
Simulation software: not the same yesterday, today or
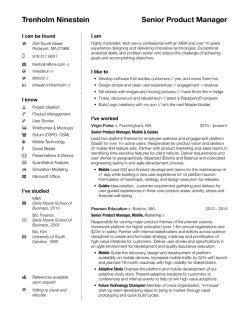
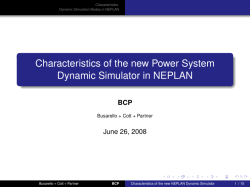
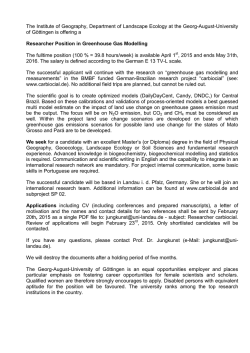
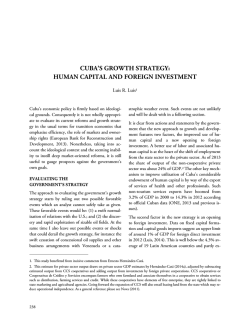
Journal of Simulation (2006), 1–14 r 2006 Operational Research Society Ltd. All rights reserved. 1747-7778/06 $30.00 www.palgrave-journals.com/jos Simulation software: not the same yesterday, today or forever M Pidd* and A Carvalho Lancaster University, Lancester, UK It is probably true, at least in part, that each generation assumes that the way it operates is the only way to go about things. It is easy to forget that different approaches were used in the past and hard to imagine what other approaches might be used in the future. We consider the symbiotic relationship between general developments in computing, especially in software and parallel developments in discrete event simulation. This shows that approaches other than today’s excellent simulation packages were used in the past, albeit with difficulty, to conduct useful simulations. Given that few current simulation packages make much use of recent developments in computer software, particularly in component-based developments, we consider how simulation software might develop if it utilized these developments. We present a brief description of DotNetSim, a prototype component-based discrete event simulation package to illustrate our argument. Journal of Simulation (2006) 0, 000–000. doi:10.1057/palgrave.jos.4250004 Keywords: simulation software; Microsoft.NET; composability; the future Introduction It will be very obvious to readers of this new journal that a computer can be used to simulate the operation of a system such as a factory or call centre, but whether it was so obvious to the pioneers is not so clear. It is clear, though, that when they realized the possibilities they were creative and enthusiastic in developing methods that would harness the emerging power of computers to the improvement of productive systems. When computer simulation began, there were no programming languages in the sense that we understand them today. Instead, the earliest simulation modellers found themselves flipping switches or writing in machine code and, a few years later, writing in assembler; all rather clumsy. More than 50 years later, computer simulation methods are taken for granted in many areas and there are easy-to-use tools that enable people with limited computing skills to develop and run simulation models (Hollocks, 2004). Our aim, here, is to review the developments that occurred in that half century, trying to do justice to the pioneers and to those who have moved things on since then. About 20 years ago, one of us reviewed developments in simulation and linked these to developments in computing (Pidd, 1987), but much has changed since then. Nowadays, computer simulation is rather a broad field with applications in all scientific disciplines: indeed much of climate science is wholly based on simulation models, many of which are impossible to validate in any sense. Simulation *Correspondence: M Pidd, Department of Management Science, Lancaster University Management School, Lancaster University, Lancaster LA1 4YX, UK. E-mail: [email protected] methods are also common in the various sub-disciplines of the social sciences and management sciences. Since this new journal is published on behalf of the Operational Research Society, we focus on simulation as used in OR/MS (operational research/management science)—but there is much more to simulation than this. Within OR/MS, the term ‘computer simulation’ covers discrete event simulation, continuous simulation, system dynamics and agent based modelling. Since we have too little space to cover every aspect of simulation, even in OR/MS, here we concentrate on discrete event simulation. A well-rounded discrete event simulation modeller requires three related skill sets. First, expertise in and knowledge of probability and statistics, since many systems modelled by discrete event simulation contain elements that are best represented stochastically. This does not mean that simulation modellers must be professional statisticians, but they really should be comfortable with statistical variation and probability. Secondly, modellers need expertise and experience in computing, since discrete event simulations are implemented in computer programs. It would be a mistake, however, to assume that modellers require fully developed programming skills in the sense that this would have been meant 20 years ago. As will become clear later in this paper, many, possibly most, discrete event simulations are implemented in modelling packages. These are often known as Visual Interactive Modelling Systems (VIMS) and, although they do require some programming, this consists of small sets of logical statements rather than full programs. Thirdly, and perhaps less obviously, discrete event simulation modellers must be able to model. That is, they must learn 2 Journal of Simulation Vol. ] ], No. ] ] the skills of extracting the essence from a situation, embodying these in a conceptual model and using them once they are implemented in a suitable computer system to draw inferences about the system being simulated. One of us, Pidd, is a management scientist who has been involved with computer simulation for over 30 years. During this period, he has maintained an interest in both the theory and practice of simulation, especially of discrete event simulation; though with more than a passing interest in system dynamics. The other, Carvalho, is an experienced computer scientist who, at the time this paper is written, is close to completing a PhD in computer simulation, as part of which she developed DotNetSim which is described later. Our joint insights form the basis of this paper, which we hope will be of value to people in considering not just the past of simulation but also its possible future. Over the years, a symbiotic relationship has developed between simulation and computing. In general, computing has been ahead of discrete event simulation; that is, simulation modellers have taken up developments that occurred elsewhere in computing. But there have been exceptions to this rule, such as when object orientation first appeared in the simulation programming language SIMULA (Dahl and Nygaard, 1966) and also in the use of graphics for decision support. In general, we consider the strong links between discrete event simulation and developments in computing over the last half century and suggest that, useful though they are, today’s simulation packages may need to be radically rethought if they are to meet users’ future expectations. For a broader treatment of developments in simulation see Robinson (2005) who discusses issues beyond software. Developments in computing and their effect on discrete event simulation It may once have been true that simulation modellers were pleased to find any way to run even a simple simulation model. Anyone who has written a reasonably complex program in a language like FORTRAN or C þ þ knows the feeling of relief when it seems to work properly—and the all too common despair when a bug appears later. Eventually the program will be declared fit for purpose, but behind this will have been many bugs and development problems sorted out one by one, in a laborious process of debugging and verification. Nowadays, the existence of VIMS allows a modeller to take for granted that a simulation model will run once it has been built. Models can be built very quickly, sometimes while the client for the work is watching and taking part in the work. In the early days, a huge proportion of the effort in a simulation project involved getting a model into a computable form, so it could be used. That is; programming, testing and refinement. Nowadays, thanks to simulation tools, the emphasis is on the conceptualization and use of a model to think through options for change or to develop understanding. That is, modern simulation tools have shifted the emphasis from programming and software development to modelling and model use—at least as far as simulation modellers are concerned. Of course, hidden away in the background are the software engineers and developers who provide the tools that have enabled this shift. A quick review of the history of discrete event simulation software Without over-simplifying matters too much, we can consider discrete event simulation software as passing through the following phases. 