISBN: 978-980-7185-03-5 P-82 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) herramienta de simulación TFlash v 4.0.22, donde los puntos rojos simbolizan conductores de fase, los verdes conductores de guarda y las líneas rojas y azules representan impactos de rayos de diferentes magnitudes. E. Tasa de Salida Con la información asociada al cálculo estadístico de la tasa de salida de la línea, se construye el gráfico presentado en la Fig. 13. FIG.13. Distribución de las causas que componen la tasa de salida por descargas atmosféricas de la línea II Amana-Muscar 13,8 kV. FIG. 11. Resumen de las ventanas de impactos de los postes de la línea Amana -Muscar II 13,8 kV. Nótese que las vulnerabilidades en apantallamiento se pronuncian en los postes de amarre o retención (Poste N°1, N°2, N°6, N°8 y N°9). D. Escenario No. 3 Al aplicar impactos de descargas atmosféricas cercanos a la línea de diferentes magnitudes de intensidad de corriente, a través de la herramienta de simulación, se pudo determinar mediante la ecuación (8) los picos de voltaje inducidos en los conductores de la línea; las sobretensiones para diferentes magnitudes de corriente pico de rayo se resumen en el gráfico de la Fig. 12 junto con la probabilidad de ocurrencia las mismas sobre cada columna, la línea marrón señala el valor correspondiente al CFO de los aisladores de la línea (190 kV), de esta forma, cuando una sobretensión inducida alcanza este valor existe al menos un 50 % de probabilidad de que falle(n) algún(os) aislador(es). Nótese que de acuerdo a los resultados obtenidos mediante la ejecución de la rutina de cálculo estadístico de la herramienta de simulación TFlash v 4.0.22, se reflejaque la mayoría de las fallas ocurren por impactos indirectos (72,35 %), lo que sugiere que las fallas por sobretensiones inducidas tienen un mayor peso o aporte sobre la tasa de salida por descargas atmosféricas que las fallas por descargas retroactivas o de apantallamiento, esto debido al carácter aleatorio de los impactos de rayo, siendo más probable que en un área determinada un rayo impacte a tierra a que lo haga directamente sobre la línea o sobre su radio de atracción. F. Evaluación de Opciones de Mejora Tras evaluar las opciones de mejora descritas en la metodología de esta investigación se obtuvieron los resultados mostrados en la Fig. 14: FIG. 14. Tasa de salida por descargas atmosféricas de la línea Amana-Muscar II 13,8 kV para las diferentes opciones de mejora. FIG.12. Sobretensiones inducidas por impactos de descargas atmosféricas cercanos a la línea Amana-Muscar II 13,8 kV. Donde las opciones corresponden a las listadas a continuación: 1. Aumento de Capacidad de Aislamiento. 2. Mejora del Sistema de Puesta a Tierra. 3. Corrección del Ángulo de Apantallamiento. 4. Incremento en la Cantidad de Descargadores de Sobretensión. ISBN: 978-980-7185-03-5 P-83 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) Descartando la Opción No. 4 (motivado al hecho de que la adición de descargadores de sobretensión a la línea introduce puntos de fallas al sistema, con lo que aumentaría el número de fallas y el tiempo de detección de fallas), se tiene que la opción N°1 aporta la mejora más significante al rendimiento ante descargas atmosféricas de la línea Amana-Muscar II 13,8kV. G. Propuesta de Ajustes Considerando que los valores de resistencia de puesta a tierra de la Línea II Amana-Muscar 13,8 kV se encuentran fuera de norma, la propuesta presentada comprende la implementación del sistema de puesta a tierra por contrapeso continuo descrito en la opción de mejora N° 2, esto sumado a la sustitución de los aisladores actualmente instalados por unos con mayor capacidad de aislamiento como los descritos en la opción N°1. Opción N°1. Aumento de la Capacidad de Aislamiento – Sustitución de los aisladores actuales por aisladores Clase ANSI C29.13: DS-35; Tipo: Retención; Material: Polimérico; CFO positivo: 300 kV; CFO negativo: 320 kV. Opción N°2. Mejora del Sistema de Puesta a Tierra – Comprende la implementación de un contrapeso continuo a lo largo de la línea. Los resultados obtenidos al simular esta propuesta con la rutina de cálculo estadístico de la herramienta TFlash v 4.0.22 se muestran en laFig. 