
Lj ANALES - Universidad Metropolitana de Caracas
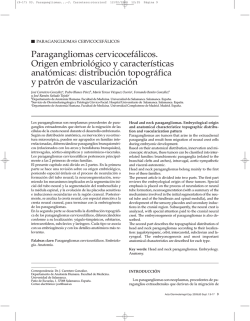
Ljr17 ANALES de la Universidad Metropolitana Identificación de un evaporador de doble efecto empleando redes neuronales Pedro A. Teppa G. Escuela de Ingeniería Eléctrica Universidad Metropolitana José Ferrer Departamento de Procesos y Sistemas Universidad Simón Bolívar En el presente trabajo es resuelto el problema de identificación de una planta práctica dinámica, no lineal, y multivariable, de fundamental importancia en la industria petroquímica, como es el evaporador de doble efecto, a través de redes neuronales artificiales multicapas. El modelo de identificación propuesto es una extensión al caso multivariable de modelos empleados en la situación escalar (una entrada-una salida). El mismo consta de filtros lineales transversales y redes neuronales multicapas como subsistemas, de manera que las relaciones entradasalida del identificador pueden expresarse a través de ecuaciones diferencia no lineales de parámetros desconocidos. La parametrización propuesta permite la aplicación de técnicas de gradiente, para efectuar la actualización de los pesos de la red a lo largo del gradiente negativo del error entre la(s) salida(s) de la planta y la(s) salida(s) del modelo identificador. I. Introducción El procedimiento de identificación de sistemas lineales ha sido tratado con éxito por medio de la respuesta en frecuencia, respuesta al impulso, función de transferencia y métodos de espacio de estado [10]. Sin embargo, los sistemas no lineales no han sido beneficiados con una teoría general de identificación, debido a que las técnicas tradicionales de modelaje: series de Volterra, Wiener, Uryson y Barret, no han contado con un éxito comparable al caso lineal, en aplicaciones prácticas, debido a su complejidad [5]. Segun el teorema de Stone-Weierstrass [3], se demuestra que las redes neuronales multicapas pueden representar relaciones no lineales arbitrarias con bastante precisión, por consiguiente, puede pensarse en ellas como componentes de un modelo de identificación. Narendra y Parthasarathy [5,6,7] proponen varios modelos para la identificación de sistemas dinámicos, no lineales, con una entrada y una salida (SISO), compuestos de filtros transversales y redes neuronales multicapas como subsistemas, de manera que la relación entrada-salida puede describirse a través de ecuaciones de diferencias no lineales, con parámetros desconocidos. En el presente trabajo se extienden los modelos de Narendra al caso multivariable [12]. La parametrización del modelo de identificación es tal, que permite la aplicación de leyes de actualización de pesos del tipo de gradiente, concretamente, el método "steepest 79 u 71 de la Universidad Metropolitana descent". Además de la no existencia de una teoría general para la identificación de sistemas dinámicos no lineales, se tiene un interés económico en el desarrollo de modelos para procesos químicos complejos. Actualmente, el costo para desarrollar un modelo es altamente significativo (75% de los gastos en un proyecto de control avanzado [21), por tal motivo, teorías de identificación como la propuesta, que permiten expresar las características no lineales y dinámicas de un proceso multivariable complejo, de una manera eficiente, a bajo costo, además de no requerir de un conocimiento profundo de la dinámica de la planta o proceso a controlar, son bastante atractivas. El artículo está organizado