1. Almost any programming language can be used to write a discrete simulation application from scratch, as long as it supports both numerical computation and logical operation. Thus, people have used FORTRAN, Pascal, BASIC, Modula II, C, C þ þ and the variations around these languages. Since common operations occur in any discrete event simulation, programmers were quick to develop libraries of subroutines and functions that could be re-used. Initially, such re-use was for a single individual or organization, but gradually products such as GASP (described in Pritsker, 1974) and SIMON (Hills, 1965), which were libraries of subroutines, appeared in the market. SIMON, a library of Algol routines, was sonamed because its originator, Robin Hills, intended it to be simple to use—compared to the available alternatives. Today, some simulations are still written by cutting general-purpose code, but probably very few of these are in the commercial world. 2. Since computer programming skills have rarely been widespread, simulation software developers realized that users without proper programming skills could be supported by the development of application packages based around the idea of a flow diagram, sometimes known as a block diagram. Early examples of these were GPSS (described in Gordon, 1962) and HOCUS (Hills, 1971). As originally envisaged, such models would be developed in a two-stage process. First, the user would draw a flow diagram that represented the outline of the logic of the system to be simulated. Secondly, this logic would be translated by the modeller into a command sequence (using punched cards in the early days) that would be read by the flow/block diagram system (eg GPSS) as data. As long as the application was relatively simple, the simulation could then be run. However, such flow diagrams can rarely capture the full logic of a simulation application and further development was needed. Since an experienced modeller could write down a series of GPSS block commands without drawing a diagram, systems such as GPSS came to be regarded as simulation languages and the idea of a GPSS ‘program’ appeared. M Pidd and A Carvalho—Simulation software 3 3. Once the idea of a simulation program as a sequence of high-level commands is accepted, it starts to become sensible to develop full programming languages that incorporate commands that execute operations frequently used in a simulation. In this way, GPSS eventually became GPSS/H (Crain, 1996), moving away from its roots in flow diagrams by adding limited program control constructs. Also employing a block structure, Pegden developed SIMAN (described in Pegden et al, 1990), which included the concept of a simulation experiment, or frame, linked to the simulation model. SIMSCRIPT (Markowitz et al, 1963) and its descendent SIMSCRIPT II.5 (Russell, 1987) also appeared; as did CSL (Buxton and Laski, 1963) and ECSL (Clementson, 1973). With the benefit of hindsight, the queen of these simulation languages was SIMULA (Dahl and Nygaard, 1966), which introduced the concepts now included within object orientation. 4. These language developments were also accompanied by the creation of interactive program generators, of which the best known was perhaps CAPS/ECSL (Clementson, 1982), although the ideas first appeared in Ginsberg et al (1965). These required the user to develop a flow diagram, which was described graphically or in text to the program generator, which then wrote code that would compile and run and, most significantly, could be edited to add those tweaks that were impossible to represent on the flow diagram. It should be noted, though, that editing someone else’s computer program requires advanced skills and some confidence and so these program generators were not widely used. 5. As PCs grew cheaper and more powerful, they also provided inexpensive and high-quality graphical displays. Especially in the UK, simulation software developers were quick to capitalize on this and, building on Hurrion’s work at Warwick University (Hurrion, 1976), Istel developed SEE-WHY (Fiddy, Bright and Hurrion, 1981) and an offshoot of British Steel developed FORSSIGHT (Business Science Computing, 1982). These were Visual Interactive Simulation (VIS) packages that allowed animations of model performance to be displayed on-screen as a simulation ran and permitted the user to interact with the model in a gaming mode. However, they still required the user to write code—typically in FORTRAN. 6. These VIS were quickly followed by VIMS in which the user develops the core of a simulation model by placing and linking icons from an on-screen palette. Detailed event logic is added by allowing the user to write event code in property sheets that are linked to the on-screen diagram. The first such VIMS that enjoyed any success was probably Witness, created by Istel (Gilman and Watramez, 1986), which was quickly followed by many others: including ProModel, Automod and Taylor II. A quick glance at the software on display at conferences such as the Winter Simulation Conference or at the biennial simulation software survey conducted by Jim Swain for INFORMS (Lionheart Publishing, http:// www.lionhrtpub.com/ORMS.shtml) shows that VIMS now rule the roost. Package bloat Hence, simulation modellers have moved from a state in which they were pleased to get any computer simulation to run, even a simple one, after days of tedious debugging. We now find ourselves with a wide range of VIMS well-suited to specific application domains and, by using them, we can quickly develop a simulation model that will run. However, like most software, discrete event simulation packages have begun to show signs of package bloat. That is, the relatively simple idea of a simulation executive that dynamically executes the static logic laid out in event, process or activity code has ended in a situation in which the typical package is, effectively, a simulation modelling and support environment that provides the following: Modelling tools, such as * A graphical modelling environment. * Built-in simulation objects (eg machines, conveyors) with defined properties and behaviour. * Property sheets and visual controls to enable simulation parameters to be set and varied. * Sampling routines and other utilities employed in the model. Tools to execute the simulation, such as * A simulation executive to run a model. * Animated graphics or virtual reality representations to allow a user to view the model state as the simulation proceeds. * Simulation run control to enable the user to interact safely with the simulation as it runs. Tools to support experimentation, such as * Experimental frames that define run lengths, outputs and parameters. * Analysis tools that enable results to be interpreted and presented. * Optimization tools. Links to other software such as spreadsheets, databases and corporate systems. Figure 1 shows a hypothetical but typical simulation package and its various components that provide the above functionality. 