15 y Fig. 16. FIG. 15. Reporte de cálculo estadístico de eventos al año por poste en la línea Amana-Muscar II 13,8 kV al implementar la propuesta planteada. En la Fig. 15, se muestra la cantidad de fallas al año en cada poste de la línea, indicando con el color azul la predominancia de las fallas por concepto de descargas inducidas (Induced Flashovers). El reporte de texto emitido por la herramienta computacional en la Fig. 16,muestra la cantidad de descargas atmosféricas en la línea según las diferentes causas que las originen, además presenta el total de fallas por cada 100 km de línea (Flashovers/100 km), con lo que se aprecia una reducción de la tasa de salida de la línea Muscar II 13,8 kV debido a sobretensiones originadas por descargas atmosféricas a un 29 % del valor actual. V. CONCLUSIONES La simulación de los escenarios permitió observar en detalle el comportamiento de la línea aérea de distribución en estudio ante los tipos de falla simulados, obteniendo información asociada a las magnitudes de corrientes críticas y sobretensiones inducidas. Con la aplicación de la rutina de cálculo estadístico de la herramienta de simulación TFlash v 4.0.22 se obtuvo la información necesaria para orientar las propuestas de mejora de rendimiento de la línea II Amana-Muscar 13,8 kV ante sobretensiones originadas por descargas atmosféricas. La línea II Amana-Muscar 13,8 kV, se encuentra afectada principalmente por las sobretensiones inducidas, originadas por impactos de rayo cercanos a la línea. La implementación de aisladores con un nivel de CFO de 300 kV en la línea Muscar II 13,8 kV, sumado a la mejora del sistema de puesta a tierra en miras de cumplir con los valores normalizados de resistencia de puesta a tierra, mejora el desempeño de la misma ante sobretensiones originadas por descargas atmosféricas, reduciendo la tasa de salida a un 29 % de la tasa actual. El sistema de puesta a tierra está directamente ligado al desempeño de la línea aérea ante impactos de rayo directos al conductor de guarda. Corregir el ángulo de apantallamiento a 43.02° en postes de amarre y 44.20° en postes de suspensión, resulta la forma más apropiada de disminuir las fallas por impactos de rayo a un conductor de fase en la línea II Amana-Muscar 13,8 kV. La instalación de descargadores de sobretensión en todos los postes de la línea II Amana-Muscar 13,8 kV se lleva a cero la tasa de salida ante sobretensiones originadas por descargas atmosféricas, sin embargo estos representan puntos de falla adicionales en la red, con lo que aumenta el número de fallas y los tiempos de reposición del servicio, por lo que la implementación de los mismos debe analizarse a través de un análisis técnico-económico aparte. REFERENCIAS BIBLIOGRÁFICAS [1] [2] [3] [4] FIG. 16. Reporte de tasas de salida en la línea Amana- Muscar II 13,8 kV al implementar la propuesta planteada. Short, T. “Electric Power Handbook Distribution”, 1966. Chisolm, W y Anderson, J. “EPRI AC Transmission Line Reference Book. 230 kV and Above” Capitulo 6. TerceraEdición. IEEE Std 1410-2004. “IEEE Guide for Improving the Lightning Perfomance of Electric Power Overhead Distribution lines” Anderson, J. G., “Lightning Performance of Transmission Lines, Transmission Line Reference Book, 345 kV and Above”, Electric Power Research Institute: Palo Alto, CA, 1982, ch. 12. ISBN: 978-980-7185-03-5 P-84 6TO CONGRESO IBEROAMERICANO DE ESTUDIANTES DE INGENIERÍA ELÉCTRICA (VI CIBELEC 2015) [5] [6] González, F. “Evaluación Estadística del Comportamiento de Líneas Aéreas de Distribución Frente a Sobretensiones de Origen Externo”. Tesis Doctoral. Universidad Politécnica de Cataluña, 2001. Anderson, R. B., Eriksson, A. J., Kroninger, H., Meal, D. V., and Smith, M. A., “Lightning andThunderstorm Parameters” IEEE Conference Publication No. 236, Lightning and Power Systems, London, pp. 57–61, June 1984. [7] [8] [9] IEEE Std 1243-1997. “IEEE Guide for Improving the Lightning Perfomance of Transmission Lines”. ANSI IEEE C2.“National Electrical Safety Code”,2002. Gómez, Z. “Estudio de los Sistemas de Protección Contra Descargas Atmosféricas y Puesta a Tierra de la Línea San Gerónimo “A” – Santa Teresa N° 2 400 KV”. Tesis de Grado. Universidad De Oriente. 2009. ISBN: 978-980-7185-03-5 P-85



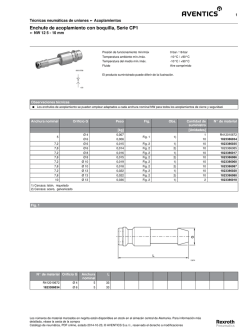

© Copyright 2026