de la siguiente manera: la sección II trata de la descripción de la planta empleada en la identificación, la sección III de la arquitectura de la red neuronal, mientras que la sección IV describe el proceso de identificación del evaporador de doble efecto. Finalmente, la sección V ilustra algunos de los resultados obtenidos. II. Descripción de la planta La concentración de una solución diluida mediante la evaporación del solvente es un proceso muy importante en la industría petroquímica, así como en la fabricación de azúcar, producción de alúmina y manufactura de papel. Aplicaciones típicas de un evaporador son la concentración de hidróxido de sodio, licores, jugos de frutas, etc. El agua es el solvente empleado en la mayoría de estos casos [1,9,11]. El evaporador empleado, ilustrado esquemáticamente en la figura 1, consiste esencialmente de un tubo vertical corto en el primer efecto y un tubo largo vertical de circulación forzada en el segundo efecto. El segundo efecto posee adicionalmente un separador y un condensador, el cual se mantiene a la presión de operación deseada mediante un expulsor de vapor y un controlador de presión. Los gases no condensables que entran con la solución de alimentación y se acumulan en el segundo efecto son purgados continuamente del sistema. La tasa de purgado es controlada por un transmisor local de presión diferencial de vapor y finalmente, la concentración en cada efecto es monitoreada mediante refractómetros. El modelo matemático no lineal del evaporador de doble efecto que se empleará en el problema de identificación usando redes neuronales es descrito por el siguiente conjunto de ecuaciones diferenciales y algebraícas [1,11]. dW1 F-B1-01 (ec. 1) dC1 _ F Cf + Cl (01- F) (ec. 2) dt dt dhl Q1 + F(hf - hl) - 01(Hol - hl) - Ll W1 dt (ec. 3) dW2 _ B1 - B2 -02 (ec. 4) dt 80 W1 W1 ANALES TI de la Universidad Metropolitana dC2 _ Bl(C1 - C2) + 02 C2 dt W1 (ec. 5) Q1 =U1A1(Ts1 - T1) (ec. 6) Q2 = U2 A2(T1 - T2) (ec. 7) Tsi _ S(Hsi + 32) + Usl Al T1 S + Usl Al (ec. 8) 01 = Q2 (ec. 9) Hol-hs2 02 _Q2 + Bl(h1 - h2)+ X Bl(C2 - C1)- L2 Ho2 - h2 + XC2 (ec. 10) x = ah2 ac2 (ec. 11) H = 1066 - 0.4 T (ec. 12) h=-32+T (ec. 13) En la implementación, controladores del tipo PI son incluidos de manera de impedir cambios instantáneos en las variables W1 y W2 y así tener un modelo más realista y estable de la naturaleza del proceso. Por lo que ecuaciones del tipo 1 m = Kc [ e +--,f dt] (ec. 14) deben ser incorporadas al modelo, donde m y e son la variable manipulada y el error, Kc y Ti son las constantes proporcional e integral del controlador. Las variables manipuladas a utilizar serán B1 y B2. Vecto 03 Tip - Agua de Enfilan e nto ...., 01 Vapor S fili o hip Ali mentación Condensado 111 El Producto — ® 1.. O Concentrado 132,02,72 Figura 1. Evaporador de doble efecto. 81 U 71 ANALES de la Universidad Metropolitana Los nombres de las variables, descripción y unidades aparecen en la tabla 1 y los subíndices empleados en la tabla 2. El modelo del evaporador puede describirse por la representación en espacio de estado por variables físicas siguiente: -eh= f( x, u, p) dt (ec. 15) y=g(x,u,p) (ec. 16) donde: x = [W1, Cl, hl, W2, C2]T ; vector de estado, u = [S, B1, B2]T; vector de control, p = [F, Cf, hf]T; vector de perturbación, y = [W1, W2, C2]T; vector de salida, f y g son funciones no lineales. dW1 = (B 1 , F) dt dt = f (W C F C) (ec. 18) dhl = f3 (W h F h ) dt (ec. 19) dW2=f (B B ) 4 2 dt (ec. 20) dC2 = f (W , C , F, C2, B i ) dt $ (ec. 21) , f= 82 (ec. 17) f2, f3, f4, f3] T Lj71 ANALES de la Universidad Metropolitana Tabla 1 Variables y Descripción VARIABLE DESCRIPCIÓN UNIDADES A pie2 Kg/min Area de transferencia de calor Flujo de salida de los efectos Concentración Flujo de alimentación Entalpía de vapor Entalpía de líquido Pérdida de calor Tasa de evaporación Tasa de transferencia de calor Flujo de vapor Temperatura Coeficiente de transferencia de calor Peso del líquido O S U Lbs/min Btu/lb Btu/lb Btu/min lbs/min Btu/min lbs/min Btu/(CF)(pie2)(min)) Lbs Tabla 2 Variables y Descripción SUBÍNDICE 1 2 o1 s1 s2 si DESCRIPCIÓN Se refiere al primer efecto Se refiere al segundo efecto Se refiere a la alimentación Se refiere al vapor producido en el primer efecto Se refiere al vapor de entrada en el primer efecto Se refiere al vapor de entrada en el segundo efecto Se refiere al vapor de caldera III. Arquitectura de la red neuronal Una red neuronal artificial (RNA) está formada por múltiples unidades de procesamiento elementales denominadas neuronas, donde cada una posee varias entradas y una sola salida que se expande a fin de servir como entrada a otras neuronas. El diagrama de bloques de una neurona típica se muestra en la figura 2. La salida de cada neurona es una función no lineal de la suma pesada de las entradas. Las RNA poseen la ventaja de mejorar su desempeño mediante el aprendizaje. Este último consiste en el ajuste de los pesos de las neuronas para alcanzar una relación entrada-salida deseada. Las características de cualquier RNA son definidas por la función de activación no lineal escogida para las neuronas (ver h(.) en figura 2) así, como la arquitectura de interconexión. En este trabajo se emplean redes neuronales del tipo multicapas.Estas 83 u71 de la Universidad Metropolitana consisten en capas de neuronas cuyas salidas neuronales se conectan a traves de enlaces pesados con las entradas de la capa siguiente. La función de activación no lineal es usualmente escogida de la clase sigmoidal. 1 X. i n Figura 2. Diagrama de bloques de una neurona típica. IV. Identificación El problema de identificación consiste en la selección de un modelo de identificación con una parametrización adecuada, para luego ajustar sus parámetros con el objeto de optimizar un funcional basado en el error entre la salida de la planta y la salida del modelo identificador. La relación no lineal que caracteriza la planta se asume que pertenece a una clase conocida Qen el dominio de interés. La nomenclatura anterior se emplea para denotar las clases de funciones generadas por una red que contiene N capas (con N+1 grupos de neuronas que incluyen una capa de salida, N-1 capas escondidas y i,i,...,ineuronas). La estructura del modelo de identificación se escoge de manera que sea idéntica a la de la planta como indica la figura 3, donde IS representa un muestreador ideal con período de muestreo definido por T, su propósito es discriminar las entradas y las salidas del evaporador debido a que el modelo de identificación está basado en ecuaciones diferencia no lineales. Las líneas gruesas reflejan la naturaleza multivariable del proceso y las dobles líneas enfatizan su característica no lineal. u(t) EV APOR A DOR S IS Yp(k) RED NEURON AL u( k) ihn(k) e(k) ALGORITMO DE APRENDIZAJE Figura 3. Esquema general del proceso de identificación 84 Lj ANALES 71 de la Universidad Metropolitana El objetivo es aproximar la función no lineal f, ver