4 Journal of Simulation Vol. ] ], No. ] ] Code generators Debuggers, Interpreters and compilers Libraries of prefabricated objects Legend Data Input Analysis (ExpertFit, Sat::Fit, …) Graphical Editor Graphics generators (predefined user-defined graphs,…) (Designing the model layout) Report generators (predefined user-defined reports,…) Output analysis Optimisers (OptQuest,…) 3D representation and animation Rules Editor (adding logic and data to objects and connections) Simulation programming language General purpose programming languages Core application Add-ons External components Simulation engine (running scenarios) Core application Templates (classes of problems) Wizards to generate models Access to external data sources General-purpose packages ExpertFit, Stat::Fit, Oracle, Microsoft Office, ... Figure 1 A typical simulation package currently consists of a core application, and a wide range of add-ons. Hence, modellers expect discrete event simulation software packages to present themselves as huge, monolithic applications that aim to do almost everything. They possess functionalities that are constantly extended by adding wizards, templates, etc in a generalizing–customizing– generalizing development cycle. This has happened because simulation software vendors, like other software suppliers, have been trapped by their own success. It has been easier to add features, however inelegantly done, than to design again from scratch. In this way, most current simulation packages have enough functionality to cope with a large number of problems, but may be an evolutionary dead-end. Most of these packages were designed with a particular application domain in mind, usually manufacturing. However, they have enjoyed success in other areas that could hardly have been imagined by their originators, and their pre-defined object libraries have grown to accommodate this broad range of applications. This approach, however successful, may be reaching its limits and other development alternatives should be considered in order to support robust, easy-to-use, quick-to-develop, quick-to-change and quickto-run simulation software solutions. In doing so, it is sensible to resort to the latest advances in component-based and layered-based paradigms, and integration mechanisms to promote the composition of simulation software solutions from existing or newly developed prefabricated components. A quick review of software development paradigms In order to see a better way forward for discrete event simulation software, it is necessary to quickly review successive software development paradigms. Understanding this explains much of why simulation software has taken its form and also suggests how a different approach might be used in future. The review here begins in the 1970s, when computer programming was an established skill but most programs were developed in languages such as FORTRAN and COBOL, in versions that now seem very crude. The use of such languages led to a crisis in software development in which it became clear that there was a need for standardization and for approaches that ease software development and subsequent maintenance. Theoretical frameworks or paradigms were successively designed to provide programmers with a set of laws, rules and generalizations that enable programs to display desirable properties. Naturally, there are different paradigms for different programming domains as these also target different sets of desirable properties. Our scope is however confined to application software for simulation and hence Table 1 lists some of the desirable properties for simulation software. It should be no surprise, though, that virtually all application software has similar core requirements; that is, to software professionals, many core simulation software requirements are the same as those in other application domains. Hence, it is worth reviewing four programming paradigms, each of which was intended to support the development of software with these properties. 1. Structured programming (Dahl et al, 1972) was the first formal programming paradigm on which others where built. Modularity and its implicit ‘divide and conquer’ M Pidd and A Carvalho—Simulation software 5 Table 1 Desirable properties of simulation software Property Brief description A program should Dependability Ability to deliver the intended functionality when requested without causing danger or damages, resisting external attacks (Sommerville, 2004) and handling error conditions. Ability to provide friendly user interfaces that permit different levels of utilisation, detection and recovery from input errors. Ability to be incrementally built by composition of self-contained units—functions, procedures, modules, components, etc. Ability to run on different configurations, be composed with other programs and to communicate with packages of different vendors Be reliable, available, safe, secure and robust. Usability Modularity Reusability principle were its most important contributions to programming. It advocates techniques to structure the program’s flow control that are still recommended so as to make programs easier to read and to maintain. Structured programs are sets of modules, which are, in turn, sets of procedures or functions. Procedures may invoke themselves or other procedures and functions to manipulate local and global variables. The program runs by passing data through parameters among procedures. Although functions and procedures can be re-used by lifting them from one program and pasting them into another, it remains true that structured programs are monolithic pieces of code developed from scratch or, sometimes, from scavenged code. 2. Functional and logic programming paradigms (Bird and Wadler, 1998) and their combination emerged within the artificial intelligence community in the early 1990s. They led to declarative programming paradigms, that is, they focus on the description of data’s relationships, either mathematically or logically, as a means to approach human modes of thought. Functional programming approaches derive from the Church’s-Calculus (Church, 1941) and, therefore, consist of sets of functions that produce values or other functions, once applied to their arguments. The execution of a functional program deals with the evaluation of expressions and their replacement by the corresponding values. This implies referential transparency, that is, functions must not produce side effects, since it is crucial to guarantee that the application of a function to the same argument always returns the same result. Functional programming originated heavily recursive languages such as Lisp, Miranda and Haskell, which are intuitive but lead to programs that are memory-demanding and slow to run. Logic programming derives from the first-order predicate calculus, hence the outputs of a logic program are inferred from the known facts and the relationships between a set of objects. Prolog is the commonest logic Be easy to learn and operate, adaptable to specific models of work, and recoverable from user errors. Be modularly composed and extendible. Be portable, integrable and interoperable programming language and is used mainly for expert systems. Functional logic programming paradigms combines these two paradigms so that the programming primitives have the power of logical inference, in for example, non-deterministic search and the efficiency of the functional evaluation strategies such as lazy evaluation. ALF, Babel and Curry are examples of functional logic programming languages. 3. Object-oriented programming (OOP) (Booch, 1994; Meyer, 1994) originated with Simula, an Algol-based language that supported discrete simulation. The application of OOP in simulation is demonstrated in Pidd (1995) and is based on the notion of objects, their attributes and the functionalities they provide. An object is a data structure composed of data (attributes) and code (methods) that implement the object’s functionalities. For example, a queue is an object with attributes such as queue name, location and discipline and methods that enqueue and dequeue elements, determine the length of the queue at each state, reverse the queue, etc. Objects interact by invoking methods of other objects, that is, by requesting others to execute the functionalities they provide. An observer service, for example, may be another object that interacts with the queue by invoking its methods to enqueue and dequeue clients and compute performance indicators. Several programming languages implement OO concepts. Some are fully object-oriented such as C# and VB.NET. Others, such as earlier versions of Visual Basic and corresponding subsets (VBA) are not fully OO languages as they do not implement inheritance and offer limited utilization of abstraction and polymorphism. Classes are fundamental to OO programs. A class is an abstraction of an object that defines the attributes and methods of a family of objects. An object is therefore a class’s concretization. For instance, the class Queue is a generalization of all queues and the object ‘Queue for 6 Journal of Simulation Vol. ] ], No. ] ] the Teller A’ is an instance of that class. A class gathers together, in a self-contained unit of code, attribute declarations (properties or field variables) and methods that allow the creation, at runtime, of objects (instances) with all the specified functionality of the class. The class encapsulates all its contents within itself and only exposes the information required for the invocation of its methods. Inheritance mechanisms allow classes to be organized into hierarchies of super-classes and sub-classes. Subclasses inherit the attributes and methods of the superclasses from which they are derived, and may add more attributes and methods, which are then passed to their own sub-classes. For instance, the B and C activities of the three-phase simulation worldview are both activities that share attributes such as name and description, and methods such as those to set and get the common attributes. Hence, B_activity and C_activity classes may be derived from the super-class Activity. In addition, these sub-classes may also have their own attributes and methods: for example, a C_activity has attributes and methods associated with the condition that determines its execution but these are not present in a B_activity, nor in the Activity super-class. Polymorphism allows a method of a super-class (or an interface) to be implemented differently in any of its subclasses. At runtime, the implementation of this method in a sub-class overrides its implementation in the super-class. Thus, this method appears in many forms depending on the context of its implementation. For example, if the super-class Event of a discrete event simulation defines a method for updating the state variables, it is likely that this method has different implementations in each event routine. Also, methods may need to refer to collections of different objects whose types are only known at runtime. Polymorphism allows the definition of generic objects that suit different types and at runtime they will assume the type of the given object. 4. Component-oriented programming extends OOP concepts to provide a framework for constructing programs from prefabricated OO pieces of code (components). A component is a software artefact that is independently deployable, compose-able by third-parties and with no observable external state (Szyperski, 2002). To meet these requirements, components must be self-contained and encapsulated units that, by exposing the functionalities they offer and the needs for their delivery, can be plugged into (and unplugged from) other components. It is important that they are immutable, in the sense that they are abstract definitions and consequently two copies provide exactly the same functionality under the same conditions. Fine-grained components provide limited functionality and typically deal with detailed data structures. Hence, they tend to be specific and dependent on the deployment environment (they may even include operating system basic functionality). Many finegrained components are rather like the FORTRAN subroutines and C functions widely available for generating random numbers: they are small and perform a single, well-defined task. On the other hand, coarse-grained components deal with large-scale data structures and have a high degree of abstraction that makes them generic and adaptable to several deployment environments. 5. Layer-oriented programming (LOP) paradigm applies mainly to the design of system architectures and is concerned with the interconnection of software components. A layered system is incrementally built, layer upon layer (Szyperski, 2002). LOP inspired the OSI reference model (Tanenbaum, 2002) and was first used to develop onion-structured operating systems (Deitel et al, 2003). Each layer receives from the layer immediately below well-defined functionality, which it increments and passes to the layer immediately above. Each layer may be composed of several components. LOP is associated with meta-programs that provide the functionality to interpret, inspect, adapt and extend the structure and behaviour of the underlying software. The metadata (attributes) and computational reflection allow for the dynamic composition of layers of components. This presents the possibility of on-demand software programming (Elfatatry, 2002; Elfatatry and Layzell, 2004) based on the dynamic assembly of software solutions by selecting, negotiating and invoking suitable components, as web services, at runtime. Simulation systems could be constructed with layered structures, for example, by adding layers as shown in Figure 2. This is a pyramid-layered structure (Moses, 2001, http://esd.mit.edu/HeadLine/mosesspeaks. html, accessed 21 March 2005) in which each layer receives from its immediately lower layer the necessary functionality to provide more specific and finer grained functionality. Software developments and their impact on simulation software Early simulation texts (eg Fishman, 1973) stressed that a computer program that executes a discrete event simulation has three main parts as shown in Figure 3. These are firstly, a simulation executive that manages simulation time and ensures that the events of the simulation are executed at the correct time and in the correct sequence. It does this by maintaining an event list, or calendar, into which future events are added and from which events are executed when Specific simulation solution Concretisation Fine-grained functionality ……….. ………… ... Domain-specific simulation template Simulation library of components Simulation development framework General-purpose development functionalities Hardware and operating system functionalities Figure 2 Coarse grained functionality Abstraction Pyramid composition of a simulation system. Simulation executive Logical operations Utilities Discrete event simulation program Figure 3 Composed by analysis Decomposed by syntesis M Pidd and A Carvalho—Simulation software 7 Inside a discrete event simulation program. the correct simulation time is reached. There are many ways in which the calendar and event management can be implemented, but the principles are consistent. Once the concept of a simulation language was established, the executive was provided by the simulation language developer and used by the modeller when developing an application. The second part of Figure 3 is a set of utilities, also provided by the language vendor and used by the modeller for particular applications. The utilities perform common simulation tasks such as random number generation, random sampling from defined distributions, list management and maintenance for keeping track of simulation entities, debugging tools and report generators. To these, the experienced modeller may add his/her own utilities based on the requirements of his/her own application domain. The third part of Figure 3 is the set of routines that capture the dynamic logic and interactions that underpin the operation of the simulation as it proceeds over time. How these are labelled and implemented will depend on the simulation world-view in place (event-based, activity-based, process-based or three-phase) and the programming language in use. It is the task of the simulation modeller to determine what events/activities/processes are required and to program them in a parsimonious way. These events/ activities/processes are controlled by the simulation executive and communicate with it by defined protocols as the simulation proceeds. This well-defined structure is characteristic of the way in which simulation packages and programs were implemented from the late 1960s onwards. Its affinity with structured programming, as introduced above, should be obvious. It is unclear whether the architecture of Figure 3 emerged because it coincided with the introduction of structured programming ideas or whether the obvious structure drove simulation software developers toward structured programming. Certainly, though, the two have been happy bedfellows and continue so to this day. Inside a typical VIMS To demonstrate this continued, apparently