ecuación (15), mediante el ajuste de los pesos de la red de manera que el error e(k) = yp(k) - ym(k) tienda a cero asintóticamente, o sea e (k)= O. El proceso de identificación se establece en la figura 4. El evaporador de doble efecto caracterizado por: x(k+1) = f[W1p(k), C1p(k), h1p(k), W2p(k), C2p(k), S(k), B1(k), (ec. 22) B2(k), F(k), Cf(k) ,hf(k)11-, se quiere aproximar por x(k+1) = [W1p(k), Clp(k), hlp(k), W2p(k), C2p(k), S(k), Bl(k), B2(k), F(k), Cf(k) ,hf(k)]T, (ec. 23) x(k+1) = [W1p(k+1), Clp(k+1), hlp(k+1), W2p(k+1), C2p(k+1)]T, (ec. 24) x(k + 1) = [W1m(k+1), Clm(k+1), hlm(k+1), W2m(k+1), C2m(k+1)]T, (ec. 25) donde: Y por su parte f y f : IR11 ---> . Fce htxt) cf0) W1 (t) W2(t) C1 (t) C2(t) hi (t) S(t) B1(t) EVA PO RA DOR B2(t) ei(k)• i=1 ..5 IS IS IS S(k) B1 (k) B2 00— F(k) RED hf(k) e(k) Algoritmo de adaptación ,Cf(k) f W1 m(k) W2rn k) C1 m(k) C2m(k) hl m(k) Figura 4. Identificacion del evaporador 85 - u71 ANALES de la Universidad Metropolitana El funcional a optimizar se define como un promedio del error cuadrático mediante N 1 J=— z_, e2(k) (ec. 26) 2N k=0 pero 5 e2 (k) = (ec. 27) e3(k) i=1 donde el (k)= W l p(k) - Wl m(k) (ec. 28) e2(k)= Cl p(k) - C 1 m(k) (ec. 29) e3(k)= h 1 p(k) - h 1 m(k) (ec. 30) e4(k)= W2 p(k) - W2 m(k) (ec. 31) e5(k)= C2 p(k) - C2 m(k) (ec. 32) La derivada parcial de J con respecto a un peso (W) en la red neuronal es N al 1 aWii N ei(k) k =0 1=1 Sin embargo: ae 1 (k) aWlm(k) aw ii aw•• ae2(k) — - 9C1m(k) aw•• ae3 (k) awu ae4(k) aw•• De5(k) aw•• awu ahl m(k) awu aW2m(k), aw•• aC2m(k), aw awiJ (ec. 33) (ec. 34) (ec. 35) (ec. 36) (ec. 37) (ec. 38) Por lo tanto, el vector de pesos W de la red multicapas del modelo identificador puede 86 71 ANALES de la Universidad Metropolitana ajustarse observando el gradiente promedio durante un tiempo finito pero suficientemente largo. De esta forma el procedimiento de adaptación siguiente es propuesto N W(ko + N) = W(ko) + I 1[e 1 (k) 9W 1 rn(k) + e2(k) 1 m(k) aw.. N aw.. k=0 + e3(k) ghim(k) + e4(k) aW2m(k) e5(k) aC2m(k) aw..u aW..u aw.. (ec. 39) donde b.1 es el tamaño del paso en el procedimiento de gradiente, las cantidades m(k), aw.. acim(k), ah m(k), aW2m(k), aC2m(k), aw.. JW.. aw..u aw.. dependerán del tipo de función de activación de la red. En nuestro caso se utilizará la tangente hiperbólica como función de activación debido a que el algoritmo de adaptación es del tipo de gradiente y se requieren salidas bipolares. La red neuronal empleada en el modelo será del tipo multicapas con dos capas 3 escondidas y pertenecerá a la clase 12, . La elección de dicha clase no está 11,i2,13.5 orientada por ninguna regla analítica, lo que se persigue es proporcionarle a la red la mayor cantidad de información posible. Las once entradas son: S(k), B1 (k), B2(k), F(k), hf(k), Cf(k), Wl(k), Cl (k), hl (k), W2(k) y C2(k) y las cinco salidas, las variables a identificar, son: Wl(k+1), Cl (k+1), hl (k+1), W2(k+1) y C2(k+1). El número de neuronas en las dos capas escondidas i2,i3 se determina por ajustes experimentales. V. Resultados Con el objeto de poseer una medida cuantitativa de la disimilitud entre las salidas de la planta y las del modelo identificador se proponen las siguientes normas. a) Raíz cuadrática media del error (RMS) N / [Y (n) - (ec. 40) YA01)12 RMS = „, ,V N b) Diferencia porcentual de la raíz cuadrática media del error (PRD) N [Y(n) YA(n)]2 PRD = x 100, n=1 (ec. 41) Y(n)2 87 u 71 ANALES de la Universidad Metropolitana donde N: Intervalo de tiempo considerado, Salida de la planta, y (n): salida del modelo. La red empleada en este caso pertenece a la clase 12 3 con pi = 0.25. Las entradas Cl i ( t), Cl m ( t) 1 %1 a la red son: S, F, Cf, hf, C1, hl ,B1 ,b2,W1,W2 y C2 y las salidas Cl , C2, W1 ,W2 y hl , los pesos se actualizan continuamente para todo t e IR+. En las figuras 5-7 se presentan los resultados junto a las normas de disimilitud. La figura 5 ofrece la identificación de la concentración en el primer efecto, la figura 6 ilustra, a su vez, la identificación de la entalpía en el primer efecto y finalmente, la figura 7 muestra la identificación de la concentración en el segundo efecto. En todos los resultados se puede apreciar el seguimiento bastante exacto por parte del modelo identificador de las salidas del evaporador, note incluso que las normas de disimilitud son prácticamente cero. 6 RMS = 0.01 PRD = 0.23 % 5 4 . o 50 100 150 ¡ Tiempo [mira 200 Figura 5. Identificación de la concentración en el primer efecto. 154 E RMS = 0.06 PRD = 0_04 % modelo — 153 152 'Tiempo [mira o 50 100 150 200 Figura 6. Identificación de la entalpía en el primer efecto. 88 Lj ANALES 71 de la Universidad Metropolitana RMS = 0.04 PRD = 0_03 % 7 . 50 100 . 150 ,Tiempo [m'in] 200 Figura 7. Identificación de la concentración en el segundo efecto. Bibliografía [1] Andre, H. y Ritter, R. (1968). Dynamic Response of a Double Effect Evaporator. The Canadian Journal of Chemical Engineering, vol. 46, pp. 259-264, ag. [2] Bhat, N., Minderman, P., McAvoy, T. y Wang N. (1990). Modeling Chemical Process Systems via Neural Computation. IEEE Control Systems Magazine , vol. 10, no. 3, pp 24-30, apr. [31 Cotter, N. (1990). The Stone-Weierstrass Theorem and lis Application to Neural Networks. IEEE Transactions on Neural Networks , vol. 1, no. 4, pp 290-295, dec. [4] Chen, S. y Billings (1990). Non-linear Systems ldentification using Neural Networks. International Journal of Control , vol. 51, no. 6, pp. 1191-1214. [5] Narendra, K. y Parthasarathy, K. (1989). Neural Networks and Dynamical Systems. Part II: ldentification. Technical Report 8902 for Systems Science, Department of Electrical Engineering, Yale University. [6] Narendra, K. y Parthasarathy, K. (1990). ldentification and Control of Dynamical Systems Using Neural Networks. IEEE Transactions on Neural Networks , vol. 1, no. 1, pp 4-27, march. 171 Narendra, K. y Parthasarathy, K. (1990). ldentification and Control of Dynamical Systems Using Neural Networks - Part II. Proc. of the Sixth Yale Workshop on Adaptive and Learning Systems», ag. [8] Narendra, K. y Parthasarathy, K. (1991). Gradient Methods for the Optimization of Dynamical Systems Containing Neural Networks. IEEE Transactions on Neural Networks , vol. 2, no. 2, pp 252-262, nnarch. 89 u 71 ANALES de la Universidad Metropolitana [9] Newell, R. y Fisher, D. (1972). Model Development, Reduction, and Experimental Evaluation for an Evaporator. Ind. Eng. Chem. Process Des. Develop. , vol. 11, no 2, pp 213-221. [10] Oppenheim, A. y Schafer, R. (1989). Discrete-Time Signal Processing. PrenticeHall. [11] Ritter, R. and Andre, H. (1970). Evaporator Control System Design. The Canadian Journal of Chemical Engineering , vol. 48, pp. 696-701, dec. [12] Teppa, P. y Ferrer, J. (1994). ldentification of a Double Effect Evaporator using Neural Networks, Proc. of the IMACS International Symposium on Signal Processing, Robotics And Neural Networks , apr. 90
© Copyright 2026