happy, symbiosis between simulation programs and structured programming, consider the typical internal organization of a VIMS shown in Figure 4 (taken from Pidd, 2004). It presents a user interface that exploits the API of what-ever operating system is in place (usually a version of Windowst). Within this, the user will be allowed to develop a model, to edit an existing model, to run a model and to conduct controlled experiments. The latter usually allows at least some statistical analysis, and the export of results files in some suitable, external format. Models are constructed by selecting icons that represent features of the system being simulated and these are linked together on-screen, and parameterized using property sheets. This is fine if the objects provided are a good fit for the application. However, the default logic provided by the simulator may be inadequate to model the particular interactions of specific business processes. To allow customization, most VIMS provide a coding language in which interactions can be programmed. Some offer links with general-purpose programming languages (eg Visual Basic). Others incorporate simulation quasi-language logic builders that permit little beyond the assignment of attributes, the definition of if statements, loops and limited access to component properties. Some of the limitations of these languages and their part in VIMS are discussed in Melao and Pidd (2006). 8 Journal of Simulation Vol. ] ], No. ] ] USER INTERFACE model builder & editor simulation engine simulation & application classes generic model Model development Figure 4 Model running analysis & experimentation toolkit Experimentation Internal organisation of a typical VIMS. Underneath the user interface is a generic simulation model that is presented to the user in one of two ways, sometimes both. The most common way, as seen in Witness and similar packages, is that of a machine network in which parts flow from workstation to workstation. For example, a part may go to a lathe, then through a washer, then to an inspection point and then into a shrink wrapper etc. A workstation may well be able to carry out more than a single task and may be able to cope with more than a single type of part. As parts flow through the network, they sit at a workstation for a time, possibly stochastic, often known as the cycle time. As a result of their interaction with the workstation during the cycle time, the parts change state. Parts are routed through the machine network and each machine must be parameterized by the completion of a sheet that specifies its predefined properties. By contrast, systems such as Micro Saint Sharp offer a task network that represents the sequence of tasks through which the main entities of the simulation will flow. Thus, passengers may disembark from an aircraft, may walk to immigration, may be processed in immigration, walk to the baggage hall, etc. Each task requires resources for its completion and tasks may compete for resources. The resources required and the conditions governing the start of the task are specified in a property sheet, along with the consequences of the task. Of course, these two types of VIMS network are equivalent; much as the dual formulation of a mathematical programming problem is equivalent to its primal. That is, with suitable imagination, an application that appears to be a sequence of tasks may be modelled as a machine network and vice versa—however, choosing a horse for the right course can make life much easier. Inside every VIMS is a generic simulation model that is not usually available to the user to edit. In essence, the generic model takes the network diagram as data, much as GPSS was designed to take a series of punched cards that it then interpreted. Thus, if it were thought desirable, a VIMS on-screen network could be replaced by a series of textual commands each of which carries attribute and method data to represent the data of the property sheets. The generic model assumes that simulation entities change state and it reads the network description to define the sequence of those states and the conditions that govern them. Code fragments, in whatever simulation language, are then used to modify the generic model in some way or other. That is, a VIMS provides much of the dynamic logic (Part 3 of Figure 3) needed in a simulation model and this communicates with, and is controlled by, a hidden simulation executive. Likely as not, the generic model and executive will have been written in a structured programming language, although some show signs of object orientation. Although this approach works very well, it does have a couple of significant problems. The first is that an experienced modeller is unable to do much in the way of extending or customizing the VIMS to better fit her own circumstances. Although some packages allow the user to develop her own simulation objects, this is usually very limited—possibly not surprising, since VIMS are sold, primarily, on the basis of ease-of use. However, while providing software that is promoted as easy to use, the vendors must also provide enough support and flexibility for the VIMS to be used in applications of some complexity and scale. As discussed earlier, this has led to package bloat, which is the second problem with this approach. There is another way The past and the current evolution of simulation software lead us to expect that simulation software will continue to rely on the latest advances in computer science to support computer simulations of increasing size and complexity. Progress achieved in areas such as programming paradigms, integration of hardware and software platforms, networks and communications and the continuous advance of internet technologies is crucial to the future of simulation software. Figure 5 summarizes the parallel evolution of computing and simulation software. Away from simulation, it seems that computing is now evolving toward ‘on demand software’ or instant assembly of software, in which software builders ‘rent and pay per use’ only the functionality required at runtime. It is worth considering whether simulation software might similarly evolve in the direction of the just-in-time assembly of simulation solutions. This commercial demand for customized solutions may well force current simulation packages to be restructured so that each user gets exactly the functionality a solution needs or, even better, the user gets the capability to produce the functionality a solution needs. Doing this will require simulation software that fully complies with object-oriented, component-oriented and layered-oriented programming paradigms, as these support on-demand customization. Looking further ahead, simulation software might evolve toward on-demand component assembly and use based on an open market of components. In this, software solutions M Pidd and A Carvalho—Simulation software 9 On Demand Software Layer-orientation Distributed computing Component-based Component-orientation Object-orientation Structured programming VIMS Interactive and graphical computing High level languages Machine languages Packaged Portable Computers Computing Figure 5 Simulation software Machine Oriented Parallel evolution of computing and simulation software. would be built by modellers who select and assemble at runtime the functionality needed for the specific applications by negotiating with those who develop and publish simulation software components as web services. Some existing attempts Progress in this direction has already begun. The ProModel Process simulator (ProModel Corporation, 2005, http:// www.promodel.com/products/processsimulator, accessed 16 December 2005) is an example of a simulation package that interfaces with another software tool, in this case Microsoft Visiot. Visio is used to provide a graphical template in which a business process model may be developed. In essence, it allows the machine-based view of ProModel to be presented as if were a task network, this being much more useful for business process simulation modelling. These Visio-derived models are then compiled into an appropriate format and run by the ProModel simulation engine. While running a model, the ProModel runtime environment and its animation capabilities replaces the Visio modelling environment. The simulation results are displayed in the ProModel Output Viewer 3DR in a variety of graphical and tabular formats. These can be saved in text formats and opened in generic applications such as Microsoft Excel. As usual, what-if analysis is then available and different scenarios can be saved. This Visio-based graphical interface highlights the trend for developers to integrate their simulation engine with generic software in order to leverage its usability by compliance with human–computer interaction ‘standards’. This is certainly an improvement but it only applies to the modelling input interface. The integration of the Visio modelling environment and the simulation engine consists of a black-boxed compilation into a file, which is later automatically input into the simulation engine. The simulation engine and the output interface are still specific and therefore not changeable by the builder or the user of the simulation package. The user can, however, open the results files in other applications for further analysis. Micro Saint Sharp (Micro Analysis and Design Inc, 2004a,b, http://www.maad.com/index.pl/whats_new#mss, accessed 16 December 2005; http://www.maad.com/index.pl/micro_saint, accessed 22 April 2006) is a second example of a move towards component-based customization. It succeeds the earlier Micro Saint product and adopts a similar task network as its graphical modelling template, but uses C# as its modelling and programming language. The C#-based logic builder enables users to define the process logic and dynamics using a subset of this generic programming language. User-defined functions can then be written within the package to extend its capabilities. Perhaps because C# is so powerful, Micro Saint Sharp handles only a restricted subset of C# programming language with limited OOP features. However, built-in classes, such as Model and Task, are provided and have their own built-in functions. The user may code methods for responding to events, that is, beginning and ending effects. New objects with properties, that is containers of field variables, may be created by resorting to an object designer. But proper inheritance is unavailable and polymorphism is limited to variant variables. Micro Saint Sharp is based on Microsoft’s .NET framework and uses this to offer communication modules that simplify the access to external data by providing built-in connectors for Excelt, Sockets, ADO, Text Files, ConsoleApplications, and Web Sites. Connectors to specific applications can be created in C# by resorting to the networking classes and interfaces of .NET. A ‘Plug-in Framework’ is also provided to install user defined addins. This framework contains the signatures of the interfaces the user has to implement in order to attach a DLL file written within the .NET framework. Data exchange with other applications is also supported through TXT and XLS 10 Journal of Simulation Vol. ] ], No. ] ] Built-in frame works Tailored Simulation application Add-ins Development tools HighMastTM .Net Framework Simulation Class Library Base Simulation engine Operating System Hardware Framework Class Library General data structures Integration Communication … Basic Infrastructure Editors, Debbugers, CLR, …. Figure 6 HighMastt infrastructure and composition. file formats for input and output. Thus, the core Micro Saint Sharp simulation application can be augmented with other software that is .NET compliant. HighMast, Highpoint’s Modelling And Simulation Toolkit, is a .NET-based modelling and simulation framework (Bosh, 2003, http://www.highpointsoftware.com/highmast.htm, accessed 7 October 2003) that supports the gradual development of software applications for running discrete-event and continuous simulation systems. It sits on top of the .NET framework using a layer-oriented programming paradigm as shown in Figure 6. Unlike Micro Saint Sharp, HighMast is a source-codebased platform, but it also uses the .NET environment’s underlying conceptual principles and relies on its integration and communication capabilities to provide a platform for the development of tailored stand-alone and distributed simulation applications. Thus, it relies on object-oriented principles, component-based development paradigms and dynamic binding mechanisms to allow simulation applications to be built in layers of software. Users may build specific simulation software solutions by integrating appropriate software packages, multi-lingual components and web services with a simulation engine and pre-built frameworks. Users can alter prefabricated components, write new ones and assemble the whole package by using general-purpose programming languages. The user’s tailored simulation application can, in its turn, be constituted as a web service available for other applications. HighMast itself is coded in C# and consists of a foundation simulation library and a base simulation engine. The foundation simulation library includes classes that implement simulation related features such as distribution functions, event generators, resource management and graph traversing. The base simulation engine consists of a model class and an executive class implemented separately. The executive class runs the model by handling synchronous events (event-based simulation), and detachable or batched events (process-based simulation) and committing or rolling back the transition of each model state. HighMast provides tools and data structures to facilitate the integration of third-party components. Examples include tools for database manipulation, graphic generators and reporting allow the retrieval and display of externally sourced data. Other tools ease the run-time plugging of self-documenting components. Other techniques and microframeworks may become available as add-ins that can be installed according to the user’s needs. Statistics logs, multirooted dictionaries of user-specified data structures and modelling expressions, instant snap-shot of the current running state, tree or tabular representation of object hierarchies and handlers of compiled queries at run time are already available. Its source-code and layer-based approach enables the development of frameworks for particular application areas. HighMast frameworks are in development for modular supply chain models, bank teller models and product or service transformation models. These three examples of current developments in commercially available simulation packages illustrate a concern to ease the task of integrating simulation software with widely used tools such as Visiot and Excelt. In the case of the ProModel Process Simulator, this integration is limited to the presentation of a friendlier graphical modelling template that provides data to the underlying ProModel simulator. This is useful, but much more can be done. Micro Saint Sharp and HighMast both go much further than this, being designed to exploit Microsoft’s component-based .NET framework and, thereby, supporting aspects of extendability and plug and play. This allows the simulation package itself to be based on an assembly of components and permits the user to integrate other .NET software to meet the requirements of a particular application. This is increasingly important as the pressure to produce customized solutions in shorter time increases further. Figure 7 shows a vision for future simulation software in which, rather than continuing the addition of extra functionality to existing packages, vendors and others pursue a different route. In this vision, a core simulation application is built to support its linkage to other software components through a defined architecture. Approaches such as that of the ProModel Process Simulators use of Visiot are merely a continuation of the current mode of simulation software development. There was no attempt to re-design the underlying simulation package, but the link to Visiot (which is itself customisable) allows the general package to present itself as more suitable for business process modelling than manufacturing, which was the original application domain of ProModel. Micro Saint Sharp moves further towards the ideal scenario, as its core application was re-designed within the .NET framework so as to take advantage of objectoriented and component-based programming paradigms. M Pidd and A Carvalho—Simulation software 11 TM HighMast Micro Saint Sharp Process Simulator Past • • • • • Huge monolithic applications Specific software development tools Customisation by addition of the features needed at the moment Slow and complicated maintenance, expansion, customisation and utili sation ……………………….. Figure 7 Ideal Future Current experiences • • • • • • • • • Base simulation frameworks and libraries of tools Customisation by derivation of specialised tools Generic and specialised development environments Different levels of usage Easy to learn and easy to use Easy expansion by derivation Run fast Maintenance confined ……………………….. Timeline of the past, current and ideal approaches to the development of simulation software. Its approach is based on these programming paradigms and their implementation in the powerful C# language and enables easier customization and interoperability with other applications, Additional features are loaded only if required; and new features can be written in C# and attached to Micro Saint Sharp as DLLs. Also, the built-in tools to interoperate with other applications can be extended by resorting to a ‘Plug-in Framework’ based on the networking classes and interfaces of .NET. This hugely increases the capability to connect several packages, including those for simulation, and those to model and run distributed systems. In addition, it provides a C#-based logic builder that allows the user to add more complex logic to be added to the models. This is a very restricted subset of C#, but logic that requires more powerful programming primitives can be implemented in C# and invoked as DLLs. HighMast, moves even closer towards the ideal scenario. It is really a development framework that derives from the Microsoft .NET framework and lies above it; that is, its vertical architecture promotes the generalize–specialize development cycle. Theoretically, further specialization can be built on the underlying frameworks. Their object and component orientations allow simulation tools to be derived from foundation libraries of tools to provide the functionality required by a simulation model. This allows computingsavvy users to produce the functionality each simulation model requires, by combining and altering the existing source-coded tools. HighMast offers event and processbased simulation executives, but all varieties of simulation worldviews can be implemented. Interoperability across computers, packages and programming languages is avail- able through the Microsoft .NET framework. HighMast implements an entirely new approach to the development of simulation software applications. Theoretically, it is very close to our ideal scenario, but does not support the dynamic selection and assembly of components needed for ondemand simulation. DotNetSim: exploiting these new technologies much further Our work with the DotNetSim prototype exploits the Microsoft .NET integration philosophy for the progression of simulation software along the time line toward our ideal scenario. The idea is to explore how far the new integration mechanisms can pull DES modelling and simulation software toward fully object-orientated components that cross programming languages, packages and platforms and link them in a single application that might be deployed as web services. This approach is investigated across the entire requirements of a simulation application package including user interfaces, simulation executives and output analysis. This focuses on two main development issues: 1. Data exchange between distinct software development tools through the instantiation of objects to apply the OOP paradigm and replace the current creation of intermediate files and associated format conversions. 2. The integration of powerful simulation engines with widely used packages in an architecture that supports the straightforward modification of modelling and simulation environments. 12 Journal of Simulation Vol. ] ], No. ] ] Description of events and inter-event relationships (Excel, Word, PowerPoint, Project , Access, ... Web service Figure 8 Modelling Environment Diagram Modelling data Model description Simulation Engine C# Output Analysis Data Analysis Report generators Report Generators Additional components executive. It reads the model’s logic by instantiating the Visio modelling environment, runs the event-based simulation and returns the simulation results to Excelt for analysis. It can also be deployed as a web service to which the model’s logic is remotely input. The output analysis is an Excel template that is instantiated by the simulation engine to output the simulation results as they are produced. It implements a set of VBA components to analyse and report the simulation results. Excel Visio Overview of the DotNetSim functional structure. The DotNetSim project addresses three major fields and their inter-relationships: discrete event modelling (using event graphs; Schruben, 1983), integration technologies (using .NET) and discrete event simulation in a functional structure shown in Figure 8. It is important to realize that the three coarse-grained components of the prototype could be substituted by others that deliver the same functionality, although with different internal operations—for example, representing alternative simulation worldviews. For example, the prototype graphical modelling environment emulates Schruben’s event graph methodology for simulation modelling. However, other methodologies such as activity cycle diagrams, Petri nets or control flow graphs could substitute for it. If required, the same approach could be used to develop different graphical modelling environments to suit particular application domains, such as manufacturing. The prototype graphical modelling environment that supports event graphs is based on Microsoft Visio 2003t. Event graphs are drawn by the user, or generated automatically from Excel-based lists of attributes given the stencil’s modelling notation. That is, the prototype allows models to be specified graphically or via Excel tables and each input mode can generate a model representation in the other. Modelling data are stored in relational tables associated with simulation events and their inter-relationships and can be reported in Wordt, Excelt and PowerPointt documents. This list could easily be extended so that the model’s logic and dynamics, and the data reporting can be generated or displayed within a wider range of .NET compliant applications. The DotNetSim graphical modelling environment uses specially developed VBA components to link together the different Microsoft applications by instantiating one application from within others. This supports bi-directional data exchange in order to create the stencil’s modelling notation, and to capture the models’ application logic and its dynamics. The simulation engine consists of several C# and VB.NET components that implement an event-based simulation Some lessons from DotNetSim We have reviewed the history of developments in discrete event software and have pointed out the dependence of most existing software on procedural programming approaches that have, in other computing domains, been replaced by paradigms that employ components. The working DotNetSim prototype illustrates the way that a defined component-based architecture, Microsoft’s .NET framework in this case, can support an approach to the development of simulation packages that is very different from that evident in much contemporary simulation software. Rather than aiming at a monolithic and highly integrated application, it is deliberately assembled from a small set of coarse-grained components—each of which is composed of finer grained components. For the software developer this has several advantages. First, each of the components can be substituted by others that offer the same interfaces and external functionality. For example, the Visiobased event graph modelling component could be replaced by another event graph environment developed in some other configurable graphical system that is .NET compatible. Alternatively, a different modelling approach (such as Petri nets or activity cycle diagrams) could be developed in Visiot. In doing so, there is no need to change the simulation engine or output analysis component. Likewise, the event-based executive could be replaced by one based on a different simulation worldview and could be written in .NET-compatible languages other than C# and VB.NET— again without the need to alter the graphical front end or analysis back end. Hence, the system can be customized to meet the preferences of different customers. In like manner, other components could be added to the three described here so as to provide extra functionality. Examples might be links to other corporate software or to optimization or statistical packages. These can be added only if required, can be charged separately, and the customer need not buy (or even rent, in the case of a web service) something that is not needed. In this way, vendors can respond to as yet unknown requirements of the type shown at the right-hand end of Figure 7. That is, DotNetSim prototypes an approach that is designed for extension and substitution when that is necessary and this can be done without a performance penalty. M Pidd and A Carvalho—Simulation software 13 Prototype systems such as DotNetSim are, however, somewhat complex to alter or to extend. In this, though, it is no different from existing software—except that, being component-based from the ground up, unexpected side effects should be few if the original components and their substitutes are properly defined. Its mode of construction suggests that, as proposed in Melao and Pidd (2006), three classes of developers might use something like DotNetSim. The first, and most experienced, are the component developers who code these components and guarantee their functionality within the agreed architecture. They make money by selling and maintaining the components that they build. System integrators compose the second group, and they take the components and assemble them so as to produce and sell a system that is suited to particular problem domains—such as manufacturing, call centres, healthcare or whatever. They make money by selling application-specific packages that, much like existing VIMS, are simple to use in defined domains. Finally, there are the end users, who wish to use the resulting product to deliver solutions in their application domain. They are not much interested in the underlying technologies but in customizable software that they can easily tailor by acquiring only the functionality needed by their current simulation work. Hence, we argue that simulation software developers must prepare for a world in which users expect software to be provided as an on-demand service. This will require developers to re-write their products as a set of components that are linked as required for particular applications. Doing this and making money, while retaining their existing users and maintaining their existing products will be difficult, but not doing so will, we suggest, open the market to new entrants who are prepared to operate in this way. References Bird R and Wadler P (1998). Introduction to Functional Programming using Haskell. Prentice-Hall Series in Computer Science: Upper Saddle River, NJ. Booch G (1994). Object-Oriented Analysis and Design. BenjaminCummings: Redwood City, CA. Bosh P (2003). Simulations on .NET using highpoint’s HightMastt Simulation Toolkit, Highpoint Software System, LLC, Available online. Business Science Computing (1982). FORSSIGHT User Manual. Business Science Computing: Sheffield. Buxton JN and Laski JG (1963). Control and simulation language. Comput J 5: 194–199. Church A (1941). The Calculi of lambda conversion. Princeton University Press: Princeton. Clementson AT (1973). The Extended CSL. University of Birmingham, Birmingham. Clementson AT (1982). Extended Control and Simulation Language. Cle. Com Ltd: Birmingham. Crain RC (1996). Simulation using GPSS/H. In: Charnes JM, Morrice DJ, Brunner DT and Swain JJ (eds). Proceedings of the 1996 Winter Simulation Conference; 8–11 December 1996. San Diego, CA. Dahl O-J and Nygaard K (1966). Simula—an Algol-based simulation language. Commun ACM 9(9): 671–678. Dahl O-J, Dijkstra EW and Hoare AR (1972). Structured Programming. Academic Press: New York. Deitel HM, Deitel PJ and Choffnes DR (2003). Operating Systems. 3rd edn. CA: Prentice-Hall. Elfatatry A (2002). Service oriented software: a negotiation perspective. PhD thesis, University of Manchester Institute of Science and Technology. Elfatatry A and Layzell P (2004). Negotiating in service-oriented environments. Commun ACM 47: 103–108. Fiddy E, Bright JG and Hurrion RD (1981). See-Why: interactive simulation on the screen. Proc Inst Mech Eng C293_81: 167–172. Fishman GS (1973). Concepts and Methods of Discrete Event Digital Simulation. John Wiley and Sons: New York. Gilman A and Watramez RM (1986). A tutorial on SEE WHY and WITNESS. In: Wilson JR, Henriksen JO, Roberst SD (eds). Proceedings of the 1986 Winter Simulation Conference; 8–10 December 1986. Washington, DC. Ginsberg AS, Markowitz HM and Oldfather PM (1965). Programming by Questionnaire. RM-4460-PR, The RAND Corporation: Santa Monica, CA. Gordon G (1962). A general purpose systems simulator. IBM Systems J 1: 18–32. Hills PR (1971). HOCUS. P-E Group. Egham: Surrey. Hills PR (1965). SIMON—a simulation language in Algol. In: Hollingdale SM (ed). Simulation in Operational Research. English Universities Press: London. Hollocks BW (2004). Still simulating after all these years— reflections on 40 years in simulation. In: Brailsford SC, Oakshott L, Robinson S and Taylor SJE (eds). Proceedings of the 2004 Operational Research Society Simulation Workshop (SW04) pp. 209–222, Operational Research Society: Birmingham. Hurrion RD (1976). The design use and required facilities of an interactive visual computer simulation language to explore production planning problems. PhD thesis, University of London.. Markowitz HM, Hansher B and Karr HW (1963). SIMSCRIPT: A simulation programming language. RAND Corporation RM3310-pr 1962. Prentice-Hall: Englewood Cliffs, NJ. Melao N and Pidd M (2006). Using component technology to develop a simulation library for business process modelling. Eur J Opl Res 172(1): 163–178. Meyer B (1994). An Object-Oriented Environment: Principles and Application. Prentice-Hall: Santa Barbara, CA. Micro Analysis and Design Inc (2004a). Introducing Micro Saint Sharp Version 1.0—The Sharpest Idea in Simulation, Available online. Micro Analysis Design Inc (2004b). Micro Saint Sharp: everything you need in simulation, Available online. Moses J (2001). Pyramid structures and the art of decomposition, Available online. Pegden CD, Shannon RE and Sadowski RP (1990). Introduction to simulation using SIMAN. McGraw-Hill: New York. Pidd M (1987). Developments in discrete simulation. Asia-Pacific J Ops Res 4(2): 187–200. Pidd M (1995). Object orientation, discrete simulation and the three-phase approach. J Opl Res Soc 46: 362–374. Pidd M (2004). Simulation worldviews: so what? In: Ingalls RG, Rossettti MD, Smith JS and Peters BA (eds). Proceedings of the 2004 Winter Simulation Conference; 5–8 December 2004. Washington DC. Pritsker AAB (1974). The GASP IV Simulation Language. John Wiley & Sons: London. 14 Journal of Simulation Vol. ] ], No. ] ] ProModel Corporation (2005). Process Simulator 4, Available online. Robinson S (2005). Discrete-event simulation: from the pioneers to the present, what next? J Opl Res Soc 56(6): 619–629. Russell EC (1987). SIMSCRIPT II.5 programming language. CACI: La Jolla, CA, USA. Schruben L (1983). Simulation modeling with event graphs. Commun ACM 26(11): 957–963. Sommerville I (2004). Software Engineering, 7th edn. AddisonWesley: Harlow. Szyperski C (2002). Component Software. Beyond ObjectOriented Programming, 2nd edn. Pearson Education Limited: London. Tanenbaum A (2002). Computer Networks, 4th edn. Pearson Education, Inc.: Upper Saddle River, NJ. ;



© Copyright 2026